COMP2521
Data Structures & Algorithms
Week 7.4
Shortest Path
Author: Hayden Smith 2021
In this lecture
Why?
- Finding the shortest path through a graph is one of the most common use cases
What?
- Shortest Path
- Edge Relaxation
- Dijkstra's Algorithm
Shortest Path
We're going to search for the shortest path between two vertices on a weighted graph with non-negative weights.
....Pretty much just a BFS with weighted edges....
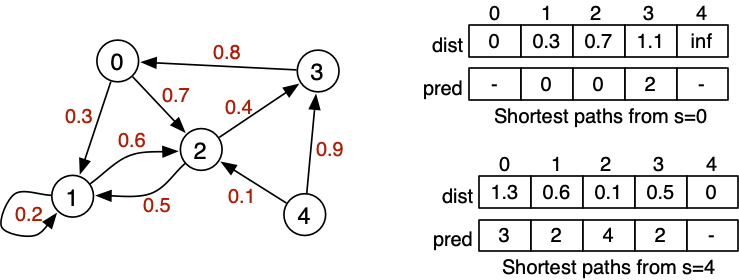
Shortest Path
Shortest paths from s to all other vertices:
- dist[] V-indexed array of cost of shortest path from s
- pred[] V-indexed array of predecessor in shortest path from s
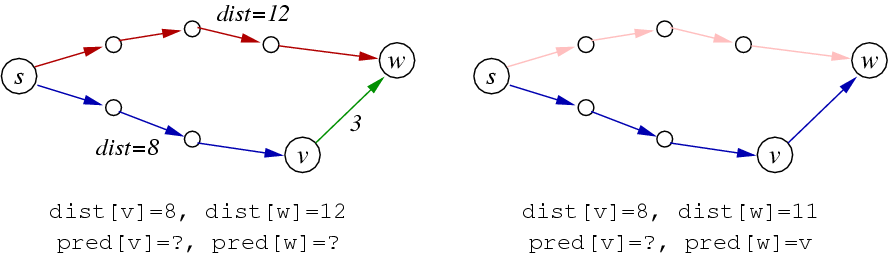
Edge Relaxation
Edge relaxation occurs whilst we are exploring a graph for the shortest path. This is because dist[] and pred[] show the shortest path so far.
If we have:
- dist[v] is length of shortest known path from s to v
- dist[w] is length of shortest known path from s to w
- edge (v,w,weight)
Relaxation updates data for w if we find a shorter path from s to w :
- if dist[v] + weight < dist[w] then
update dist[w]←dist[v]+weight and pred[w]←v
Edge Relaxation
Dijkstra's Algorithm
dijkstraSSSP(G,source):
dist[] // array of cost of shortest path from s
pred[] // array of predecessor in shortest path from s
vSet // vertices whose shortest path from s is unknown
initialise all dist[] to ∞
dist[source]=0
initialise all pred[] to -1
vSet = all vertices of G
while vSet is not empty:
find v in vSet with minimum dist[v]
for each (v,w,weight) in edges(G):
relax along (v,w,weight)
vSet = vSet \ {v}
Dijkstra's Algorithm
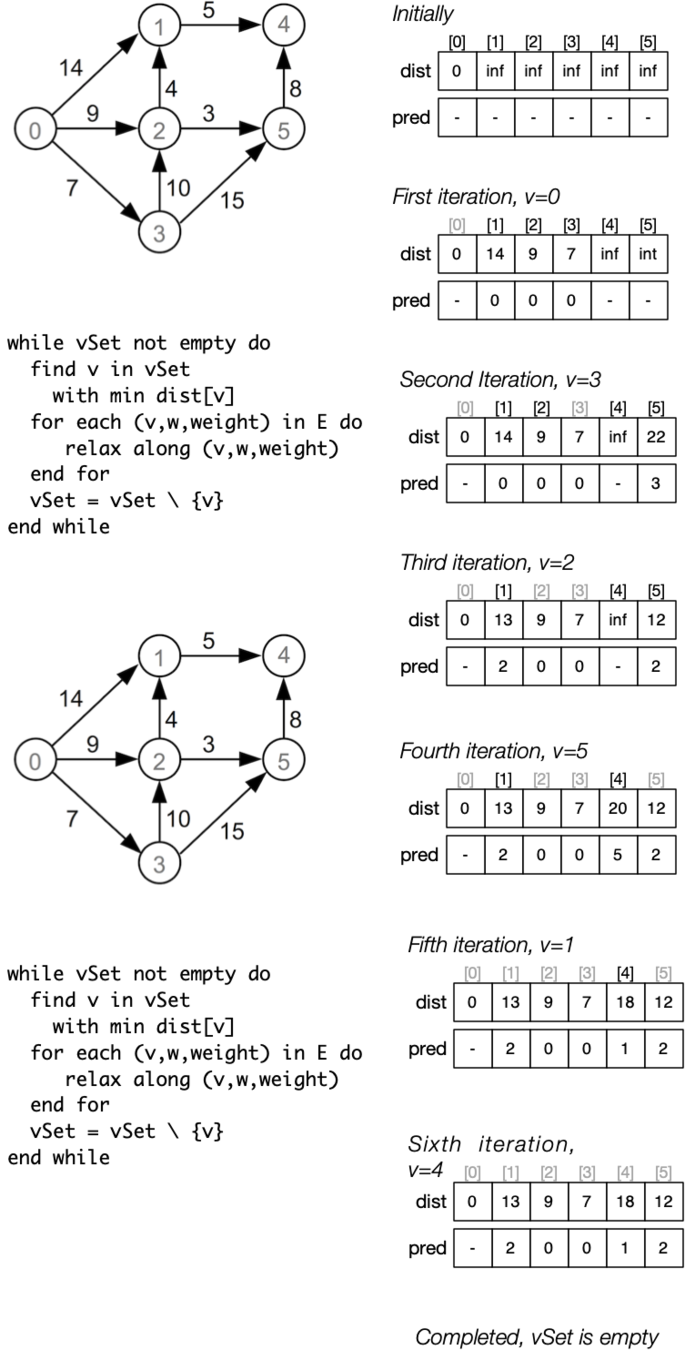
Dijkstra's Algorithm
Time Complexity
Each edge needs to be considered once ⇒ O(E).
Outer loop has O(V) iterations.
Implementing "find s ∈ vSet with minimum dist[s]"
- try all s in vSet ⇒ cost = O(V) ⇒ overall cost = O(E + V^2) = O(V^2)
- using a priority queue to implement extracting minimum... can improve overall cost to O(E + V·log V)
Feedback
COMP2521 21T2 - 7.4 - Shortest Path
By haydensmith



