"Intervenciones basadas en Interacción Humano-Robot para Manejo de Comportamientos Problemáticos en Adultos Mayores con Demencia "
Dagoberto Cruz Sandoval
Asesor: Dr. Jesús Favela Vara
Envejecimiento & Demencia
Según predicciones de la Organización Mundial de la Salud (OMS), la expectativa de vida se ha incrementando, lo que da pie a un envejecimiento poblacional alrededor del mundo [1].
[1]World Health Organization. Good Health adds life to years, Global brief for World Health Day 2012, Publications of the World Health Organization, WHO Document Production Services, 2012.
[2]Instituto Nacional de Geriatría. Plan de acción Alzheimer y otras demencias. México. 2014.

Envejecimiento & Demencia
Se estima que 35.6 millones de personas sufren demencia, y para el 2040 se estima que serán 90 millones [3].
La demencia es una enfermedad de naturaleza crónica y progresiva, caracterizado por el deterioro de las funciones cognoscitivas y de la conducta, lo que ocasiona discapacidad y dependencia.
[3] Alzheimer’s Disease International, World Alzheimer Report 2009, Executive Summary, pp. 1–24, 2009.
Envejecimiento & Demencia
El caso de México
[4] Sosa, A. L., Albanese, E., Stephan, B. C. M., Dewey, M., Acosta, D., Ferri, C. P., … Stewart, R. Prevalence, Distribution, and Impact of Mild Cognitive Impairment in Latin America, China, and India: A 10/66 Population-Based Study. PLoS Medicine, 9(2), e1001170, 2012.

Comportamientos Problemáticos
Desafortunadamente, actualmente no existe una cura permanente para la demencia.
Además del deterioro cognitivo, los adultos mayores con demencia (AcD) frecuentemente presentan síntomas conductuales y psicológicos de la demencia (SCPD), también conocidos como comportamientos problemáticos [5].
[5] K. Burns, R. Jayasinha, R. Tsang, Behavior Management: A Guide to Good Practice. Dementia Collaborative Research Centre - Assessment and Better Care, 2012.
Comportamientos Problemáticos
Los comportamientos problemáticos incluyen ansiedad, depresión, psicosis, agresión, apatía, agitación, deambulación, desinhibición, trastornos del sueño, entre otros.
[6] Sadowsky, C.H. and Galvin, J.E., 2012. Guidelines for the management of cognitive and behavioral problems in dementia. Journal of the American Board of Family Medicine : JABFM, 25(3), pp.350–366..
90% de los AcD que padecen Alzheimer exhiben este tipo de comportamientos problemáticos.
Comportamientos Problemáticos
La medicación ha sido la forma tradicional de manejar los comportamientos problemáticos en AcD. Sien embargo, los efectos secundarios de este tipo de medicamentos, ponen de manifiesto la necesidad de alternativas no farmacológicas para atender los SCPD.
[7] Association, A.P. et al., 2013. Alzheimer’s disease facts and figures. Alzheimer’s & Dementia, 9(2), pp.208–245.
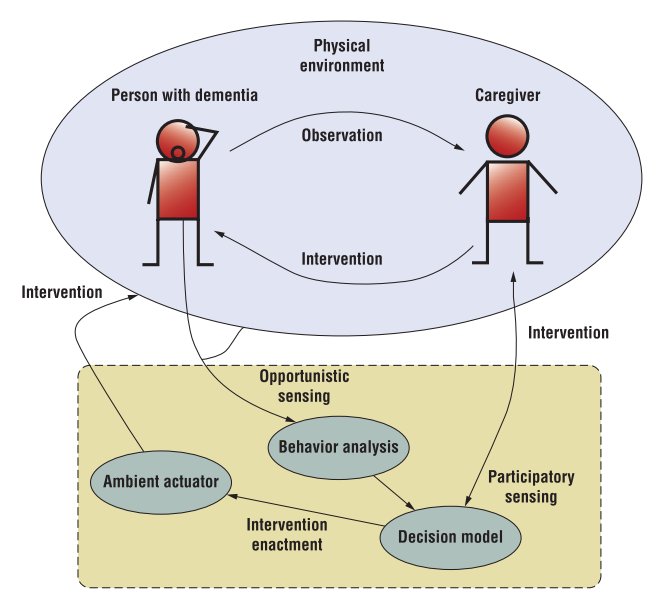
Sistemas para Intervenciones Asistidas por el Ambiente (SIAA)
[8] Navarro, R.F., Rodríguez, M.D. and Favela, J., 2014. Intervention tailoring in augmented cognition systems for elders with dementia. IEEE Journal of Biomedical and Health Informatics, 18(1), pp.361–367.



Robots

Sistemas para Intervenciones Asistidas por el Ambiente (SIAA)
A medida que las intervenciones no farmacológicas están ganando reconocimiento internacional, el diseño de sistemas autónomos para la estimulación de las capacidades físicas y cognitivas de los AcD, con la mínima necesidad de supervisión humana se ha convertido recientemente en un campo de investigación muy activa, lo que lleva a la definición de una clase específica de robots: Robots de Asistencia Social (RAS).
Robótica de Asistencia Social (RAS)
Entre los diferentes tipos de intervenciones en los AcD, la terapia de ejercicios físicos, la interacción afectiva y social, y la compañía se pueden abordar por medio de la tecnología, en particular por los Robots de Asistencia Social (RAS).
Robótica de Asistencia Social (RAS)
Los sistemas RAS, emplean estrategias de interacción “hands-off”, incluyendo comunicación auditiva, expresiones faciales y gestos comunicativos, para proporcionar la asistencia de acuerdo a un contexto de cuidado de salud determinado [9].
[9] D. J. Feil-Seifer and M. J. Mataric, “Defining socially assistive robotics,” in Proc. Int. Conf. Rehabil. Robot., Chicago, IL, pp. 465–468, Jun. 2005.
Robótica de Asistencia Social (RAS)
Trabajos previos con sistemas RAS, incluyen propuestas que se han desarrollado y probado para pacientes con problemas cerebrovascular [10], pacientes con Alzheimer [11], niños con desordenes de autismo [12], y en adultos y ancianos con buena salud [13, 14].
[10] Matarić M.J, Eriksson J, Feil-Seifer D.J, Winstein C.J. Socially assistive robotics for post-stroke rehabilitation. J. Neuroeng. Rehabil. 4(5); February 2007.
[11] Tapus A, Tapus C, Matarić M. The use of socially assistive robots in the design of intelligent cognitive therapies for people with dementia. In: Proc. IEEE Int. Conf. Rehabil. Robot. Kyoto, Japan; 924–929: 2009.
[12] Feil-Seifer D.J, Matarić M.J. Towards the integration of socially assistive robots into the lives of children with ASD. In: Human-Robot Interaction Workshop on Societal Impact: How Socially Accepted Robots Can Be Integrated in Our Society. San Diego, CA; March 2009.
[13] Fasola J, Matarić M.J. Robot motivator:Increasing user enjoyment and performance on a physical/cognitive task. In: Proc. IEEE Int. Conf. Develop. Learn. Ann Arbor, MI; 274–279: August 2010.
[14] Fasola J, Matarić M.J. Robot exercise instructor: a socially assistive robot system to monitor and encourage physical exercise for the elderly. In: Proc. 19th IEEE Int. Symp. Robot Human Interactive Commun. 416–421; September 2010.
Interacción Humano-Robot (IHR)
La Interacción Humano-Robot (IHR) es un campo de estudio dedicado a la comprensión, diseño y evaluación de sistemas robóticos para usar por, o con, los seres humanos. IHR tiene como objetivos principales mejorar la interacción entre seres humanos y robots, y desarrollar robots que sean capaces de funcionar de manera efectiva en dominios del mundo real, trabajando y colaborando en actividades de la vida diaria con el humano [15].
[15] Salvine, P., Nicolescu, M., & Ishiguro, H.. Benefits of Human - Robot Interaction [TC Spotlight]. IEEE Robotics & Automation Magazine, 18(4), 98–99, 2011.
Interacción Humano-Robot (IHR)
La robótica de asistencia social es un reto importante dentro de IHR, debido a que enfatiza la interacción próxima con personas que pueden llegar a tener algún tipo de discapacidad. Además, de proporcionar ayuda y cuidado físico, los desafíos incluyen el apoyo a las interacciones sociales efectivas a través computo afectivo, incluyendo interacciones naturales como gestos y lenguaje natural [16, 17].
[16] Goodrich, M. a., & Schultz, A. C.. Human-Robot Interaction: A Survey. Foundations and Trends® in Human-Computer Interaction, 1(3), 203–275, 2007.
[17] Kahn, P. H., Freier, N. G., Kanda, T., Ishiguro, H., Ruckert, J. H., Severson, R. L., & Kane, S. K.. Design patterns for sociality in human-robot interaction. Proceedings of the 3rd International Conference on Human Robot Interaction - HRI ’08, 97. 2008.
Trabajo Previo - RAS en Adultos Mayores
[18] McColl, D., Louie, W.-Y. G., & Nejat, G.. Brian 2.1: A socially assistive robot for the elderly and cognitively impaired. IEEE Robotics & Automation Magazine, 20(1), 74–83. 2013.
[19] Fasola, J., & Mataric, M. J.. Using Socially Assistive Human–Robot Interaction to Motivate Physical Exercise for Older Adults. Proceedings of the IEEE, 100(8), 2512–2526, 2012.
[20] Jayawardena, C., Kuo, I., Datta, C., Stafford, R. Q., Broadbent, E., & MacDonald, B. A.. Design, implementation and field tests of a socially assistive robot for the elderly: HealthBot version 2. In 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob) (pp. 1837–1842). 2012.


Brian 2.1 [18]
Bandit [19]
HealthBot 2 [20]
PARO
PARO cubre algunas de las percepciones y necesidades del adulto mayor, incluyendo la atención por largos periodos, recibir atención, estimulación positiva emocional y social, y al mismo tiempo proporcionar tiempo libre a los cuidadores para realizar otras actividades [21].

[21] Shibata, T.. Therapeutic Seal Robot as Biofeedback Medical Device: Qualitative and Quantitative Evaluations of Robot Therapy in Dementia Care. Proceedings of the IEEE, 100(8), 2527–2538. 2012.
PARO - Evaluación Cualitativa y Cuantitativa
Cualitativa por observación:
- Mejora de la comunicación
- Reducción de la agresión
- Reducción deambulación
- Mejora la sociabilidad
[21] Shibata, T.. Therapeutic Seal Robot as Biofeedback Medical Device: Qualitative and Quantitative Evaluations of Robot Therapy in Dementia Care. Proceedings of the IEEE, 100(8), 2527–2538. 2012.
PARO - Evaluación Cualitativa y Cuantitativa
[22] Wada, K., Shibata, T., Musha, T., & Kimura, S. “Robot therapy for elders affected by dementia.” IEEE Engineering in Medicine and Biology Magazine, 27(4), 53–60, 2008.
[23] L. Lauth and L. Plank, PARO Study, Rep. Vincentian Collaborative Syst., 2010.
[24] Y. Kawaguchi, K. Wada, M. Okamoto, T. Tsuji, T. Shibata, and K. Sakatani, “Investigation of brain activity during interaction with seal robot by fNIRS,” in Proc. IEEE ROMAN, pp. 308–313, 2011.
[25] K. Nakamura, N. Inoue-Nakamura, and M. Taira, “Reading others’ emotional states,” presented at the 10th Int. Conf. Functional Mapping of the Human Brain, Budapest, Hungary, Jun.13–17, 2004.



Propuesta
Los resultados mostrados en investigaciones relacionadas con PARO, han motivado la hipótesis de nuestra propuesta, en donde se plantea que intervenciones basadas en la interacción humano-robot pueden funcionar para lidiar con comportamientos problemáticos específicos en AcD.
Preguntas de Investigación
Las siguientes preguntas de investigación han guiado la presente propuesta.
- ¿Cómo puede ser aplicada la Interacción Humano-Robot, en el dominio de las intervenciones no-farmacológicas, para el manejo de comportamientos problemáticos ?
- ¿Qué comportamientos problemáticos pueden ser manejados con una intervención basada en IHR?
- ¿Cómo diseñar interacciones afectivas, sociales y agradables entre un AcD y un RAS?
- ¿Cómo puede un RAS detectar comportamientos problemáticos?
Objetivo General
“Diseñar, implementar y evaluar intervenciones basadas en interacción humano-robot por medio de robots de asistencia social, para el apoyo en el manejo de comportamientos problemáticos en adultos mayores con demencia”.
Objetivos Específicos
- Realizar estudios contextuales con AcD, para obtener información acerca de comportamientos problemáticos, así como definir intervenciones para el manejo de tales comportamientos.
- Establecer las características del RAS para poder implementar este tipo de intervenciones.
- Definir las características de la intervención, para propiciar la empatía y buena interacción entre el AcD y el robot.
- Diseñar e implementar las intervenciones de apoyo al manejo de comportamientos problemáticos.
- Evaluar las intervenciones en contextos reales.
Metodología
La metodología para el desarrollo de la propuesta consta de tres etapas, haciendo alusión a las fases genéricas de IHR: comprensión, diseño y evaluación.
Metodología

[26] John Zimmerman, Jodi Forlizzi, and Shelley Evenson. 2007. Research through design as a method for interaction design research in HCI. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (CHI '07). ACM, New York, NY, USA, 493-502
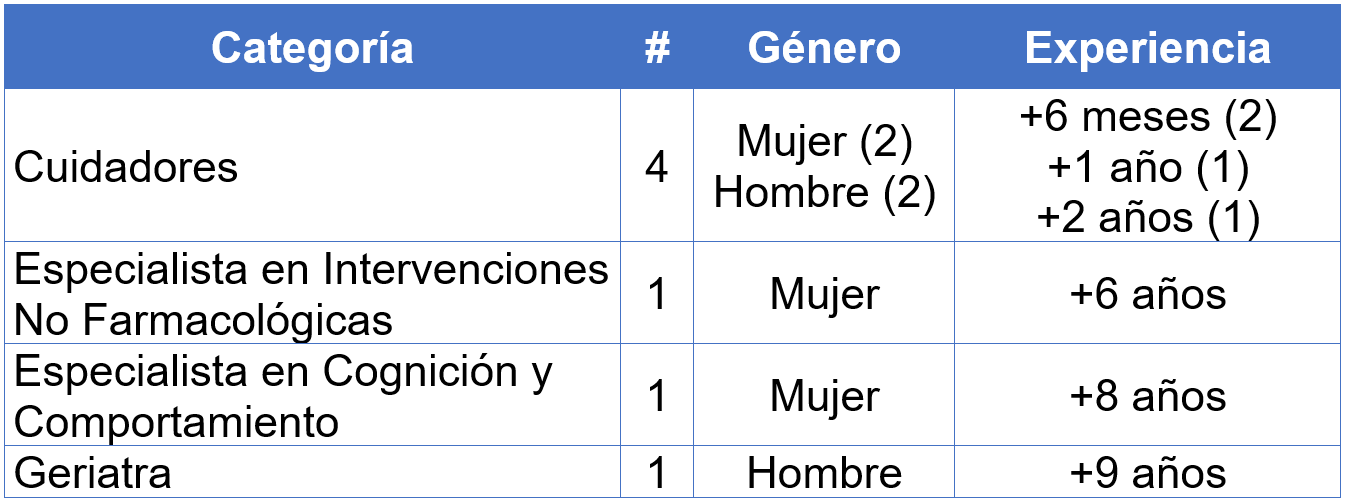
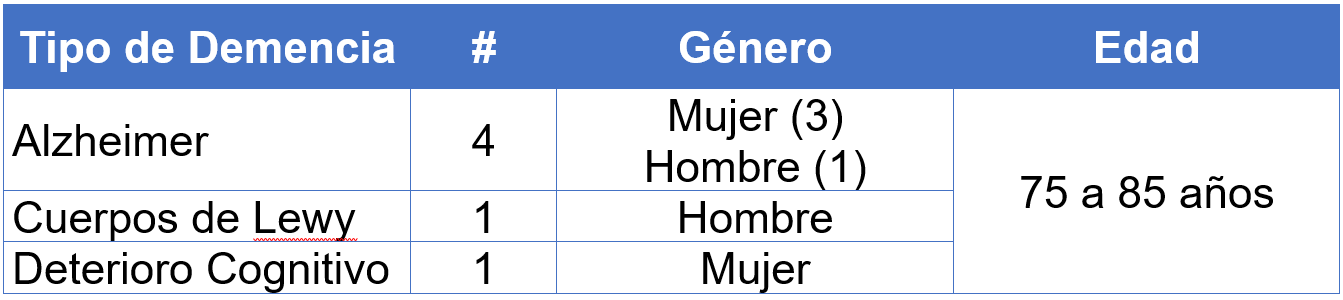
Estudio Contextual

Estudio Contextual - Preliminar

Escenarios Preliminares
Los resultados preliminares obtenidos sugieren algunos escenarios viables para apoyar la intervención con un sistema RAS.
Se diseñaron tres escenarios preliminares para las intervenciones basadas en IHR para hacer frente a los SCPD en AcD. Cada una de las intervenciones propuestas se centran en diferentes comportamientos problemáticos.
Escenario 1
Carmen es residente en una casa de asistencia. Ella tiene 82 años y sufre de Alzheimer. Ella es muy sociable y de las más activas dentro de la casa. Carmen frecuentemente sufre episodios de ansiedad, gritando y corriendo por la casa, lo cual es riesgoso para ella y para otros residentes. Mientras deambula, Carmen empieza a acelerar sus pasos, a mostrarse desorientada y hablar sola, señales claras de que esta experimentado un cuadro de ansiedad. No de lejos de ella se encuentra Alan, el robot, que monitorea a Carmen y a otros residentes, por medio de un brazalete que registra las señales fisiológicas de los residentes. En base a estos datos, Alan infiera la ansiedad de Carmen y se desplaza hasta ella. Carmen reconoce al robot Alan y lo saluda. Alan se mueve y genera sonidos como una forma de comunicación no verbal para distraer y tranquilizar a Carmen. Ella abraza y juega con Alan, lo cual reduce su ritmo cardíaco y transpiración.
Escenario 1

Escenario 2
Olga es una instructora de yoga que ha trabajado con adultos mayores los últimos 10 años. Como cada Viernes por la mañana ella se prepara para llevar a cabo su terapia en la residencia geriátrica. Ella ha traído consigo a Eve, su robot asistente y explica a los adultos mayores participantes que Eve realizará todos los ejercicios de la terapia. Los residentes se motivan al ver como Eve realiza todos los movimientos que Olga ejecuta. A la mitad de la terapia, Olga instruye a Eve para continuar con la siguiente parte de la sesión, y Eve responde realizando los nuevos ejercicios y reproduce la música apropiada para esta parte de la sesión. Mientras los residentes siguen los movimientos de Eve, Olga auxilia a uno de los residentes que tiene movilidad limitada y tiene dificultades para seguir el ritmo de la terapia.
Escenario 2

Escenario 3
Ramiro es un adulto mayor de 85 años que sufre demencia de cuerpos de Lewy. El vive en una residencia geriátrica ya que el necesita cuidados continuos que su familia no le puede proporcionar. El frecuentemente se desorienta y no sabe en donde se encuentra o a donde ir. Además, Ramiro presenta rigidez muscular excesiva, lo que lo hace susceptible a caídas. or lo que la mayoría del tiempo se la pasa en su cuarto y en cama, y es necesario el uso de pañal. Eduardo, un cuidador en la residencia, debe de cambiar de pañal a Don Ramiro. En el camino hacia la habitación de Ramiro recoge a "Bob", el robot de asistencia. Eduardo entra a la habitación y pone en los brazos de Ramiro a Bob. Ramiro dice: "¡Es bueno verte de nuevo Bob!". Mientras Ramiro abraza y juega con Bob, Eduardo cambia el pañal. Sin la ayuda del robot, el cambio de pañal sería algo complicado para Eduardo, con Ramiro resistiéndose y gritando.
Caracterización de los RAS
Cada uno de los escenarios anteriores se enfocan en el manejo de un comportamiento distinto. Debido a la naturaleza de las intervenciones, las características de los RAS utilizados es diferente.
El trabajo de Fong et al. [27], define las características y directrices más importantes a tomar en cuenta para un RAS. Estas características se deben de definir en base al contexto y objetivo de la asistencia con este tipo de tecnología.
[27] T. Fong, I. Nourbakhsh, and K. Dautenhahn, “A survey of socially interactive robots,” Robotics and Autonomous Systems, vol. 42, no. 3-4, pp. 143–166, 2003.
Caracterización de los RAS
| Morfología | Percepción | Emoción | Tiempo de Respuesta | Estructura | |
|---|---|---|---|---|---|
| Escenario 1 | Funcional/ Zoomorfa | Orientada a Humano | Alta | Tiempo real | Reconocimiento facial. Capacidad de desplazarse. Movimientos limitados. Detección de comportamientos y emociones. Emisión de sonidos. Sensible al tacto. |
| Escenario 2 | Antropomorfa | Orientado a servicio | Baja | Tiempo real | Reconocimiento de voz. Sintetizador de voz. Movimientos complejos. Reproducción de pistas de audio. Reconocimiento de instrucciones. |
| Escenario 3 | Zoomorfa | Orientado a humano | Alta | Tiempo real | Movimientos limitados. Sensible al tacto. Materiales agradable al tacto. Emisión de sonidos. Seguimiento de fuente de sonido. |
Conclusiones
Actualmente existen avances en la robótica, donde el objetivo no es proporcionar solo asistencia física sino brindar una estimulación a los humanos a través de la interacción social con un robot. Dos de estos campos son la Robótica de Asistencia Social (RAS) y la Interacción Humano-Robot (IHR).
Conclusiones
Los resultados preliminares del estudio contextual revelan las oportunidades y retos en el diseño de una intervención basada en IHR para el manejo de algunos SCPD. Estos resultados son basados en estudios cualitativos, pero se acoplan a la revisión de la literatura.
se presentan las siguientes consideraciones de diseño para intervenciones IHR apropiadas.
- El robot no pretende sustituir el cuidador.
- El robot debe incluir estrategias para crear empatía emocional con el AcD.
- Cada AcD experimenta la enfermedad en una forma diferente, exhibe un conjunto particular de SCPD y podría crear una relación emocional con un robot de diferentes maneras.
Aportaciones
- Diseño de intervenciones por medio de un RAS, para lidiar con comportamientos problemáticos en AcD.
- Un modelo de diseño e implementación de sistemas IHR de apoyo a intervenciones en AcD, mediante el estudio y adaptación de patrones de diseño utilizados en IHC.
- Un modelo y directrices para implementar intervenciones no farmacológicas basadas en IHR, para el manejo y reducción de comportamientos problemáticos en AcD.
- Datos cuantitativos y cualitativos derivados de los estudios contextuales sobre síntomas y comportamientos de personas que sufren demencia.
- Datos cuantitativos y cualitativos derivados del estudio de campo para la evaluación un sistema RAS para el apoyo de intervenciones en AcD.
Gracias por su Atención...
Presentación Propuesta 2
By Dago Cruz



