TECNOLOGÍA Y APLICACIONES

LiDAR
(LIght Detection And Ranging)
- Técnica que consiste en la detección y medición de luz
- Trabaja en el rango del espectro visible e infrarrojo
- Capaz de realizar mediciones de distancia
- Sensor activo. Transmite luz a un objeto
Cambio en las propiedades de la luz reflejada
¿Mediciones? a partir de la distancia y propiedades del medio
En función del tiempo
R = c*t/2
Diferencia de fase
R = 1 / 4pi * c / f * ¢
¿Qué es LiDAR?
Distanciómetro láser
| R = distancia sensor-objeto |
c = velocidad de la luz |
t = tiempo entre la emisión y larecepción del pulso |
f = frecuencia (Hz) |
¢ = diferencia de fase entre la señal emitida y la recibida |
|---|
Sensores

| Transmisor | Receptor | Detector | Contador de tiempo |
|---|---|---|---|
| Generar los pulsos de luz | Recoge y procesa la luz de vuelta | Convierte la luz en señal eléctrica | Define la exactitud de la distancia |
HARDWARE
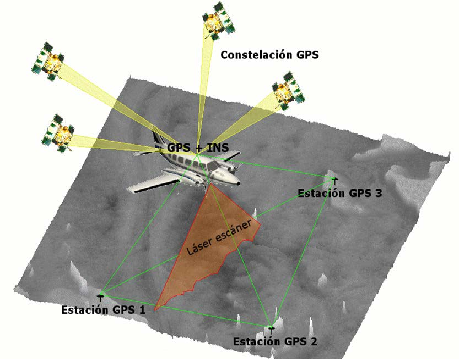
Sistemas LiDAR aerotransportados
Sensores más utilizados por proporcionar coordenadas tridimensionales (x, y, z) mediante barridos láser sobre el terreno.
Compuestos por:
- Escáner láser
- Receptor GPS / Estación de referencia
-
Sistema de Navegación Inercial (INS)
-
Unidad de almacenamiento y proceso
-
Cámara digital
Posición (x, y, z) en coordenadas UTM y altura elipsoidal sobre ETRS89
Se obtiene
paso de alturas elipsoidales a ortométricas mediante el modelo del geoide EGM08-REDNAP
algoritmos de clasificación para discriminar árboles, superfícies, edificios, etc
Características sensores LiDAR
Capacidad de registro:
-
De pulso
- Registran el último pulso
- Registran el primero y el último
- Registran los 3-4 primeros y el último
-
De onda continua
- Descomponen la ondaen múltiples distribuciones de Gauss
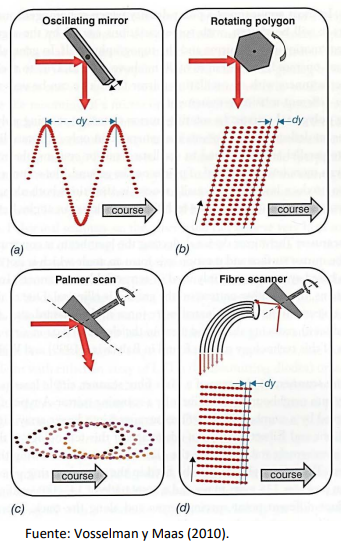
Patrón de escaneo o trayectoria:
- depende del mecanismo de escaneo
Según la banda de emisión:
-
aplicaciones topográficas
-
aplicaciones batimétricas
-
LiDAR multiespectral
Características sensores LiDAR
Frecuencia de emisión de pulsos
- Kilohercios (KHz)
- + frecuencia + precisión
Frecuencia de escaneo: nº líneas
Ángulo de escaneo: influye en el FOV y el tamaño de la huella.
Diámetro de la huella y distancia entre huella
- huella pequeña (0'3cm a 3m)
- huella grande (10 - 70m)
Divergencia: incremento del diámetro con la distancia
| Densidad de puntos | + densidad | + Precisión |
| Altura de vuelo | + altura | - precisión |
| Ángulo escaneo | + ángulo | - precisión |
| Frecuencia pulsación | + frecuencia | + precisión |
| Frecuencia escaneado | + frecuencia | + precisión |
Formato LAS
- Formato público para intercambio de nubes de puntos 3D
- Alternativa a los archivos ASCII
- Mantiene la información total de los datos LiDAR
-
Estándar
Formato LAZ
- Compresión de ficheros LAS
- Librería desarrollada por Martin Isenburg (LASzip)
| CLASIFICACIÓN | ATRIBUTO |
|---|---|
| 0 | No clasificado |
| 1 | Sin clasificar |
| 2 | Suelo |
| 3 | Vegetación baja |
| 4 | Vegetación media |
| 5 | Vegetación alta |
| 6 | Edificios |
| 7 | Ruido |
| 8 | Clave de modelo |
| 9 | Agua |
| Atributos de un LAS |
|---|
| Ángulo de escaneo |
| Tiempo GPS |
| Número retorno |
| Elevación |
| Clasificación |
| Intensidad |
| Color |
| Atributos LAS PNOA |
|---|
| Ángulo de escaneo |
| Tiempo GPS |
| Número retorno |
| Elevación |
| Clasificación |
| Intensidad |
| Color |
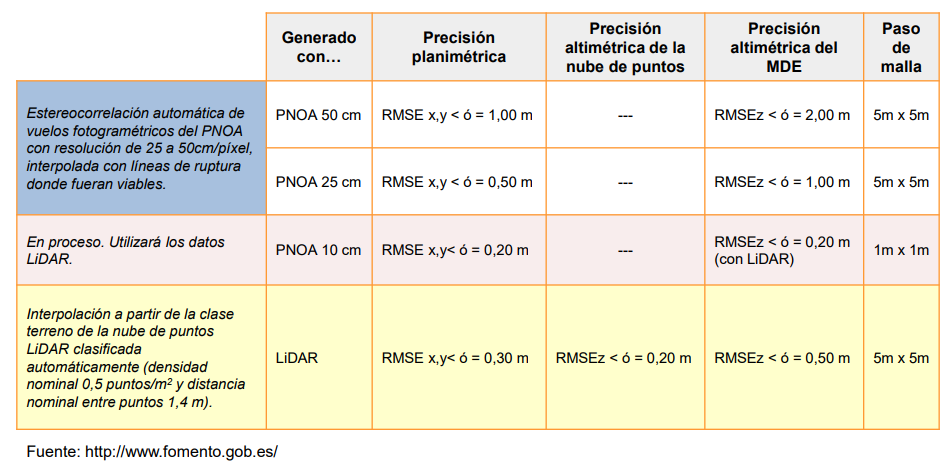
LiDAR PNOA
- Ficheros de 2x2 km de extensión.
- Formato LAZ
- ETRS89 UTM
-
Alturas ortométrica
-
Densidad de 0,5 puntos/m2
Los datos LiDAR nos permitirán generar
- Modelos Digitales del Terreno. Representan la distribución espacial de una propiedad de la superficie de terreno
- Modelos Digitales de Superficie. primera superficie reflexiva que es iluminada por un sensor
| APLICACIONES | BENEFICIOS |
|---|---|
| - Modelos hidrológicos - Estudios de vegetación - Riesgos - Cuencas visuales - Perfiles topográficos - Planificación urbana - Infraestructuras - Orientaciones - Movimientos de tierra - Pendientes - Propagación incendios forestales |
- Mayor cantidad de puntos por superficie. - Adecuado para superficies grandes y de difícil acceso - Más sensible a los cambios suaves de elevación - Mayor precisión en el cálculo del MDE - No necesario el solape entre pasadas ni la toma de puntos de apoyo. - Automatización de los procesos y generación “rápida” de resultados. - Independencia en las condiciones de iluminación. No afectan las sombras |
Antes de generar un MDT...
Separar de la nube de puntos en:
puntos de tierra - no tierra
Mediante: FILTROS
Punto a Punto
Punto a Puntos
Puntos a Puntos
Clasificación por número de pasos
- Múltiples pasos (iterativos): acumularán más información
- Paso único: + rápido, - preciso
Tipos de FILTROS
Basados en pendiente
- Punto a puntos
- Paso único
- Se mide la pendiente con los más cercanos
- Mal comportamiento ante falsos puntos bajos
- Preserva discontinuidades
Tipos de FILTROS
Basados en bloques mínimos
- Punto a puntos
- Iterativo
- Malla sobre la que se define el bloque mínimo
- Mal comportamiento frente a objetos bajos
Basados en superficie
- Puntos a puntos
- Iterativo
- Por interpolaciones + buffer con umbral
- Mal comportamiento ante escenas complejas
Basados en segmentaciones
- Se clasifican grupos enteros con características similares
Pasos previos para trabajar con nubes de puntos LiDAR
- Clasificación puntos como suelo ó no suelo
- Primeros retornos = superficie más elevada
- Último registro = superficie de suelo
- Generar MDT, MDE o MDS mediante interpolaciones
LidarLogroño
By joancano


