











Erik Jansson
WASP and KAW postdoctoral fellow in the Cambridge Image Analysis Group and CRA at Wolfson College.
slides.com/erikjansson
PhD (project researcher) from Chalmers in Gothenburg
Same department where Mike did his postdoc
Me
Recent PhD from Chalmers in Gothenburg: Same department where Mike did his postdoc
Shape analysis and matching problems
Structure-preserving numerics for geometric mechanics
With Mike
Elliptic SPDEs on manifolds
for sampling of random fields
Recent PhD from Chalmers in Gothenburg: Same department where Mike did his postdoc
Shape analysis and matching problems
Structure-preserving numerics for geometric mechanics
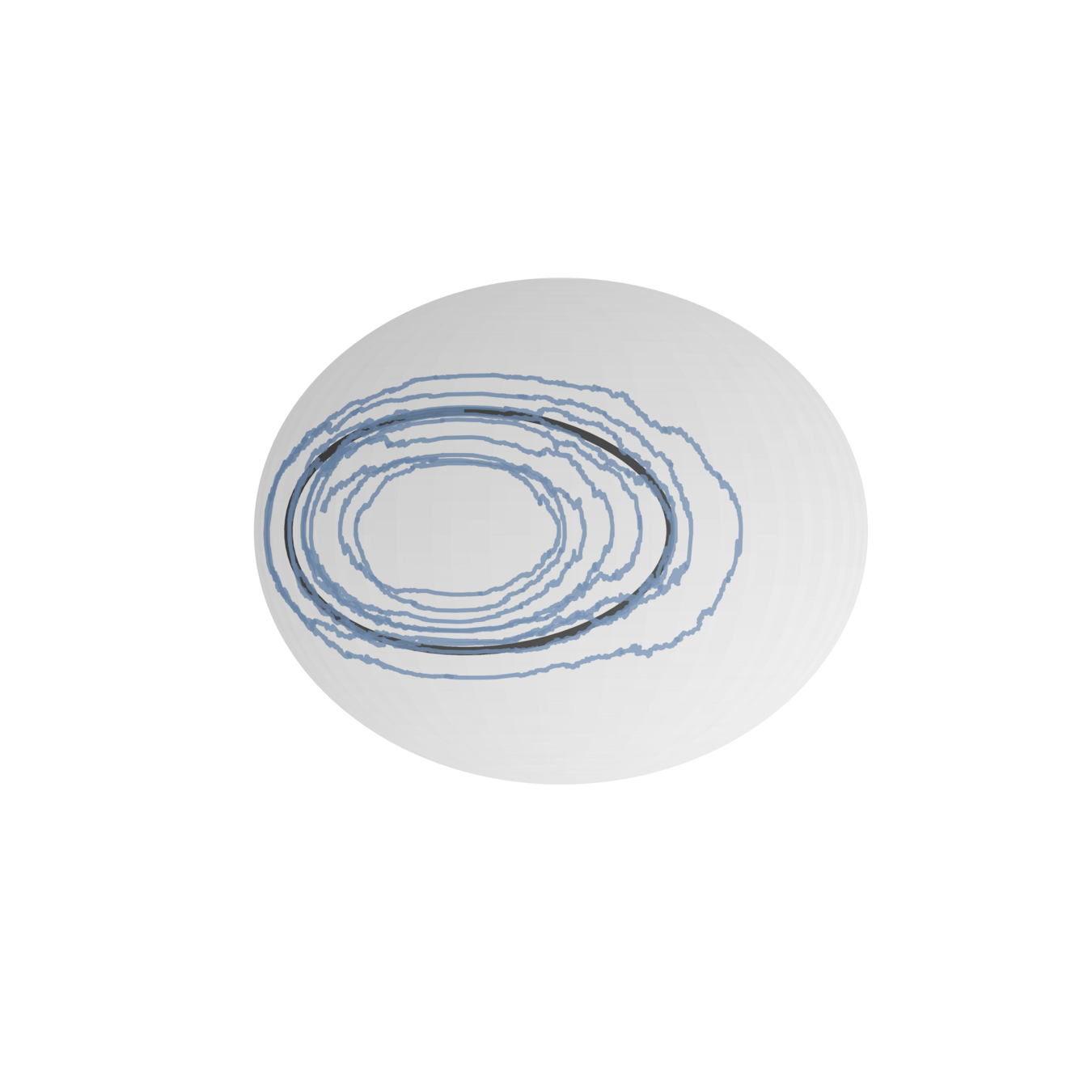
Elliptic SPDEs on manifolds
for sampling of random fields
With Mike
asdasdasd
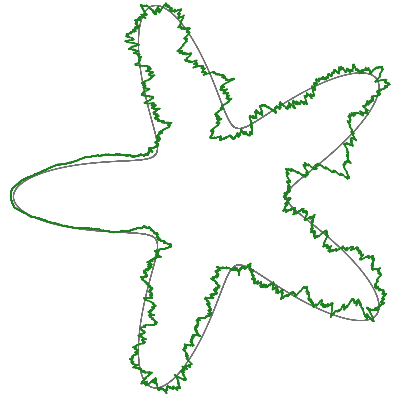
But what is a shape?
Point cloud on torus
Function on \([0,1]^2\)
Density on \([0,1]\)
Anything a diffeomorphism can act on!
(Diffeomorphism = smooth mapping that goes from domain to itself and has a smooth inverse)
A warp is determined by a time-dependent vector field \(v\)
A vector field generates a curve of diffeomorphisms \(\gamma: [0,1] \mapsto G = \operatorname{Diff}(M)\) by
\(\dot \gamma(t) = \nu(t, \gamma(t)), t \in [0,1], \gamma(0) = \operatorname{Id} \)
The optimal vector field is a minimizer of an energy!
Canonical choice! Use right-invariant metric
Expensive and difficult optimization problem.
However: Can be reduced to a dynamic (= differential equation) formulation!
Only depends on final value of \(\gamma(t)\)
Changes depending on application
Expensive and difficult optimization problem.
However: Can be reduced to a dynamic (= differential equation) formulation!
Only depends on final value of \(\gamma(t)\)
Depends on whole path
Changes depending on application
Key question: How does \(\nu\) evolve?
(Answer: Use calculus of variations, but with which energy?)
Expensive and difficult optimization problem.
However: Can be reduced to a dynamic (= differential equation) formulation!
Evolution of vector field does not care about matching!
Cannonball does not care about target
Use the Lagrangian \({\int_0^T \int_M L\nu(t) \cdot \nu(t)\mathrm{d}x\mathrm{d}t}_{}\)
Calculus of variations gives:
Matching by shooting
The ingredients you really need:
A Lie group of deformations \(G\) acting on a set of shapes \(V\) (metric space)
Flexible choice
Right-invariant metric (not so flexible)
Compute warp
Compute warp
Here, \(A\) and \(B\) are assumed to be elements in the same space.
What if we cannot directly observe B?
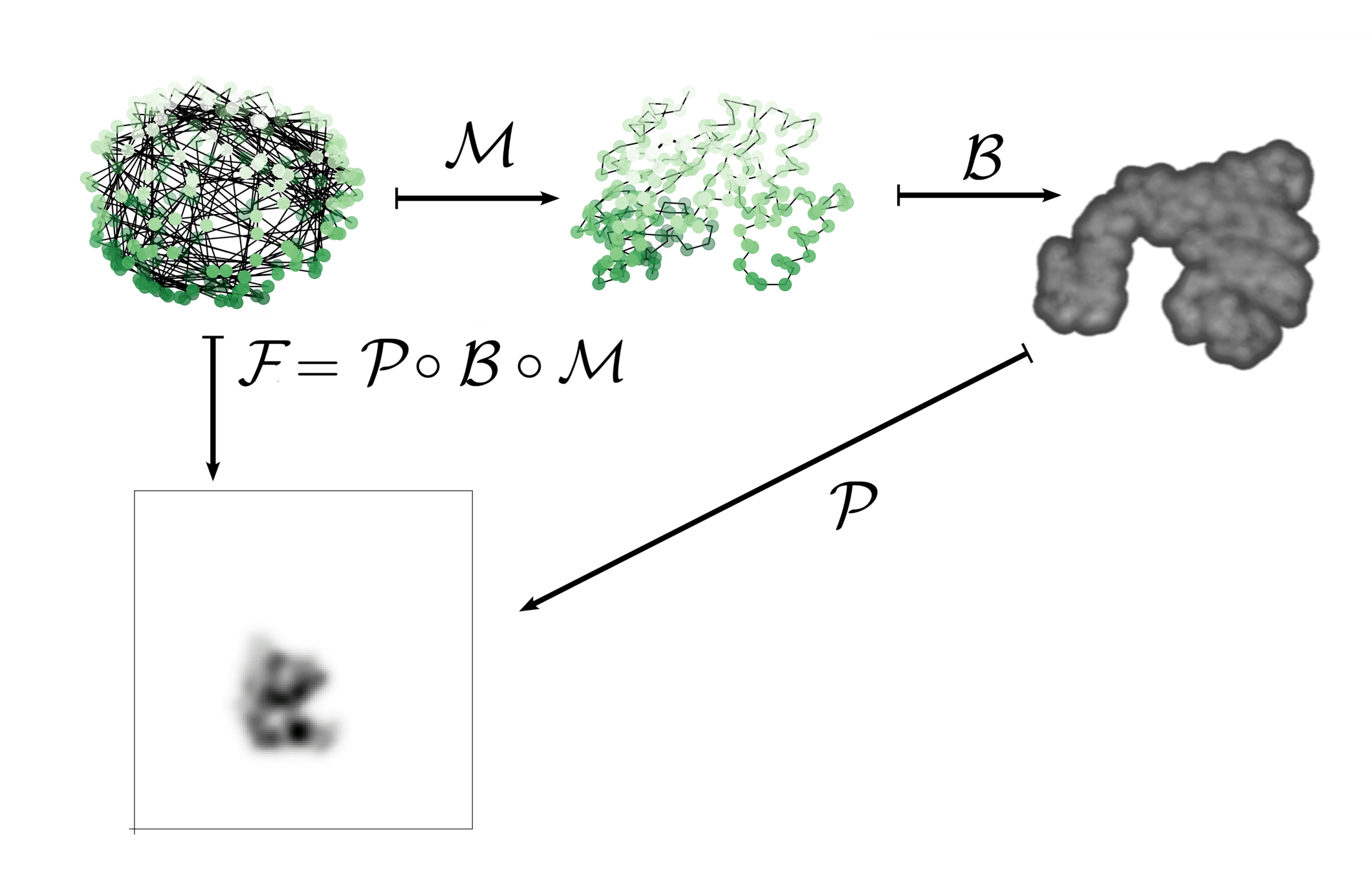
Include a forward operator \(\mathcal{F}\colon V \to W\)
Initial shape: \(A \in V\)
Target shape: \(B \in W\)
Doesn't affect mathematical framework!
"Reconstructs" the \(\gamma(1).A\) that best would map to \(B\)
Single-particle Homogeneous Cryo-EM in 30 seconds (by a maths person)
Electron
microscope
Low dose - low SnR
Many images
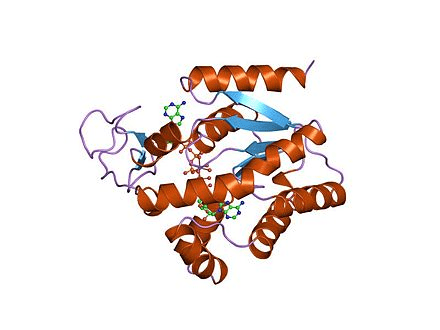
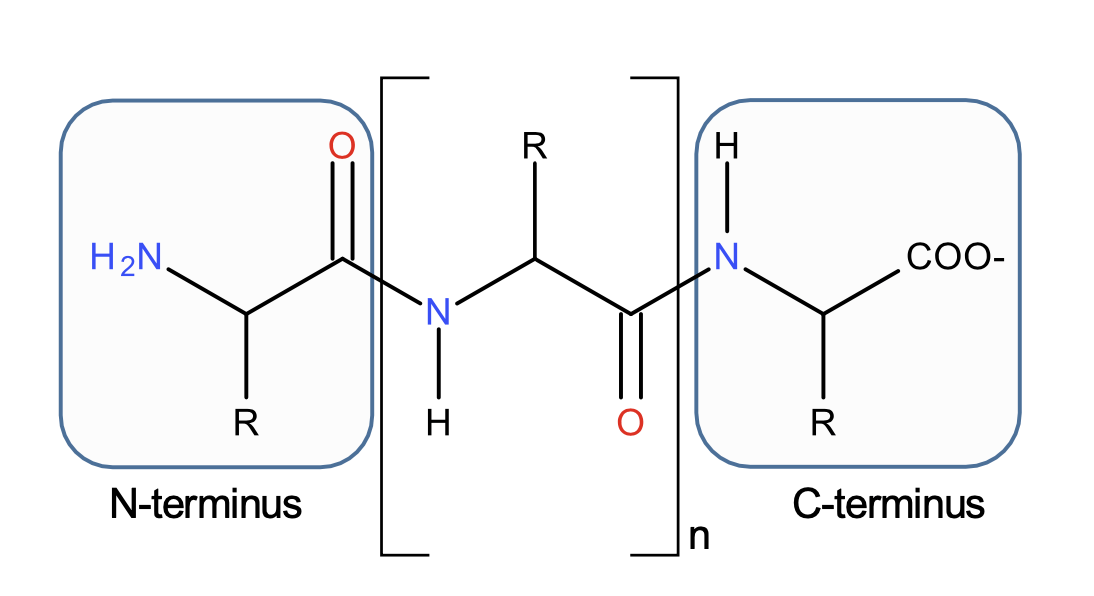
Proteins in 30 seconds (by a mathematician)
In this work: forget about everything but the \(C_\alpha\)s
Relative positions
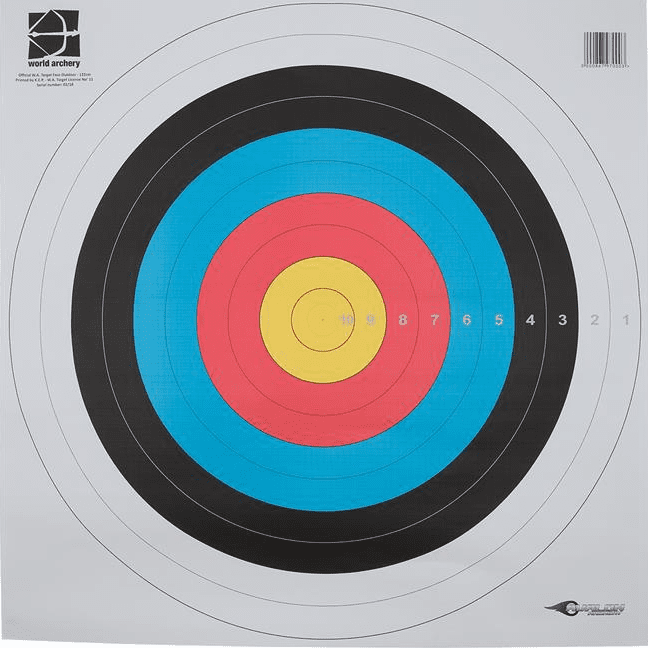
Goal:
Given noisy images
Reconstruct protein conformation
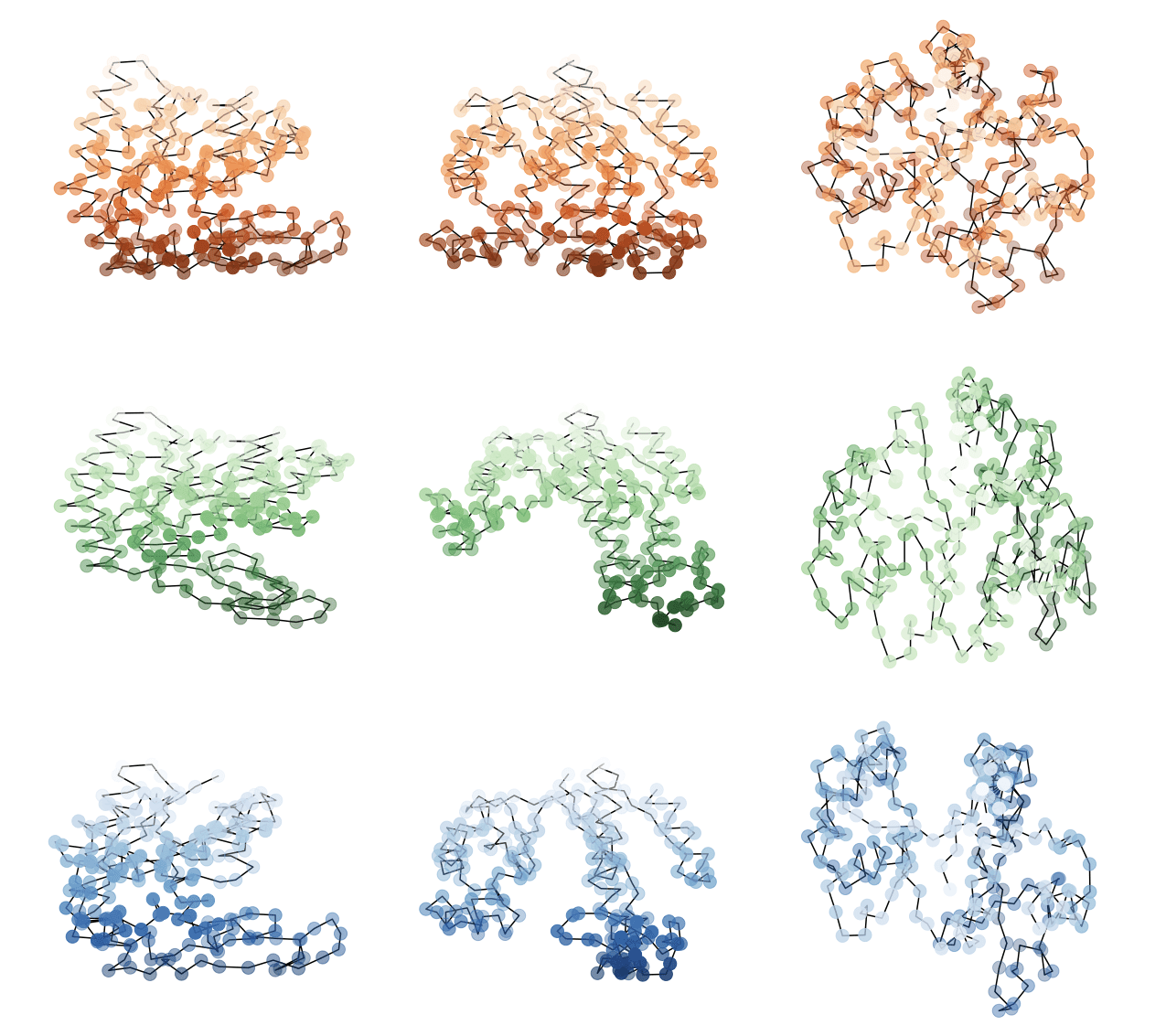
Idea: Use shape to deform a "prior", i.e., same protein in other conformation
Shape space: space of relative positions \(V = \mathbb{R}^{3N}\)
Data space - 2D images, \(L^2(\mathbb{R}^2)\) (very noisy!)
However: We want rigid deformations, so \(G = \operatorname{SO}(3)^N\), and \(\operatorname{dim}(G) \ll \operatorname{dim}(\operatorname{Diff}(M)) = \infty\)
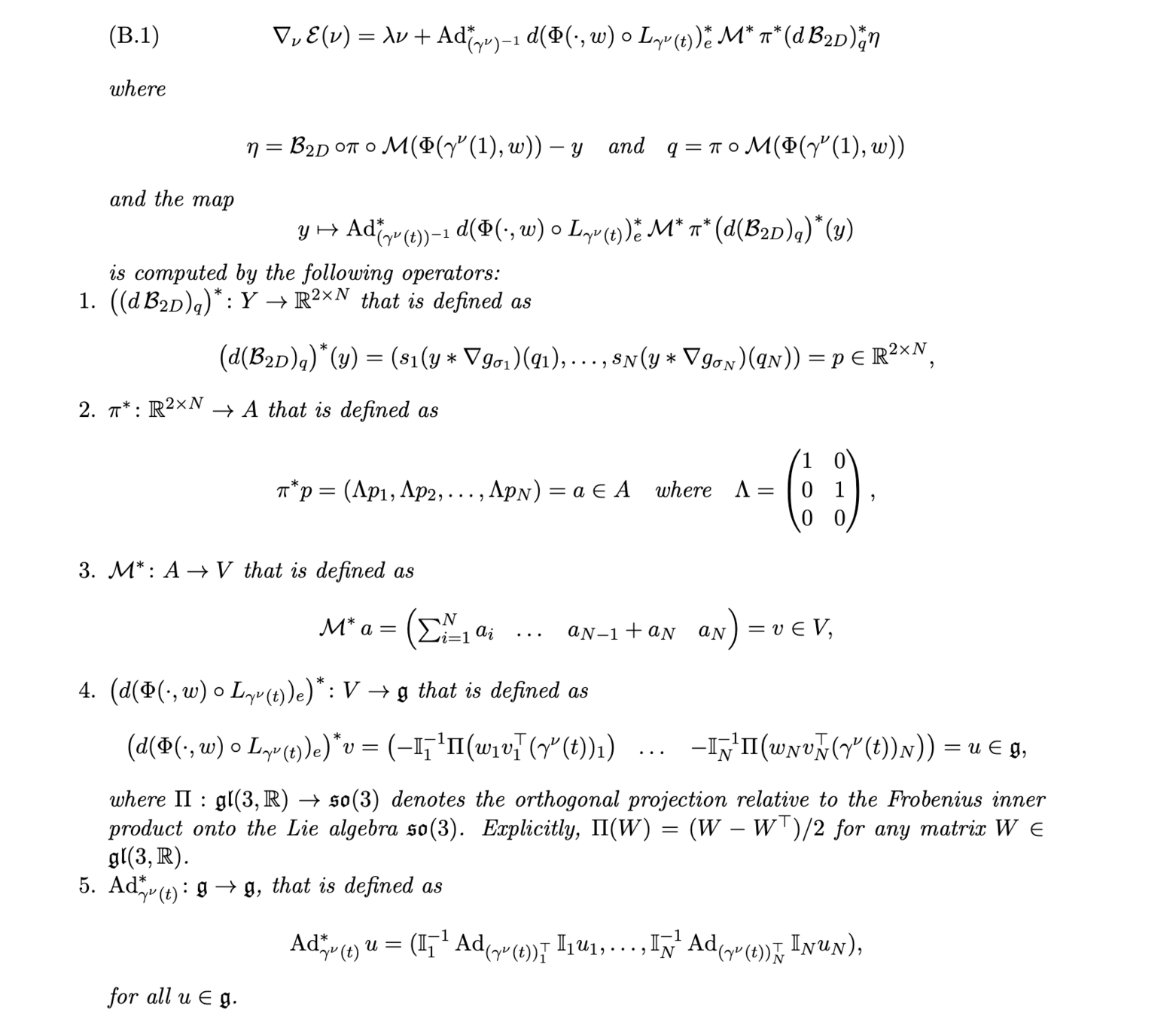
Todo: Construct forward model, decide on energy, compute gradients, set up optimization routine
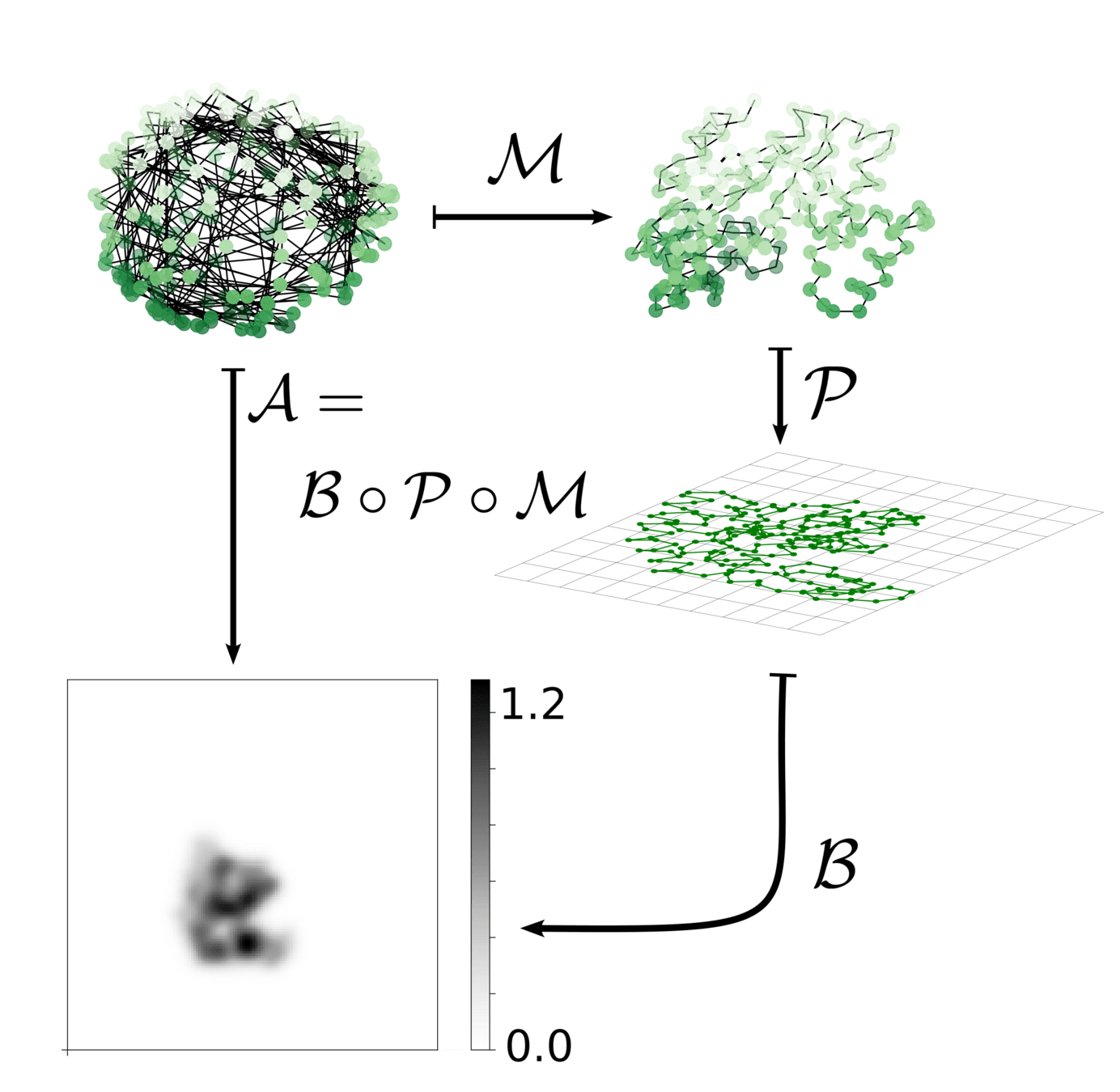
Forward model building
Forward model building
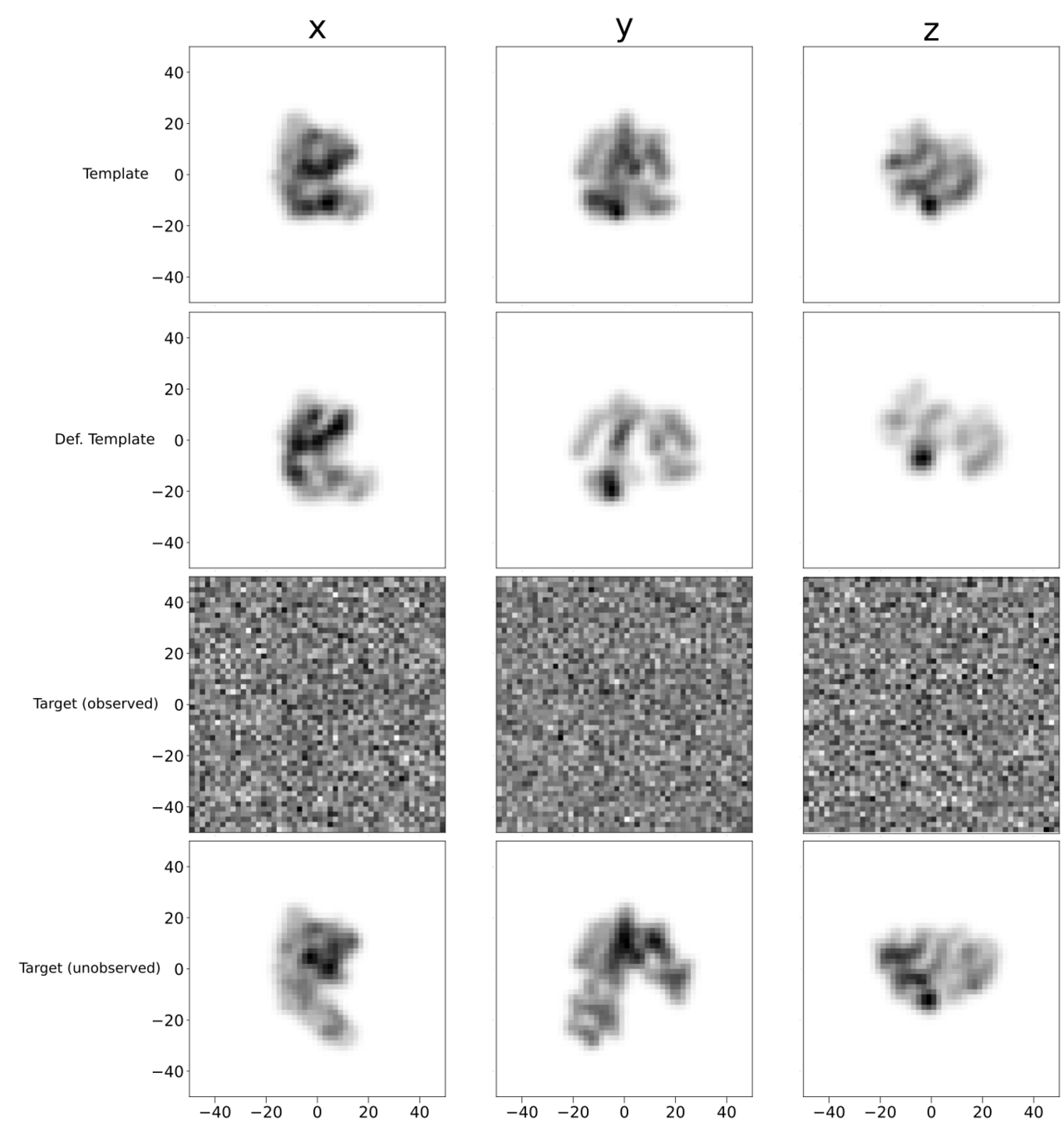
Similarity score is clear. For now: use x-y-z projections (3 images)
Similarity score is clear. For now: use x-y-z projections (3 images)
Gradient is available (even easy to compute)
(but ugly)
Gradient is available
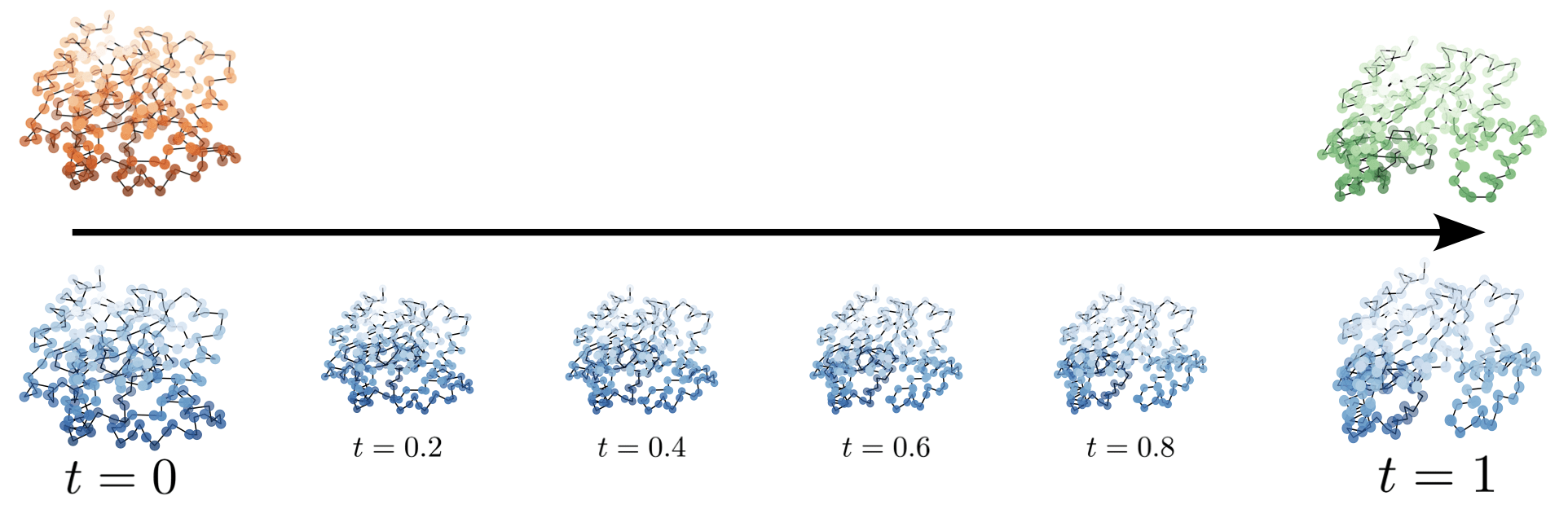
Deformation
What we want
What we see
Where we start
but....
x
y
z
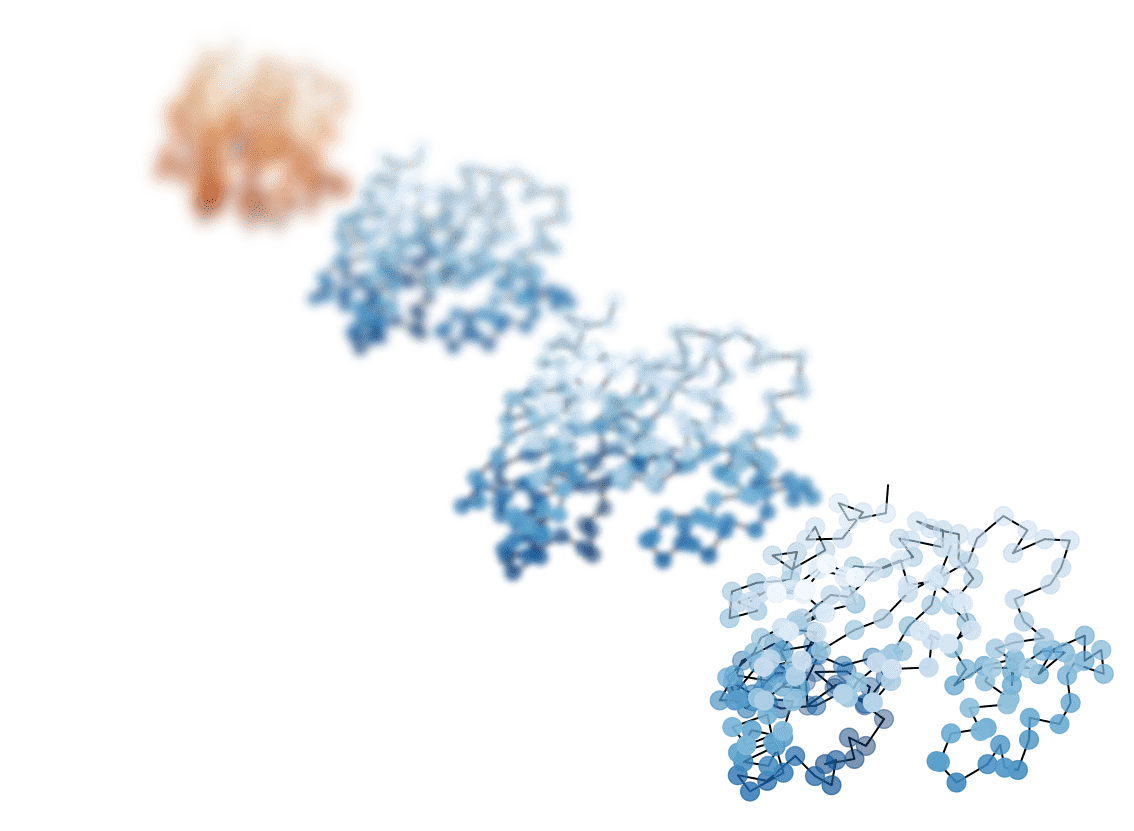
Deformed
Target
Template
Turn up number of images used
Decent in the directions we have projections
Deformation
What we want
What we see
Where we start
Deformation path
Note: Deformation makes no physical sense
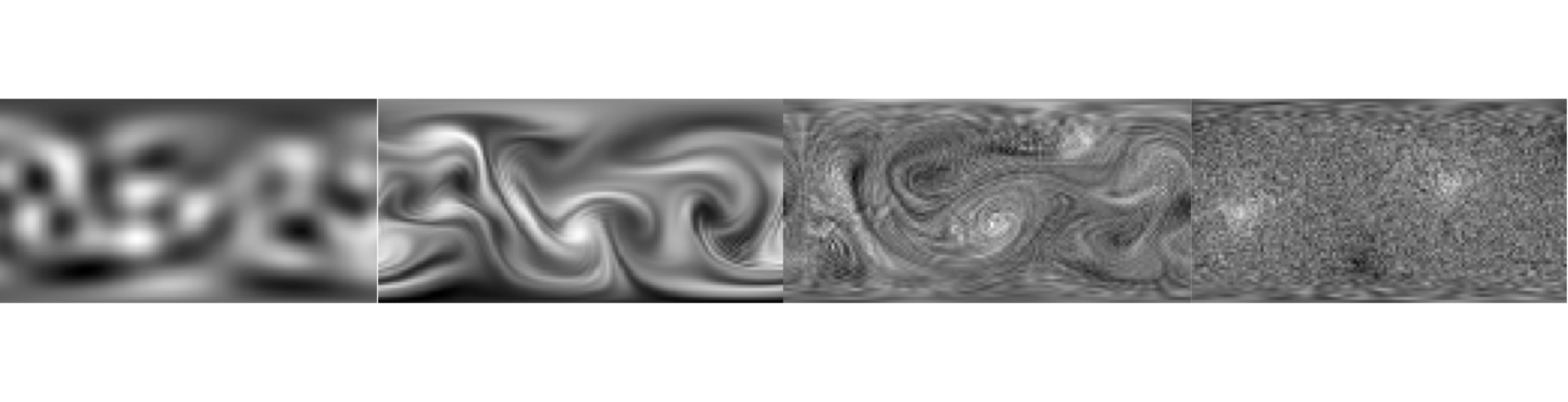
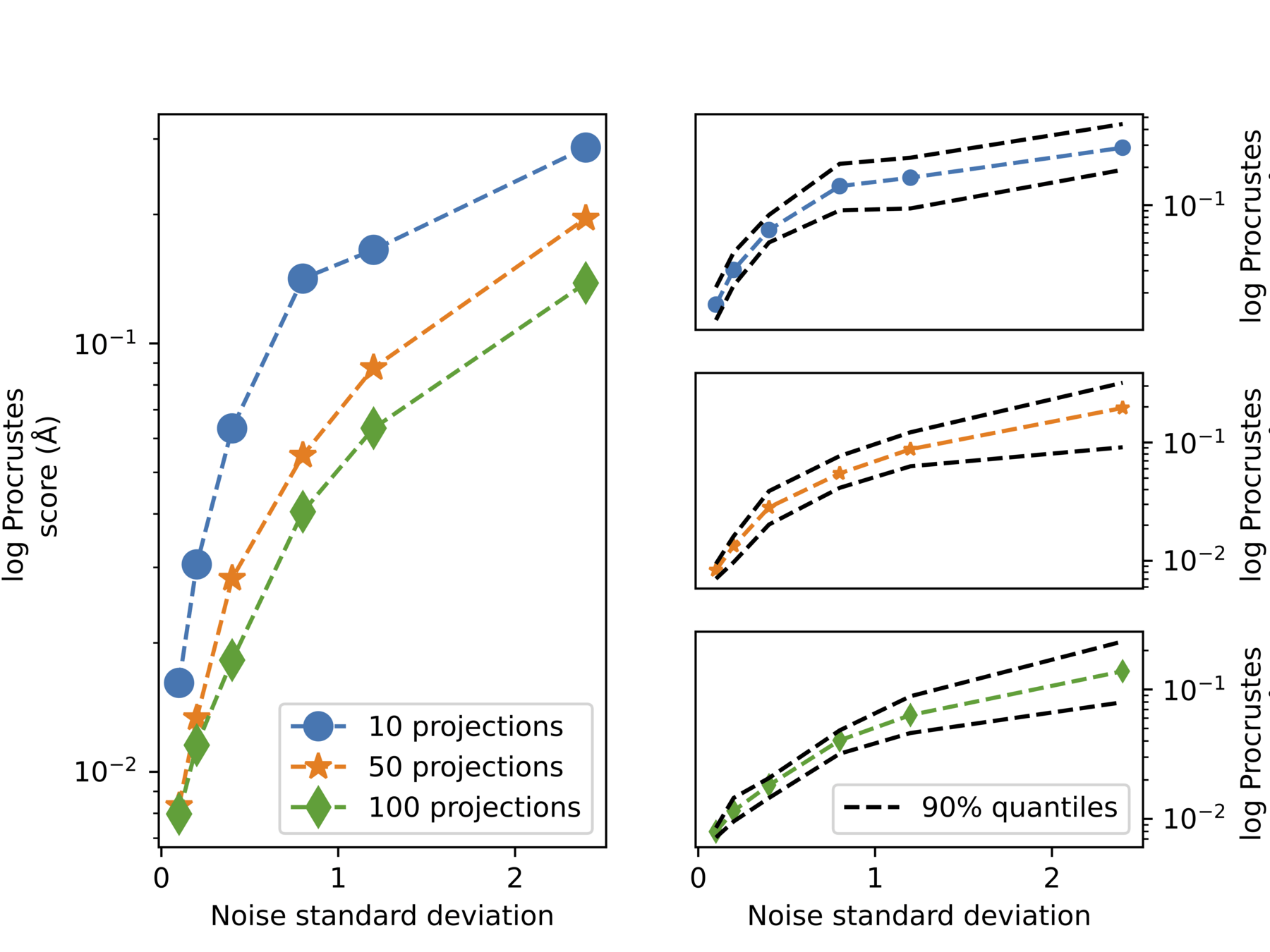
Increase noise
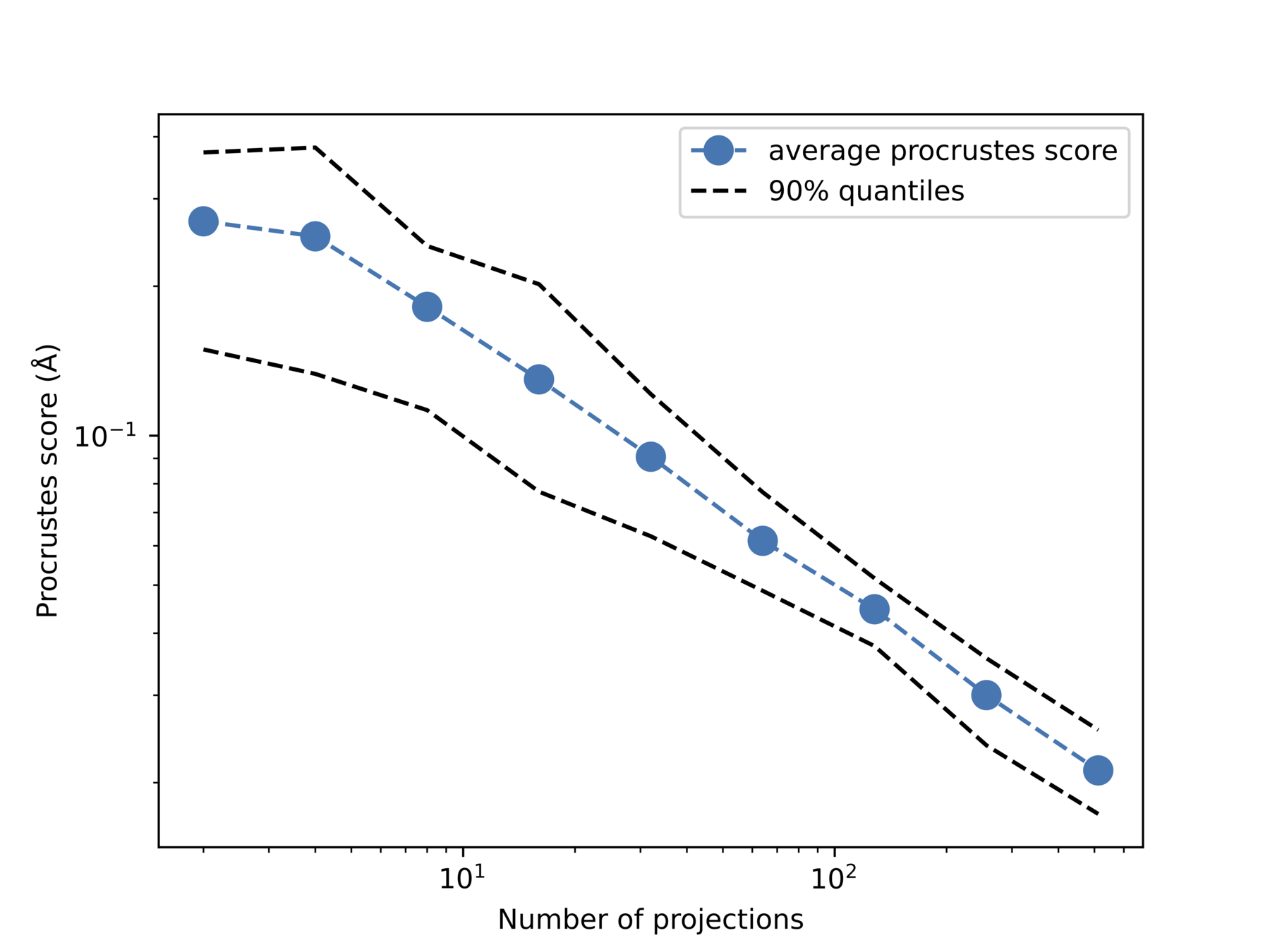
Increase #projections
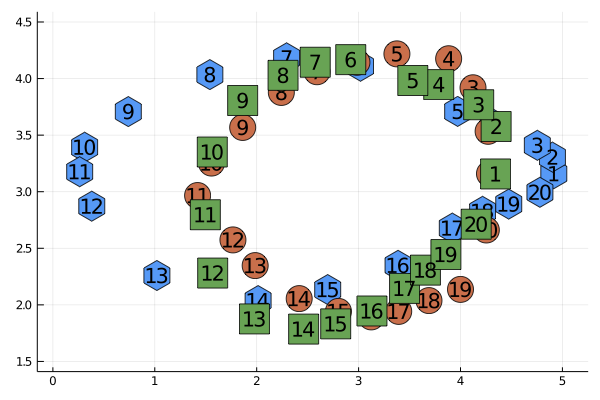
Quantative measure: Procrustes score
Two point clouds \(\mathbf x = (x_i)_{i=1}^K\) and \(\mathbf y = (y_i)_{i=1}^K\)
Rotate, reflect, scale and translate ("superimpose") \(\mathbf x\) to be as close in mean-square sense to \(\mathbf y\) as possible
As close as we can get: Procrustes distance (early statistical shape analysis measure)
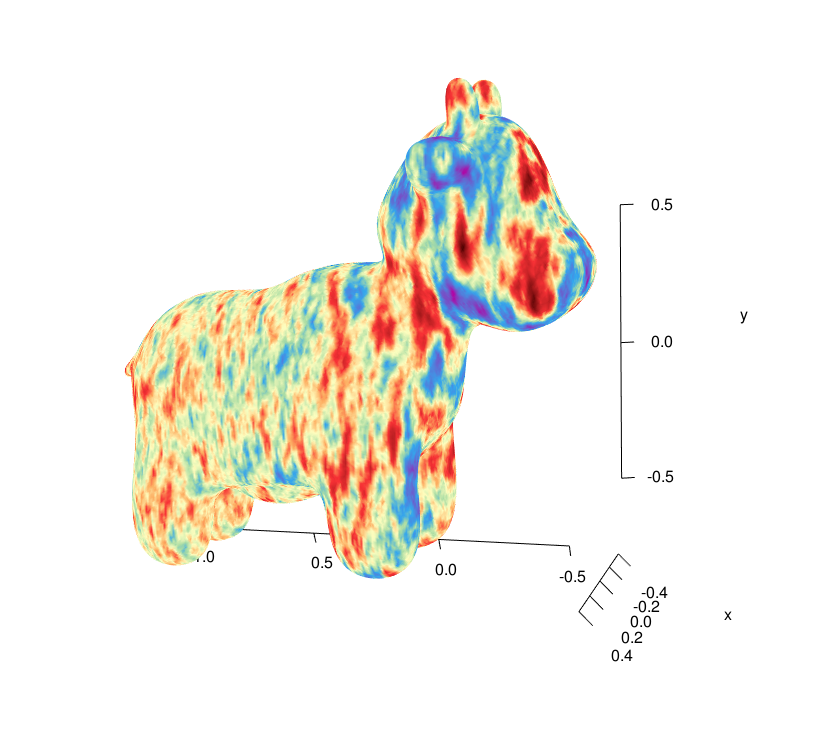
Elliptic SPDEs on manifolds
for sampling of random fields
Shape analysis and matching problems
Shapes analysis gives a way to compute diffeomorphisms!
Question: Can learning deformations of random fields be seen as an indirect matching problem?
Modern ML-based methods allows for the learning of \(\gamma\) with guarantees!
Question: What is a good matching functional to compare your deformed model to observational data?
Question: What is suitable data?
By Erik Jansson




