Lección 2: Sistemas SISO LTI en el dominio de la frecuencia
BE3024 - Sistemas de Control 1 (Biomédica)
2do ciclo, 2024
¿Por qué?
+
-
referencia
planta
sensor
controlador
salida
retroalimentación negativa
+
-
referencia
planta
sensor
controlador
salida
retroalimentación negativa
entrada
\mathcal{G}
u(t)
y(t)
=\mathcal{G}\left\{u(t)\right\}
+
-
referencia
planta
sensor
controlador
salida
retroalimentación negativa
entrada
\mathcal{G}
u(t)
y(t)
=\mathcal{G}\left\{u(t)\right\}
sistema SISO LTI
¿Qué implica esto?
TODO sistema LTI puede expresarse como una EDO lineal de coeficientes constantes que relaciona a su salida con su entrada.
Ejemplo
u(t)
y(t)
\ddot{y}+8\dot{y}+12y=10u
\mathcal{G}
LTI \(\Rightarrow\) EDO lineal con coeficientes constantes
una entrada y una salida \(\Rightarrow\) SISO
(single input single output)
Los sistemas LTI presentan respuestas típicas a señales "estándar".
\mathcal{G}
u(t)
y(t)
señal (de prueba) estándar
respuesta típica
escalón
impulso
Escalón unitario
\mathcal{G}
u(t)
y(t)
respuesta al escalón
\mathbf{1}(t)=\begin{cases} 0 & \text{ si } t<0 \\ 1 & \text{ si } t\ge0 \end{cases}
t
\mathbf{1}(t)
Impulso unitario | delta de Dirac
\mathcal{G}
u(t)
y(t)
respuesta impulsional
\delta(t)=\begin{cases} ``\infty" & \text{ si } t=0 \\ 0 & \text{ si } t\ne0 \end{cases}
t
\delta(t)
g(t)
y(t)=\displaystyle\int_{-\infty}^{\infty}u(\tau)g(t-\tau)d\tau \equiv u(t) * g(t)
Respuesta en el tiempo de un sistema LTI (convolución):
Y(s)=G(s)U(s)
Respuesta de un sistema LTI (Laplace):
G(s)=\dfrac{Y(s)}{U(s)}
Función de transferencia:
G(s)
u(t)
y(t)=\mathcal{G}\left\{u(t)\right\}
planta
entrada
salida
U(s)
Y(s)=G(s)U(s)
Continuando con el ejemplo
¿Cuál es la respuesta en el tiempo del sistema si la entrada es el escalón unitario?
\ddot{y}+8\dot{y}+12y=10u
¿Cuál es la función de transferencia del sistema?
u(t)
y(t)
\dfrac{10}{s^2+8s+12}
y(t)=\left( \dfrac{5}{6}-\dfrac{5}{4}e^{-2t}+\dfrac{5}{12}e^{-6t}\right)\mathbf{1}(t)
Función de transferencia
Respuesta al escalón
u(t)
y(t)
\dfrac{10}{s^2+8s+12}
Análisis en Matlab
G = tf(10, [1, 8, 12])
step(G); % Respuesta al escalón
impulse(G); % Respuesta impulsional
linearSystemAnalyzer(G); % Permite
% hacer varios análisisejemplo_analisis.m
u(t) \\
=e^{-t}
y(t)
\dfrac{10}{s^2+8s+12}
¿Y si quisiéramos la respuesta a otra entrada?
t = 0:0.01:5;
u = exp(-t);
lsim(G, u, t);¿Qué ocurre al interconectar múltiples sistemas?
+
-
C(s)
G(s)
H(s)
R(s)
Y(s)
sensor
controlador
planta
salida
referencia
diagramas de bloques
Reflejo de estiramiento muscular
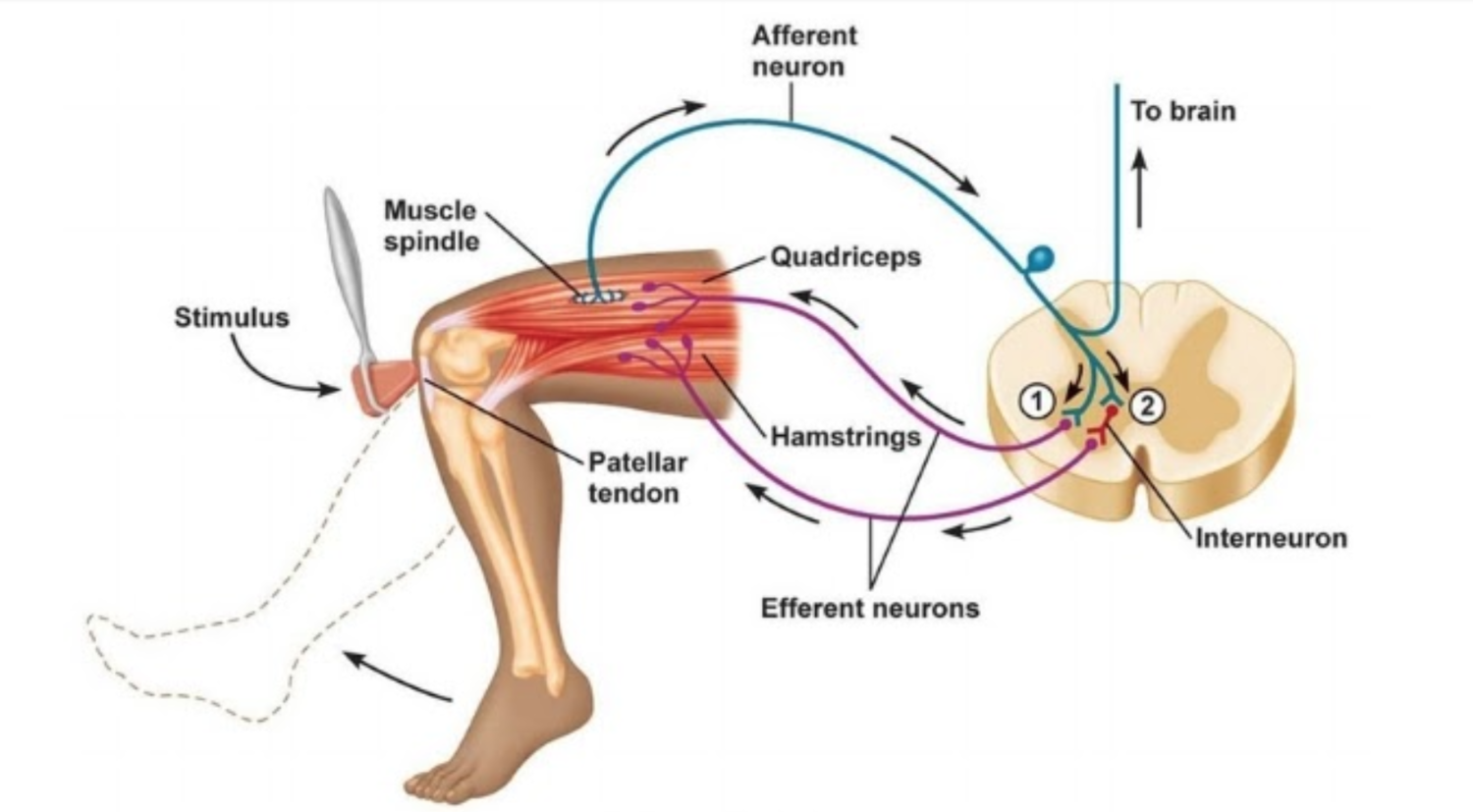
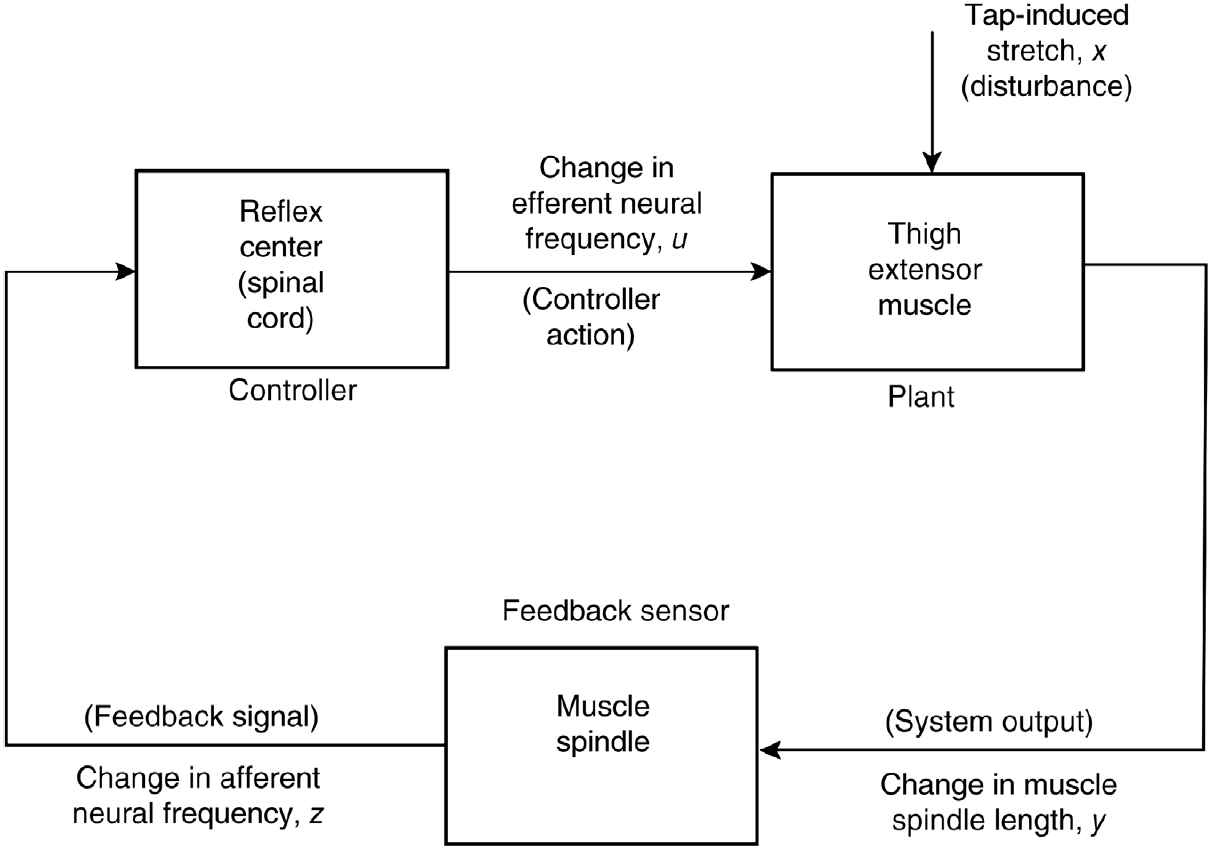
\(\big\uparrow\) representación real e intuición
\(\big\downarrow\) facilidad de análisis
diagramas de bloques
¿Cómo retomamos la facilidad de análisis?
Álgebra de bloques
\Rightarrow
Reglas fundamentales
Conexión en serie | cascada
\equiv
G_1
G_2
U
Y
G_1G_2
U
Y
Geq = G1 * G2Conexión en paralelo
\equiv
G_1
G_2
U
Y
+
G_1+G_2
U
Y
Geq = G1 + G2Retroalimentación negativa
G_1
U
Y
+
G_2
-
\equiv
Geq = feedback(G1, G2)\dfrac{G_1}{1+G_1G_2}
U
Y
¿Puede demostrarlo?
10
R
Y
+
-
\frac{1}{s}
\frac{100}{s+10}
k
+
-
Ejemplo: Encuentre el equivalente en lazo abierto del siguiente diagrama de bloques.
R
Y
\dfrac{1000k}{s^2+10s+100(1+10k)}
R
Y
\dfrac{1000k}{s^2+10s+100(1+10k)}
Simplificación y análisis en Matlab (Control Systems Toolbox)
ejemplo_bloques.m
10
R
Y
+
-
\frac{1}{s}
\frac{100}{s+10}
k
+
-
+
-
C(s)
G(s)
H(s)
R(s)
Y(s)
sensor
controlador
planta
salida
referencia
Regresando al lazo de control canónico
\(E(s)\)
error
\(U(s)\)
Equivalente en lazo abierto
R(s)
Y(s)
\dfrac{C(s)G(s)}{1+C(s)G(s)H(s)}
\equiv
T(s)
=T(s)R(s)
BE3024 - Lecture 2 (2024)
By Miguel Enrique Zea Arenales



