Automatización y control
Unidad 3: Controladores Programables para Automatización
Ing. Oscar Alonso Rosete Beas
Semana 11 Octubre Rev:2 ciclo 2020-2
oscarrosete.com

oscarrosete.com

oscarrosete.com
Sesiones Previas
Unidad III. Controladores Programables para Automatización
3.1. Sistemas de control secuencial
3.2. Diagramas de escalera
3.3. Arquitectura de un controlador programable para automatización
3.4. Diseño basado en diagramas de escalera
3.5. Diseño basado en diagramas de estado y sequential function charts
3.6. Diseño basado en bloques y ambientes visuales
3.7. Selección y evaluación de tecnologías
3.8. Integración e implementación
Agenda
Unidad III. Controladores Programables para Automatización
3.1. Sistemas de control secuencial
3.2. Diagramas de escalera
3.3. Arquitectura de un controlador programable para automatización
3.4. Diseño basado en diagramas de escalera
3.5. Diseño basado en diagramas de estado y sequential function charts
3.6. Diseño basado en bloques y ambientes visuales
3.7. Selección y evaluación de tecnologías
3.8. Integración e implementación
oscarrosete.com
Unidad 3
oscarrosete.com

Agenda
Unidad III. Controladores Programables para Automatización
3.1. Sistemas de control secuencial
3.2. Diagramas de escalera
3.3. Arquitectura de un controlador programable para automatización
3.4. Diseño basado en diagramas de escalera
3.5. Diseño basado en diagramas de estado y sequential function charts
3.6. Diseño basado en bloques y ambientes visuales
3.7. Selección y evaluación de tecnologías
3.8. Integración e implementación
oscarrosete.com
12/10
oscarrosete.com
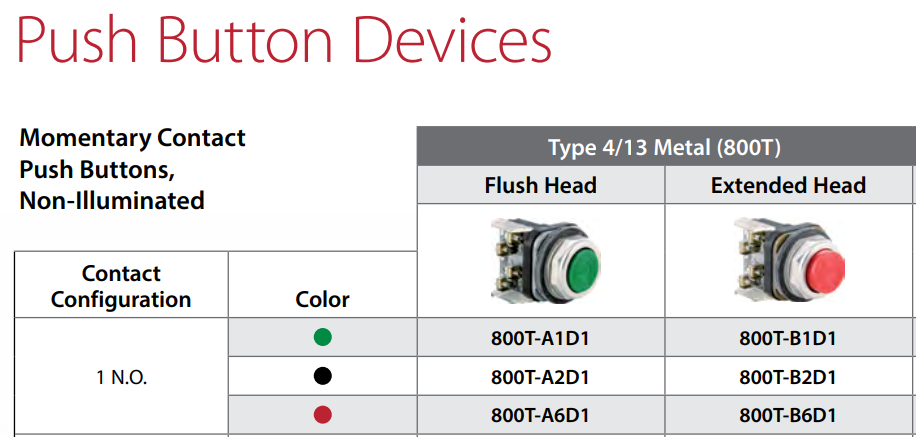
Elementos de Hardware para control secuencial
– Sensores Binarios
• Sensores de Límite
• Sensores de proximidad
• Botones
• Interruptores
– Relevadores
– Temporizadores (timers)
– Contadores
– Solenoides
– Indicadores
– HMI’s
oscarrosete.com
oscarrosete.com
3.1. Sistemas de control secuencial
12/10
oscarrosete.com
oscarrosete.com
Diagramas de escalera
Los diagramas de escalera son los que comunmente se utilizan para los circuitos de control no electrónico, se conocen como diagramas de línea o diagramas elementales.
El termino diagrama de escalera se usa por su apariencia física, se inicia en la parte superior de la escalera y generalmente se trabaja en la dirección hacia abajo. se usan dos tipos de diagramas de escalera en los sistemas de control: el diagrama de escalera de control y el diagrama de escalera de potencia.
12/10
oscarrosete.com
oscarrosete.com
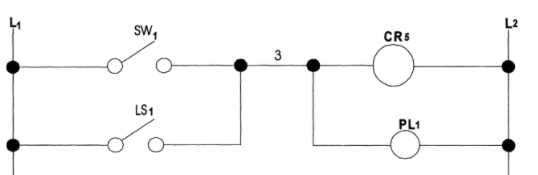
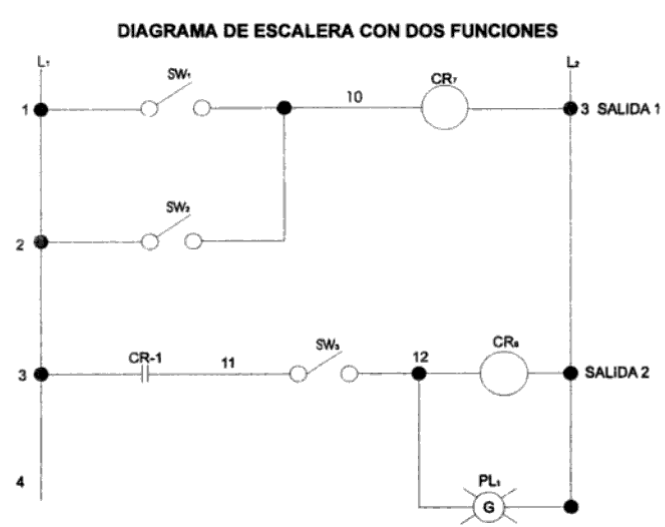
Diagramas de escalera
Se muestran lineas paralelas para el control y lineas paralelas para la salida, cada uno de los switches (desconectadores), accionan la salida y encienden una lámpara piloto.
12/10
oscarrosete.com
oscarrosete.com
Diagramas de escalera control
12/10
oscarrosete.com
oscarrosete.com
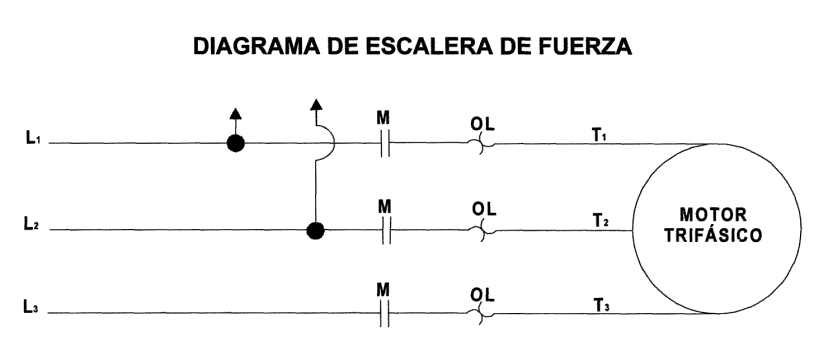
Diagramas de escalera potencia
12/10
oscarrosete.com
oscarrosete.com
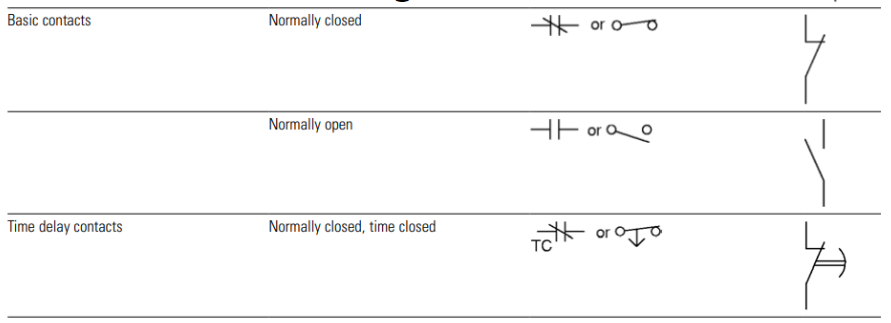
Referencia simbología
12/10
oscarrosete.com
oscarrosete.com
Ejemplo aplicación
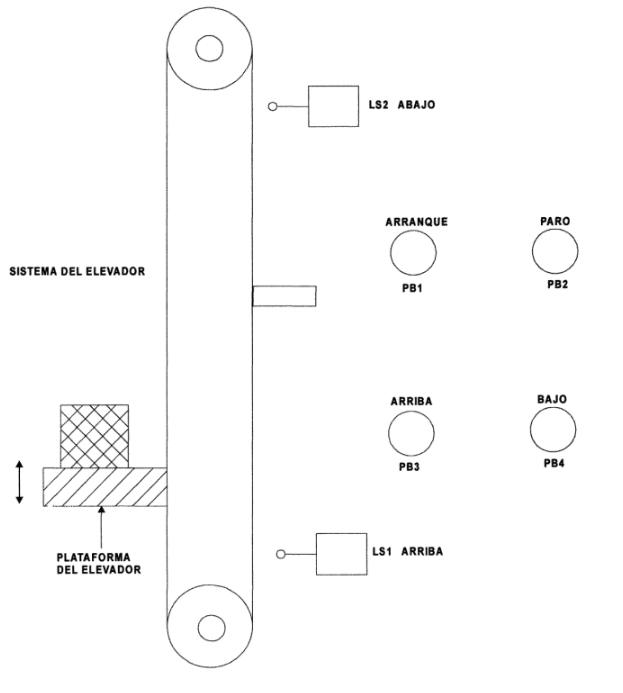
Un elevador emplea una plataforma para mover objetos hacia arriba y hacia abajo.
El objetivo global es que cuando el botón arriba sea oprimido, la plataforma se transporte a la posición arriba, y cuando se oprima el botón de abajo , la plataforma se transporte hacia abajo.
12/10
oscarrosete.com
oscarrosete.com
Ejercicio Tarea
- Investigar el circuito de arranque, paro e inversión de giro de un motor trifásico y documentarlo en archivo en formato pdf.
- Replicar con un diagrama de escalera en software EKTS.
- Subir archivo, junto con video explicativo a actividad en Blackboard
12/10
Agenda
Unidad III. Controladores Programables para Automatización
3.1. Sistemas de control secuencial
3.2. Diagramas de escalera
3.3. Arquitectura de un controlador programable para automatización
3.4. Diseño basado en diagramas de escalera
3.5. Diseño basado en diagramas de estado y sequential function charts
3.6. Diseño basado en bloques y ambientes visuales
3.7. Selección y evaluación de tecnologías
3.8. Integración e implementación
oscarrosete.com
12/10
oscarrosete.com
Sistema control
oscarrosete.com
12/10
oscarrosete.com
oscarrosete.com
12/10
oscarrosete.com
Un automatismo es un sistema que realiza una labor de manera automática de acuerdo a los parámetros con los cuales ha sido diseñado.
Los objetivos de un automatismo son mejorar la eficiencia del proceso incrementando la velocidad de ejecución de las tareas, la calidad y la precisión, disminuyendo además los riesgos que se podrían tener si las mismas fuesen manuales.
Automatismos Cableados vs Programables
oscarrosete.com
12/10
oscarrosete.com
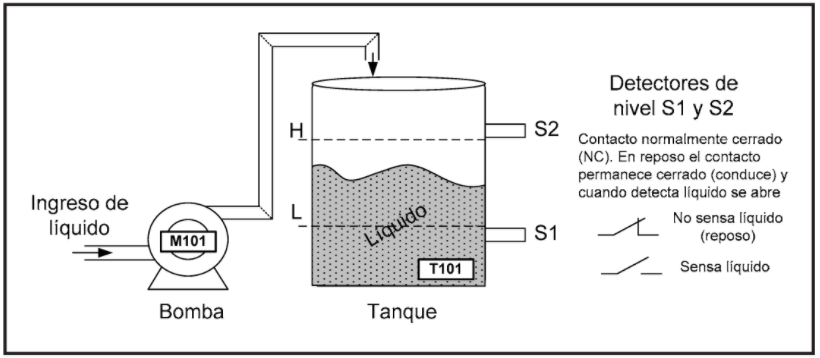
un sistema compuesto de un tanque que suministra agua al resto de un proceso productivo. La finalidad del automatismo a implementar es mantener el nivel del líquido dentro del tanque entre los niveles L y H.
Sistema de control de nivel de agua
oscarrosete.com
12/10
oscarrosete.com
Para ello se utilizarán dos detectores de nivel y una bomba que impulsa líquido al interior del tanque. Cada detector de nivel dispone de un contacto eléctrico que está normalmente cerrado y se abre en caso de sensar líquido.
Sistema de control de nivel de agua
oscarrosete.com
12/10
oscarrosete.com
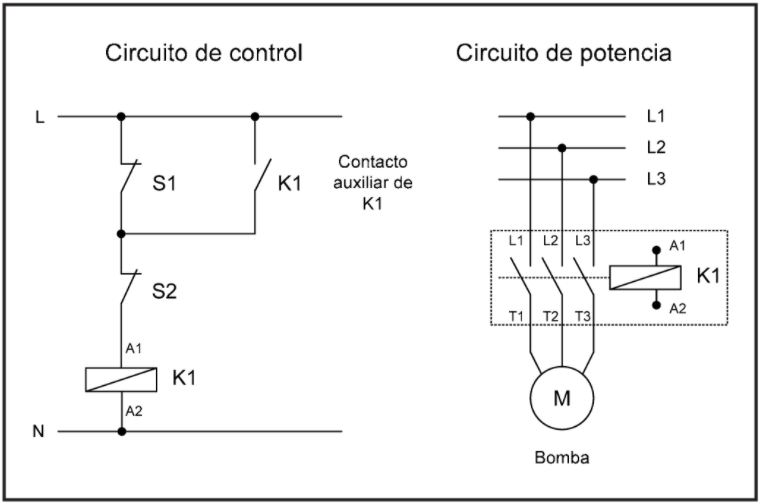
Existen diferentes alternativas para obtener un sistema automático que cumpla con lo requerido. Una posibilidad es mediante el uso de relés.
Sistema de control con relevadores
oscarrosete.com
12/10
oscarrosete.com
Si el nivel de líquido se encuentra entre L y H, el interruptor S1 estará abierto y S2 cerrado. Cuando el nivel esté por debajo de L, se cerrará S1 y se activará el contactor K1, accionando la bomba mediante sus contactos de potencia. Esto provocará que ingrese líquido al tanque aumentando el nivel.
Sistema de control con relevadores
oscarrosete.com
12/10
oscarrosete.com
Una vez que el nivel supera L, el interruptor S1 se abrirá pero la bomba se mantendrá en funcionamiento debido a que el contacto auxiliar de retención de K1 mantendrá la bobina energizada. Cuando el nivel esté por encima de H se abrirá el contacto S2 desconectando el contactor K1.
Sistema de control con relevadores
oscarrosete.com
12/10
oscarrosete.com
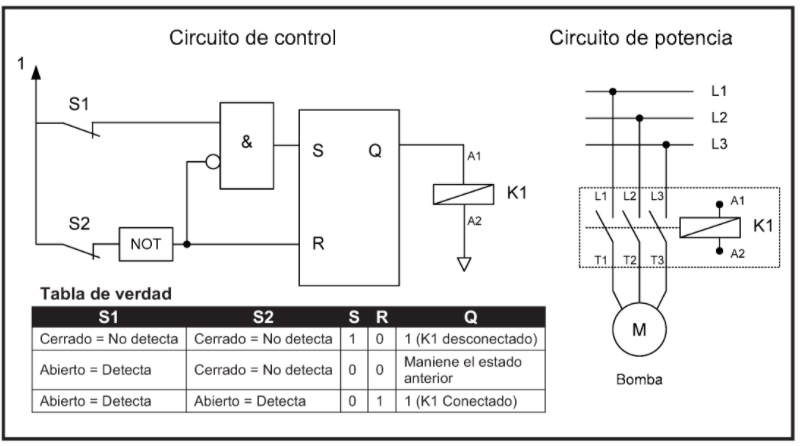
También, es factible implementar este sistema de control utilizando técnicas digitales. En la figura se muestra un circuito basado en un flip-flop SR (Set-Reset).
Alternativa 2 (flip flops)
oscarrosete.com
12/10
oscarrosete.com
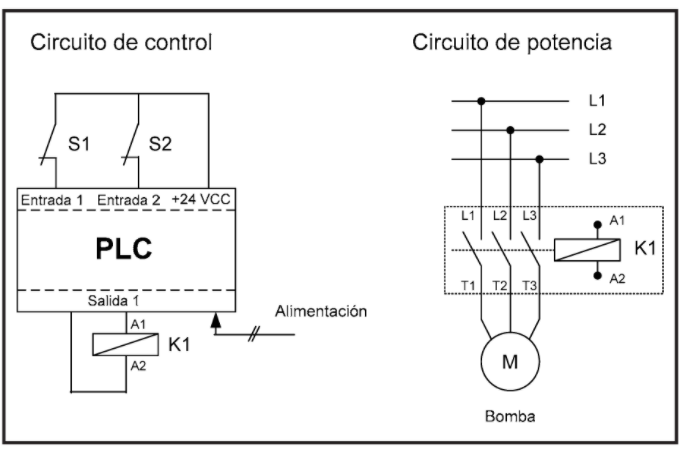
Podemos definir a un PLC (Programmable Logic Controller - Controlador Lógico Programable) como un equipo electrónico, programable por el usuario en lenguaje no informático, y que está destinado a gobernar, dentro de un entorno industrial, máquinas o procesos lógicos y/o secuenciales.
Alternativa 3 (PLC)
oscarrosete.com
12/10
oscarrosete.com
Un PLC consta de un hardware estándar, con capacidad de conexión directa a las señales de campo (niveles de tensión y corriente compatibles con los sensores yactuadores industriales) y programable por el usuario para que desempeñe una determinada función.
Una vez programado, el PLC trabaja de forma cíclica. Durante su funcionamiento, primero se leen los estados de las entradas memorizándose en un área de memoria denominada imagen de proceso de las entradas (PAE)
Controlador lógico programable

oscarrosete.com
12/10
oscarrosete.com
Con esta información se ejecuta luego el programa de control y, de acuerdo a su lógica, se va modificando otra área de memoria conocida como imagen de proceso de las salidas (PAA).
En la última etapa del ciclo, los estados memorizados en la PAA se transfieren a las salidas físicas. Seguidamente comienza de nuevo el ciclo.
Controlador lógico programable
oscarrosete.com
12/10
oscarrosete.com
Para utilizar un PLC como controlador del nivel del tanque será necesario entonces conectar cada detector a una entrada y el contactor K1 que comanda la bomba a una salida. Luego se necesita realizar el programa en una PC para después ser descargado al PLC mediante un cable de comunicación.
Controlador lógico programable
oscarrosete.com
12/10
oscarrosete.com
Este programa consiste en una secuencia en instrucciones que el PLC ejecutará en forma repetitiva dándole una funcionalidad específica. Una vez programado, el PLC almacena este programa y no se requiere la conexión de la PC para su funcionamiento.
La programación de los PLC puede ser realizada en diferentes lenguajes, tales como ladder o KOP, bloques de función o FUP, listado de instrucciones o AWL, texto estructurado, etc.
Controlador lógico programable
oscarrosete.com
12/10
oscarrosete.com
Lenguaje Ladder
oscarrosete.com
12/10
oscarrosete.com
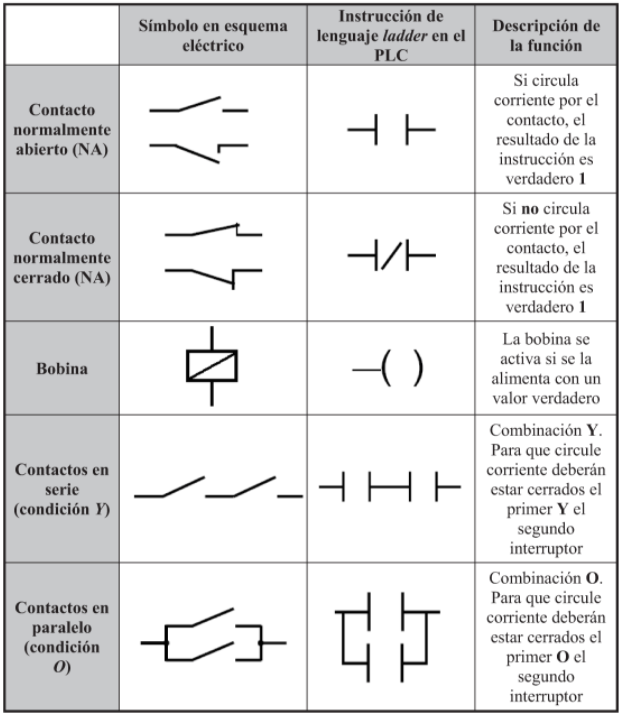
Al programar en ladder o KOP, se emplea un formato de programación gráfico, compuesto por varios segmentos.
En dichos segmentos se pueden encontrar contactos en estado normal abierto y/o cerrado, bobinas y cuadros de funciones especiales. Este lenguaje está basado en un esquema de contactos eléctricos.
Lenguaje Ladder
oscarrosete.com
12/10
oscarrosete.com
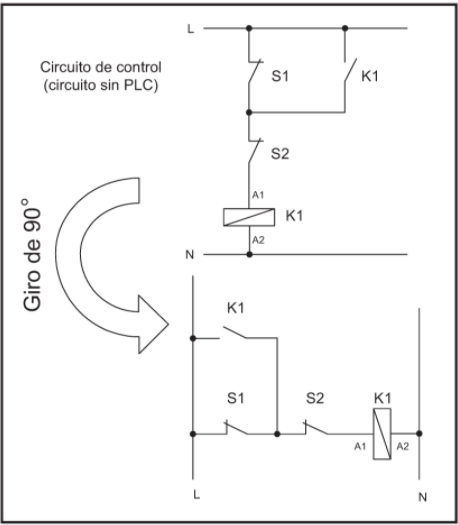
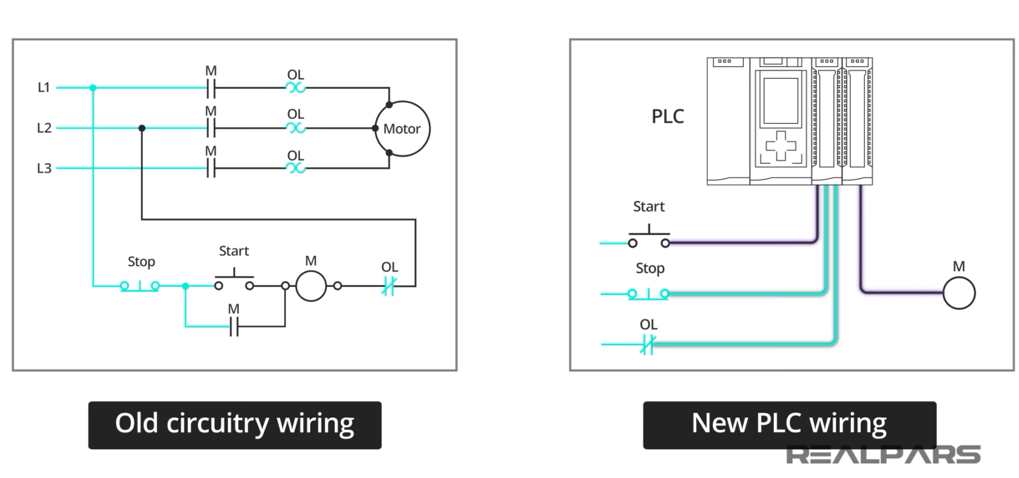
Para pasar de un esquema eléctrico a un programa en lenguaje ladder o KOP, en primer lugar se debe girar el esquema eléctrico 90° hacia la izquierda.
De esta manera, la línea de fase L se ubica a la izquierda y el neutro N a la derecha, quedando en el centro los contactos del circuito.
Lenguaje Ladder
oscarrosete.com
12/10
oscarrosete.com
De acuerdo a lo mencionado, la parte del esquema que representa la lógica control (lógica de maniobra) será sustituida por el PLC, pero no es posible reemplazar a los sensores (por ejemplo, interruptores, selectores, sensores, etc.) de entrada, ni a los actuadores (por ejemplo, contactores de motor, válvulas, etc.) de salida.
Lenguaje Ladder
oscarrosete.com
12/10
oscarrosete.com
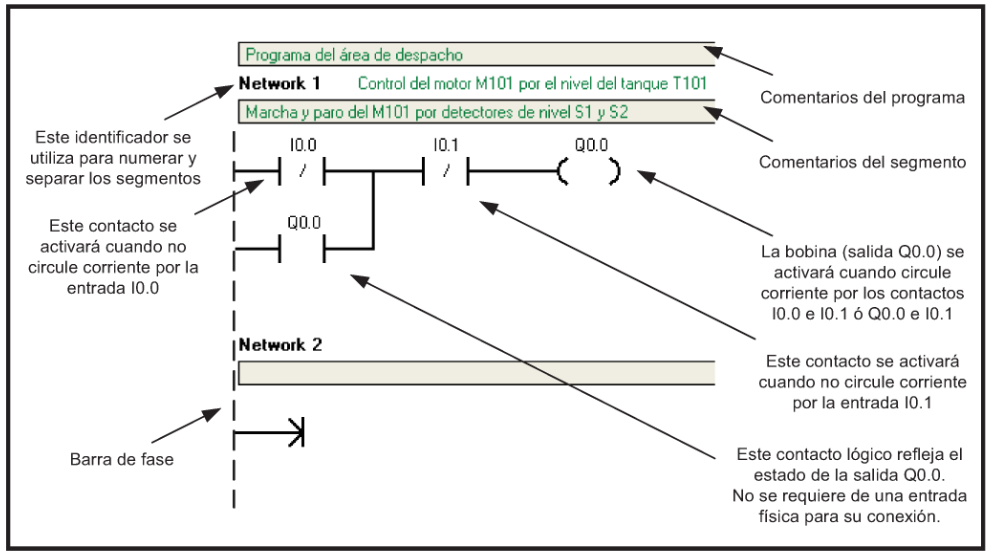
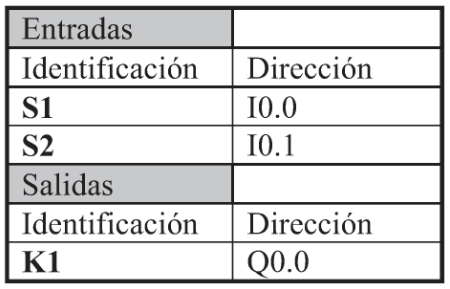
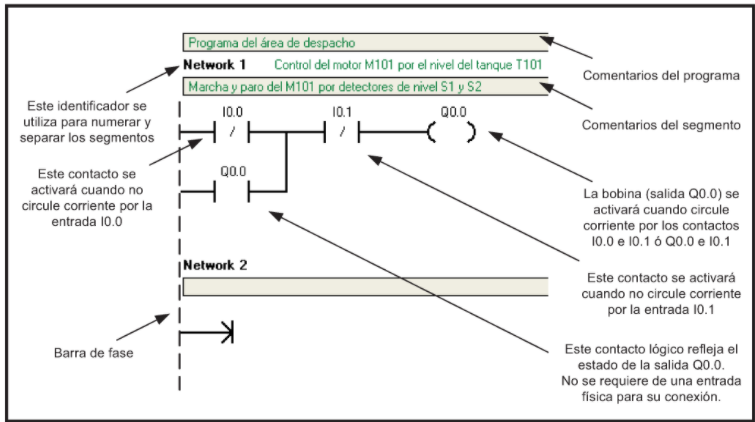
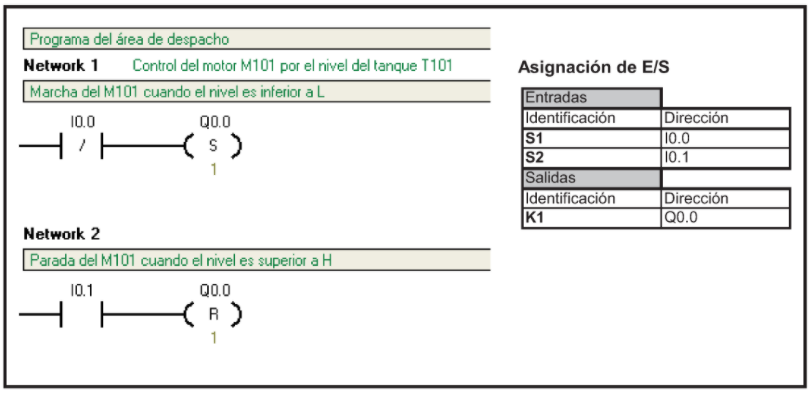
En la figura se puede observar el programa correspondiente al control de nivel en lenguaje ladder o KOP. En la entrada I0.0 del PLC se conectó el sensor S1, en la entrada I0.1 se conectó el sensor S2 y en la salida Q0.0 se conectó la bobina del contactor K1
Lenguaje Ladder
oscarrosete.com
12/10
oscarrosete.com
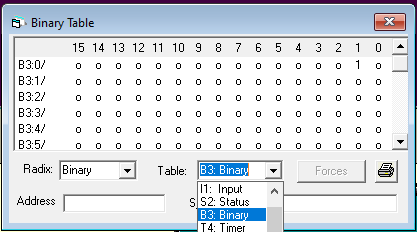
Listado de asignación de entradas y salidas para el programa
oscarrosete.com
12/10
oscarrosete.com
Si el nivel en el tanque es inferior a L, no circula corriente por S1 ni S2 y, por lo tanto, se activa la salida Q0.0. Durante el ciclo de ejecución siguiente (tras pocos milisegundos) aparecerá cerrado el contacto Q0.0 conectado en paralelo a I0.0. Esto hace que actúe la auto-retención. El contacto normalmente cerrado I0.1 permite, que si se actúa sobre el detector S2 (al detectar nivel superior a H), se anule la auto-retención. El contacto Q0.0 es un contacto lógico interno (no físico) que se cierra cuando se activa la salida Q0.0.
Lenguaje Ladder
oscarrosete.com
12/10
oscarrosete.com
Variante de solución con PLC
oscarrosete.com
12/10
oscarrosete.com
Estas funciones actúan como un flip-flop SR (Set-Reset). Por lo tanto, un impulso en I0.0 permite, gracias a la operación Poner a 1 (S), que se conecte permanentemente Q0.0. En cambio, un impulso en I0.1 hace, a través de la operación Poner a 0 (R), que Q0.0 se vuelva a desconectar.
Variante de solución con PLC
oscarrosete.com
oscarrosete.com
Controlador lógico programable
12/10
oscarrosete.com
oscarrosete.com
Controlador lógico programable
12/10
12/10
oscarrosete.com
oscarrosete.com
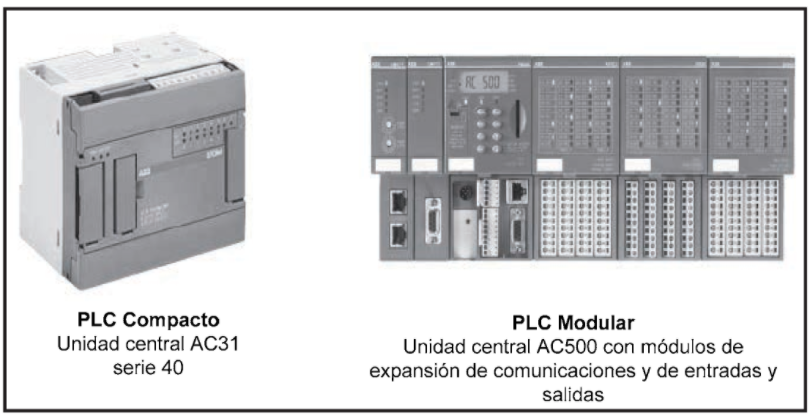
PLC Modulares
12/10
12/10
La mayoría de los PLC poseen la característica de ser modulares. Esto significa que el hardware está fragmentado en partes que se pueden interconectar y permiten configurar un sistema a la medida de las necesidades. Los PLC que adoptan la definición de modulares, suelen tener la CPU, la fuente de la alimentación y los módulos de entrada y salida por separado.
Los equipos compactos suelen incluir una CPU, una fuente interna y un mínimo de entradas y salidas, y luego tienen previstas una serie de unidades de expansión que les permiten ampliar considerablemente el número entradas y salidas.
oscarrosete.com
oscarrosete.com
PLC Modulares
12/10
12/10
oscarrosete.com
oscarrosete.com
Controlador lógico programable
oscarrosete.com
oscarrosete.com
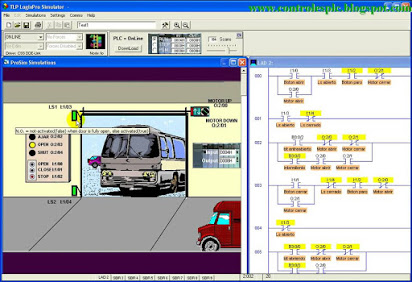
LogixPro
12/10
oscarrosete.com
oscarrosete.com
Controlador lógico programable
oscarrosete.com
oscarrosete.com
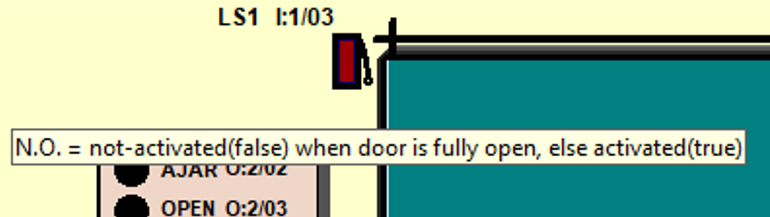
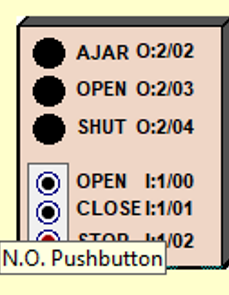
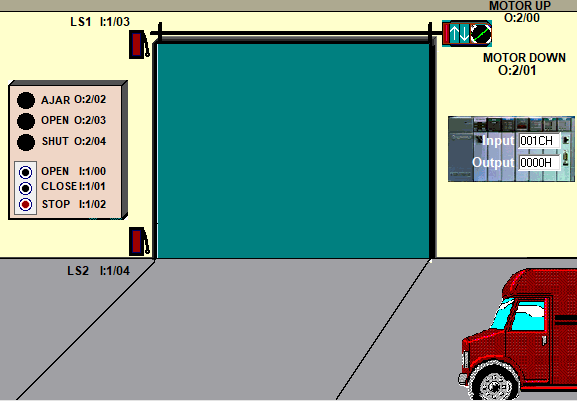
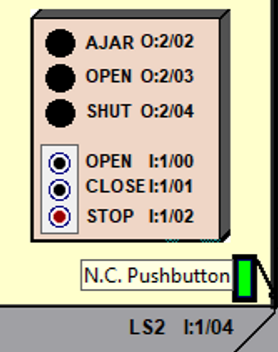
Consideraciones "Door Simulation"
12/10
oscarrosete.com
oscarrosete.com
Controlador lógico programable
oscarrosete.com
oscarrosete.com
Consideraciones "Door Simulation"
12/10

oscarrosete.com
oscarrosete.com
Controlador lógico programable
oscarrosete.com
oscarrosete.com
Consideraciones "Door Simulation"
12/10
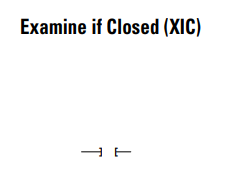
Use the XIC instruction in your ladder program to determine if a bit is On. If the bit addressed is on (1), then the instruction is evaluated as true.
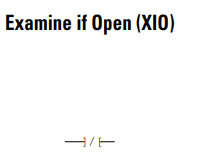
Use the XIO instruction in your ladder program to determine if a bit is Off.
If the bit addressed is off (0), then the instruction is evaluated as true.
oscarrosete.com
oscarrosete.com
Controlador lógico programable
oscarrosete.com
oscarrosete.com
Consideraciones "Door Simulation"
12/10
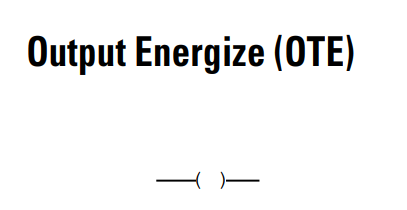
Use the OTE instruction in your ladder program to turn on a bit when rung conditions are evaluated as true.
oscarrosete.com
oscarrosete.com
Controlador lógico programable
oscarrosete.com
oscarrosete.com
- Ver video y replicar con un diagrama de escalera en software LogixPro.
- Subir video explicativo a actividad en Blackboard
12/10
oscarrosete.com
oscarrosete.com
Unidad III. Controladores Programables para Automatización
3.1. Sistemas de control secuencial
3.2. Diagramas de escalera
3.3. Arquitectura de un controlador programable para automatización
3.4. Diseño basado en diagramas de escalera
3.5. Diseño basado en diagramas de estado y sequential function charts
3.6. Diseño basado en bloques y ambientes visuales
3.7. Selección y evaluación de tecnologías
3.8. Integración e implementación

12/10
Sesiones Previas
Unidad 1: Automatización y Control Industrial
1.1. Definiciones y conceptos relacionados a los sistemas de control
1.2. Aplicaciones industriales de los sistemas de control
1.3. Sistemas de control de lazo abierto y Sistemas de Control de Lazo Cerrado
1.4. Modelado de sistemas dinámicos
1.5.Características de la respuesta en el tiempo
1.6. Estabilidad y error en estado estable
1.7. Controladores: Tipos, características y aplicaciones
1.8 Fundamentos de Labview y Matlab
oscarrosete.com
Sesiones Previas
Unidad 1: Automatización y Control Industrial
1.1. Definiciones y conceptos relacionados a los sistemas de control
1.2. Aplicaciones industriales de los sistemas de control
1.3. Sistemas de control de lazo abierto y Sistemas de Control de Lazo Cerrado
1.4. Modelado de sistemas dinámicos
1.5.Características de la respuesta en el tiempo
1.6. Estabilidad y error en estado estable
1.7. Controladores: Tipos, características y aplicaciones
1.8 Fundamentos de Labview y Matlab
oscarrosete.com
oscarrosete.com
Agenda
Automatización y Control semana 10 11 Octubre
By Oscar Rosete



