Занятие №2:
Введение в обучение с подкреплением

Основные понятия
Обучение с подкреплением



Определение
Обучение с подкреплением - это подход к решению различных задач путем создания агентов, которые учатся у окружающей среды, взаимодействуя с ней методом проб и ошибок и получая вознаграждения (положительные или отрицательные) в виде уникальной обратной связи.
Пример
Еще примеры
-
Мастер-шахматист;
-
Адаптивный контроллер;
-
Детеныш газели;
-
Подвижный робот;
-
Торговая система или трейдер;
-
Дофаминовая система;
-
Компьютерные игры;
-
Дрессировка собак;
-
Автомобиль с автопилотом.
Принцип работы

Окружение
Действие
At
Агент
Награда
Rt
Состояние
St
Принцип работы
Агент;
Стратегия;
Вознаграждение;
Функция ценности;
Наблюдение и состояние среды;
Окружающая среда.
Вознаграждение
-
Финансовая торговля: сумма прибыли - это награда для трейдера, покупающего и продающего акции;
-
Шахматы: награда за победу, поражение или ничью в конце игры;
-
Дофаминовая система в головном мозге: есть часть мозга (лимбическая система), которая производит дофамин каждый раз, когда ему нужно послать положительный сигнал остальной части мозга;
-
Дрессировка собак: если вы когда-либо пытались дрессировать собаку, вы знаете, что вам нужно давать ей что-нибудь вкусное (но не слишком много) каждый раз, когда она делает то, о чем вы просили.
Вознаграждение
R_{общ} = r_{t+1} + r_{t+2} + r_{t+3} + r_{t+4} + ...
R_{общ} = \sum^{\infty}_{k=0} r_{t+k+1}
Состояние среды
-
Состояние – полное описание состояния мира (нет скрытой информации). В полностью наблюдаемой среде. При игре в шахматы мы находимся в полностью наблюдаемой среде, поскольку у нас есть доступ ко всей информации на шахматной доске;
-
Наблюдение - частичное описание состояния. В Super Mario или другой похожей игре мы находимся в частично наблюдаемой среде, мы получаем наблюдение, поскольку видим только часть уровня.
Основная мысль
Требуется уловить наиболее важные аспекты реальной проблемы, стоящей перед обучающимся агентом, который взаимодействует во времени с окружающей средой для достижения некоторой цели. Обучающийся агент должен уметь в какой-то степени воспринимать состояние среды и предпринимать действия, изменяющие это состояние. У агента также должна быть цель или несколько целей, как-то связанных с состоянием окружающей среды.
Подводные камни
-
Проблема исследования-использования;
-
Слишком много исследований;
-
Задержка вознаграждения.
Цепи Маркова
| Солнечно | Пасмурно | |
|---|---|---|
| Солнечно | 0.8 | 0.2 |
| Пасмурно | 0.1 | 0.9 |
Солнечно
Пасмурно
0.1
0.2
0.9
0.8
Цепи Маркова
Разговор
Компьютер
Кофе
Дом
0.1
0.3
0.5
0.2
0.6
0.4
0.2
0.2
0.1
0.7
0.2
0.5
Марковские процессы вознаграждения
R_{общ} = R_{t+1} + \gamma R_{t+2} + ... = \sum^{\infty}_{k=0} \gamma^{k} R_{t+k+1}
V(s) = E[G|S_{t} = s]
Марковские процессы вознаграждения
Разговор
Компьютер
Кофе
Дом
0.1
0.3
0.5
0.2
0.6
0.4
0.2
0.2
0.1
0.7
0.2
0.5
5
1
2
1
1
3
1
2
1
-1
2
-3
Добавление действий
Целевое состояние
Исходное
состояние
Вероятность перехода из i в j
Вероятность перехода из i в j при действии k
Действие
Целевое состояние
Исходное
состояние
МППР
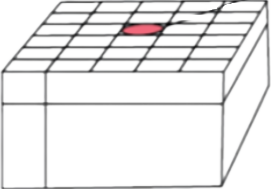
Добавление действий
0
1
2
0
1
2
Робот в ячейке (1,1)
0.1
0.1
0.9
0.9
0.9
0.1
Влево
Вправо
Вперед
(1,0)
(1,1)
(1,2)
(0,1)
Часть схемы переходов роботов
Политика
Политика - некоторый набор правил, контролирующих поведение агента.
\pi(a|s) = P[A_{t} = a|S_{t} = s]
Спасибо за понимание!
(ШИЛИ) Лекция №2. Введение в обучение с подкреплением
By Protectornaldo



