CS475 Project Presentation
Grid-based Particle SLAM
Yiannis-Christos Psaradakis
Constantine Kalivas
What is SLAM?
SLAM is an acronym for "Simultaneous Localization and Mapping".
Grid-based SLAM
Grid-based SLAM, also known as FastSLAM 2.0, is a re-iteration of the original Landmark-based FastSLAM 1.0
This approach uses what is called an "occupancy grid", a 2D Map where each tile keeps a state if it's occupied or not. Every tile represents a small area of the map.
Particle filters in the context of SLAM
The localisation part of SLAM is taken care of by a Particle filter.
Each particle keeps it's own belief of the map state and pose of the robot.
Odometry Update
Every particle updates it's position according to the result of the odometry, with a small deviation from the mean (calculated using a normal distribution)
Sensor Update
Since we're using ROS, we are making use of the laser scan data provided by the simulation, without making any assumptions about errors.
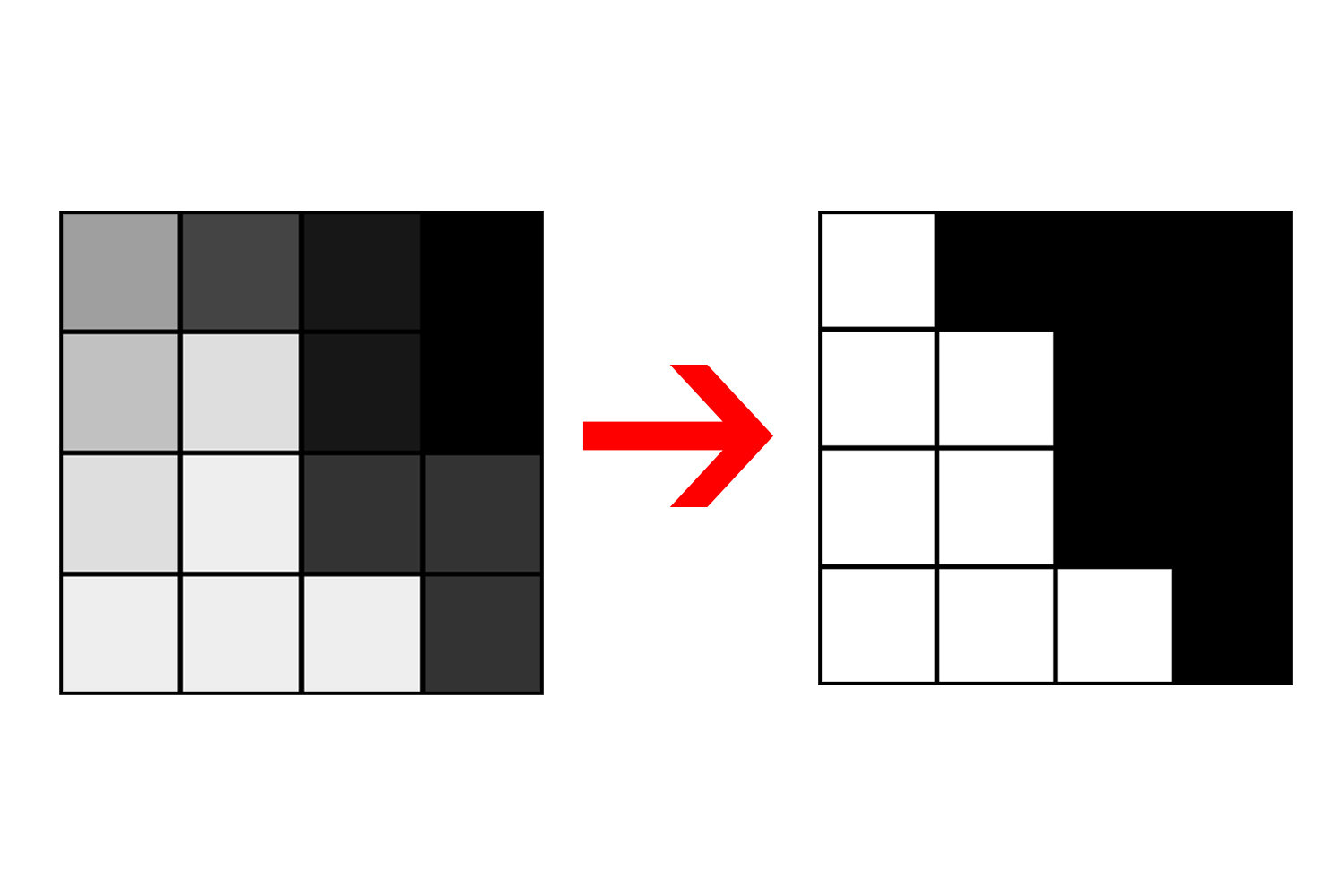
Probability Map
Internally, we use a probability map, identical in size to the grid. Each tile keeps a probability of the tile being occupied. It is a mean of all previous measurements
Grid(Map) Error Estimation
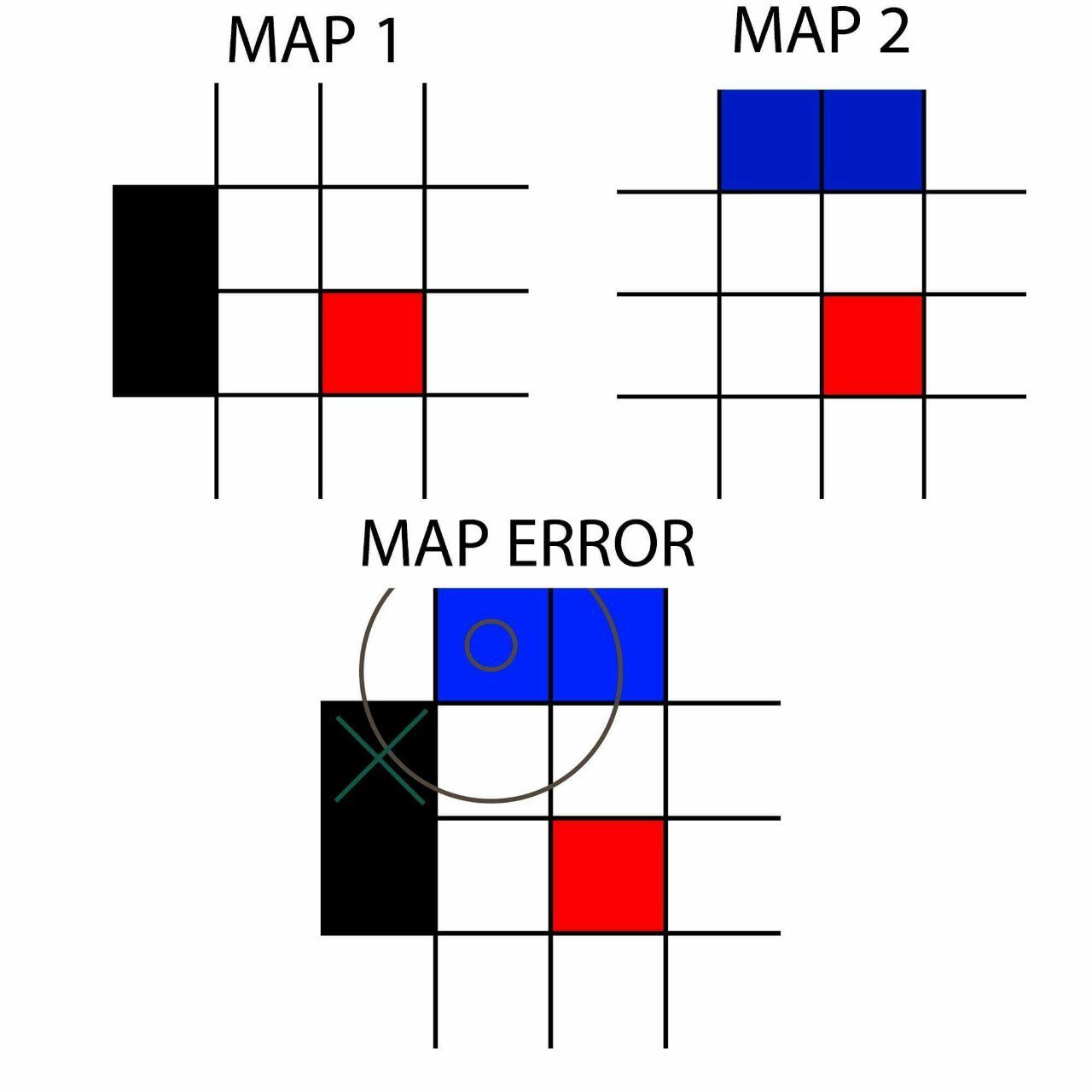
Particle survival
CS475 Project Presentation
By looselyrigorous
