Calibration and synchronization
of large-scale low-cost sensor networks
New Scenario
Large scale sensor deployment in the distribution networks
New Energetic Scenario - New Applications
State Estimation
Topology Detection
Monitoring
Need for large-scale distributed sensing
Challenges
- Low cost / low accuracy sensors
- Communication constraints
- Scalability of the monitoring infrastructure
2. Possible issues...
-
Low accuracy
-
Low precision

3. Due to...
-
Systematic measurement error
-
Synchronization error
-
Sensors parametric uncertainty
Similar Problem: Large scale WSN
1. Used for...
- State estimation
- Monitoring and control
Solution: Sensor calibration / sync errors compensation
Averaging useless!!
Distributed sensor blind calibration*
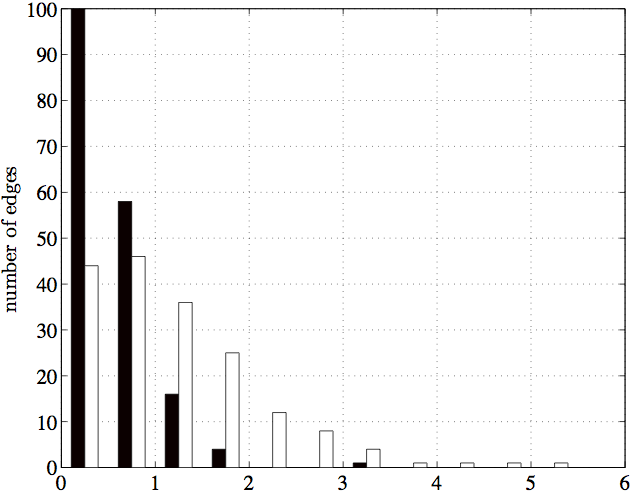
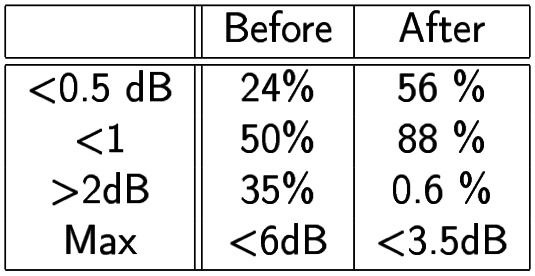
\mathrm{error\ [dBm]}
\mathrm{Asymmetric\ error\ before\ and\ after\ the\ offset\ correction}
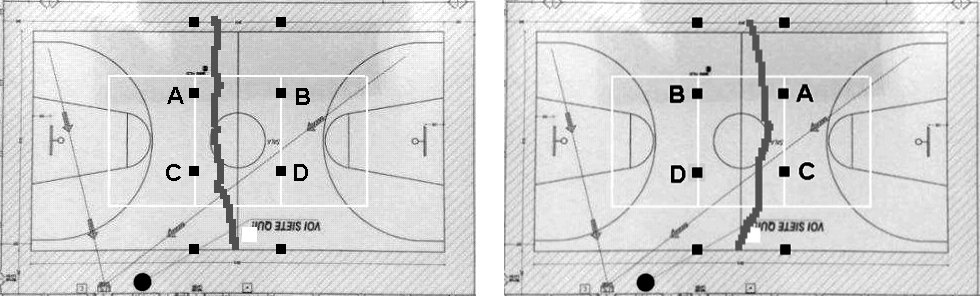
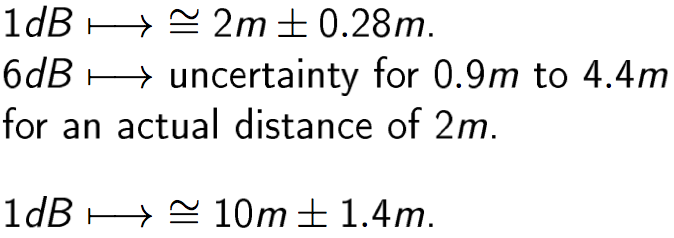
Effect of systematic errors when estimating distances
*no dependence on controlled stimuli/reference/high-fidelity groundtruth data
Sync Error Compensation
GPS
GPS
\begin{matrix}
v_{\mathrm{true}}^i + n^i_v\\
\theta_{\mathrm{true}}^i + n^i_\theta
\end{matrix}
\begin{matrix}
v_{\mathrm{true}}^j + n_v^j\\
\theta_{\mathrm{true}}^j + n_\theta^j
\end{matrix}
Low Cost Sensor
\begin{matrix}
v_{\mathrm{true}}^k + n^k_v\\
\theta_{\mathrm{true}}^k + n^k_\theta + \overline{\theta}_k
\end{matrix}
Low Cost Sensor
\begin{matrix}
v_{\mathrm{true}}^\ell + n^\ell_v\\
\theta_{\mathrm{true}}^\ell + n^\ell_\theta + \overline{\theta}_\ell
\end{matrix}
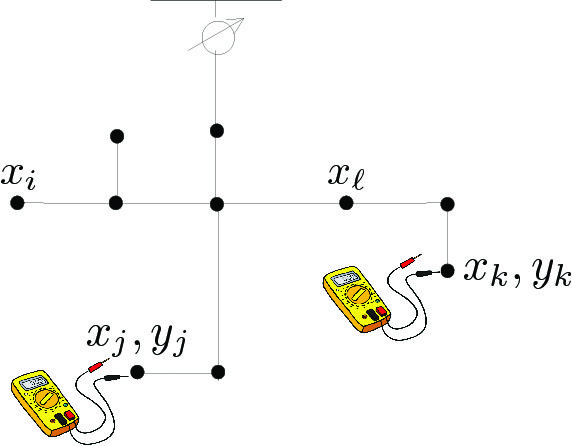
Low Cost Sensors clock affected by systematic (constant) sync error
Compensation by leveraging on error model
\overline{\theta}
Problem Formulation
Measurement model (at time instant t)
y(t) = Hx(t) + w + e(t)
where
- y, measurement
- x, state
- H, meas. matrix
- w, offset error (constant over time)
- e, random noise ~
\mathcal{N}(0,\sigma^2)
Collecting a series of measurements (from t to t+T)
Y = HX + w \mathbb{1}^T + E
Then,
\min_{X,w} \| w \| + \| Y - HX - w\mathbb{1}^T\|_R
s.t.\ \ AX = B
(linearized power flow model)
Solver/Solution characteristics
1. Scalable: possibility to easily adapt the solution to networks changing in size
2. Recursive: capability to adapt the solution as new measurements arrive (on-line)
3. Low Communication Requirements: minimum exchange of information needed in order to perform the compensation
What do we need?
A concrete and consistent measurement model
the closer the model* to the reality the better and reliable the calibration
Real data to test the algorithm
validate the effectiveness of the algorithm for its practical implementation
*blind calibration needs reliable model
Algorithm Structure
Collect data
Data cleaning and processing
Offset estimation
(Error model)
Go to
state estimation
&
control
Sensors Calibration
Logs & statistical report

Sensor calibration and synchronization
By marco todescato
Sensor calibration and synchronization
Presentation to briefly present issues and approach to sensor calibration