TIPE
|
Amortisseur réglable : une solution innovante pour les systèmes parasismiques |

1
2
Rapport avec le thème :
Milieux : interactions, interfaces, homogénéité, ruptures

Par étude temporelle, recherche du meilleur coefficient d’amortissement permettant de limiter les variations d’amplitude d'une structure.
Objectif de l'étude :

I. Présentation du support expérimental
II. Modélisation du comportement dynamique
III. Expérimentation
Sommaire
3
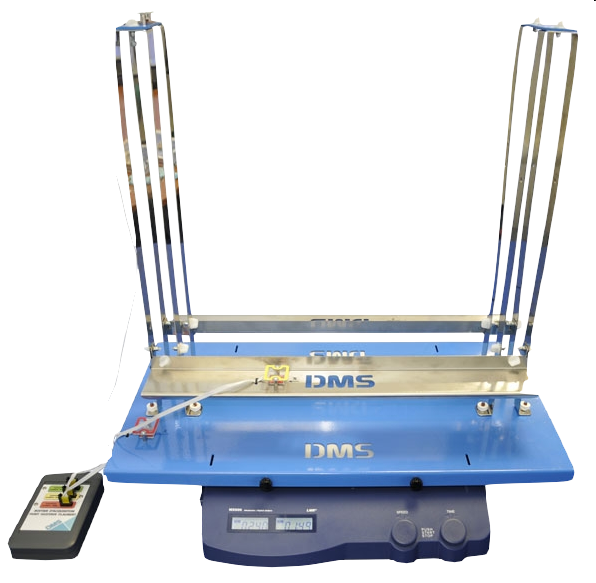
- Table d’excitation à fréquence variable
- Possession capteurs et éléments structurels
- Support facile à adapter
1/ Simulation d'un séisme
Fréquence max : 5,8 Hz
Fréquence min : 1,7 Hz
4
I. Présentation du support expérimental
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
PONT GUSTAVE FLAUBERT
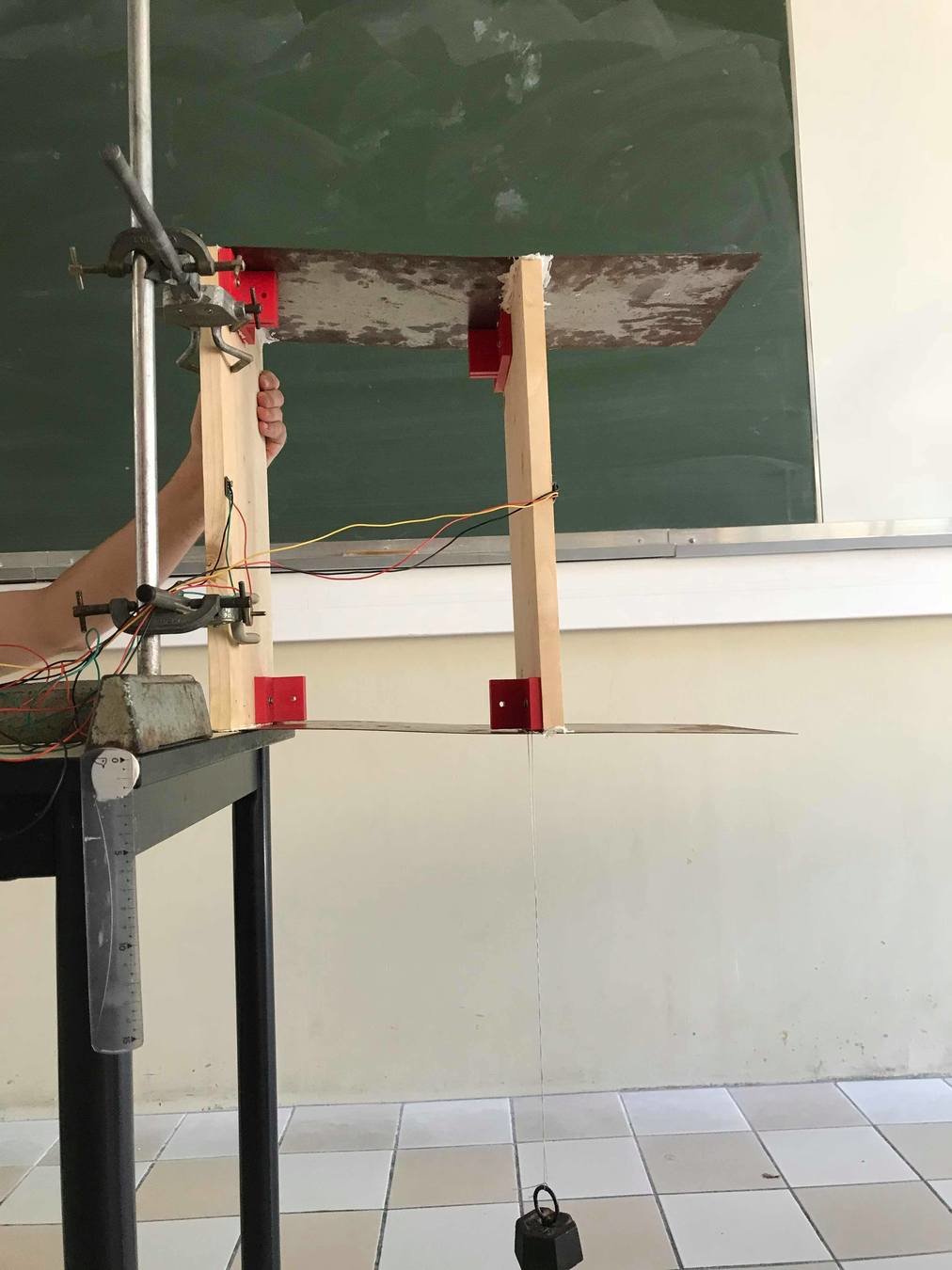
- Modélisation du bâtiment : plaques en bois (x2) et plaques en acier (x2)
- Fixation des amortisseurs
2/ Modélisation d'un bâtiment parasismique
25 cm
27 cm
Protocole

- Mise en place du bâtiment sur le pont Gustave Flaubert
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
5
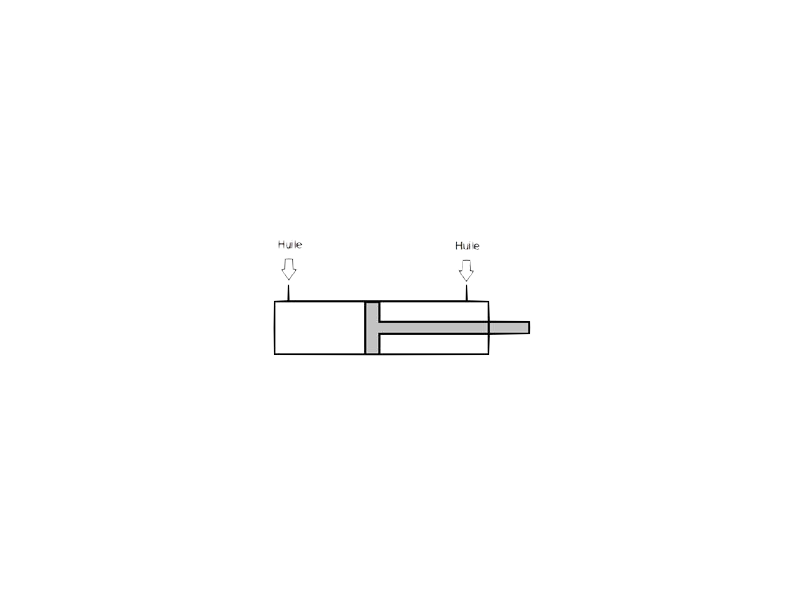
Amortisseurs réglables

120mm
Possibilité de changer l'huile de l'amortisseur



1 1cP = 1 mPa.s
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
6
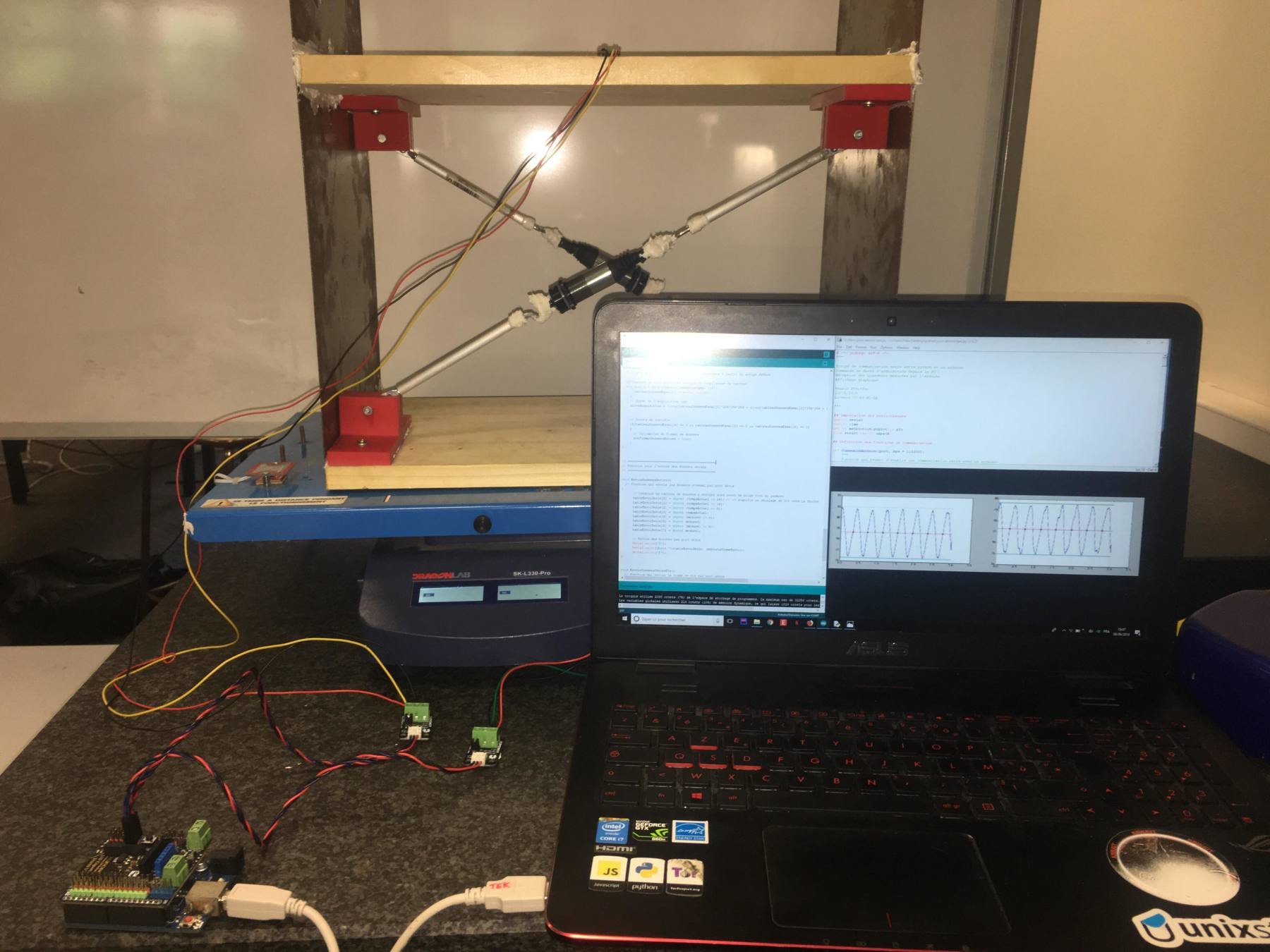
3/ Acquisition des informations
Accéléromètre étage
Accéléromètre tablier
Carte arduino

Acquérir
Traiter
Communiquer
Chaîne d'information
Acquisition des informations
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
7
Mesure des accélérations sur une plage de +3g
Mesure des accélérations de pesanteur
Mesure l'accélération dynamique résultant des vibrations
-
Accéléromètre (x2)
-
Programme python
Connection à arduino
Réception des données
Fonction lissage
Détermination du module
Détermination de la période
Détermination du retard
-
x
y
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
8
II/ Modélisation du comportement dynamique
kθ
O
x
θ
-λv
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
9
1/ Détermination du coefficient de rigidité k de l'acier
Protocole :
Application d'une force au niveau du 2ème étage
Calcul de l'angle de déformation
θ
F=

Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
10
kθ
2
= (204 ±11)N/rad
F(N)
θ(rad)
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
11
k
2
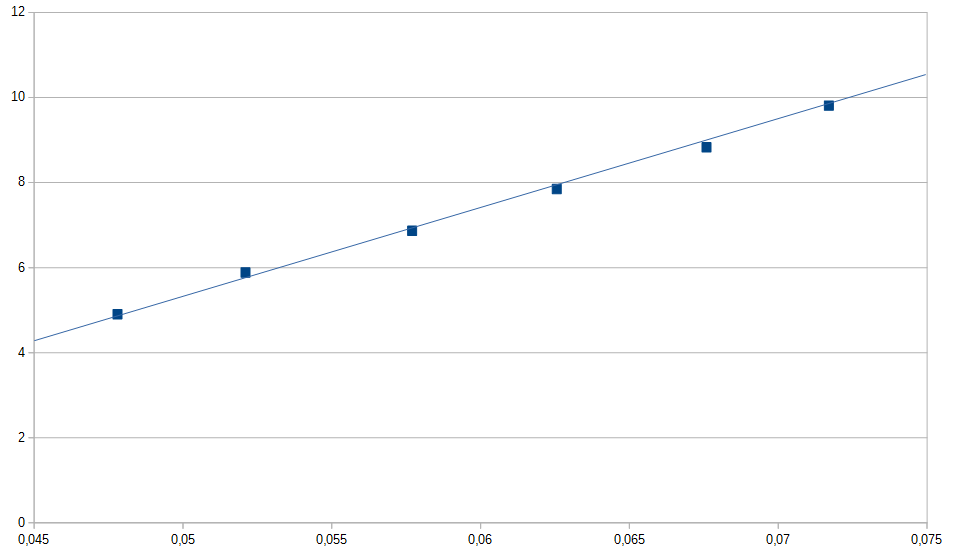
2/ Détermination du coefficient de viscosité λ de l'amortisseur
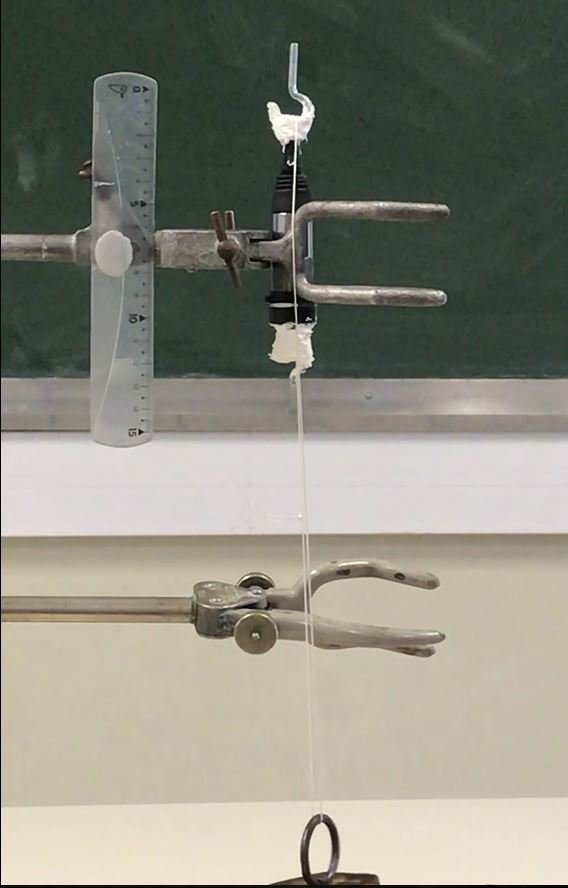
Experience
amortisseur
masse
Logiciel de pointage Tracker
F= -λx
Protocole :
Application d'une force sur l'amortisseur
Calcul de la vitesse de translation
x
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
12
400 cP
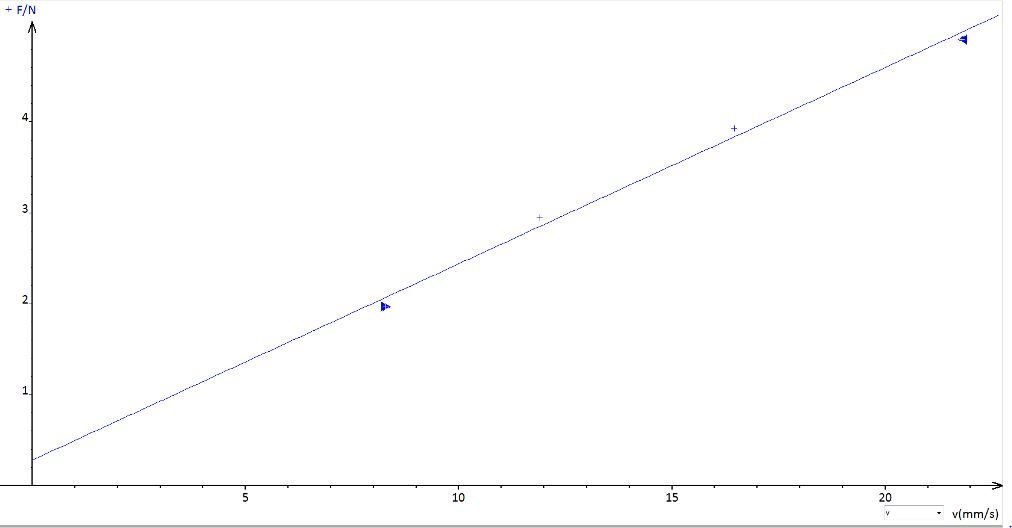
λ = 216 N.m .s
0.0083
200g
300g
400g
500g
0.0119
0.0165
0.0218
v(m/s)
F(N)
1.962
2.943
3.924
4.905
masse (g)
Même expérience pour chaque huile :
| Viscosité (cP) | 200 | 400 | 600 |
|---|---|---|---|
| λ(N.m .s) | 58 | 216 | 354 |
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
13
-1
-1
3/ Dynamique
Système : {Plaque à l'étage}
Bilan des forces :
P = -mgz
Fp =
Fa=-λ(cos(α)xx+sin(α)zz)
-kθ
-λx
O
x
θ
z
Équation résultante du Principe fondamental de la dynamique projetée sur x :
mx + + + = 0
L
Fa
P
Fp
x
2
λx
kx
L
x
kθ
α=
α
π θ
4 2
L=0,27m
λxx
4L
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
14
ω =
0
k
Lm
ζ =
λ L
4 km
Identification
Applications numériques :
ζ = 0,37
ζ = 1,39
ζ= 2,28
ω = (38.9 + 8,6)rad/s
0
200cP :
400cP :
600cP :
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
15
III/ Expérimentation

Protocole :
Application d'une force au niveau de l'étage
Rupture du fil : Échelon
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
Etude temporelle
16
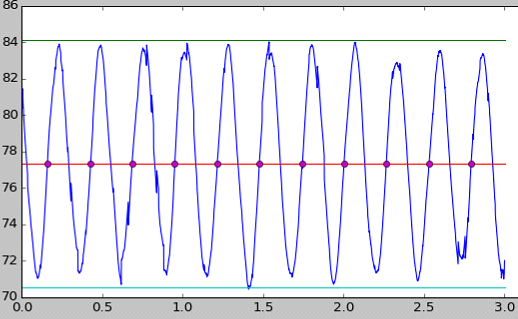
1 / Etude temporelle
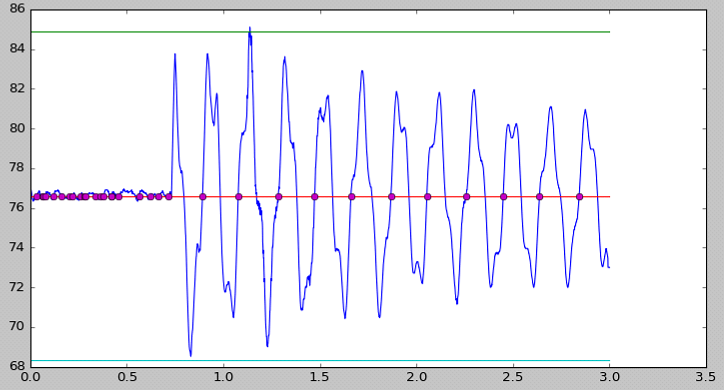
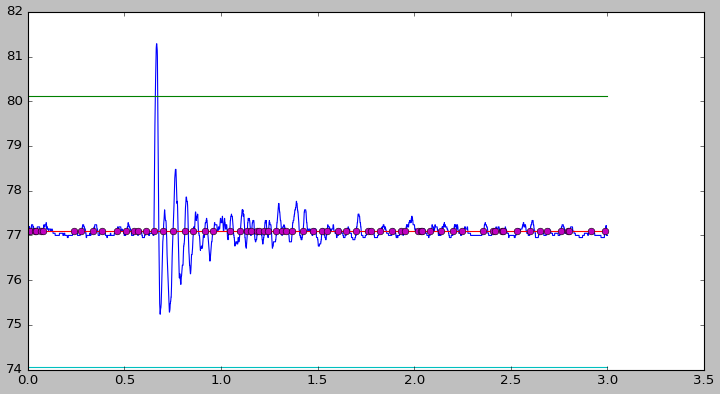
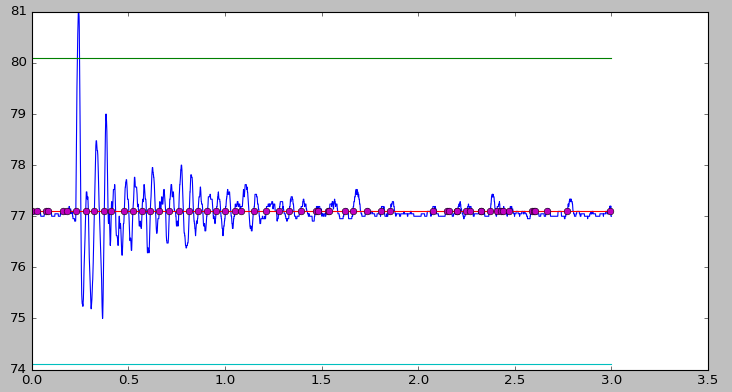
Réponse à un échelon : application de 9.81N
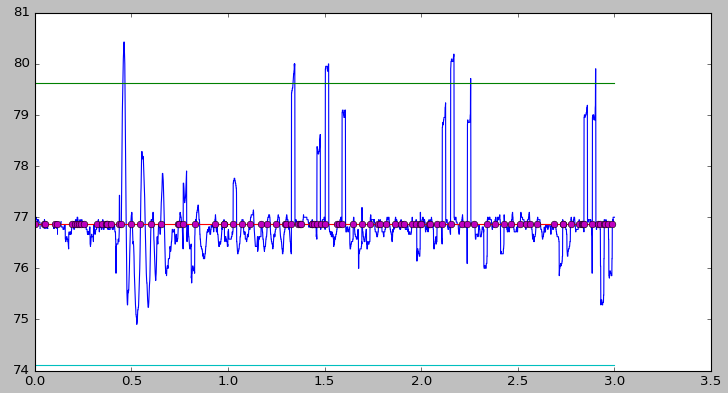
Sans amortisseur
amortisseur (200cp)
amortisseur (400cp)
amortisseur (600cp)
ω =32,4 rad/s
0
Support expérimental
Modélisation
Expérimentation
Séisme
Bâtiment
Informations
λ
k
Dynamique
17
ζ = 0,37
ζ =1,39
ζ=2,28
III/ conclusion
18
1
2
200cP :
400cP :
600cP :
0
0
0
| ζ | ω : | |
|---|---|---|
| Modélisation |
Plus λ augmente plus ζ augmente Régime privilégié : apériodique ( ζ > ) |
ω = (38.9 + 8,6)rad/s |
| Expérimentation | ω =32,4 rad/s |
Copy of Copy of Copy of TIPE 2016/2017
By Jules Dupont


