Crane Swings
クレーンスウィングス
LINE Things Mini Award応募用
2019/09/22
みなみじま こういち
概要
- LINEで操作できるUFOキャッチャー
- 食後 の一家団欒時に、食後のおやつをゲームで楽しむ。
- Wifi不要。電源とLINEがあればどこでも楽しめる

システム構成(超簡易的)
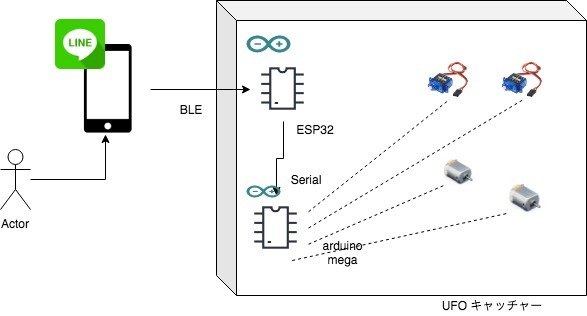
使ったアイテム
- arduino mega 互換機
- esp32 devkit
- タミヤ ユニバーサルプレート等多数
- ダンボールとか
- 100均で細かいものをいろいろ
- サーボモーター SG90x2基
- DCモーター(タミヤ4速パワーギヤボックスHE) x2基
- L293Dモーターシールド
- 超音波センサー(HC-SR04)
- 電池ボックス1.5v x 8 = 12v
- 電池ボックス3.7v x 2 = 7.4v
- サーボ付きのアーム
プログラムソース -LIFF-
https://github.com/ikegam1/line-things-starter/tree/master/liff-app
役割:
line-things-starterのソースを改変したもの
ボタンが押された時にESP32に信号を送っています。
※プロトタイプ
プログラムソース -ESP32-
https://github.com/ikegam1/arduino-crane-swings/tree/master/line-things-ble-hub
役割:
LIFFと直接やりとりしており、裏でarduinoとSerial通信をしている。
(ちょうどいいBLEモジュールが入手できなかったため)
SerialはPCとの通信時に、arduinoとはSerial2を使用
※まだ機能していないがロードセルでGETしたお菓子の重量を測っています。
#include "env.h"
#include <BLEServer.h>
#include <BLEDevice.h>
#include <BLEUtils.h>
#include <BLE2902.h>
#include <WiFi.h>
#define RXD1 18
#define TXD1 19
#define RXD2 25
#define TXD2 26
#define pin_dout 14
#define pin_slk 27
void AE_HX711_Init(void);
void AE_HX711_Reset(void);
long AE_HX711_Read(void);
long AE_HX711_Averaging(long adc,char num);
float AE_HX711_getGram(char num);
#define OUT_VOL 0.001f //定格出力 [V]
#define LOAD 1000.0f //定格容量 [g]
//HardwareSerial Serial2(2);
BLEServer* thingsServer;
BLESecurity *thingsSecurity;
BLEService* userService;
BLEService* psdiService;
BLECharacteristic* psdiCharacteristic;
BLECharacteristic* writeCharacteristic;
BLECharacteristic* notifyCharacteristic;
bool deviceConnected = false;
bool oldDeviceConnected = false;
volatile int btnAction = 0;
uint8_t btnValue;
class serverCallbacks: public BLEServerCallbacks {
void onConnect(BLEServer* pServer) {
deviceConnected = true;
};
void onDisconnect(BLEServer* pServer) {
deviceConnected = false;
}
};
class writeCallback: public BLECharacteristicCallbacks {
void onWrite(BLECharacteristic *bleWriteCharacteristic) {
std::string value = bleWriteCharacteristic->getValue();
Serial.println(value.c_str());
Serial2.println(value.c_str());
delay(10);
}
};
float offset;
void setup() {
//Wifiは使わない
WiFi.mode(WIFI_OFF);
Serial.begin(115200);
Serial.setDebugOutput(true);
Serial.println("BLE Deveice init");
BLEDevice::init("");
BLEDevice::setEncryptionLevel(ESP_BLE_SEC_ENCRYPT_NO_MITM);
// Security Settings
BLESecurity *thingsSecurity = new BLESecurity();
thingsSecurity->setAuthenticationMode(ESP_LE_AUTH_REQ_SC_ONLY);
thingsSecurity->setCapability(ESP_IO_CAP_NONE);
thingsSecurity->setInitEncryptionKey(ESP_BLE_ENC_KEY_MASK | ESP_BLE_ID_KEY_MASK);
setupServices();
startAdvertising();
Serial.println("Ready to Connect");
Serial1.begin(9600, SERIAL_8N1, RXD1, TXD1);
Serial2.begin(9600, SERIAL_8N1, RXD2, TXD2);
Serial2.println(0);
delay(50);
AE_HX711_Init();
AE_HX711_Reset();
offset = AE_HX711_getGram(30);
}
void loop() {
String input;
uint8_t finish = 36;
uint8_t i;
// Disconnection
if (!deviceConnected && oldDeviceConnected) {
delay(500); // Wait for BLE Stack to be ready
thingsServer->startAdvertising(); // Restart advertising
oldDeviceConnected = deviceConnected;
}
// Connection
if (deviceConnected && !oldDeviceConnected) {
oldDeviceConnected = deviceConnected;
}
float data;
char S1[20];
char s[20];
data = AE_HX711_getGram(5);
//data = 55.0 / 50.0; //ここで校正を行う
sprintf(S1,"%s [g] (0x%4x)",dtostrf((data-offset), 5, 3, s),AE_HX711_Read());
//10g以上で何かとれたと判断
if((data-offset) >= 10.0){
Serial.println((data-offset));
Serial.println(S1);
//Thingsに送る
notifyCharacteristic->setValue(&finish, 1);
notifyCharacteristic->notify();
}
//esp32からのリターン
if (Serial1.available() > 0) {
Serial.println("Receive:");
// 改行コード(10)を検出したら、そこまでの文字列を取得
input = Serial1.readStringUntil(10);
Serial.println(input);
i = input[0] - '0';
if ( i >= 0 ){
//Thingsに送る
notifyCharacteristic->setValue(&i, 1);
notifyCharacteristic->notify();
}
}
delay(50);
}
void setupServices(void) {
// Create BLE Server
thingsServer = BLEDevice::createServer();
thingsServer->setCallbacks(new serverCallbacks());
// Setup User Service
userService = thingsServer->createService(USER_SERVICE_UUID);
// Create Characteristics for User Service
writeCharacteristic = userService->createCharacteristic(WRITE_CHARACTERISTIC_UUID, BLECharacteristic::PROPERTY_WRITE);
writeCharacteristic->setAccessPermissions(ESP_GATT_PERM_READ_ENCRYPTED | ESP_GATT_PERM_WRITE_ENCRYPTED);
writeCharacteristic->setCallbacks(new writeCallback());
notifyCharacteristic = userService->createCharacteristic(NOTIFY_CHARACTERISTIC_UUID, BLECharacteristic::PROPERTY_NOTIFY);
notifyCharacteristic->setAccessPermissions(ESP_GATT_PERM_READ_ENCRYPTED | ESP_GATT_PERM_WRITE_ENCRYPTED);
BLE2902* ble9202 = new BLE2902();
ble9202->setNotifications(true);
ble9202->setAccessPermissions(ESP_GATT_PERM_READ_ENCRYPTED | ESP_GATT_PERM_WRITE_ENCRYPTED);
notifyCharacteristic->addDescriptor(ble9202);
// Setup PSDI Service
psdiService = thingsServer->createService(PSDI_SERVICE_UUID);
psdiCharacteristic = psdiService->createCharacteristic(PSDI_CHARACTERISTIC_UUID, BLECharacteristic::PROPERTY_READ);
psdiCharacteristic->setAccessPermissions(ESP_GATT_PERM_READ_ENCRYPTED | ESP_GATT_PERM_WRITE_ENCRYPTED);
// Set PSDI (Product Specific Device ID) value
uint64_t macAddress = ESP.getEfuseMac();
psdiCharacteristic->setValue((uint8_t*) &macAddress, sizeof(macAddress));
// Start BLE Services
userService->start();
psdiService->start();
}
void startAdvertising(void) {
// Start Advertising
BLEAdvertisementData scanResponseData = BLEAdvertisementData();
scanResponseData.setFlags(0x06); // GENERAL_DISC_MODE 0x02 | BR_EDR_NOT_SUPPORTED 0x04
scanResponseData.setName(DEVICE_NAME);
thingsServer->getAdvertising()->addServiceUUID(userService->getUUID());
thingsServer->getAdvertising()->setScanResponseData(scanResponseData);
thingsServer->getAdvertising()->start();
}
void AE_HX711_Init(void)
{
pinMode(pin_slk, OUTPUT);
pinMode(pin_dout, INPUT);
}
void AE_HX711_Reset(void)
{
digitalWrite(pin_slk,1);
delayMicroseconds(100);
digitalWrite(pin_slk,0);
delayMicroseconds(100);
}
long AE_HX711_Read(void)
{
long data=0;
while(digitalRead(pin_dout)!=0);
delayMicroseconds(10);
for(int i=0;i<24;i++)
{
digitalWrite(pin_slk,1);
delayMicroseconds(5);
digitalWrite(pin_slk,0);
delayMicroseconds(5);
data = (data<<1)|(digitalRead(pin_dout));
}
//Serial.println(data,HEX);
digitalWrite(pin_slk,1);
delayMicroseconds(10);
digitalWrite(pin_slk,0);
delayMicroseconds(10);
return data^0x800000;
}
long AE_HX711_Averaging(long adc,char num)
{
long sum = 0;
for (int i = 0; i < num; i++) sum += AE_HX711_Read();
return sum / num;
}
float AE_HX711_getGram(char num)
{
#define HX711_R1 20000.0f
#define HX711_R2 8200.0f
#define HX711_VBG 1.25f
#define HX711_AVDD 4.2987f//(HX711_VBG*((HX711_R1+HX711_R2)/HX711_R2))
#define HX711_ADC1bit HX711_AVDD/16777216 //16777216=(2^24)
#define HX711_PGA 128
#define HX711_SCALE (OUT_VOL * HX711_AVDD / LOAD *HX711_PGA)
float data;
data = AE_HX711_Averaging(AE_HX711_Read(),num)*HX711_ADC1bit;
//Serial.println( HX711_AVDD);
//Serial.println( HX711_ADC1bit);
//Serial.println( HX711_SCALE);
//Serial.println( data);
data = data / HX711_SCALE;
return data;
}プログラムソース -arduino-
https://github.com/ikegam1/arduino-crane-swings/tree/master/things-party-core
役割:
メインのプログラム。
状態をフラグで管理しており、DCモーター2基とサーボモーター2基を操作しています。
また、超音波センサーでアームの水平位置や垂直位置をキャッチし、制御に使用。
#include <SoftwareSerial.h>
#include <Servo.h>
//#include <MsTimer2.h>
//#include <TimerOne.h>
#include "config.h"
#include "env.h"
// Adafruit Motor Shild Libralyより
#include <AFMotor.h>
//BLEシリアルのPIN
SoftwareSerial BTserial(BTSerialRX,BTSerialTX); // RX, TX
// DCモーターのM4
// クレーンの左右
// わかりづらくなってしまったけど、M3がmotor4
AF_DCMotor motor4(3);
// HC-SR04の数値
long durationA;
int distanceA;
// DCモーターのM3
// クレーンの巻き上げ
AF_DCMotor motor3(4);
// HC-SR04の数値
long durationB;
int distanceB;
// アーム回転サーボ
Servo servoA;
int posA = 0;
// アーム開閉サーボ
Servo servoB;
int posB = 0;
//アクションフラグ
//各アクションを判別する(*=input)
// 0 = スタート
// 1 = クレーン右 *
// 2 = 水平移動ストップ *
// 3 = アーム回転 *
// 4 = アームストップ
// 5 = クレーン下
// 6 =
// 7 = アーム閉じる&クレーン上 *
// 8 = クレーン左
// 9 = クレーン左
int f=0;
void setup() {
// Open serial communications and wait for port to open:
Serial.begin(115200);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
// Define inputs and outputs:
pinMode(trigPinA, OUTPUT);
pinMode(echoPinA, INPUT);
pinMode(trigPinB, OUTPUT);
pinMode(echoPinB, INPUT);
servoA.attach(ServoPinA);
servoB.attach(ServoPinB);
// turn on motor
motor4.setSpeed(200);
motor4.run(RELEASE);
BTserial.begin(9600);
Serial.println("BTserial started at 9600");
pinMode(LedGreen, OUTPUT);
pinMode(LedBlue, OUTPUT);
pinMode(LedRed, OUTPUT);
OpenArm();
servoA.write(0);
delay(100);
//timer
//Timer1.initialize(1000000);
//Timer1.attachInterrupt(LedBlink);
//MsTimer2::set(1000, LedBlink);
//MsTimer2::start();
}
int led = 11; //R=100, G=10, B = 1 while=111, yellow=110, cyan=11
int recentDistanceA = 0;
int recentDistanceB = 0;
//床に置かれているお菓子などが超音波センサーに狂いを生じさせる。
//移動量は固定にして対応
int downCnt = 0;
int upCnt = 0;
uint8_t i;
String input;
void loop() {
if (BTserial.available() > 0) { // 受信したデータが存在する
Serial.println("Receive:");
// 改行コード(10)を検出したら、そこまでの文字列を取得
input = BTserial.readStringUntil(10);
Serial.println(input);
i = input[0] - '0';
if ( i >= 0 ){
f = i;
Serial.print("Receive:");
Serial.println(f);
}
}
LedBlink();
//f=FlgRotate; //debug
//start前
if(f==FlgStart){
led = 111;
downCnt = 0;
upCnt = 0;
servoB.write(0);
servoB.write(180);
delay(10);
return;
}
//Serial.print("mode=");
//Serial.println(f);
//右移動
if(f==FlgRight){
led = 1;
GetDistanceA();
Serial.println("mode=FlgRight");
Serial.print("distanceA=");
Serial.println(distanceA);
//誤差がおかしいときは何もしない
if(abs(distanceA - recentDistanceA) > 100 && recentDistanceA != 0){
Serial.print("abs(distanceA - recentDistanceA)");
Serial.println(abs(distanceA - recentDistanceA));
return;
}
//limitを超えるとStop
if(distanceA >= limitMaxPinA){
motor4.run(RELEASE);
delay(100);
f = FlgStop;
return;
}
//モーターを動かす
motor4.run(FORWARD);
Serial.print("motor4 run");
for (i=0; i<=180; i+=1) {
motor4.setSpeed(i);
delay(50);
}
delay(10);
recentDistanceA = distanceA;
}
//stop
if(f==FlgStop){
led = 0;
//Serial.print("mode=FlgStop");
motor4.run(RELEASE);
delay(10);
}
//アーム角度
if(f==FlgRotate){
led = 10;
//Serial.println("mode=FlgRotate");
Serial.println(posA);
posA+=1;
if(posA >= 360){
posA = 0;
i = 0;
}else if(posA > 180){
i = 180 - (posA - 180);
}else{
i = posA;
}
servoA.write(i);
delay(20);
}
if(f==FlgDown){
GetDistanceB();
Serial.print("mode=FlgDown");
delay(200);
f=FlgCatch;
}
if(f==FlgCatch){
led = 100;
GetDistanceB();
Serial.println("mode=FlgCatch");
//誤差がおかしいときは何もしない
if(abs(distanceB - recentDistanceB) > 100 && recentDistanceB != 0){
Serial.print("abs(distanceB - recentDistanceB)");
Serial.println(abs(distanceB - recentDistanceB));
//return;
}
//地面に近づくとCatch
downCnt+=1;
Serial.print("downCnt=");
Serial.println(downCnt);
//if(distanceB <= limitMinPinB){
if(downCnt >= 5){
motor3.run(RELEASE);
delay(1000);
CloseArm();
delay(2000);
f = FlgUp;
return;
}
//モーターを動かす アームダウン
motor3.run(FORWARD);
Serial.print("motor3 run");
for (i=0; i<180; i+=1) {
motor3.setSpeed(i);
delay(30);
}
motor3.run(RELEASE);
delay(10);
recentDistanceB = distanceB;
}
//クレーンをUp
if(f==FlgUp){
led = 110;
GetDistanceB();
//誤差がおかしいときは何もしない
if(abs(distanceB - recentDistanceB) > 100 && recentDistanceB != 0){
Serial.print("abs(distanceB - recentDistanceB)");
Serial.println(abs(distanceB - recentDistanceB));
//return;
}
//地面はなれるまでUp
upCnt+=1;
Serial.print("upCnt=");
Serial.println(upCnt);
//if(distanceB >= limitMaxPinB){
if(upCnt >= 3){
motor3.run(RELEASE);
delay(500);
f = FlgLeft;
return;
}
//モーターを動かす アームアップ
motor3.run(BACKWARD);
Serial.print("motor3 run");
for (i=0; i<100; i+=1) {
motor3.setSpeed(i);
delay(12);
}
motor3.run(RELEASE);
delay(10);
recentDistanceB = distanceB;
}
//左移動
if(f==FlgLeft){
led = 110;
GetDistanceA();
Serial.println("mode=FlgLeft");
Serial.print("distanceA=");
Serial.println(distanceA);
//誤差がおかしいときは何もしない
if(abs(distanceA - recentDistanceA) > 100 && recentDistanceA != 0){
Serial.print("abs(distanceA - recentDistanceA)");
Serial.println(abs(distanceA - recentDistanceA));
return;
}
//limitを下回るとStop
if(distanceA <= limitMinPinA){
motor4.run(RELEASE);
delay(1000);
// アームをオープン
OpenArm();
delay(1000);
f = FlgStart;
return;
}
//モーターを動かす
motor4.run(BACKWARD);
Serial.print("motor4 run");
for (i=0; i<100; i+=5) {
motor4.setSpeed(i);
delay(100);
}
delay(10);
recentDistanceA = distanceA;
}
}
int toggle = 1;
int timerCnt = 1;
int totalCnt = 1;
int _led = 0;
//点滅の間隔は1/100
void LedBlink() {
totalCnt+=1;
//3000Cnt毎にステータスを進める
if(DEBUG == 2 && totalCnt % 3000 == 0){
f+=1;
}
if(timerCnt < 100){
timerCnt += 1;
return;
}else{
if(DEBUG >= 1){
Serial.print("flag = ");
Serial.println(f);
GetDistanceA();
GetDistanceB();
Serial.print("distansA=");
Serial.println(distanceA);
Serial.print("distansB=");
Serial.println(distanceB);
}
}
timerCnt = 1;
_led = led;
digitalWrite(LedRed, HIGH);
digitalWrite(LedGreen, HIGH);
digitalWrite(LedBlue, HIGH);
if (_led >= 100 && toggle == 1){
digitalWrite(LedRed, LOW);
_led-=100;
}
if (_led >= 10 && toggle == 1){
digitalWrite(LedGreen, LOW);
_led-=10;
}
if (_led >= 1 && toggle == 1){
digitalWrite(LedBlue, LOW);
}
toggle = 1 - toggle;
}
void GetDistanceA(){
// 横方向のスタートからの距離を計測
digitalWrite(trigPinA, LOW);
delayMicroseconds(5);
digitalWrite(trigPinA, HIGH);
delayMicroseconds(10);
digitalWrite(trigPinA, LOW);
durationA = pulseIn(echoPinA, HIGH);
distanceA= durationA*0.034/2;
}
void GetDistanceB(){
// 横方向のスタートからの距離を計測
digitalWrite(trigPinB, LOW);
delayMicroseconds(5);
digitalWrite(trigPinB, HIGH);
delayMicroseconds(10);
digitalWrite(trigPinB, LOW);
durationB = pulseIn(echoPinB, HIGH);
distanceB= durationB*0.034/2;
}
void CloseArm(){
for(posB = 180; posB>0; posB-=10)
{
servoB.write(posB);
delay(100);
}
}
void OpenArm(){
for(posB = 0; posB<=180; posB+=10)
{
servoB.write(posB);
delay(100);
}
}推しポイント
製品化のイメージ
-
子供向けの工作キット。
-
ソースをセットで販売するのでカスタマイズ自在
- 比較的安価なパーツで構成しているのでお手頃価格
最後に
以上ですがよろしくお願いします。
Crane Swings
By Koichi Minamijima
Crane Swings
LINE Things Mini Award 応募用




