


R Rajkumar
Professor | Author - INDIA 2030 book | Speaker | Innovator | 100 Inspiring Author of India | Passionate Indian | One among powerful youth in India
Industrial Automation
Robotics and Artificial Intelligence
Prof. R. Rajkumar
1 Sensor and actuator characteristics and modelling
2 Industrial On-Off control with the use of classical mechanical relays and PLCs.
3. Plant modelling - linear and nonlinear plant characteristics, plant linearisation, PID controller design.
4 Fuzzy set theory, 5 Fuzzy controllers and AI methods applied to industrial control problems
6 Nonlinear industrial control problems - interconnected tanks, inverted pendulum.
7 Robot position & velocity kinematic analysis theory and its application to
8 classical manipulators and wrist mechanisms
9 Denavit-Hartenberg theory, role of homogeneous transformations
10 Revision of entire syllabus
Automation is one of the major aspects in process applications of industrial AI.
With the help of AI, the scope and pace of automation have been fundamentally changed.
AI technologies boost the performance and expand the capability of conventional AI applications.
An example is the collaborative robots. Collaborative robotic arms are able to learn the motion and path demonstrated by human operators and perform the same task.
The History of Programmable Logic Controllers
In the late 1960’s an American company named Bedford Associates released a computing device they called the MODICON. As an acronym, it meant Modular Digital Controller, and later became the name of a company division devoted to the design, manufacture, and sale of these special-purpose control computers.
Other engineering firms developed their own versions of this device, and it eventually came to be known in non-proprietary terms as a PLC, or Programmable Logic Controller.
The purpose of a PLC was to directly replace electromechanical relays as logic elements, substituting instead a solid-state digital computer with a stored program, able to emulate the interconnection of many relays to perform certain logical tasks.
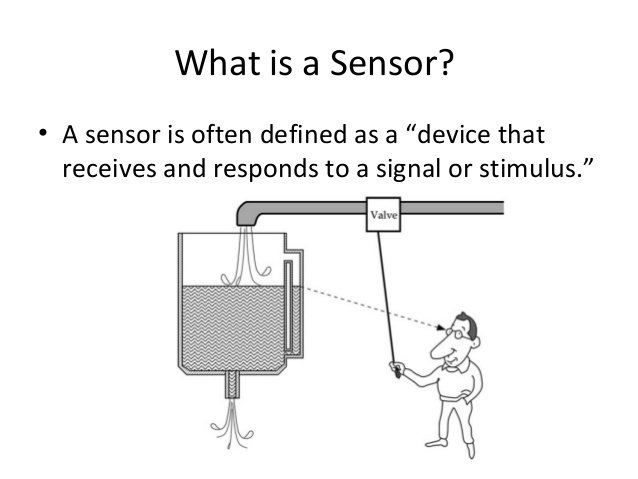
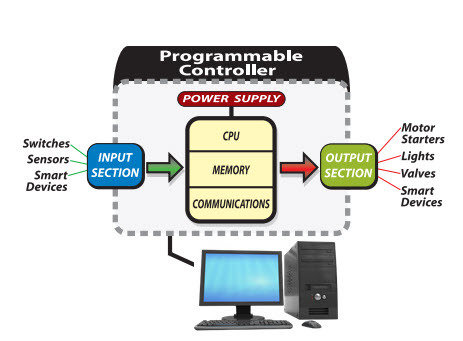
Programmable Logic Controllers
A PLC has many “input” terminals, through which it interprets “high” and “low” logical states from sensors and switches. It also has many output terminals, through which it outputs “high” and “low” signals to power lights, solenoids, contactors, small motors, and other devices lending themselves to on/off control.
Programmable Logic Controllers
In an effort to make PLCs easy to program, their programming language was designed to resemble ladder logic diagrams. Thus, an industrial electrician or electrical engineer accustomed to reading ladder logic schematics would feel comfortable programming a PLC to perform the same control functions.
Programmable Logic Controllers
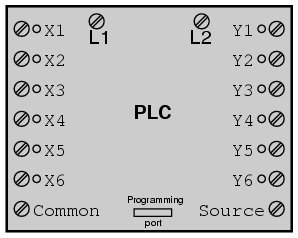
PLCs are industrial computers, and as such their input and output signals are typically 120 volts AC, just like the electromechanical control relays they were designed to replace. Although some PLCs have the ability to input and output low-level DC voltage signals of the magnitude used in logic gate circuits, this is the exception and not the rule.
The following illustration shows a simple PLC, as it might appear from a front view. Two screw terminals provide connection to 120 volts AC for powering the PLC’s internal circuitry, labeled L1 and L2. Six screw terminals on the left-hand side provide connection to input devices, each terminal representing a different input “channel” with its own “X” label. The lower-left screw terminal is a “Common” connection, which is generally connected to L2 (neutral) of the 120 VAC power source.
To describe the various elements of an Industrial Automation Systems and how they are organized hierarchically in levels.
To explain how these levels relate to each other in terms of their functions.
To describe the nature of technologies involved in realizing these functional levels
To describe the nature of information processing in these levels and the information flow among them
By R Rajkumar




