Introduction to Generative Modeling
Francois Lanusse @EiffL


Do you know this person?
Probably not, this is a randomly generated person: thispersondoesntexist.com
What is generative modeling?
- The goal of generative modeling is to learn the distribution from which the training set is drawn
- Usually, this means building a parametric model that tries to be close to
p
X = \{ x_0, x_1, \ldots, x_N \}
p
p_\theta




True
p
samples
x \sim p
Model
p_\theta
Why it isn't that easy
- The curse of dimensionality put all points far apart in high dimension
- Classical methods for estimating probability densities, i.e. Kernel Density Estimation (KDE) start to fail in high dimension because of all the gaps


Distance between pairs of points drawn from a Gaussian distribution
So how do we get to this ?

Hint: Deep Learning is involved...
The Evolution of Deep Generative Models
- Deep Belief Network
(Hinton et al. 2006)
- Variational Auto-Encoder
(Kingma & Welling 2014)
- Generative Adversarial Network
(Goodfellow et al. 2014)
- Wasserstein GAN
(Arjovsky et al. 2017)




A Visual Turing Test

Fake images from a PixelCNN
Real SDSS images
How are these models usefull for physics?
They are data-driven models, can complement physical models



VAE model of galaxy morphology
- They can learn from real data
- They can learn from simulations


- They can be orders of magnitude faster than a proper simulation and speed up significantly part of an analysis
Simulation of Dark Matter Maps
- They can be used alongside physical model to solve diverse problems

Observations
Model convolved with PSF
Model
Residuals


Observed data
Imagined solutions
DGM are a vast domain of research

Grathwohl et al. 2019
- We will focus on a subset of Latent Variable Models today: GANs and VAEs
Latent Variable Models
- We model using a mapping from a latent distribution to data space.
- To draw a sample from , follow this recipe:
- Draw a latent variable z from a known/fixed distribution, e.g. a Gaussian, of low dimension:
- Transform this random variable to the data space using a deep neural network :
- Draw a latent variable z from a known/fixed distribution, e.g. a Gaussian, of low dimension:
- The goal of the game is to find the parameters so that ends up looking realistic.
p_\theta
z \sim \mathcal{N}(0, I)
g_\theta
p_\theta
g_\theta
x = g_\theta(z)
\theta
x

z \sim \mathcal{N}(0, I)
x = g_\theta(z)
Problem: In the data, I only have access to the output , but how can I train if I never see the input ????
x
z
Why do we expect this to work? We are saying that the data can actually be represented on the low dimensionality manifold in latent space.
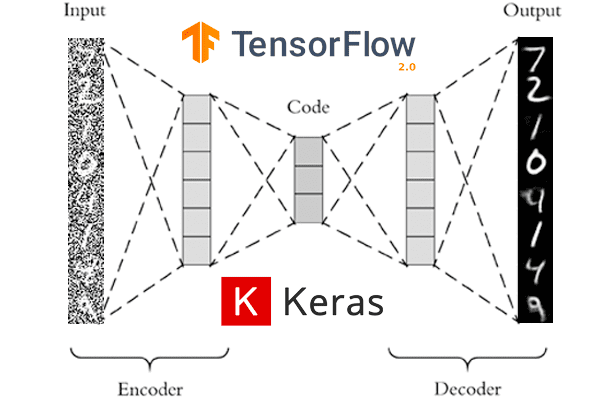
Part I: Auto-Encoders
The idea of auto-encoding:
Introduce a second network
z
The encoder tries to guess the latent variable that generates the image
Encoder
Decoder
z
\mathcal{L} = \parallel g_\theta( f_\phi(x) ) - x \parallel_2^2
The benefits of Auto-Encoding
- Because the code is low-dimensional, it forces the model to compress the information as efficiently as possible in just a few numbers.
-> A great way to do dimensionality reduction

Auto-Encoded MNIST digits in 2d
- Because they cannot preserve all of the information, they discard "noise", they can be used as denoisers
-> Denoising Auto-Encoders
- Because they only know how to reconstruct a specific type of data, they will fail on an example from a different dataset
-> Anomaly detection


Examples in Physics:
- Searching for New Physics with Deep Autoencoders, Farina et al. 2018
-
Variational Autoencoders for New Physics Mining
at the Large Hadron Collider, Cerri et al. 2019
Let's try it out!
- Guided tutorial on Colab at this link.


Main Takeaway
- Auto-Encoders can work very well to compress data
- They can't be directly used as generative models because we don't know a priori how the latent space gets distributed
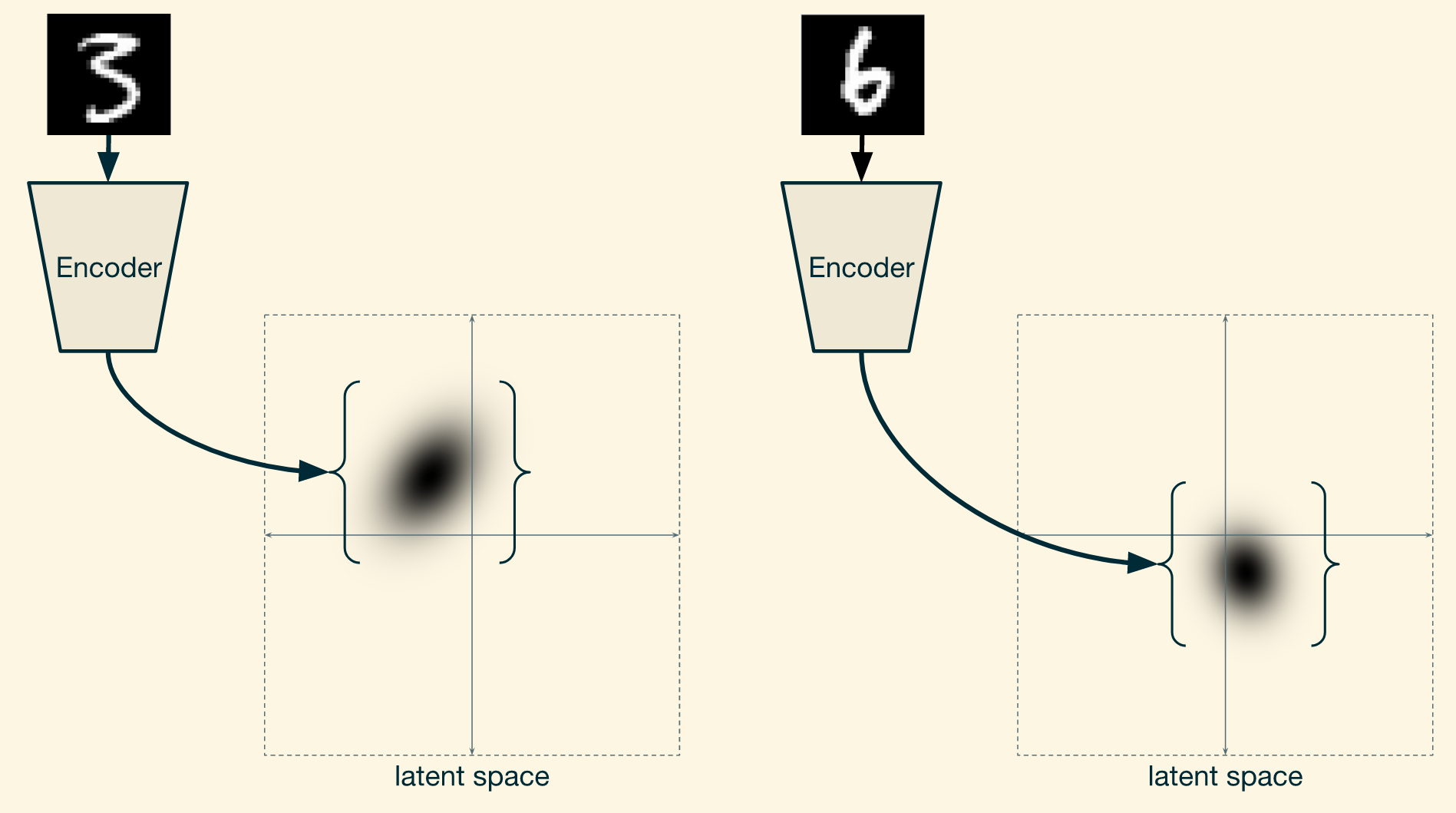
Part II: Variational Auto-Encoders
What is the difference to a normal Auto-Encoder?
- An Auto-Encoder has only one constraint: Encode and then Decode has best you can:
-> We never ask it to make sure that the latent variables follow a particular distribution. - If the latent space has regularity.... it's only by chance
\mathcal{L} = \parallel g_\theta( f_\phi(x) ) - x \parallel_2^2
z= f_\phi(x)

- A Variational Auto-Encoder tries to make sure that the latent variable follows a desired prior distribution:
because if we know that the latent space of the auto-encoder is Gaussian distributed, we can sample from it.
- To achieve this, a VAE is trained using the Evidence Lower Bound (ELBO):
z \sim \mathcal{N}(0, I)
p_{\theta, \phi}(x) \geq \mathbb{E}_{z \sim q(.|x) }\left[ \log p_\theta(x | z) \right] - D_\mathrm{KL}\left(q_\phi(z | x) \parallel p(z)\right)


Reconstruction Error
Code Regularization
Unpacking the ELBO
p_{\theta, \phi}(x) \geq \mathbb{E}_{z \sim q_\phi(.|x) }\left[ \log p_\theta(x | z) \right] - D_\mathrm{KL}\left(q_\phi(z | x) \parallel p(z)\right)
- The Likelihood term
-> Probability of image if is known.- This needs to assume some knowledge of the statistics of the signal x
- This needs to assume some knowledge of the statistics of the signal x
\log p_\theta(x | z)

p_\theta(x |z) = \mathrm{Bernoulli}( x | p=g_\theta(z) )
x
z

p_\theta(x |z) = \mathcal{N}( x | \mu=g_\theta(z); \Sigma=\sigma^2 I )
In this case, this is equivalent to the AE loss if
\sigma=1
\mathcal{L}_{AE} = \parallel g_\theta( z ) - x \parallel_2^2
Unpacking the ELBO
p_{\theta, \phi}(x) \geq \mathbb{E}_{z \sim q_\phi(.|x) }\left[ \log p_\theta(x | z) \right] - D_\mathrm{KL}\left(q_\phi(z | x) \parallel p(z)\right)
- The Posterior
-> Tries to estimate the probability of if image is known - This is what the encoder models.
q_\phi(z | x)
x
z
- The Kullback-Leibler Divergence
A distance between distributions: the Kullback-Leibler Divergence
Unpacking the ELBO
p_{\theta, \phi}(x) \geq \mathbb{E}_{z \sim q_\phi(.|x) }\left[ \log p_\theta(x | z) \right] - D_\mathrm{KL}\left(q_\phi(z | x) \parallel p(z)\right)

The ELBO is maximal when the input x is close to the output, and the code is close to a Gaussian
Reconstruction Error
Code Regularization
How do we build a network that outputs distributions?

q_\phi(z | x)
import tensorflow as tf
import tensorflow_probability as tfp
tfd = tfp.distributions
# Build model.
model = tf.keras.Sequential([
tf.keras.layers.Dense(1+1),
tfp.layers.IndependentNormal(1),
])
# Define the loss function:
negloglik = lambda x, q: - q.log_prob(x)
# Do inference.
model.compile(optimizer='adam', loss=negloglik)
model.fit(x, y, epochs=500)
# Make predictions.
yhat = model(x_tst)Let's try it out!
- Guided tutorial on Colab at this link.


Part III: Generative Adversarial Networks
What is a GAN?
- It is again a Latent Variable Model
- Contrary to a VAE, a GAN does not try to bound or estimate , instead the parameters are estimated by Adversarial Training.
p_\theta(x)
z \sim \mathcal{N}(0, I)
x = g_\theta(z)
z

x \sim p(x)
x \sim p_\theta(x)
- The Discriminator is trained to classify between real and fake images
- The Generator is trained to generate images that the discriminator will think are real
\arg\max_{\phi} \log d_\phi(x) + \log(1 - d_\phi(g_\theta(z)))
\arg\min_{\theta} \log(1 - d_\phi(g_\theta(z)))
Traditional GAN (Goodfellow 2014)
Spoiler Alert: GANs are difficult to train
- In this competition between generator and discriminator, you have to make sure they are of similar strength.
- Typically training is not convergent, the GAN doesn't settle in a solution but is constently shifting. You may get better results in the middle of training than at the end!
- Beware of mode collapse!

BigGAN
VQ-VAE
- Vanishing gradients far from data distribution

Arjovsky et al. 2017

WGAN-GP: Your Go-To GAN
- The discriminator/critic is computing a distance between two distributions (of real and fake images), a Wasserstein distance (hence the W).
-> This requires certain constraints on the critic (that's where the GP comes in). - The generator is trying to minimize that distance

- Training of the WGAN is still efficient even when the two distrtibutions are far apart.
What is this GP-thing?
- For the derivation of the WGAN to work, it requires a Lipschitz bound on the critic.
The Gradient Penalty is a way to impose that condition on the critic

How far will this take us?

128x128 images, state of the art in 2017
WGAN-GP

1024x1024, state of the art circa end of 2019
This is extremely compute expensive and extremely technical
Let's try it out!
- Guided tutorial on Colab at this link.

Introduction to Generative Modeling
By eiffl
Introduction to Generative Modeling
Slides for ANF Machine Learning




