Robótica médica y cirugía asistida por computadora
BE3027 - Robótica Médica

¿Qué tenemos hasta ahora?
\mathcal{K}:\mathcal{C}\to \mathcal{T}
{^B}\mathcal{V}_E=\mathbf{J}(\mathbf{q})\dot{\mathbf{q}}
\mathcal{K}^{-1}:\mathcal{T}\to \mathcal{C}
podemos hacer que el robot ejecute (cinemáticamente hablando) la tarea que necesitemos
\mathcal{K}:\mathcal{C}\to \mathcal{T}
{^B}\mathcal{V}_E=\mathbf{J}(\mathbf{q})\dot{\mathbf{q}}
\mathcal{K}^{-1}:\mathcal{T}\to \mathcal{C}
podemos hacer que el robot ejecute (cinemáticamente hablando) la tarea que necesitemos
dependerá de la aplicación
en nuestro caso...



Recordemos: tareas 4A
automation
autonomy
augmentation
assistance
robótica médica
Cirugía (robótica) asistida por computadora
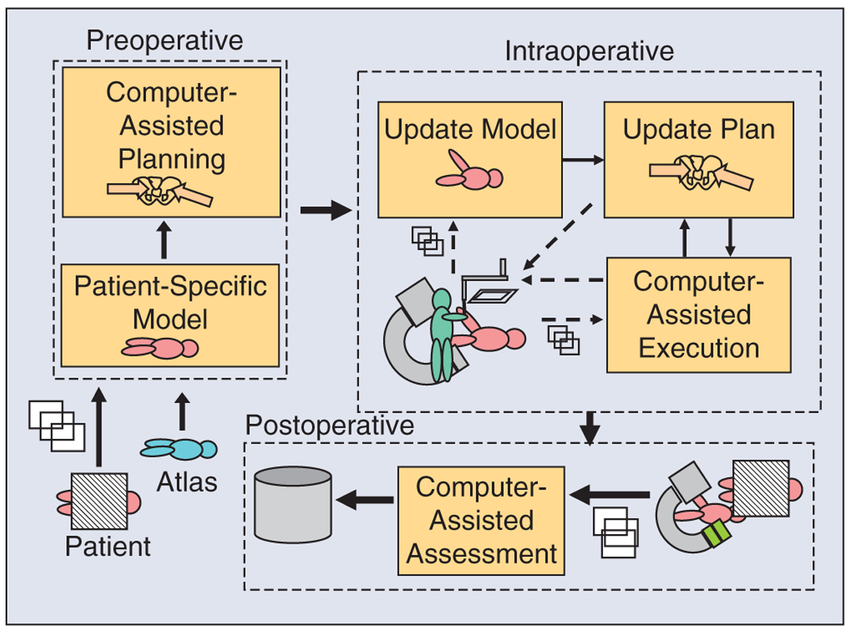
principalmente basadas en imágenes médicas
combinación de imágenes médicas con navegación y registro
Navegación


Navegación
Registro


aquí se da el principal/mayor aporte del robot
¿Qué tanto asiste el robot al cirujano? Depende del paradigma de control
Movimiento semi-autónomo
Movimiento pre-programado de forma interactiva por el cirujano, basado en imágenes médicas. Ej: inserción de agujas o instrumentos, trayectorias de herramientas de corte.

Movimiento semi-autónomo
Control teleoperado

El robot en el lado del paciente replica los movimientos registrados por la interfaz para el cirujano.
Hands-on compliant control
El cirujano recibe retroalimentación sobre la fuerza ejercida en el efector final del robot y viceversa.

Estos paradigmas no son mutuamente excluyentes ya que frecuentemente se usa una mezcla de los mismos.

Cirujano vs robot
Potencial de impacto

BE3027 - Lecture 9 (2024)
By Miguel Enrique Zea Arenales



