Sistemas Ciberfísicos
Marcus Vinícius Leal de Carvalho
Orientador: Leopoldo Rideki Yoshioka

Apresentação
Formação
Gradução:
Engenharia Industrial Mecânica (UTFPr)
Mestrado:
Engenharia e Ciências Mecânicas (UFSC) + Sanduíche (THI)
Doutorado:
Engenharia em Sistemas Eletrônicos (Poli-USP)
TCC: Ascensor Mecânico

Figura 1: Dispositivo Eletropneumático para suspender veículo para troca de pneus e trava de segurança
Link: https://www.youtube.com/watch?v=oEjtLe6psjQ
Mestrado:
Ênfase em Robótica e Computação (Software)
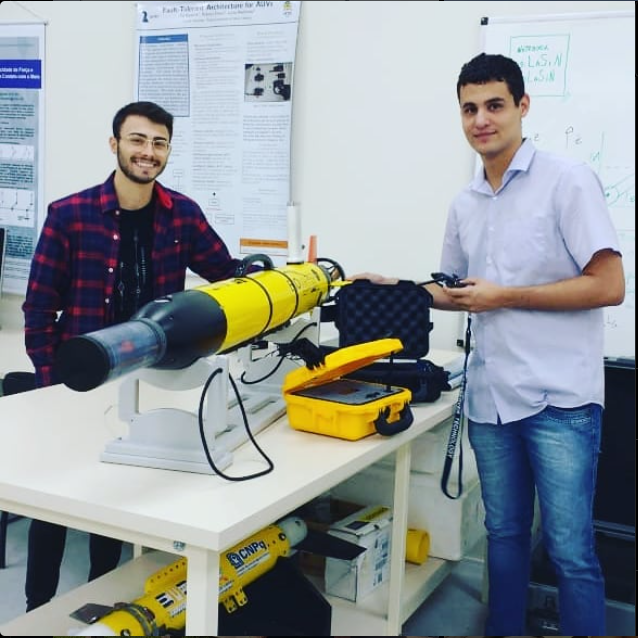
Link: https://www.youtube.com/shorts/oTQ9vlIiVMg
Sanduíche: THI Alemanha
Ênfase Veículos autônomos + ROS

Figura 3: Simulação de veículos autônomos usando ROS
Link: https://www.youtube.com/watch?v=BcCOudHdc60
Expectativa com a Disciplina
Integração de Sistemas Ciberfísicos: Aprender a integrar componentes físicos e sistemas computacionais, transformando conceitos teóricos em aplicações práticas.
Interdisciplinaridade: Buscar colaborações com outros alunos para complementar conhecimentos, especialmente na área de eletrônica.
Suprir Lacunas na Formação: Reconhecimento do gap em eletrônica e desejo de aprofundar-se nessa área para melhor integração com robótica.
Projeto Proposto Para a Disciplina
Título: "Robô Coletor Autônomo"
Descrição:
Robô impresso em 3D, equipado com um braço mecânico antropomórfico, capaz de coletar brinquedos e/ou resíduos (como cocô de cachorro).
Funcionalidades:
- Navegação autônoma.
- Detecção de Objetos Especifícos por Machine Learning
- Planejamento de movimento do braço.
- Coleta e armazenamento de objetos em uma sacola.
Aplicações:
Limpeza de ambientes, coleta de brinquedos, remoção de resíduos de animais.



Objetivos Especifícos
Prototipagem: Transcender a simulação e trabalhar com robôs reais, mesmo que em formato de protótipo.
Comunicação entre Veículos: Embora seja um tópico de interesse, deixar como segundo plano a comunicação wireless entre veículos.
Integração Voz-Robô com ChatGPT: Explorar a possibilidade de usar a API do ChatGPT para converter comandos de voz, como "siga reto" ou "gira à esquerda", em comandos de velocidade no ROS, permitindo o controle direto do robô. Esse processo visa criar uma interface de Internet das Coisas (IoT) potencializada por Inteligência Artificial, proporcionando uma interação mais intuitiva e dinâmica com o robô.
Perspectivas Empreendedoras
Startup do Robô Coletor: Explorar a viabilidade de transformar o projeto do robô coletor em uma startup, identificando potenciais mercados e aplicações.
Integração em Grupos Existentes: Considerar a possibilidade de se juntar a startups ou grupos já estabelecidos na área de robótica para complementar renda e expandir conhecimentos.
Valor Agregado: Enfatizar o diferencial do robô coletor e como ele pode atender a necessidades específicas do mercado, gerando valor e inovação.
Conclusão
Aplicação Prática: Utilizar o aprendizado da disciplina para aplicar de forma prática tudo o que foi aprendido anteriormente, especialmente em ROS.
Colaboração: Buscar parcerias e colaborações para enriquecer o projeto e alcançar resultados mais robustos e integrados.
Monetização do Projeto: Explorar oportunidades de mercado para o robô coletor, avaliando seu potencial comercial e identificando estratégias para gerar receita a partir de sua implementação e venda.


Roupa eletrônica de Nitinol + LEDs Sustentável e Ecológica
FIM do XX MOUSE XX
Tela Interativa de Notebook
Outras Idéias
Sistemas Ciberfisicos
By Marcus Vinícius Leal de Carvalho

