




Daniel Haehn PRO
Hi, I am a biomedical imaging and visualization researcher who investigates how computational methods can accelerate biological and medical research.
Assignment 6
A
Robot = function(x, y, z) {
// create head, neck, and torso
var fromhelper = HELPER.cylinderSkeletonMesh(3, 5, 'blue')
var geometry = fromhelper[0];
var material = fromhelper[1];
var bones = fromhelper[2];
var mesh = new THREE.SkinnedMesh( geometry, material );
var skeleton = new THREE.Skeleton( bones );
mesh.add( bones[0] );
mesh.bind( skeleton );
this.root = bones[ 0 ]; // invisible anchor point
this.root.position.set( x, y, z );
this.head = bones[ 1 ];
this.neck = bones[ 2 ];
this.neck.position.y = -10;
this.torso = bones[ 3 ];
this.torso.position.y = -30;
this.body_mesh = mesh;
// this.head = new THREE.Bone();
// this.head.position.set( x, y, z );
// this.neck = new THREE.Bone();
// this.neck.position.y = -10;
// this.head.add(this.neck);
// this.torso = new THREE.Bone();
// this.torso.position.y = -30;
// this.neck.add(this.torso);
// create left upper arm, lower arm, and hand
var fromhelper = HELPER.cylinderSkeletonMesh(3, 5, 'blue')
var geometry = fromhelper[0];
var material = fromhelper[1];
var bones = fromhelper[2];
var mesh = new THREE.SkinnedMesh( geometry, material );
var skeleton = new THREE.Skeleton( bones );
mesh.add( bones[0] );
mesh.bind( skeleton );
// this.root = bones[ 0 ]; // invisible anchor point
// this.root.position.set( x, y, z );
this.neck.add(this.left_upperarm);
this.left_upperarm = bones[ 1 ];
this.left_upperarm.position.y = -5;
this.left_upperarm.position.x = 5;
this.left_lowerarm = bones[ 2 ];
this.left_lowerarm.position.y = -15;
this.left_lowerarm.position.x = 5;
this.left_hand = bones[ 3 ];
this.left_hand.position.x = 5;
this.left_hand.position.y = -5;
this.leftarm_mesh = mesh;
// this.left_upperarm = new THREE.Bone();
// this.left_upperarm.position.y = -5;
// this.left_upperarm.position.x = 5;
// this.left_lowerarm = new THREE.Bone();
// this.left_lowerarm.position.y = -15;
// this.left_lowerarm.position.x = 5;
// this.left_hand = new THREE.Bone();
// this.left_hand.position.x = 5;
// this.left_hand.position.y = -5;
// this.neck.add(this.left_upperarm);
// this.left_upperarm.add(this.left_lowerarm)
// this.left_lowerarm.add(this.left_hand);
this.left_upperleg = new THREE.Bone();
this.left_upperleg.position.x = 5;
this.left_upperleg.position.y = -5;
this.left_lowerleg = new THREE.Bone();
this.left_lowerleg.position.x = 5;
this.left_lowerleg.position.y = -15;
this.left_foot = new THREE.Bone();
this.left_foot.position.x = 5;
this.left_foot.position.y = -5;
this.torso.add(this.left_upperleg);
this.left_upperleg.add(this.left_lowerleg)
this.left_lowerleg.add(this.left_foot);
this.right_upperarm = new THREE.Bone();
this.right_upperarm.position.y = -5;
this.right_upperarm.position.x = -5;
this.right_lowerarm = new THREE.Bone();
this.right_lowerarm.position.y = -15;
this.right_lowerarm.position.x = -5;
this.right_hand = new THREE.Bone();
this.right_hand.position.x = -5;
this.right_hand.position.y = -5;
this.neck.add(this.right_upperarm);
this.right_upperarm.add(this.right_lowerarm)
this.right_lowerarm.add(this.right_hand);
this.right_upperleg = new THREE.Bone();
this.right_upperleg.position.x = -5;
this.right_upperleg.position.y = -5;
this.right_lowerleg = new THREE.Bone();
this.right_lowerleg.position.x = -5;
this.right_lowerleg.position.y = -15;
this.right_foot = new THREE.Bone();
this.right_foot.position.x = -5;
this.right_foot.position.y = -5;
this.torso.add(this.right_upperleg);
this.right_upperleg.add(this.right_lowerleg)
this.right_lowerleg.add(this.right_foot);
this.movement = null;
};
Robot.prototype.show = function(scene) {
scene.add( this.body_mesh );
scene.add( this.leftarm_mesh );
// var rGroup = new THREE.Group();
// rGroup.add( this.head );
// var helper = new THREE.SkeletonHelper( rGroup );
// helper.material.linewidth = 3;
// scene.add(rGroup);
// scene.add(helper);
};
Robot.prototype.raise_left_arm = function() {
this.movement = 'raise left arm';
};
Robot.prototype.lower_left_arm = function() {
this.movement = 'lower left arm';
};
Robot.prototype.kick = function() {
this.movement = 'kick';
};
Robot.prototype.dance = function() {
this.movement = 'dance';
};
Robot.prototype.onAnimate = function() {
if (this.movement == 'raise left arm') {
var T = Math.PI;
this.left_upperarm.quaternion.slerp( new THREE.Quaternion(Math.sin(-T/2), // w
0, // x
0, // y
Math.cos(-T/2)), // z
0.1 );
} else if (this.movement == 'lower left arm') {
this.left_upperarm.quaternion.slerp( new THREE.Quaternion(0, 0, 0, 1),
0.1 );
} else if (this.movement == 'kick') {
// check if slerp reached almost the end
if (this.right_upperleg.quaternion.w < 0.72) {
// signal that the kick is done and the leg should move back
this.movement = 'kick done';
} else {
var T = -Math.PI/2;
this.right_upperleg.quaternion.slerp( new THREE.Quaternion( Math.sin( T / 2 ), // x
0, // y
0, // z
Math.cos( T / 2 ) ), // w
0.1 );
}
} else if (this.movement == 'kick done') {
// reset leg back to identity
this.right_upperleg.quaternion.slerp( new THREE.Quaternion(0,0,0,1), 0.1 );
} else if (this.movement == 'dance') {
if (typeof this.dancer === 'undefined') {
this.dancer = setInterval(function() {
//
// some random translation
//
var shakehead = 3*Math.random();
if (Math.random() < .5) {
shakehead *= -1;
}
var shakeneck = 3*Math.random();
if (Math.random() < .5) {
shakeneck *= -1;
}
var shaketorso = 3*Math.random();
if (Math.random() < .5) {
shaketorso *= -1;
}
this.head.position.x += shakehead;
this.neck.position.x += shakeneck;
this.torso.position.x += shaketorso;
//
// use actions
//
if (Math.random() < .3) {
this.raise_left_arm();
}
if (Math.random() < .3) {
this.lower_left_arm();
}
if (Math.random() < .3) {
this.kick();
}
if (Math.random() < .3) {
this.movement = 'kick done';
}
}.bind(this), 500);
}
}
};Assignment 7
Due 11/11
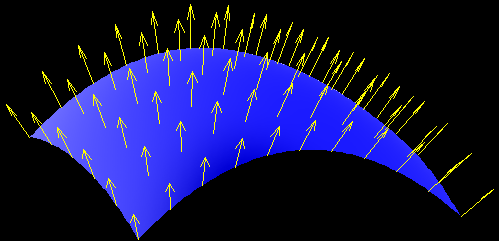
usually between 0 and 1 for x,y,z
usually point away from the outside of a surface
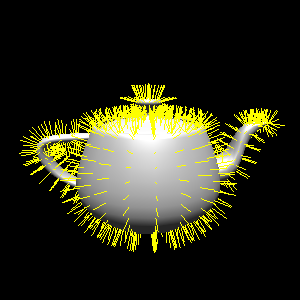
Normals
used for Material
used for Lighting
used for Shading
Normals
V1
V2
V3
V4
V6
V5
(x, y, z)
(x, y, z)
(x, y, z)
(x, y, z)
(x, y, z)
(x, y, z)
Vertex
/ Vertices
Face
Face
N1 (x, y, z)
N2 (x, y, z)
Face
Normals
V1
V2
V3
V4
V6
V5
(x, y, z)
(x, y, z)
(x, y, z)
(x, y, z)
(x, y, z)
(x, y, z)
Vertex
/ Vertices
Face
Face
N1 (x, y, z)
N2 (x, y, z)
Vertex
N3 (x, y, z)
N6 (x, y, z)
N5 (x, y, z)
N4 (x, y, z)
No Shading
Normals
used for Material
used for Lighting
No Normals
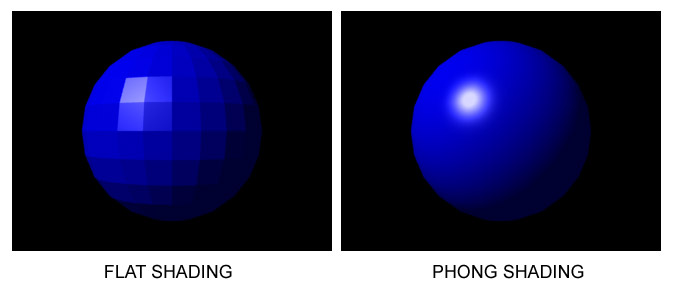
Face Normals
Vertex Normals
V1
V2
V3
Bump Map
Normals
Pixel
var geometry = new THREE.BoxBufferGeometry( 20, 20, 20);
var material = new THREE.MeshStandardMaterial({ color: 0xffffff });
var mesh = new THREE.Mesh( geometry, material);Mesh File Formats
GLTF
.gltf
.glb
STL
OBJ
PLY
Collada
.dae
.stl
.ply
.obj
And more:
Stereo Lithography (STL)
solid SOMENAME
facet normal 1 0 0
outer loop
vertex 0 0 1
vertex 1 0 0
vertex 0 1 0
endloop
endfacet
facet normal 1 0 0
outer loop
vertex 0 0 1
vertex 1 1 0
vertex 1 1 1
endloop
endfacet
...
endsolidFace 1
Face 2
Stanford Polygon File (PLY)
ply
format ascii 1.0
comment i love cs460
element vertex 4
property float x
property float y
property float z
element face 3
property list uchar int vertex_index
end_header
0 0 0
0 0 1
0 1 1
0 1 0
3 0 1 2
3 1 2 3
3 1 2 4Vertices
Faces
Header
Wavefront Object (OBJ)
Vertices
Faces
v -0.5 -0.5 0.5
v 0.5 -0.5 0.5
v -0.5 0.5 0.5
v 0.5 0.5 0.5
v -0.5 0.5 -0.5
v 0.5 0.5 -0.5
v -0.5 -0.5 -0.5
v 0.5 -0.5 -0.5
f 1 2 4
f 1 4 3
f 3 4 6
f 3 6 5
f 5 6 8
f 5 8 7
f 7 8 2
f 7 2 1
f 2 8 6
f 2 6 4
f 7 1 3
f 7 3 8
f 7 3 5Let's make an OBJ file
What about Three.js?
By Daniel Haehn
Slides for CS460 Computer Graphics at UMass Boston. See https://cs460.orghttps://cs460.org



