Video from:
Kehrle, F., et. al. (2011), Optimal control of formula 1 race cars in a VDrift based virtual environment
Real-Time Iterations and Multi-Level Iterations
Ihno Schrot
MORFAE Workshop at TU Clausthal on September 21, 2023
OUTLINE
1
Optimal Control Problem Formulation and Nonlinear Model Predictive Control
2
Problem Discretization using Direct Multiple Shooting
3
The Sequential Quadratic Programming Method as Solution Method for the Nonlinear Programs
4
Real - Time Iterations
5
Multi - Level Iterations
1
Optimal Control Problem Formulation and Nonlinear Model Predictive Control
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
& 0 = g\left(x(t),u(t),p\right),&& t\in[0,T],\\
& 0 \leq h\left(x(t),u(t),p\right),&& t\in[0,T],\\
\end{aligned}
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{0}^{T} L\left(x(t),u(t),p\right) \ud t +
E\left(x(T)\right)\\
\text{s.\,t. } &
\end{aligned}
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
& \dot{x}(t) = f\left(x(t),u(t),p\right),&& t\in[0,T],\\
& x(0) = x_0,&&\\
\end{aligned}
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
& 0 = r^{\mathrm{e}} \left(x(T)\right),&&\\
& 0 \leq r^{\mathrm{i}} \left(x(T)\right)&&
\end{aligned}
Objective Function
Dynamical System
Continuous Constraints
Terminal Constraints
State $$x$$
Control $$u$$
Parameter $$p$$
x(t)
\dot{x}(t)
x(0)
u(t)
u(t)
p
1. OCP AND NMPC
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{0}^{T} L\left(x(t),u(t),p\right) \ud t +
&&E\left(x(T)\right)\\
\text{s.\,t. }
\end{aligned}
1. OCP AND NMPC
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{\textcolor{#fca311}{x(\cdot)},u(\cdot)}~ & \int_{0}^{T} L\left(\textcolor{#fca311}{x(t)},u(t),p\right) \ud t +
&&E\left(x(T)\right)\\
\text{s.\,t. }
\end{aligned}
\(x\): States
1. OCP AND NMPC
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),\textcolor{#fca311}{u(\cdot)}}~ & \int_{0}^{T} L\left(x(t),\textcolor{#fca311}{u(t)},p\right) \ud t +
&&E\left(x(T)\right)\\
\text{s.\,t. }
\end{aligned}
1. OCP AND NMPC
\(x\): States
\(u\): Controls
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{0}^{T} L\left(x(t),u(t),\textcolor{#fca311}{p}\right) \ud t +
&&E\left(x(T)\right)\\
\text{s.\,t. }
\end{aligned}
1. OCP AND NMPC
\(x\): States
\(u\): Controls
\(p\): Parameters
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{0}^{T} L\left(x(t),u(t),p\right) \ud t +
&&E\left(x(T)\right)\\
\text{s.\,t. } & \dot{x}(t) = f\left(x(t),u(t),p\right),&& t\in[0,T],\\
& x(0) = x_0,&&\\
\end{aligned}
1. OCP AND NMPC
\(x\): States
\(u\): Controls
\(p\): Parameters
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{0}^{T} L\left(x(t),u(t),p\right) \ud t +
&&E\left(x(T)\right)\\
\text{s.\,t. } & \dot{x}(t) = f\left(x(t),u(t),p\right),&& t\in[0,T],\\
& x(0) = x_0,&&\\
& 0 = g\left(x(t),u(t),p\right),&& t\in[0,T],\\
& 0 \leq h\left(x(t),u(t),p\right),&& t\in[0,T],\\
\end{aligned}
1. OCP AND NMPC
\(x\): States
\(u\): Controls
\(p\): Parameters
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{0}^{T} L\left(x(t),u(t),p\right) \ud t +
&&E\left(x(T)\right)\\
\text{s.\,t. } & \dot{x}(t) = f\left(x(t),u(t),p\right),&& t\in[0,T],\\
& x(0) = x_0,&&\\
& 0 = g\left(x(t),u(t),p\right),&& t\in[0,T],\\
& 0 \leq h\left(x(t),u(t),p\right),&& t\in[0,T],\\
& 0 = r^{\mathrm{e}} \left(x(T)\right),&&\\
& 0 \leq r^{\mathrm{i}} \left(x(T)\right)&&
\end{aligned}
1. OCP AND NMPC
\(x\): States
\(u\): Controls
\(p\): Parameters
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
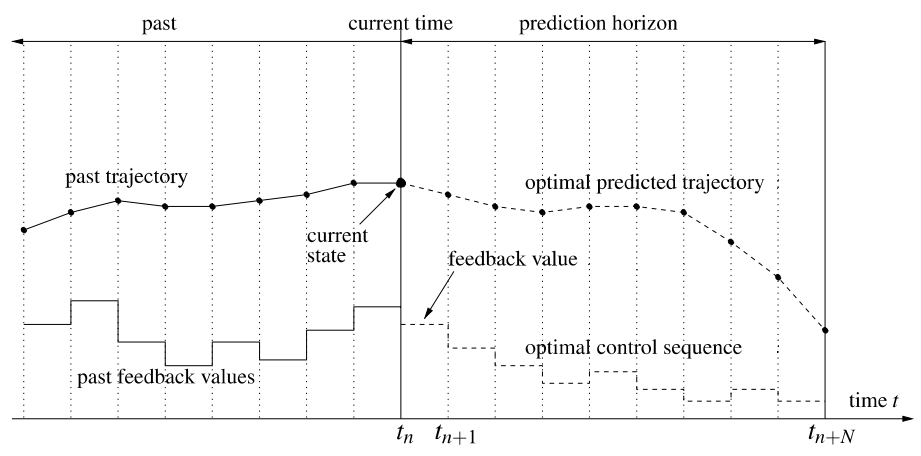
t_k
t_k~~ + T
1. Measure current state $$x_k$$
Repeat:
Illustration based on Grüne and Pannek, Nonlinear Model Predictive Control
1. OCP AND NMPC
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
t_k
t_k~~ + T
2. Solve OCP for horizon $$[t_k,t_k+T]$$
1. Measure current state $$x_k$$
Repeat:
Illustration based on Grüne and Pannek, Nonlinear Model Predictive Control
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{\textcolor{#FCA311}{t_k}}^{\textcolor{#FCA311}{t_k+T}} L\left(x(t),u(t),p\right) \ud t && +
E\left(x(\textcolor{#FCA311}{t_k+T})\right)\\
\text{s.\,t. } & \dot{x}(t) = f\left(x(t),u(t),p\right),&& t\in[\textcolor{#FCA311}{t_k,t_k+T}],\\
& x(\textcolor{#FCA311}{t_k}) = \textcolor{#FCA311}{x_k},&&\\
& 0 = g\left(x(t),u(t),p\right),&& t\in[\textcolor{#FCA311}{t_k,t_k+T}],\\
& 0 \leq h\left(x(t),u(t),p\right),&& t\in[\textcolor{#FCA311}{t_k,t_k+T}],\\
& 0 = r^{\mathrm{e}} \left(x(\textcolor{#FCA311}{t_k+T})\right),&&\\
& 0 \leq r^{\mathrm{i}} \left(x(\textcolor{#FCA311}{t_k+T})\right)&&
\end{aligned}
1. OCP AND NMPC
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
t_k
t_k~~ + T
2. Solve OCP for horizon $$[t_k,t_k+T]$$
1. Measure current state $$x_k$$
3. Apply first part of computed contol
Repeat:
Illustration based on Grüne and Pannek, Nonlinear Model Predictive Control
1. OCP AND NMPC
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
t_k
t_k~~ + T
2. Solve OCP for horizon $$[t_k,t_k+T]$$
1. Measure current state $$x_k$$
3. Apply first part of computed contol
4. Progress to time $$t_{k+1}$$
t_{k+1}
t_{k+1}
Repeat:
Illustration based on Grüne and Pannek, Nonlinear Model Predictive Control
1. OCP AND NMPC
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
Illustration based on Grüne and Pannek, Nonlinear Model Predictive Control
1. OCP AND NMPC
t_k
t_k~~ + T
2. Solve OCP for horizon $$[t_k,t_k+T]$$
4. Progress to time $$t_{k+1}$$
1. Measure current state \(x_k\)
3. Apply first part of computed contol
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
1. OCP AND NMPC
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{\textcolor{#FCA311}{t_k}}^{\textcolor{#FCA311}{t_k+T}} L\left(x(t),u(t),p\right) \ud t && +
E\left(x(\textcolor{#FCA311}{t_k+T})\right)\\
\text{s.\,t. } & \dot{x}(t) = f\left(x(t),u(t),p\right),&& t\in[\textcolor{#FCA311}{t_k,t_k+T}],\\
& x(\textcolor{#FCA311}{t_k}) = \textcolor{#FCA311}{x_k},&&\\
& 0 = g\left(x(t),u(t),p\right),&& t\in[\textcolor{#FCA311}{t_k,t_k+T}],\\
& 0 \leq h\left(x(t),u(t),p\right),&& t\in[\textcolor{#FCA311}{t_k,t_k+T}],\\
& 0 = r^{\mathrm{e}} \left(x(\textcolor{#FCA311}{t_k+T})\right),&&\\
& 0 \leq r^{\mathrm{i}} \left(x(\textcolor{#FCA311}{t_k+T})\right)&&
\end{aligned}
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
OUTLINE
1
Optimal Control Problem Formulation and Nonlinear Model Predictive Control
2
Problem Discretization using Direct Multiple Shooting
3
The Sequential Quadratic Programming Method as Solution Method for the Nonlinear Programs
4
Real - Time Iterations
5
Multi - Level Iterations
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
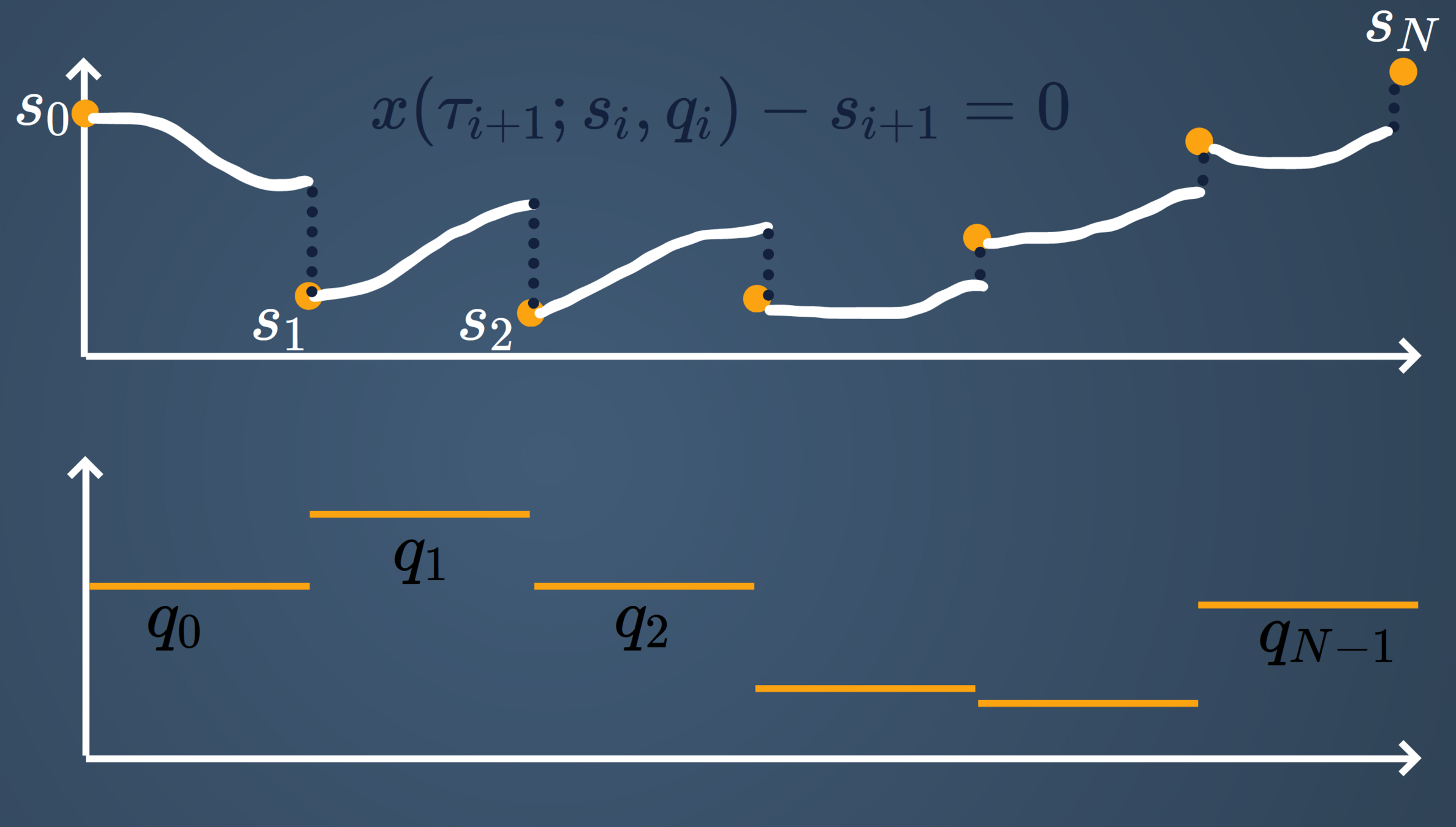
1. Introduce Shooting Grid
State $$x(\cdot)$$
Control $$u(\cdot)$$
2. Replace state trajectory by points
3. Replace control trajectory by, e.g., piecewise constant controls
s_0
s_1
s_2
s_N
q_0
q_1
q_2
q_{N-1}
4. Introduce Matching Conditions
\underbrace{x(\tau_{i+1};s_i,q_i)} - s_{i+1} = 0
Infinite-Dimensional
Bock, H. G., & Plitt, K. J. (1984). A multiple shooting algorithm for direct solution of optimal control problems.
\tau_0
\tau_1
\tau_N
2. MULTIPLE SHOOTING
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
Finite-dimensional nonlinear program
2. MULTIPLE SHOOTING
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{x(\cdot),u(\cdot)}~ & \int_{t_k}^{t_k+T} L\left(x(t),u(t),p\right) \ud t && +
E\left(x(t_k+T)\right)
\end{aligned}
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\min_{\substack{s_0,\ldots,s_N,\\q_0,\ldots,q_N}}~ & \sum_{j=0}^{N} L_j\left(s_j,q_j,p\right) +
E\left(s_N\right) &&
\end{aligned}
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\text{s.\,t. } & \dot{x}(t) = f\left(x(t),u(t),p\right),&& t\in[t_k,t_k+T],\\
& x(t_k) = x_k,&&\\
\end{aligned}
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
& 0 = g\left(x(t),u(t),p\right),&& t\in[t_k,t_k+T],\\
& 0 \leq h\left(x(t),u(t),p\right),&& t\in[t_k,t_k+T],\\
& 0 = r^{\mathrm{e}} \left(x(t_k+T)\right),&&\\
& 0 \leq r^{\mathrm{i}} \left(x(t_k+T)\right)&&
\end{aligned}
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
\text{s.\,t. } & 0 = x(\tau_{j+1};s_j,q_j) - s_{j+1}, && j=0,\ldots,N-1\\
& 0 = x_k - s_0,&&\\
& 0 = q_N - q_{N-1} &&
\end{aligned}
\newcommand{\ud}{\mathrm{d}}
\begin{aligned}
& 0 = g\left(s_j,q_j,p\right), && j=0,\ldots,N,\\
& 0 \leq h\left(s_j,q_j,p\right), && j=0,\ldots,N,\\
& 0 = r^{\mathrm{e}}(s_N),&&\\
& 0 \leq r^{\mathrm{i}}(s_N),&&\\
\end{aligned}
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
OUTLINE
1
Optimal Control Problem Formulation and Nonlinear Model Predictive Control
2
Problem Discretization using Direct Multiple Shooting
3
The Sequential Quadratic Programming Method as Solution Method for the Nonlinear Programs
4
Real - Time Iterations
5
Multi - Level Iterations
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
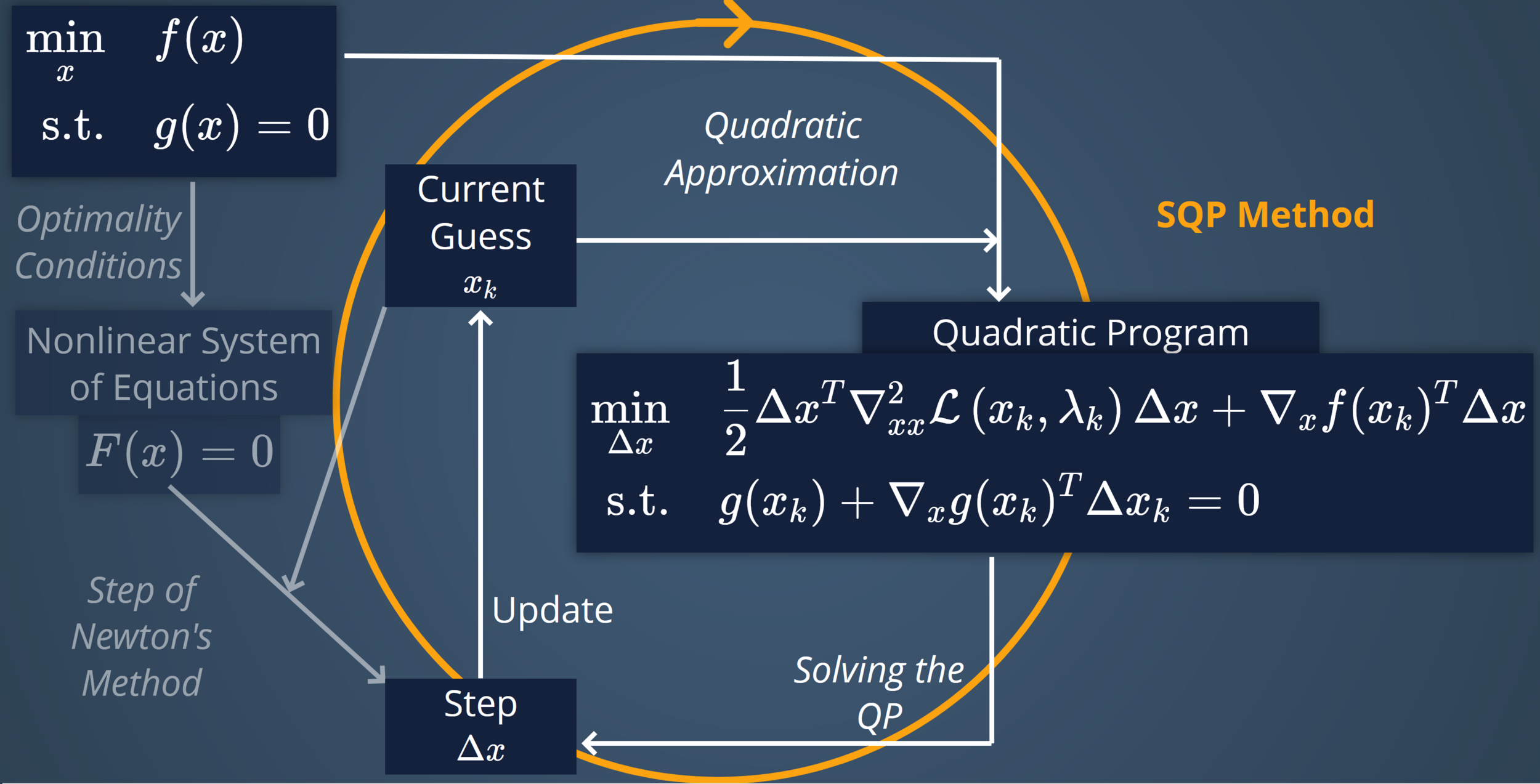
\begin{aligned}
&\min_x & & f(x)\\
& ~~\text{s.t.} & & g(x) = 0
\end{aligned}
F(x)=0
Nonlinear System of Equations
SQP Method
Step of Newton's Method
Optimality Conditions
Quadratic Approximation
Quadratic Program
\begin{aligned}
&\min_{\Delta x} & &\frac{1}{2}\Delta x ^T \nabla_{xx}^2\mathcal{L}\left(x_k,\lambda_k\right)\Delta x + \nabla_x f(x_k)^T\Delta x\\
& ~~\text{s.t.} & & g(x_k) + \nabla_x g(x_k)^T \Delta x_k = 0
\end{aligned}
\text{Lagrangian:}\\
\mathcal{L}(x,\lambda)\coloneqq f(x) - \lambda^T g(x)
Step $$\Delta x$$
Current Guess $$x_k$$
Solving the QP
Update
3. SQP METHOD
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
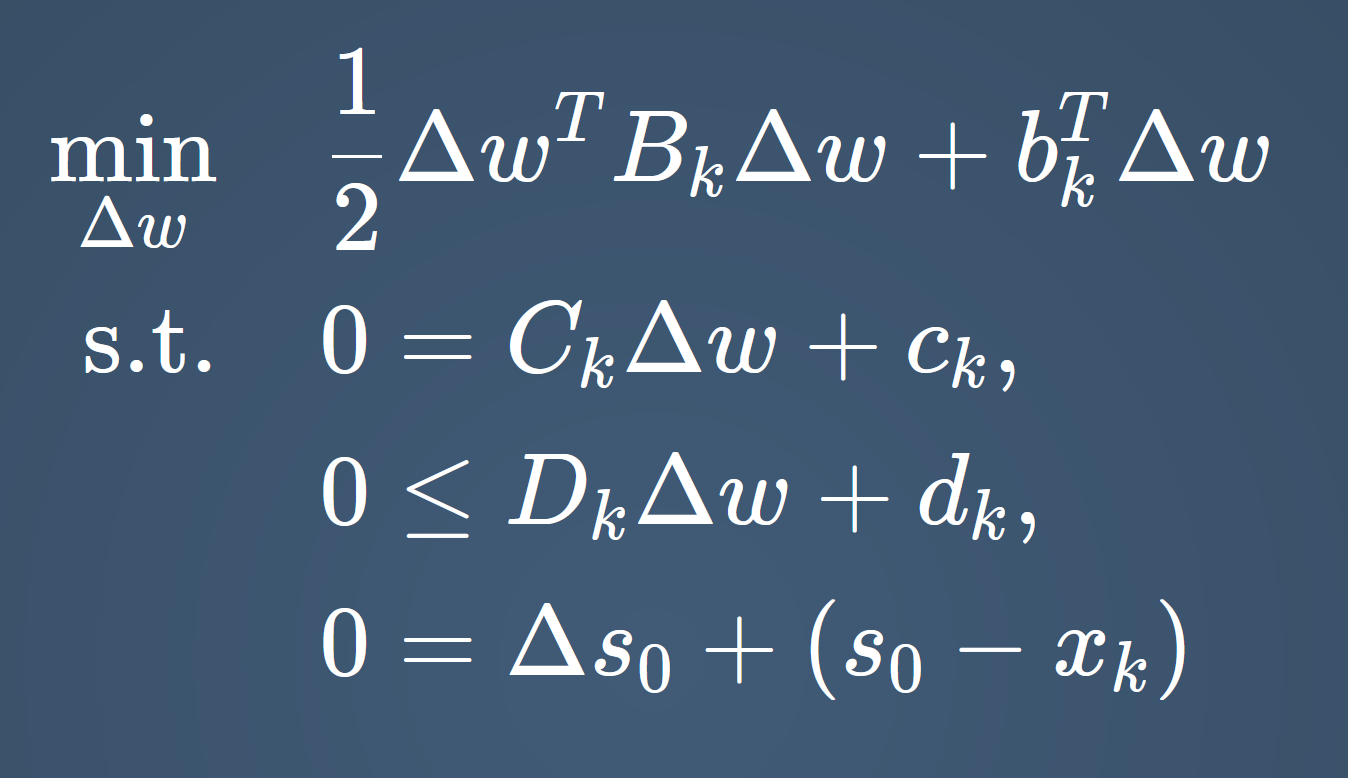
In the case of Multiple Shooting:
- QPs are highly structured
- QPs can be condensed so that they only depend on \(\Delta s_0, \Delta q_0,\ldots,\Delta q_{N-1} \)
\begin{aligned}
&\min_{\textcolor{#FCA311}{\Delta w}} & &\frac{1}{2}\textcolor{#FCA311}{\Delta w} ^T B_k \textcolor{#FCA311}{\Delta w} + b_k ^T \textcolor{#FCA311}{\Delta w}\\
& ~~\text{s.t.} & & 0 = C_k \textcolor{#FCA311}{\Delta w} + c_k,\\
& & & 0 \leq D_k \textcolor{#FCA311}{\Delta w} + d_k,\\
& & & 0 = \textcolor{#FCA311}{\Delta s_0} + (s_0-x_k)
\end{aligned}
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T \textcolor{#FCA311}{B_k} \Delta w + \textcolor{#FCA311}{b_k^T} \Delta w\\
& ~~\text{s.t.} & & 0 = C_k \Delta w + c_k,\\
& & & 0 \leq D_k \Delta w + d_k,\\
& & & 0 = \Delta s_0 + (s_0-x_k)
\end{aligned}
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T B_k \Delta w + b_k ^T \Delta w\\
& ~~\text{s.t.} & & 0 = \textcolor{#FCA311}{C_k} \Delta w + \textcolor{#FCA311}{c_k},\\
& & & 0 \leq \textcolor{#FCA311}{D_k} \Delta w + \textcolor{#FCA311}{d_k},\\
& & & 0 = \Delta s_0 + (s_0-x_k)
\end{aligned}
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T B_k \Delta w + b_k ^T \Delta w\\
& ~~\text{s.t.} & & 0 = C_k \Delta w + c_k,\\
& & & 0 \leq D_k \Delta w + d_k,\\
& & & \textcolor{#FCA311}{0 = \Delta s_0 + (s_0-x_k)}
\end{aligned}
\(\Delta w \): (Primal) Variables including \(\Delta s_0 \)
\(B_k \): Hessian of Lagrangian
\(b_k \): Objective gradient
\(C_k, D_k \): Jacobians of (in-)equality constraints
\(c_k, d_k \): Residuals of (in-)equality constraints
QP at sampling time \(t_k\):
3. SQP METHOD
Initial Value Embedding Constraint
Depend only on \(w_k\)
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
OUTLINE
1
Optimal Control Problem Formulation and Nonlinear Model Predictive Control
2
Problem Discretization using Direct Multiple Shooting
3
The Sequential Quadratic Programming Method as Solution Method for the Nonlinear Programs
4
Real - Time Iterations
5
Multi - Level Iterations
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
Observations:
- Exact controls cannot be computed without delay
\(\rightarrow\) Rather compute approximate solutions quickly! - Subsequent OCPs parametrized by current state \(x_k\)
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T B_k \Delta w + b_k ^T \Delta w\\
& ~~\text{s.t.} & & 0 = C_k \Delta w + c_k,\\
& & & 0 \leq D_k \Delta w + d_k,\\
& & & 0 = \Delta s_0 + (s_0-\textcolor{#FCA311}{x_k})
\end{aligned}
Efficient solution method: Parametric Active-Set Method implemented in qpOASES
Diehl, M., et. al. (2002). Real-time optimization and nonlinear model predictive control of processes governed by differential-algebraic equations.
1st key idea of RTI:
Perform only a single SQP iteration per sample time
Solve:
Ferreau, H. J., et. al. (2014). qpOASES: A parametric active-set algorithm for quadratic programming.
4. REAL-TIME ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T B_k \Delta w + b_k ^T \Delta w\\
& ~~\text{s.t.} & & 0 = C_k \Delta w + c_k,\\
& & & 0 \leq D_k \Delta w + d_k,\\
& & & 0 = \Delta s_0 + (s_0-x_k)
\end{aligned}
Observation: Current state \(x_k\) enters OCPs linearly
2nd key idea of RTI:
Split computations in preparation and feedback phase
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T \textcolor{#FCA311}{B_k} \Delta w + \textcolor{#FCA311}{b_k ^T} \Delta w\\
& ~~\text{s.t.} & & 0 = \textcolor{#FCA311}{C_k} \Delta w + \textcolor{#FCA311}{c_k},\\
& & & 0 \leq \textcolor{#FCA311}{D_k} \Delta w + \textcolor{#FCA311}{d_k},\\
& & & \textcolor{#14213D}{0 = \Delta s_0 + (s_0-x_k)}
\end{aligned}
Preparation Phase for \(t_k\)
t_{k-1}
t_{k}
Feedback
Feedback
4. REAL-TIME ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
OUTLINE
1
Optimal Control Problem Formulation and Nonlinear Model Predictive Control
2
Problem Discretization using Direct Multiple Shooting
3
The Sequential Quadratic Programming Method as Solution Method for the Nonlinear Programs
4
Real - Time Iterations
5
Multi - Level Iterations
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
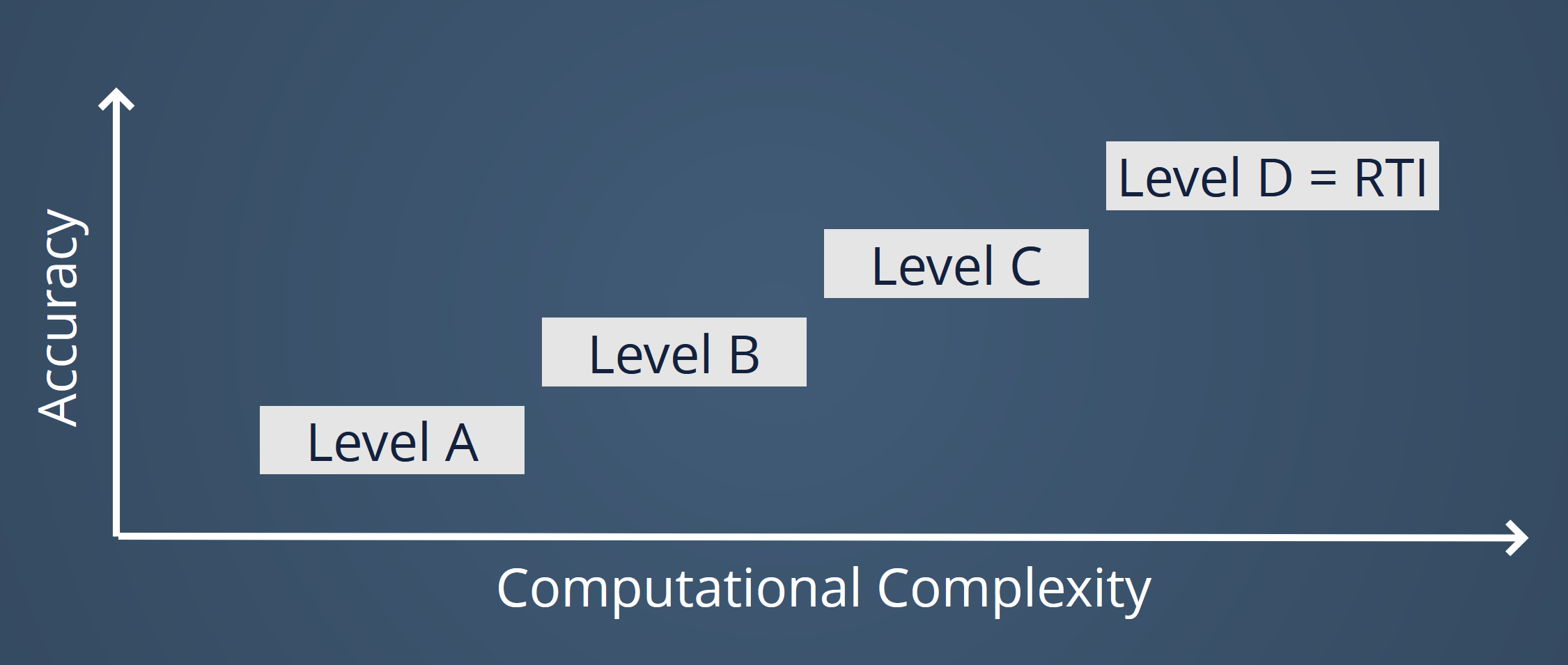
Observation: Linearizations can be valid for a longer time period
Key idea of MLI:
Reduce expensive evaluations by updating the QPs in 4 levels
Wirsching, L. (2018). Multi-Level Iteration Schemes with Adaptive Level Choice for Nonlinear Model Predictive Control.
Level D = RTI
Level C
Level B
Level A
Computational Complexity
Accuracy
Level D = RTI
Level C
Level B
Level A
Levels can run in parallel and communicate with each other.
5. MULTI-LEVEL ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T B_k \Delta w + b_k ^T \Delta w\\
& ~~\text{s.t.} & & 0 = C_k \Delta w + c_k,\\
& & & 0 \leq D_k \Delta w + d_k,\\
& & & 0 = \Delta s_0 + (s_0-x_k)
\end{aligned}
Level D = RTI
Computational Complexity
Accuracy
Level D = RTI
Level C
Level B
Level A
Level C
Level B
Level A
5. MULTI-LEVEL ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T \textcolor{#FCA311}{B_k} \Delta w + \textcolor{#FCA311}{b_k ^T} \Delta w\\
& ~~\text{s.t.} & & 0 = \textcolor{#FCA311}{C_k} \Delta w + \textcolor{#FCA311}{c_k},\\
& & & 0 \leq \textcolor{#FCA311}{D_k} \Delta w + \textcolor{#FCA311}{d_k},\\
& & & 0 = \Delta s_0 + (s_0-\textcolor{#FCA311}{x_k})
\end{aligned}
Computational Complexity
Accuracy
Level D = RTI
Level C
Level B
Level A
Level D = RTI
Level D = RTI
Level C
Level B
Level A
Full linearization iterations
5. MULTI-LEVEL ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
Computational Complexity
Accuracy
Level D = RTI
Level C
Level B
Level A
Level D = RTI
Level D = RTI
Full linearization iterations
Level C
Level B
Level A
Optimality Iterations
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T B_k \Delta w + \textcolor{#FCA311}{b_k ^T} \Delta w\\
& ~~\text{s.t.} & & 0 = C_k \Delta w + \textcolor{#FCA311}{c_k},\\
& & & 0 \leq D_k \Delta w + \textcolor{#FCA311}{d_k},\\
& & & 0 = \Delta s_0 + (s_0-\textcolor{#FCA311}{x_k})
\end{aligned}
No new Hessian and (full) Jacobians!
New Jacobians enter as matrix-vector products only
5. MULTI-LEVEL ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
Computational Complexity
Accuracy
Level D = RTI
Level C
Level B
Level A
Level D = RTI
Level D = RTI
Full linearization iterations
Level C
Level B
Level A
Optimality Iterations
Feasibility Iterations
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T B_k \Delta w + \textcolor{#FCA311}{b_k ^T} \Delta w\\
& ~~\text{s.t.} & & 0 = C_k \Delta w + \textcolor{#FCA311}{c_k},\\
& & & 0 \leq D_k \Delta w + \textcolor{#FCA311}{d_k},\\
& & & 0 = \Delta s_0 + (s_0-\textcolor{#FCA311}{x_k})
\end{aligned}
No new Jacobians involved
5. MULTI-LEVEL ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
Computational Complexity
Accuracy
Level D = RTI
Level C
Level B
Level A
Level D = RTI
Level D = RTI
Full linearization iterations
Level C
Level B
Level A
Optimality Iterations
Feasibility Iterations
Feedback Iterations
\begin{aligned}
&\min_{\Delta w} & &\frac{1}{2}\Delta w ^T B_k \Delta w + b_k ^T \Delta w\\
& ~~\text{s.t.} & & 0 = C_k \Delta w + c_k,\\
& & & 0 \leq D_k \Delta w + d_k,\\
& & & 0 = \Delta s_0 + (s_0-\textcolor{#FCA311}{x_k})
\end{aligned}
5. MULTI-LEVEL ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
4. MLI: Reduce expensive evaluations by updating the QPs in 4 levels
3. RTI: Solve only one QP per sampling time and split computations in preparation and feedback phase

2. Apply an SQP-type method to the NLPs
1. The \(\infty\)-dim. OCP is discretized using Multiple Shooting
SUMMARY
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
4. REAL-TIME ITERATIONS
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
5. MULTI-LEVEL ITERATIONS
Uncontrolled chain
Chain controlled with MLI
Videos from: Wirsching, L. (2018). Multi-Level Iteration Schemes with Adaptive Level Choice for Nonlinear Model Predictive Control.
Ihno Schrot — Real-Time Iterations and Multi-Level Iterations — MORFAE Workshop Clausthal — September 21, 2023
RTI and MLI at MORFAE Workshop Clausthal
By Ihno Schrot
RTI and MLI at MORFAE Workshop Clausthal
MORFAE Workshop Clausthal



