Generalization Dynamics of Linear Diffusion Models
Claudia Merger, Sebastian Goldt
first Workshop on Principles of Generative Models
07.12.2025
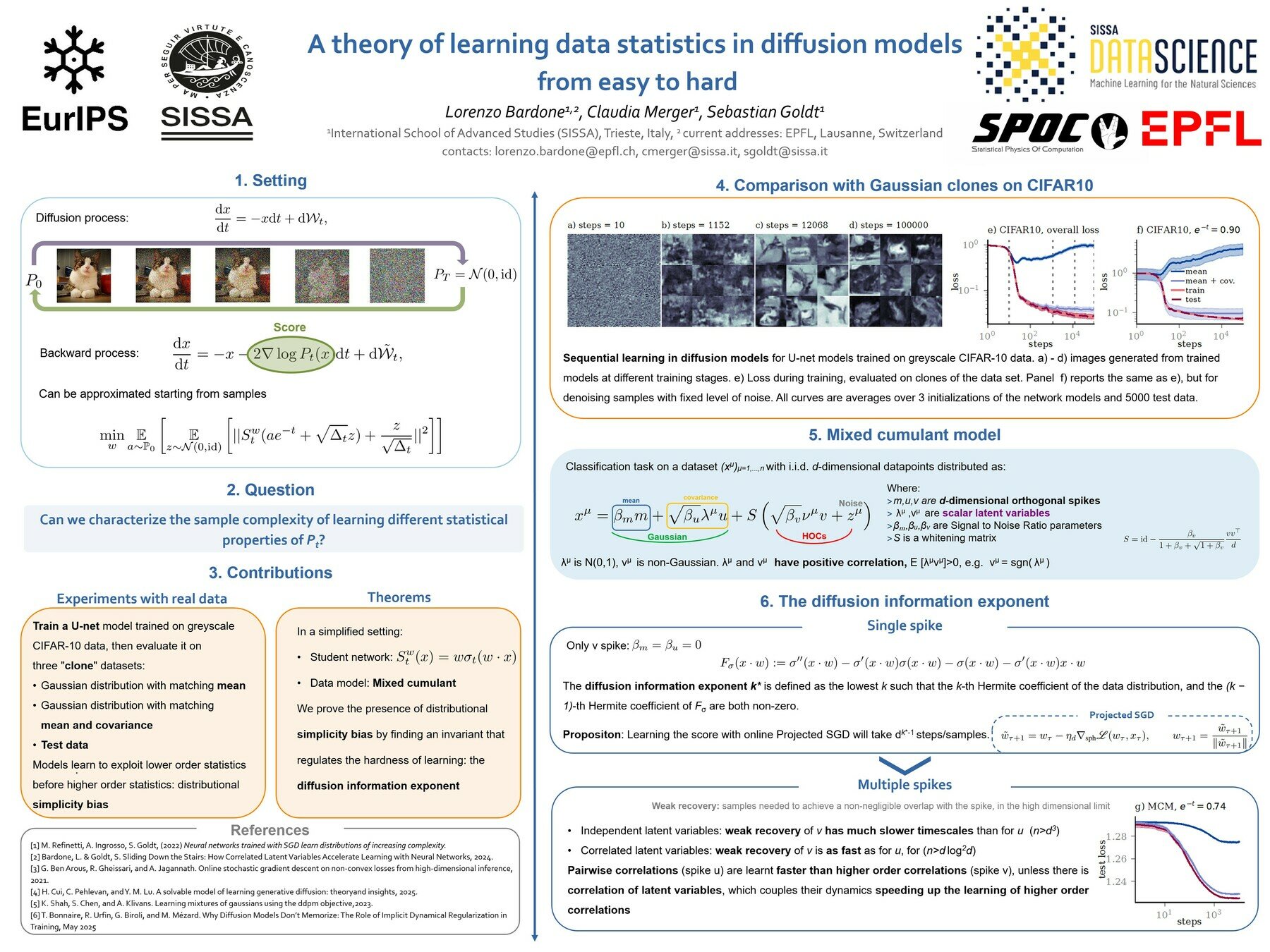
What are diffusion models?
Task: Given some data \( \mathcal{D} \) from an unknown distribution \( p \)
Generate \( x \sim p \)

"happy data scientist"
"summer in Trieste"
"intelligent bamboo"




Sohl-Dickstein, et al., ‘Deep Unsupervised Learning Using Nonequilibrium Thermodynamics’.
Song, Yang, and Stefano Ermon. ‘Generative Modeling by Estimating Gradients of the Data Distribution’,2020
Ho, et al. ‘Denoising Diffusion Probabilistic Models’, 2020
\text{noising process: }
x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1 - \bar{\alpha}_t} \epsilon, \quad \epsilon \sim \mathcal{N} (0,\mathbb{1})

x_0 = \sqrt{\Sigma_0} \epsilon_T +\mu_0
x_0
\epsilon_T
Diffusion models reverse the noising process.
train model \( \epsilon_{\theta} \) to predict noise:
\(L= \sum_t \bigg\langle||\epsilon -\epsilon_{\theta} \left(x_t,t\right) ||^2 \bigg\rangle_{\epsilon, x_0} \)
How do diffusion models learn to sample?
Sohl-Dickstein, et al., ‘Deep Unsupervised Learning Using Nonequilibrium Thermodynamics’.
Song, Yang, and Stefano Ermon. ‘Generative Modeling by Estimating Gradients of the Data Distribution’,2020
Ho, et al. ‘Denoising Diffusion Probabilistic Models’, 2020
How much data, \(N\)?
Conventionally: \( N\sim \exp(\alpha d) \)
Dynamic regularization (sampling) and early stopping (training) bias
"Generalization"
"Memorization"


Kadkhodaie, Z. et. al. Generalization in Diffusion Models Arises from Geometry-Adaptive Harmonic Representations’. April 2024.
= Global minimum of the training loss
increasing \(N\)
Biroli et al. 2024. Nature Communications,
George et. al. 2025. arXiv.2502.04339.
George et al. 2025 arXiv.2502.00336.
Bonnaire et. al. 2025. arXiv.2505.17638.
Biroli, Mezard, 2023, Journal of Statistical Mechanics, Theory and Experiment
How much data, \(N\)?
Conventionally: \( N\sim \exp(\alpha d) \)
data structure?
"Generalization"
"Memorization"
= Global minimum of the training loss
increasing \(N\)
Can data structure help us learn?

Eigenvalues of \( \Sigma \): \(\lambda_{\nu}\propto \nu^{-k}, \quad \text{Tr}\Sigma=const. \)
\(\rightarrow \, k\) controls hierachy
Population loss: Wang & Pehlevan, NeurIPS 2025
\(\rightarrow \) What happens at finite \(N\)?
Can data structure help us learn?
Data drawn from
\(\rho = \mathcal{N} \left( \mu,\Sigma \right) \)
\( \mu_0,\Sigma_0 = \) empirical mean and covariance of training data \( \neq \mu, \Sigma \)
\(\rightarrow\) Fully tractable model: Linear diffusion models*


Linear models learn:
\(\rho_{N} \approx \mathcal{N} \left( \mu_0,\Sigma_0 +c\text{Id}\right) \)
\(L= \sum_t \bigg\langle||\epsilon -\epsilon_{\theta} \left(x_t,t\right) ||^2 \bigg\rangle_{\epsilon, x_0} \)
\(\epsilon_{\theta} \left(x_t,t\right)=W_t(x_t+b_t) \)
Eigenvalues of \( \Sigma \): \(\lambda_{\nu}\propto \nu^{-k}, \quad \text{Tr}\Sigma=const. \)
Linear models: Generalization with \(N\)
test loss \( \sim \text{Tr}\frac{ \Sigma -\Sigma_0}{\left(\Sigma_0 + c\text{Id} \right)^2} +const. \)
find \(d-N\) directions \(\nu\) where \( \Sigma_0 e_{\nu} = 0\)
\(\Rightarrow \) test loss \( \gtrsim \sum_{\nu} \frac{ \Sigma_{\nu,\nu}}{c^2} \)
\( \rightarrow \) nullspace of \( \Sigma_0 \) drives overfitting
Kullback-Leibler divergence
\( \text{DKL} (\rho_N| \rho) \sim \ln \frac{\left| \Sigma \right|}{\left| \Sigma_0 + c \text{Id} \right|} \)
Linear models: Generalization with \(N\)
\( \rightarrow \) nullspace of \( \Sigma_0 \) drives overfitting
\( \rightarrow \) Stronger hierarchy in data improves performance at fixed \(N\)
test loss \( \sim \text{Tr}\frac{ \Sigma -\Sigma_0}{\left(\Sigma_0 + c\text{Id} \right)^2} +const. \)
Impact of data structure
Eigenvalues of \( \Sigma \): \(\lambda_{\nu}\propto \nu^{-k}, \quad \text{Tr}\Sigma=const. \)
Kullback-Leibler divergence \( \text{DKL} (\rho_N| \rho) \sim \ln \frac{\left| \Sigma \right|}{\left| \Sigma_0 + c \text{Id} \right|} \)
Learning dynamics

Weights exponentially relax with rate \( \propto \bar{\alpha_{t}}\lambda_{\nu}^{0}+1-\bar{\alpha}_{t}\)
\( \lambda^0_{\nu} =0 \rightarrow \) slower learning
More hierarchical \( \Sigma \rightarrow \) slower learning, less severe overfitting
regularization \(c\):
minimal scale of variability
Linear models learn:
\(\rho_{N} \approx \mathcal{N} \left( \mu_0,\Sigma_0 +c\text{Id}\right) \)
\(\rightarrow \) mitigates overfitting
Conclusion
Assumption: Linear models & Gaussian Data
Two regimes:
\( N <d \): Nullspace of \(\Sigma_0 \) drives overfitting, data hierarchy is beneficial
\(N>d\): \(\text{DKL}\) decays with \(d/(4N)\) irrespective of structure
Effective measures to prevent overfitting when, \( N \ll d \)?
\(\rightarrow \) Early stopping & regularization
Higher order statistics? Check out Lorenzo's poster!

Learning dynamics?
Comparison to reference
\Delta \epsilon_N = \frac{1}{T} \sum_t
\left\langle||\epsilon_{N} (x^{\text{test}}) - \epsilon_{\infty} (x^{\text{test}})_t) ||^2\,\right\rangle_{(x^{\text{test}})},


Non-linear vs. Linear
d_{t,\nu} = \frac{\left(\epsilon^N\left(x_t,t\right)
-\epsilon_{\infty}^*\left(x_t,t\right) \right)^2_{\nu}
}{\left| \left(\epsilon^N\left(x_t,t\right)+\eta
\right)_{\nu}
\left( \epsilon_{\infty}^*\left(x_t,t\right)+\eta
\right)_{\nu} \right|}
CIFAR-10
CelebA

Images have a highly structured covariance


Not enough to span the space of faces!
naive solution: \( \frac{||\Sigma - \Sigma_0||_F^2}{||\Sigma||_F^2}\rightarrow \frac{d_{\text{effective}}}{N}\)
CelebA: \( d_{\text{effective}}\approx 7 \)
MNIST: \( d_{\text{effective}}\approx 25 \)
EURIPS talk 2025
By merger




