Cinemática de cuerpos rígidos
BE3027 - Robótica Médica

¿Por qué?
{^I}\mathbf{T}_B=
\begin{bmatrix} {^I}\mathbf{R}_B & {^I}\mathbf{o}_B \\ \mathbf{0} & 1 \end{bmatrix}
¿Qué es la transformación homogénea?
{^I}\mathbf{T}_B=
\begin{bmatrix} {^I}\mathbf{R}_B & {^I}\mathbf{o}_B \\ \mathbf{0} & 1 \end{bmatrix}
matriz de rotación
orientación de \(\{B\}\) con respecto a \(\{I\}\)
vectores de los ejes de coordenadas para \(\{B\}\)
{^I}\mathbf{T}_B=
\begin{bmatrix} {^I}\mathbf{R}_B & {^I}\mathbf{o}_B \\ \mathbf{0} & 1 \end{bmatrix}
vector de traslación
posición de \(\{B\}\) con respecto a \(\{I\}\)
coordenadas del origen de \(\{B\}\)
{^I}\mathbf{T}_B=
\begin{bmatrix} {^I}\mathbf{R}_B & {^I}\mathbf{o}_B \\ \mathbf{0} & 1 \end{bmatrix}
ajuste por coordenadas homogéneas
¿Coordenadas homogéneas?
{^I}\mathbf{p}={^I}\mathcal{T}_B\left\{ {^B}\mathbf{p} \right\}
\equiv {^I}\tilde{\mathbf{p}}={^I}\mathbf{T}_B {^B}\tilde{\mathbf{p}}
¿Coordenadas homogéneas?
{^I}\mathbf{p}={^I}\mathcal{T}_B\left\{ {^B}\mathbf{p} \right\}
\equiv {^I}\tilde{\mathbf{p}}={^I}\mathbf{T}_B {^B}\tilde{\mathbf{p}}
vectores en coordenadas homogéneas
\tilde{\mathbf{p}}=\begin{bmatrix} \mathbf{p} \\ 1 \end{bmatrix}
Las matrices de rotación junto con la multiplicación de matrices forman el grupo especial ortogonal
caso 2D
caso 3D
{^I}\mathbf{R}_B \in
SO(2) \subset \mathbb{R}^{2 \times 2}
SO(3) \subset \mathbb{R}^{3 \times 3}
{^I}\mathbf{R}_B {^B}\mathbf{R}_C = {^I}\mathbf{R}_C
multiplicación entre rotaciones produce rotaciones
\left({^I}\mathbf{R}_B\right)^{-1}={^I}\mathbf{R}_B^\top\equiv {^B}\mathbf{R}_I
\mathrm{det}\left({^I}\mathbf{R}_B\right)=1
son matrices ortogonales
Las matrices de transformación homogénea junto con la multiplicación de matrices forman el grupo especial euclideano
caso 2D
caso 3D
{^I}\mathbf{T}_B \in
SE(2) \subset \mathbb{R}^{3 \times 3}
SE(3) \subset \mathbb{R}^{4 \times 4}
{^I}\mathbf{T}_B {^B}\mathbf{T}_C = {^I}\mathbf{T}_C
multiplicación entre transformaciones produce transformaciones
NO son matrices ortogonales
{^B}\mathbf{T}_I \equiv \left({^I}\mathbf{T}_B\right)^{-1} =
\begin{bmatrix} {^I}\mathbf{R}_B^\top & -{^I}\mathbf{R}_B^\top {^I}\mathbf{o}_B \\ \mathbf{0} & 1 \end{bmatrix} \ne {^I}\mathbf{T}_B^\top
Cinemática de cuerpos rígidos en 2D
x
y
\{I\}
x_B
y_B
\{B\}
(x,y)
\theta
{^I}\mathbf{T}_B=\begin{bmatrix} \cos\theta & -\sin\theta & x \\ \sin\theta & \cos\theta & y \\ 0 & 0 & 1 \end{bmatrix}
3 grados de libertad
\in \mathbb{R}^{3 \times 3}
IT_B = [ cos(theta), -sin(theta), x;
sin(theta), cos(theta), y;
0, 0, 1 ];
IT_B = transl2(x, y) * trot2(theta); % Robotics Toolbox
Ejemplo
Suponga que un sensor de distancia instalado en un vehículo detecta una señal de tránsito en la posición \(\begin{bmatrix} 1 & 3 \end{bmatrix}^\top\). Este vehículo se encuentra en la posición \(\begin{bmatrix} 2 & 0 \end{bmatrix}^\top\) en el marco inercial (o global) con una orientación de \(\pi/3\). ¿Cuáles son las coordenadas globales de la señal de tránsito?
>> be3027_clase2_vehiculo2d.mlx
Cinemática de cuerpos rígidos en 3D
{^I}\mathbf{T}_B=\begin{bmatrix} r_{11} & r_{12} & r_{13} & x \\
r_{21} & r_{22} & r_{23} & y \\
r_{31} & r_{32} & r_{33} & z \\
0 & 0 & 0 & 1 \end{bmatrix}
{^I}\mathbf{T}_B=\begin{bmatrix} r_{11} & r_{12} & r_{13} & x \\
r_{21} & r_{22} & r_{23} & y \\
r_{31} & r_{32} & r_{33} & z \\
0 & 0 & 0 & 1 \end{bmatrix}
extensión lógica al caso 3D
{^I}\mathbf{T}_B=\begin{bmatrix} r_{11} & r_{12} & r_{13} & x \\
r_{21} & r_{22} & r_{23} & y \\
r_{31} & r_{32} & r_{33} & z \\
0 & 0 & 0 & 1 \end{bmatrix}
extensión lógica al caso 3D
ya NO tiene interpretación (única)
{^I}\mathbf{T}_B=\begin{bmatrix} r_{11} & r_{12} & r_{13} & x \\
r_{21} & r_{22} & r_{23} & y \\
r_{31} & r_{32} & r_{33} & z \\
0 & 0 & 0 & 1 \end{bmatrix}
extensión lógica al caso 3D
ya NO tiene interpretación (única)
próxima clase
Aún cuando no podamos interpretar la rotación, podemos generar la transformación mediante transformaciones (activas) elementales
\mathbf{T}_x(a)=\begin{bmatrix} 1 & 0 & 0 & a \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
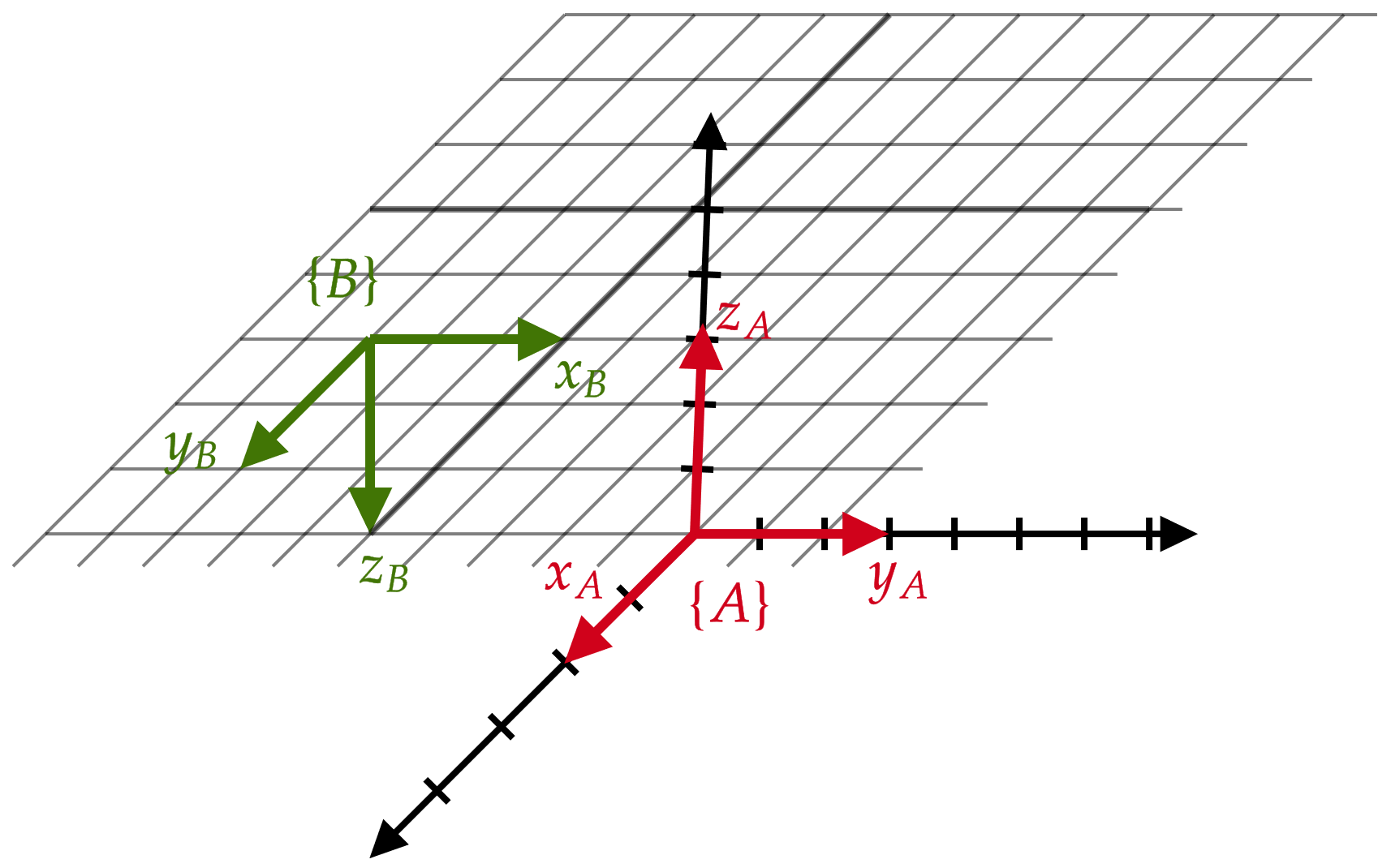
Tx = transl(a, 0, 0)\{A\}
x_A
y_A
z_A
x_B
y_B
z_B
\{B\}
{^I}\mathbf{T}_B={^I}\mathbf{T}_A\mathbf{T}_x(a)
Traslación en \(x\)
\mathbf{T}_y(a)=\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & a \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
Ty = transl(0, a, 0)\{A\}
x_A
y_A
z_A
x_B
y_B
z_B
\{B\}
{^I}\mathbf{T}_B={^I}\mathbf{T}_A\mathbf{T}_y(a)
Traslación en \(y\)
\mathbf{T}_z(a)=\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & a \\ 0 & 0 & 0 & 1 \end{bmatrix}
Tz = transl(0, 0, a)\{A\}
x_A
y_A
z_A
x_B
y_B
z_B
\{B\}
{^I}\mathbf{T}_B={^I}\mathbf{T}_A\mathbf{T}_z(a)
Traslación en \(z\)
\mathbf{T}_{R_x}(\theta)=\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos\theta & -\sin\theta & 0 \\ 0 & \sin\theta & \cos\theta & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
Trx = trotx(theta){^I}\mathbf{T}_B={^I}\mathbf{T}_A\mathbf{T}_{r_x}(\theta)
Rotación en \(x\)
\{A\}
x_A
y_A
z_A
x_B
y_B
z_B
\{B\}
\mathbf{T}_{r_y}(\theta)=\begin{bmatrix} \cos\theta & 0 & \sin\theta & 0 \\ 0 & 1 & 0 & 0 \\ -\sin\theta & 0 & \cos\theta & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
Try = troty(theta){^I}\mathbf{T}_B={^I}\mathbf{T}_A\mathbf{T}_{r_y}(\theta)
Rotación en \(y\)
\{A\}
x_A
y_A
z_A
x_B
y_B
z_B
\{B\}
\mathbf{T}_{r_z}(\theta)=\begin{bmatrix} \cos\theta & -\sin\theta & 0 & 0 \\ \sin\theta & \cos\theta & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
Trz = trotz(theta){^I}\mathbf{T}_B={^I}\mathbf{T}_A\mathbf{T}_{r_z}(\theta)
Rotación en \(z\)
\{A\}
x_A
y_A
z_A
x_B
y_B
z_B
\{B\}
¿Cuál es la pose de \(\{B\}\) con respecto de \(\{A\}\)?
>> be3027_clase2_transformaciones.m
BE3027 - Lecture 2 (2024)
By Miguel Enrique Zea Arenales



