Bibit Bianchini
Research Overview


Building and Leveraging Models in
Contact-Rich Scenarios
Building and Leveraging Models in
Contact-Rich Scenarios
[Bianchini*, Zhu*, Sun, Jiang, Taylor, Posa, Vysics, RSS 2025]
[Bianchini*, Zhu*, Sun, Jiang, Taylor, Posa, Vysics, RSS 2025]
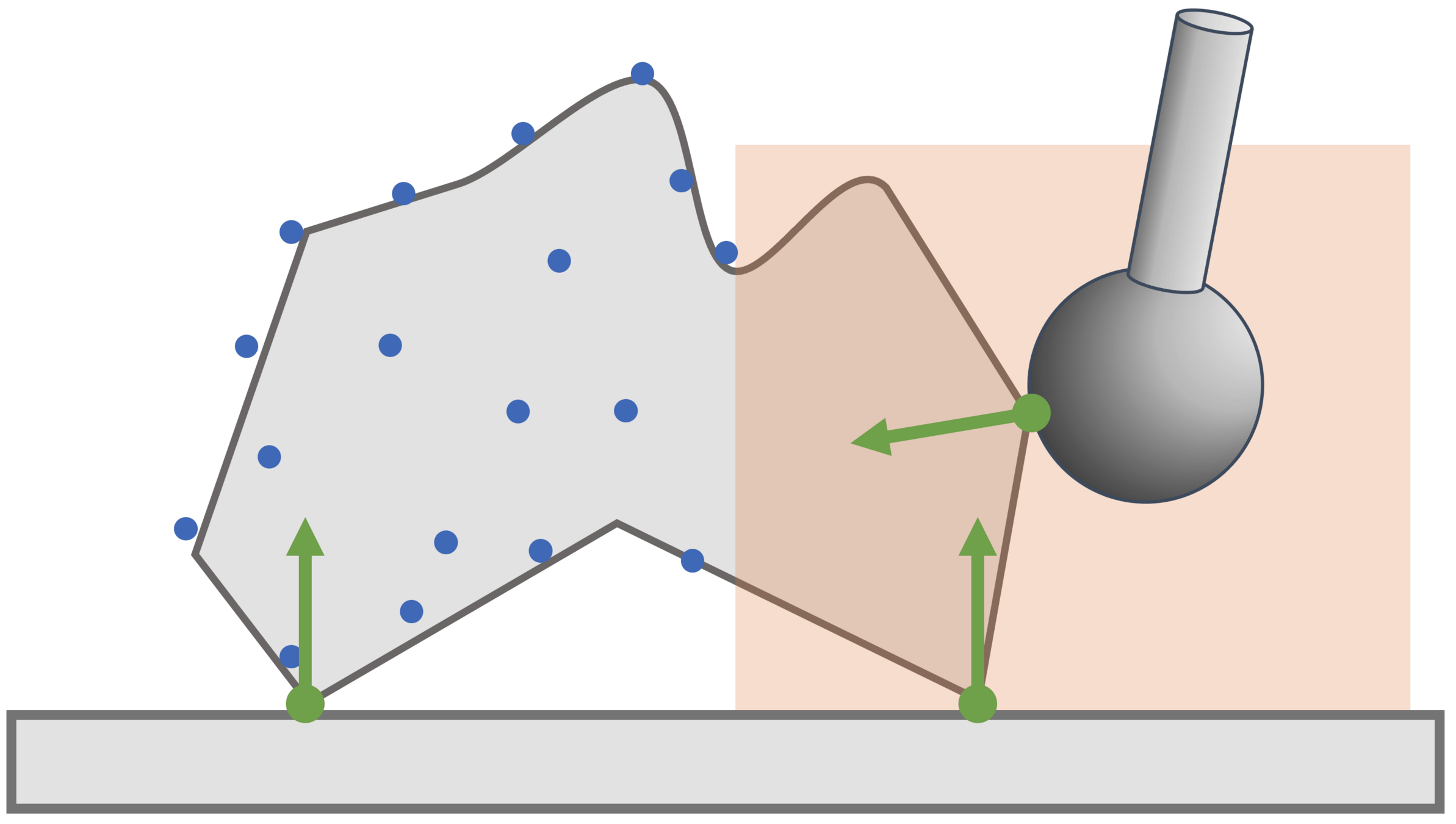
Supervising geometry from two information sources:
From vision: dense, affected by occlusion
From physics: sparse, can be hypothesized anywhere
known environment
known robot location
visual occlusion
Building and Leveraging Models in
Contact-Rich Scenarios
Vysics
[Bianchini*, Zhu*, et al 2025]
Building and Leveraging Models in
Contact-Rich Scenarios
BundleSDF
[Wen, et al 2023]
PLL
[Bianchini, Halm, Posa 2023]
[Pfrommer*, Halm*, Posa 2020]
"Ground Truth" simulation
geometry
overlay
open-loop
simulation
Building and Leveraging Models in
Contact-Rich Scenarios
SE(3) manipulation
planar manipulation
[Venkatesh*, Bianchini*, Aydinoglu, Yang, Posa, Approximating Global CI-MPC..., under review]
Desired controller properties:
- contact-implicit
- real-time
- globally effective
At every control loop, our algorithm does:
- Sample starting locations for our robot.
- Compute local CI-MPC plan from each location.
- Choose whether to run CI-MPC now or move elsewhere.
DAIR Lab tour (Bibit)
By Michael Posa
DAIR Lab tour (Bibit)
June 12, 2025 Lab Showcase for Active Tactile Exploration Project




