

Hugo Hadfield
Cambridge University PhD student, Signal Processing and Communications Laboratory
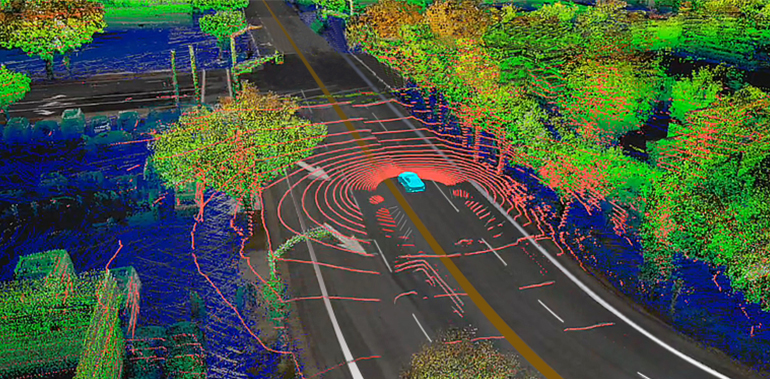
Several high definition cameras
Automotive RADAR
Speed and steering sensors
LIDAR system
GPS and IMU/INS
Minimise \(C\) with respect to \(\Phi_i\) and \(Y_j\)
Minimise \(C\) with respect to \(\Phi_i\) and \(Y_j\)
This is a Convex Optimisation Problem
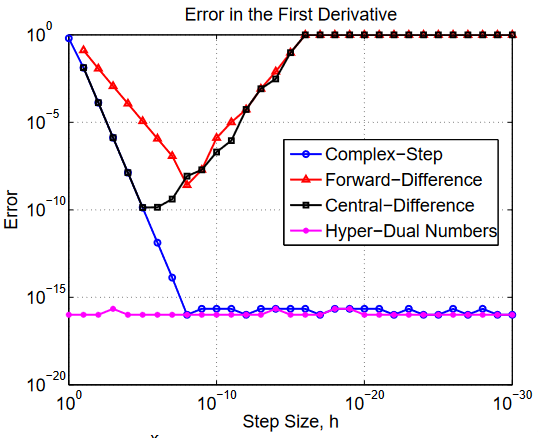
For derivatives we can simply construct the clifford algebra over the complex numbers or over the dual numbers!
We can calculate automatic derivatives through complex/dual number autodiff
See the work of Jeffrey Fike:
If we take our collection of cameras on a drive they can repeatedly do bundle adjustments and build up a 3D map of the world!
We could even use multiple frames from a single camera moving through space
Given a noisey sequence of measurements of the positions of a moving car how do you estimate its position at any point in time?
Describe each position with a rotor
Convex optimisation, minimising difference between position and measurment and function of the path
Describe the state of the car at a point in time with a vector
We include, combined position and rotation: \(\Phi\)
Combined linear and angular velocity: \(\Psi\)
Design a function that takes a given state and advances it one time step. Use this motion model to propogate uncertainty about the state of the car:
This is the basic setup required for an (extended/unscented) Kalman Filter
Set up a state like this:
Set up a process function (Cayley kinematic equation):
Set up a measurement function:
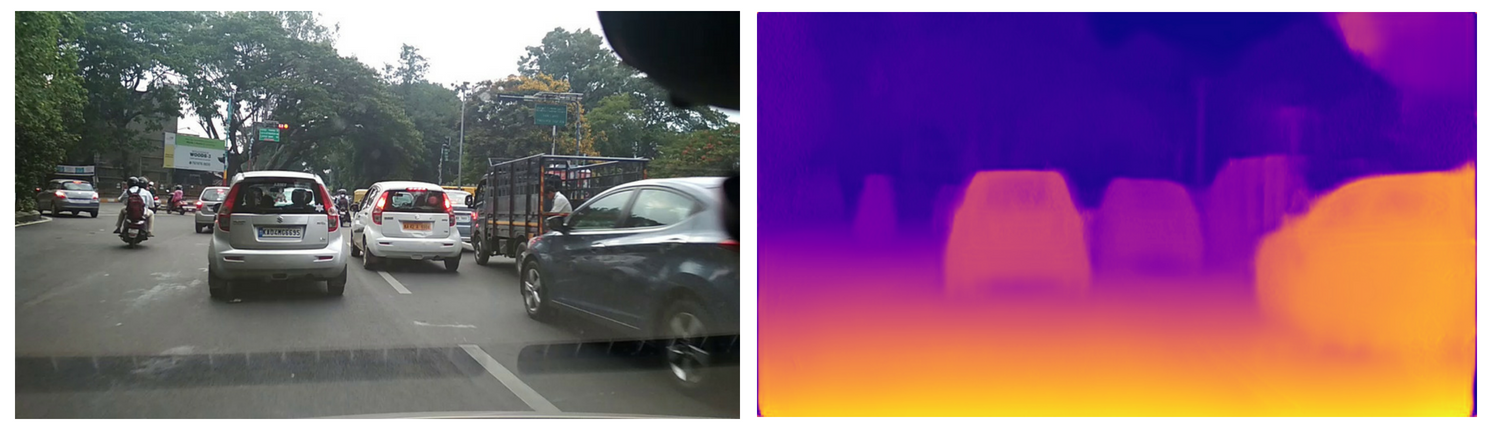
Given a depth image of the road, reject outliers and fit a plane
Monodepth machine learning models generate depth maps
force magnitude
force direction
3d point through which the line passes
By Hugo Hadfield
A presentation on applications of Geometric Algebra and self-driving car technology. For more technical content check out my website http://hh409.user.srcf.net




