





















Cserép Máté
I am a researcher and lecturer in computer science with several years of experience in object-oriented design and development. I have an application development experience primarily in C++, the C#/.NET technologies, PHP and Python.
Cserép Máté
Budapest, 2020. május 5.
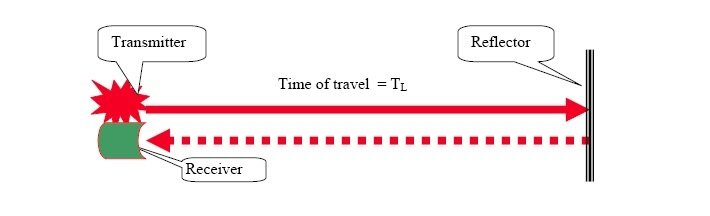
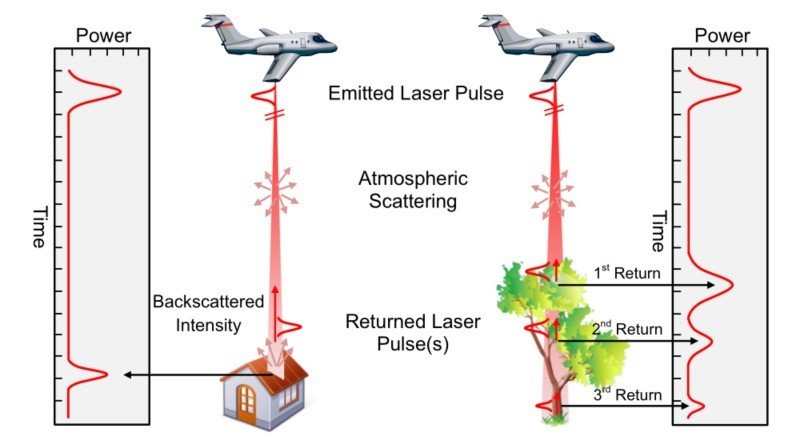
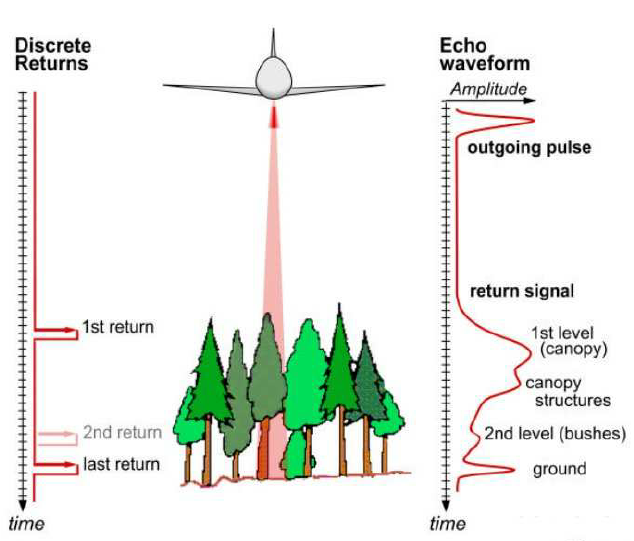
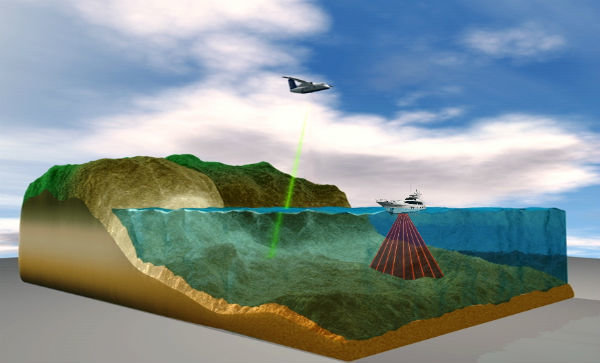
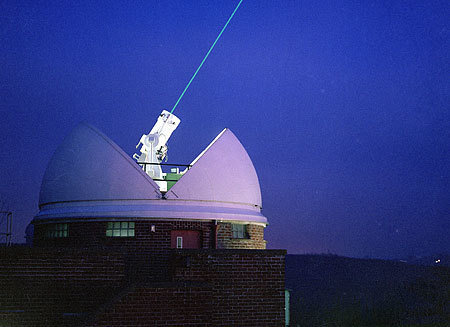
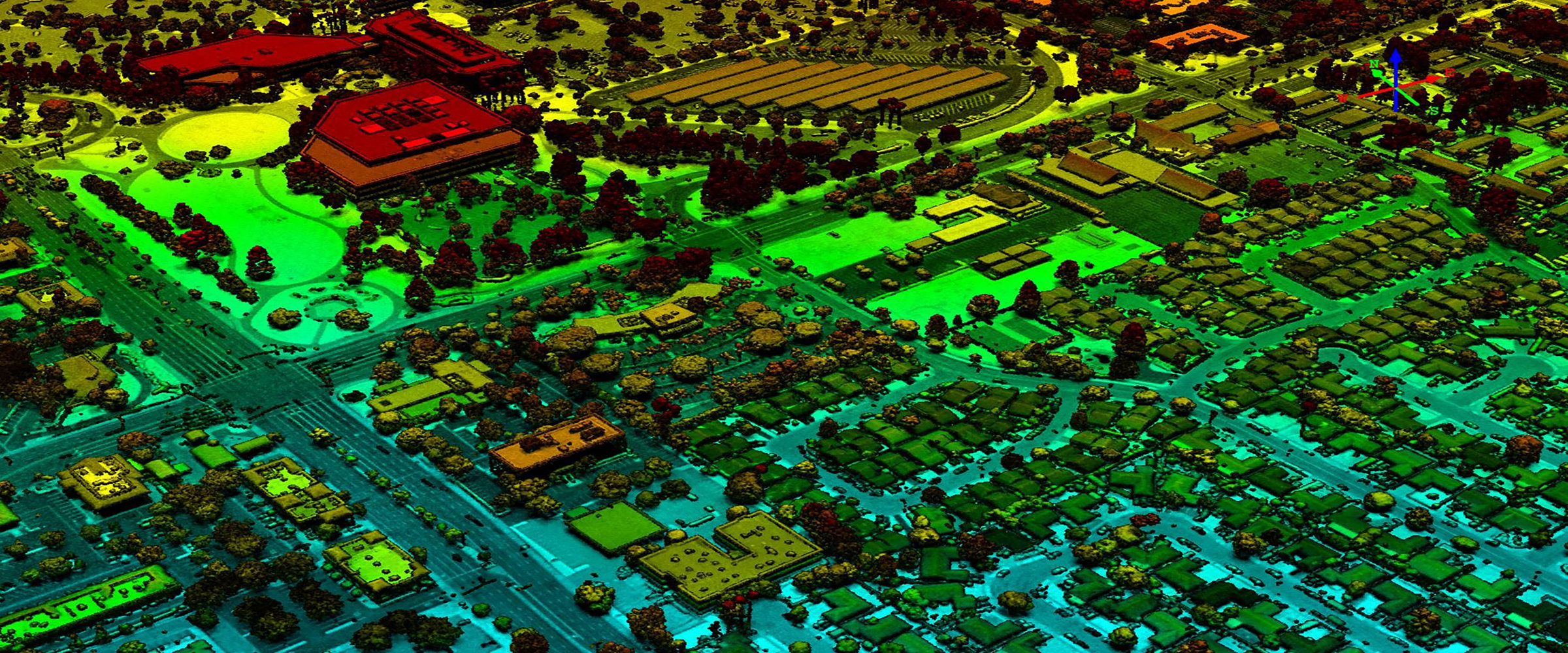
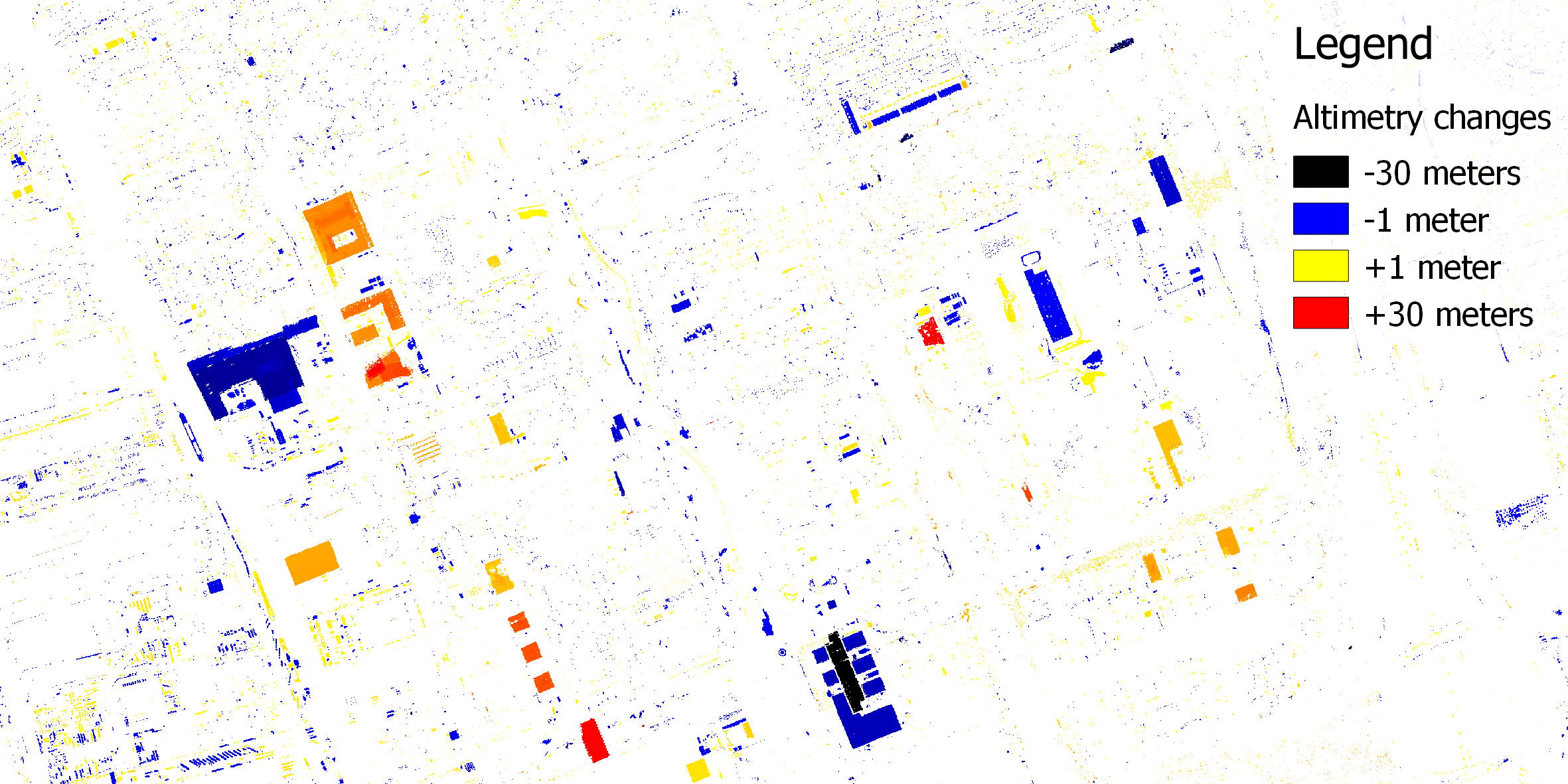
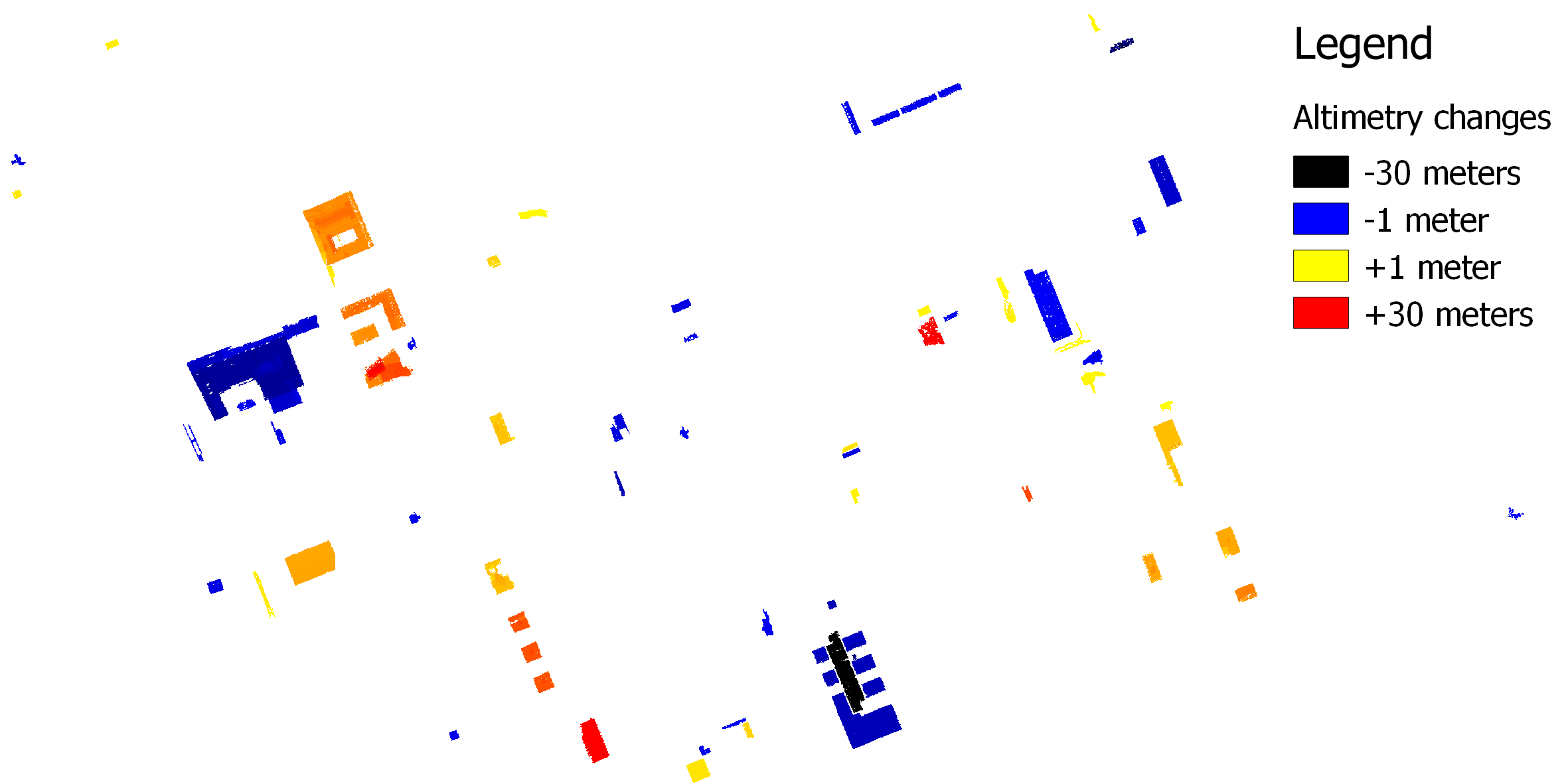
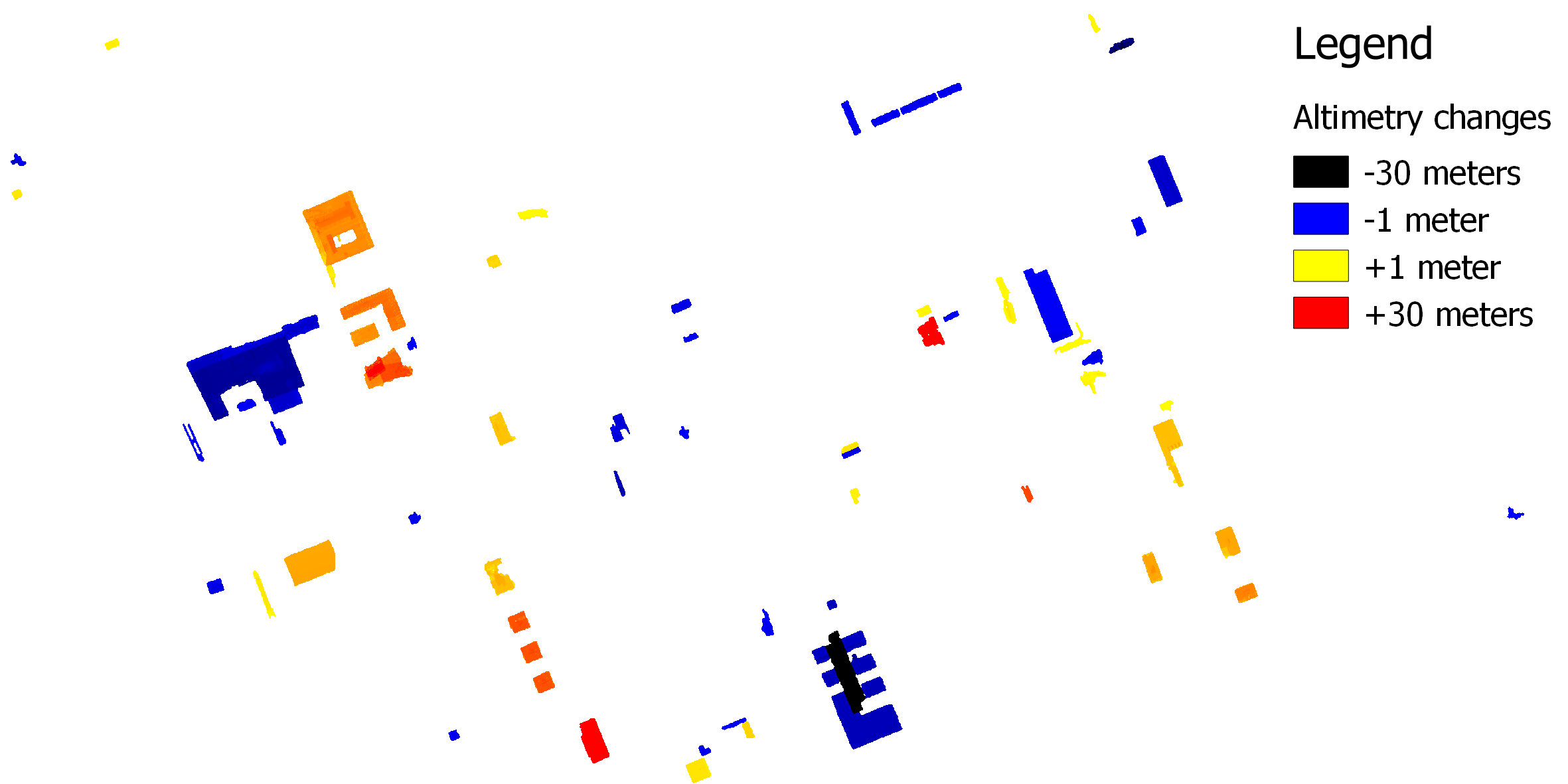
LiDAR = Light Detection and Ranging
Lézer alapú távérzékelés
Tipikus technikai jellemzők napjainkban:
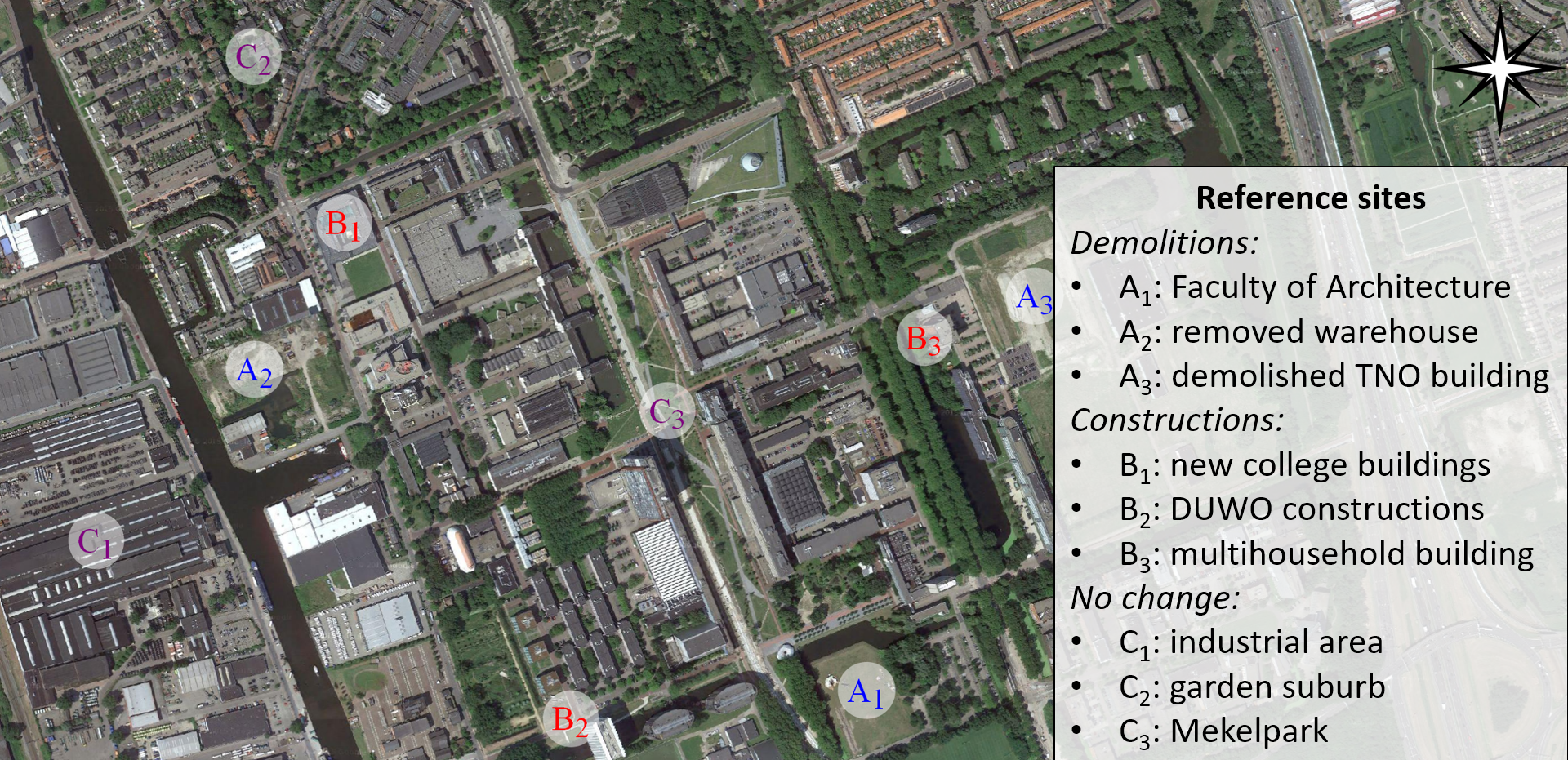
Partnerek: TU Delft, NWO (Dutch Research Council)
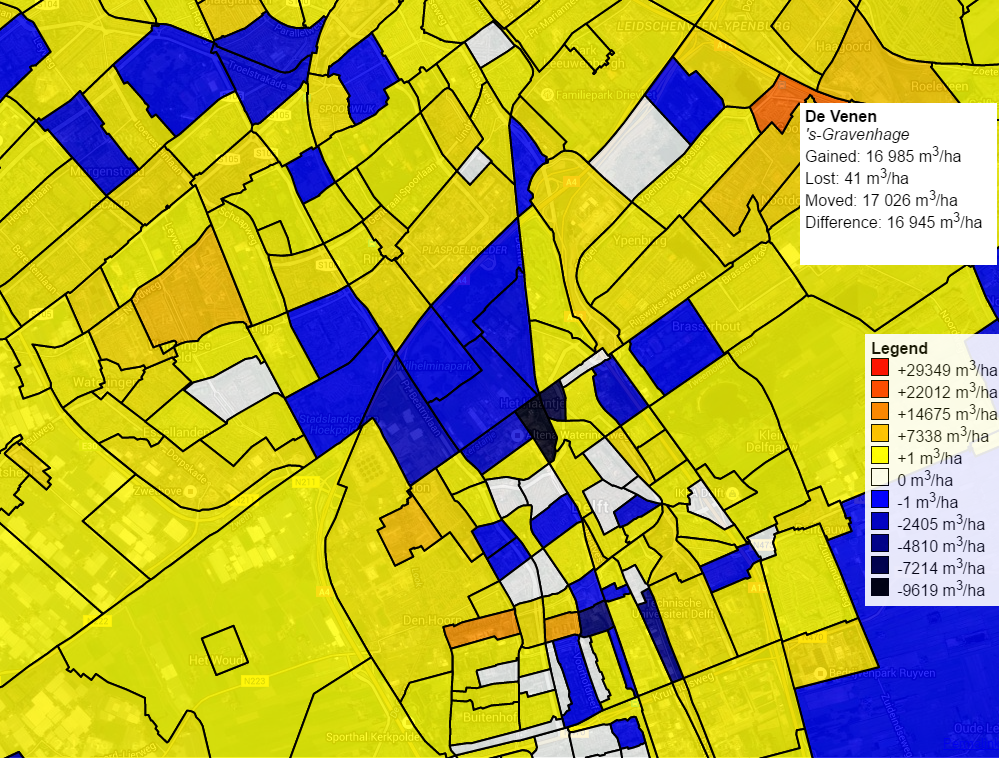
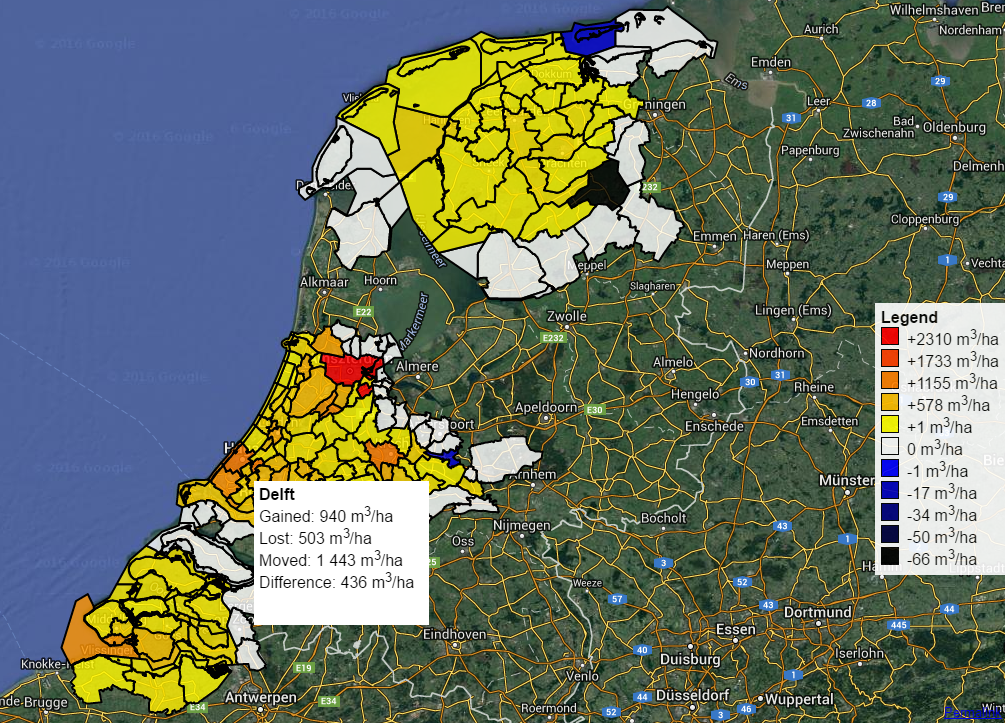
AHN: Actueel Hoogtebestand Nederland,
angolul: Current Dutch Elevation
Nemzeti lefedettség
Kb. 40.000 km2, 1372 csempén
Átlagos pontsűrűség: 10 pont / m2
Vertikális hibahatár: 0.2 m (az adatok 99.7%-ára)
426 csempére (31%)
Hagyományos asztali számítógépen
8 CPU core, 12GB RAM
4 szál (I/O bottleneck)
kb. 2 nap a teljes futási idő
csempék feldolgozása, aggregáció,
vizualizáció előállítása
SURFsara LISA holland nemzeti szuperszámítógép
489 node, 7856 CPU core, 149 TFlop/s csúcsteljesítmény
10-20 node használata, 100-200 szállal
A teljes feldolgozási idő 30 perc alatt
Fekete Anett TDK dolgozata (2019, II. díj)
Pitlik Mátyás TDK dolgozata (2019, III. díj)
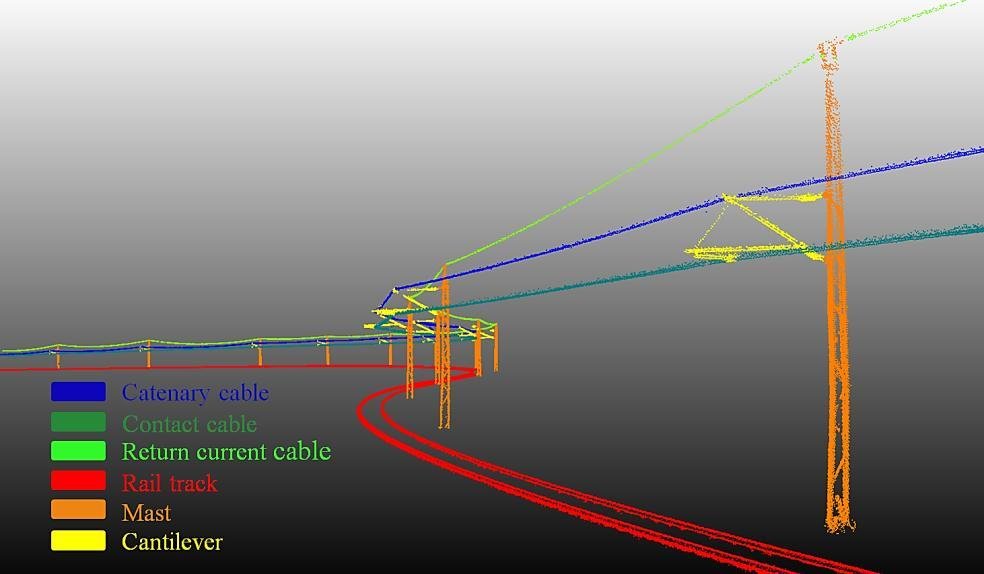
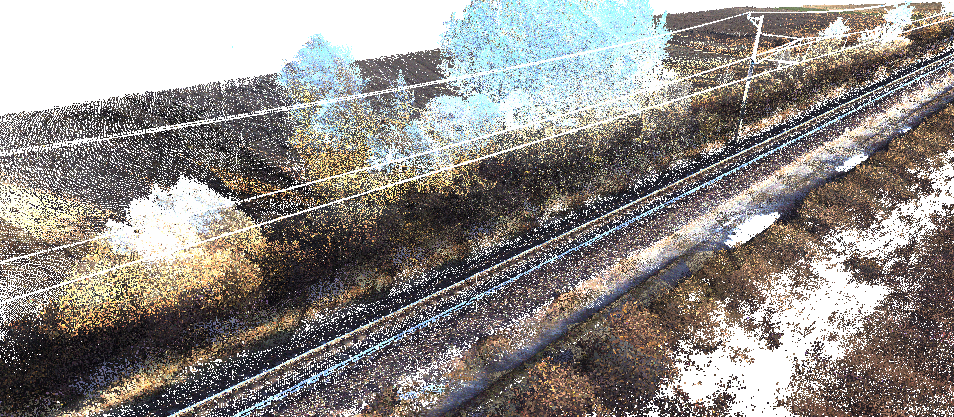
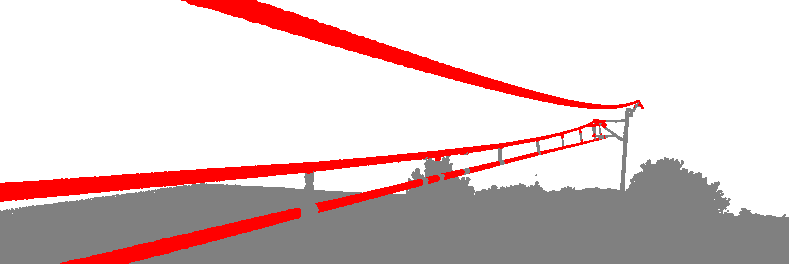
Partner: Magyar Államvasutak
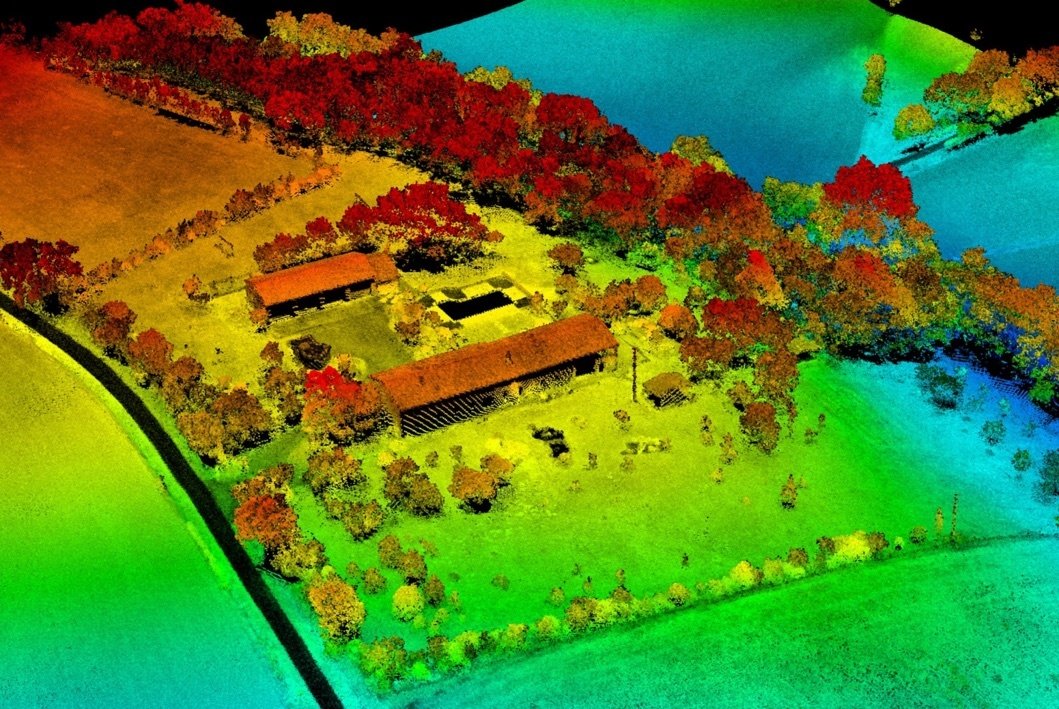
By Cserép Máté
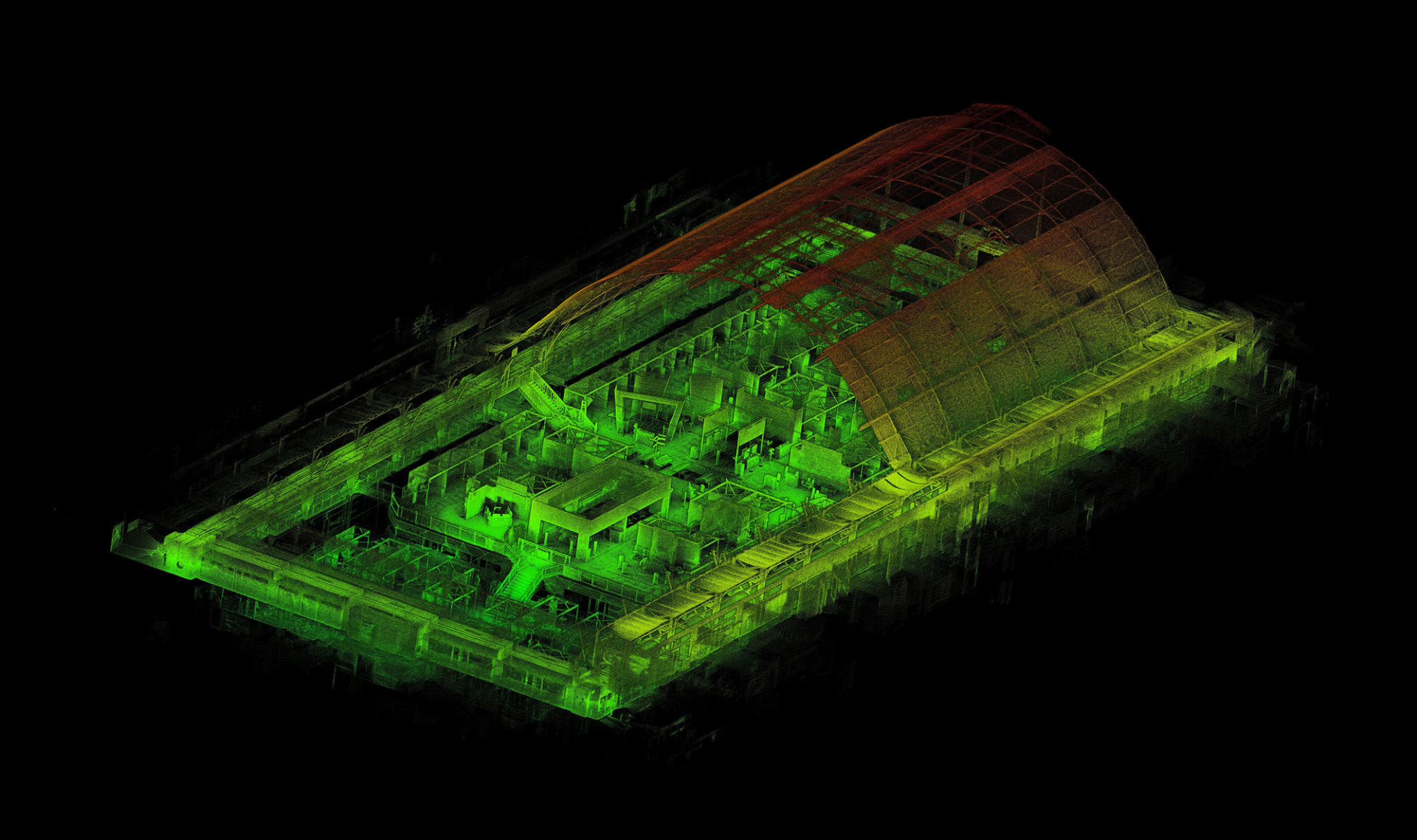
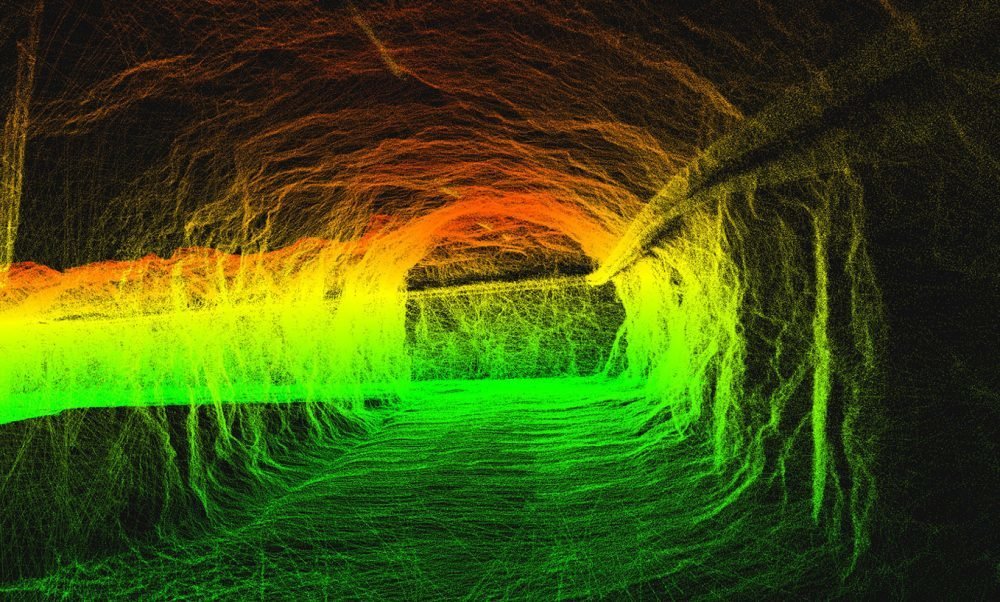
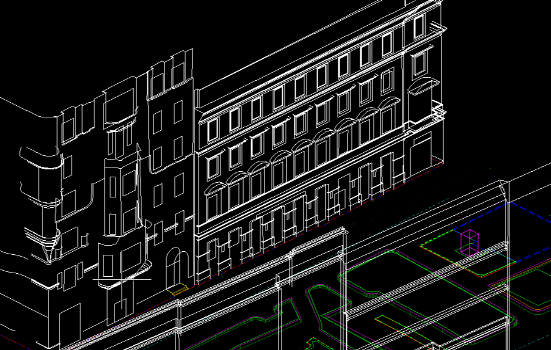
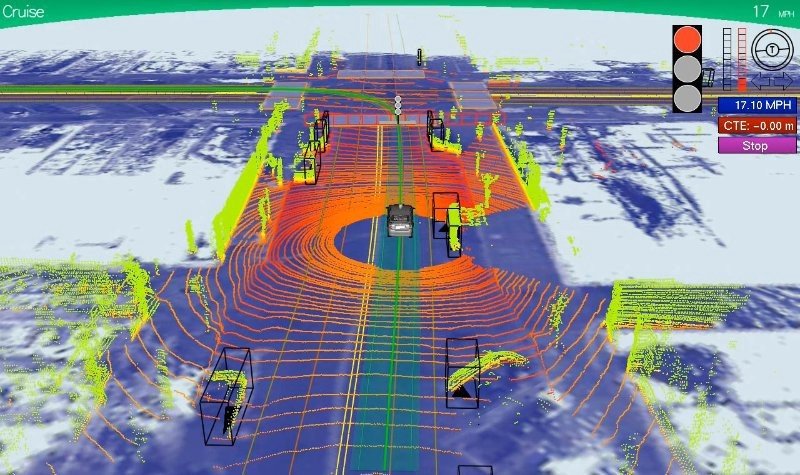
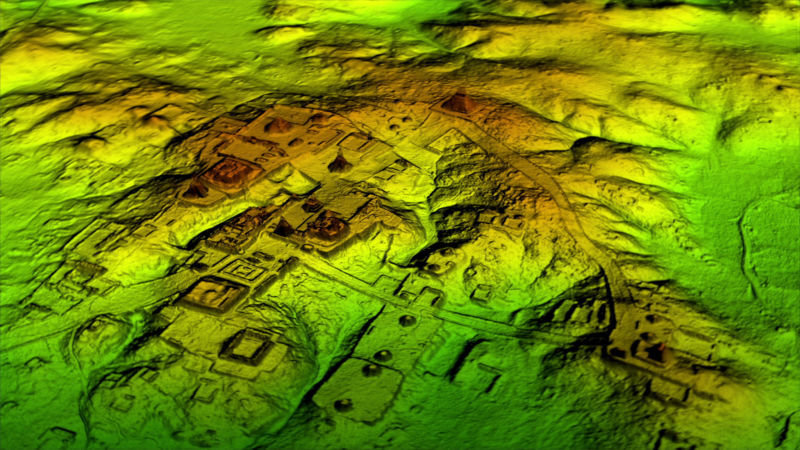
A LiDAR (Light Detection and Ranging) technológia egyre elterjedtebbé válásával korábban elérhetetlen részletességű és pontosságú 3 dimenziós modellt alkothatunk környezetünkről, a hagyományos térinformatikai valamint (építész)mérnöki felhasználás mellett utat törve számos további alkalmazási területre: a várostervezéstől és a közlekedési infrastruktúra ellenőrzésétől az önvezető járműveken és a kiterjesztett valóságon át egészen a katasztrófamenedzsmentig. A szenzorok által előállított hatalmas adatmennyiség tárolása, kezelése és feldolgozása azonban az informatikai tudományterületet és a programozókat is kihívások és még megoldatlan problémák elé állítják.




