


Erik Jansson
WASP and KAW postdoctoral fellow in the Cambridge Image Analysis Group and CRA at Wolfson College.
Joint work with Klas Modin
Fully-connected equal layers
with a fixed final node
Skip connection \(\implies \) Explicit Euler
Infinite number of layers \(\implies\)
Time-continuous optimal control problem
Skip connection \(\implies \) Explicit Euler
Evolve points along a time-dependent vector field!
Penalize missing targets:
Penalize weird vector fields:
Key question: How does \(v\) evolve in time?
Trajectory of \(m_t\) does not care about matching!
Cannonball does not care about target
Use the Lagrangian \({\int_0^T \int_M Lv(t) \cdot v(t)\mathrm{d}x\mathrm{d}t}_{}\)
Calculus of variations gives:
In usual LM, all vector fields are available
Idea: Constrain set of vector fields
Sub-Riemannian landmark matching!
\(\mathcal{S}\)
\(v = F(u)(x)\)
\(\mathfrak{X}(M)\)
\(F(u)\)
\(\mathcal{U}\)
\(u\)
Lagrangian becomes \({\int_0^T \int_M LF(u(t)) \cdot F(u(t))\mathrm{d}x\mathrm{d}t}_{}\)
Points evolve by \(\dot y_i = F(u(t))(y_i)\)
How to find dynamics of \(u\)?
Idea: Apply chain rule to \(\dot m = \operatorname{ad}_v^T m\)
\(\mathcal{S}\)
\(v = F(u)(x)\)
\(\mathfrak{X}(M)\)
\(F(u)\)
\(\mathcal{U}\)
\(u\)
Simplification of geometry!
"Adjust initial conditions until target is hit"
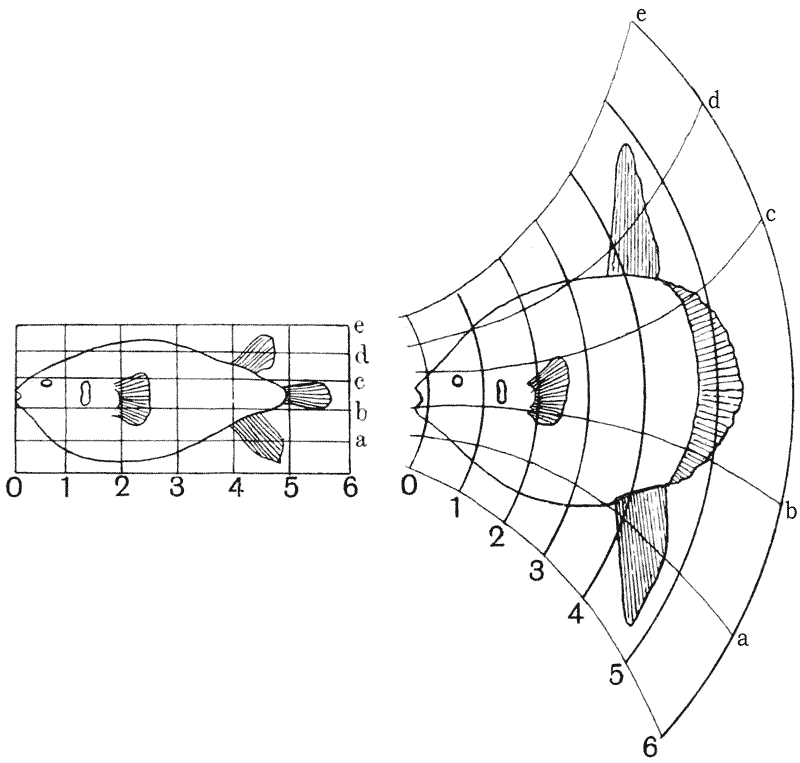
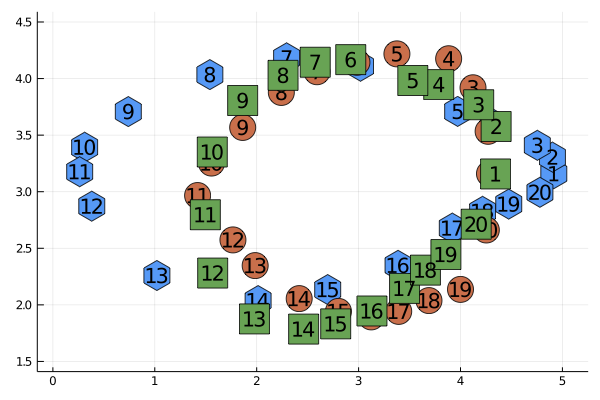
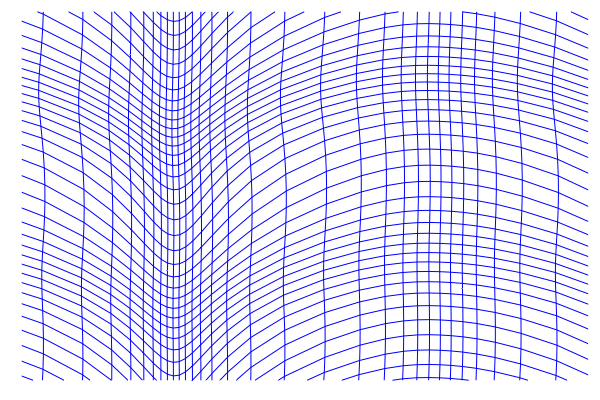
Goal: Move landmarks from one fish to the other
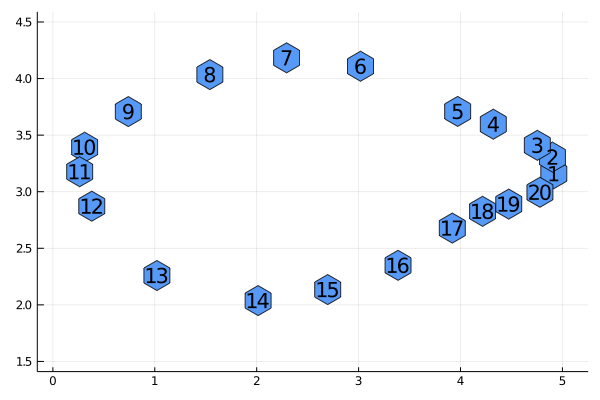
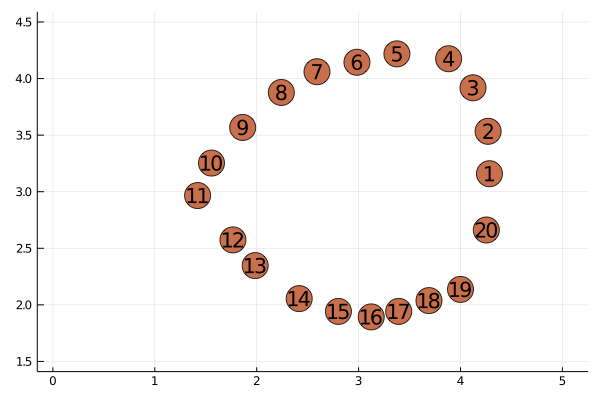
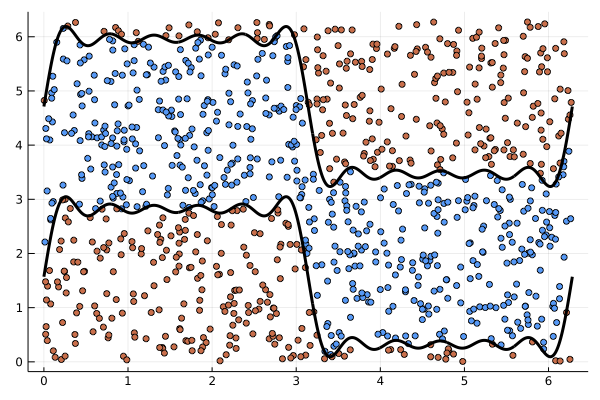
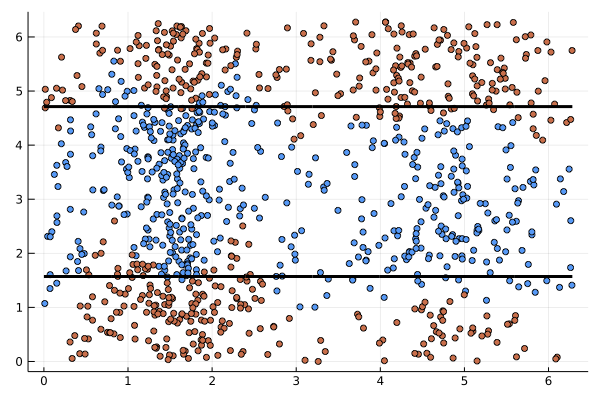
Goal: Move landmarks on torus to \([0,1]\)
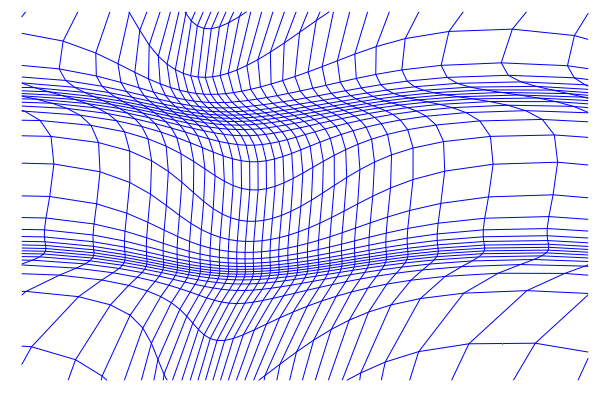
Projection
Badly behaved transformation!
Increase regularization strength?
When matching landmarks, points are moved by a vector field parametrized by some control variable.
A neural networks moves points along a vector field determined by weights and biases.
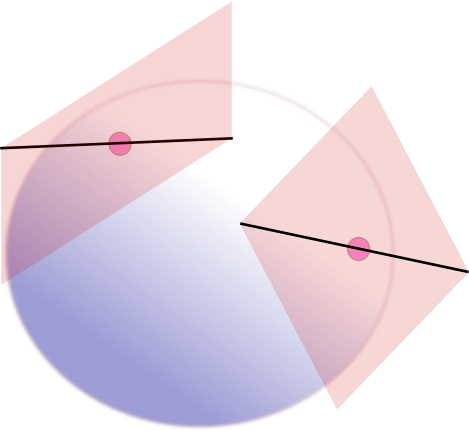
Available vector fields:
Iterated Lie brackets
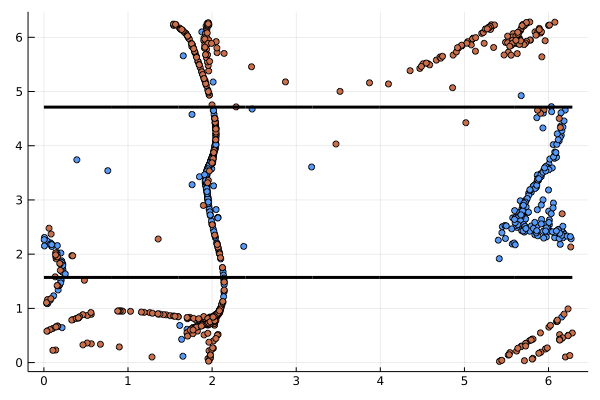
If distribution is integrable, we
move only along blue line
To have reachability, we must destroy integrability
\(\implies\) Nonlinearity!
Move from
to
By Erik Jansson




