Sistemas Operativos en Tiempo Real
Introducción y generalidades de los Sistemas Operativos en Tiempo Real
Caracteristicas Generales
Generalidades de los S.O en tiempo real
Enfocado a Procesos Criticos
Cajeros electrónicos, lavadores, etc..
Procesador
El papel del procesador en un S.O en tiempo real
Single core / Multi core
Se pueden usar procesadores de un core o varios
Diseño
Diseño de un S.O en Tiempo Real
Event Driven
Orientado a eventos
Time sharing
Orientado a tiempo
Programación
Estilo y paradigma de programación
Occam
Es un lenguaje de programación imperativo y estructurado, es un lenguaje de procesamiento en paralelo, aporta facilidad para usar hilos, y apoyo sin fisura para los entornos multi-procesador
ADA
Es un lenguaje de programación orientado a objetos y tipificado de forma estática. Fue diseñado con la seguridad en mente y orientado a la reducción de errores comunes y difíciles de descubrir. Para ello se basa en chequeos en tiempo de ejecución(desactivables para beneficio del rendimiento). La sincronización de tareas se realiza mediante la primitiva de rendezvois ( es una primitiva de sincronización asimétrica).
Comunicación entre Tareas
Transferencia de información entre tareas
- Cuando dos o más tareas se sincronizan se produce una inversión de prioridades
- Se puede limitar la duración de los bloqueos producidos por la inversión de prioridades utilizando un protocolo adecuado (PIP, CPP, ICPP)
- sólo sirve en sistemas
- planificados con prioridades fijas
- con un conjunto estático de tareas periódicas y esporádicas
- con comunicación mediante datos comunes protegidos (exclusión mutua)
- no sirve cuando hay sincronización condicional, paso de mensajes u otras formas de sincronización
- sólo sirve en sistemas
Interrupciones
Manejo de interrupciones
Es una de las formas de pasar información del mundo exterior, generalmente son impredecibles, para que el programa cumpla en ser en tiempo real tiene que atender la interrupción y procesar la información antes de que se presente la interrupción, esto se logra enviando un mensaje a una tarea o solucionando un semáforo que esta siendo esperado por una tarea.
Si las señales que están siendo procesadas tienen una frecuencia mayor a la saturación, el sistema será incapaz de procesarlas
Memoria
Almacenamiento de datos

Manejo prioritario:


Bloque de memoria

Clock Tick

Comunicación
Intercambio de información
Bloque de memoria
Clock Tick
Ejemplos
Implementación y uso en la industria

1. FreeRtos
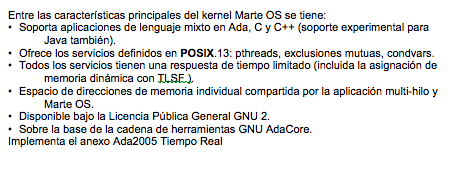
2. MaRTE OS
http://www.freertos.org
http://marte.unican.es
Fabricantes
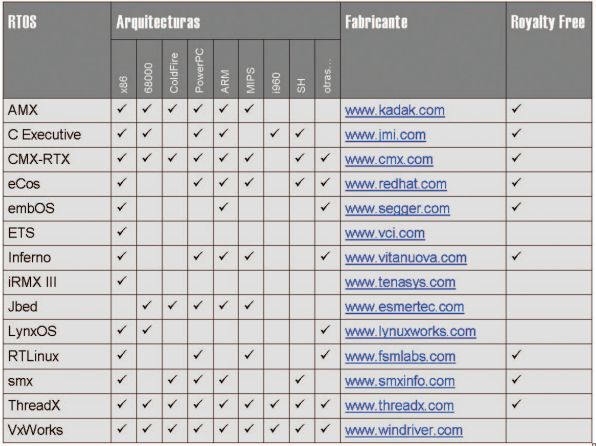
Quien produce los S.O en tiempo real
Tabla de fabricantes
Gracias!
Preguntas!
Real time Operative Systems
By pablovallejo
Real time Operative Systems
Introduction to real time operative Systems



