

Hugo Hadfield
Cambridge University PhD student, Signal Processing and Communications Laboratory
Hugo Hadfield, Joan Lasenby
University Of Cambridge,
Signal Processing and Communications Laboratory
Speaker: Hugo Hadfield
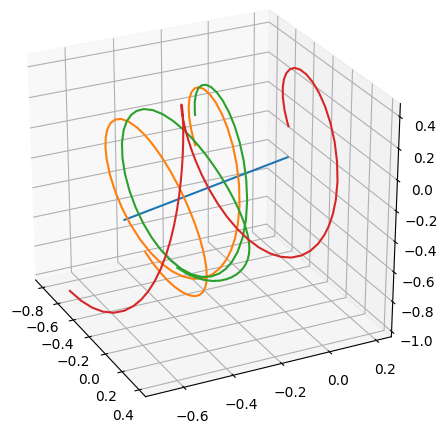
force magnitude
force direction
3d point through which the line passes
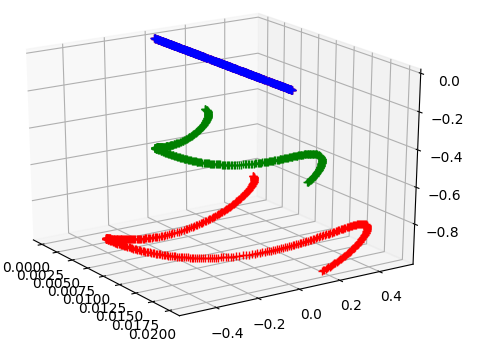
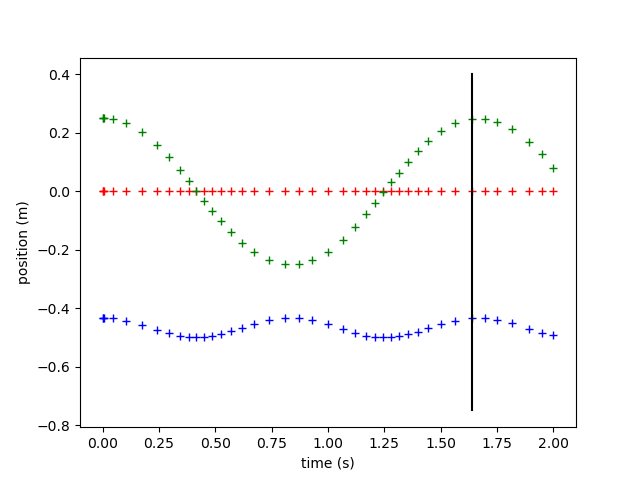
Closed form predicted time period
By Hugo Hadfield
This presentation covers a formulation of constrained rigid body dynamics via a specific embedding of screw theory into conformal geometric algebra. For more information see the secon half of Hugo Hadfield's PhD thesis, specifically the section titled "KINEMATICS, DYNAMICS AND ROBOTICS". Full text of the thesis can be found here: https://hh409.user.srcf.net/thesis/thesis.html




