







































Roberto Calandra PRO
Full Professor at TU Dresden. Head of the LASR Lab. Working in AI, Robotics and Touch Sensing.
Roberto Calandra
Facebook AI Research
Re-Work Deep Reinforcement Learning Summit - 21 June 2019
From YouTube: https://www.youtube.com/watch?v=g0TaYhjpOfo
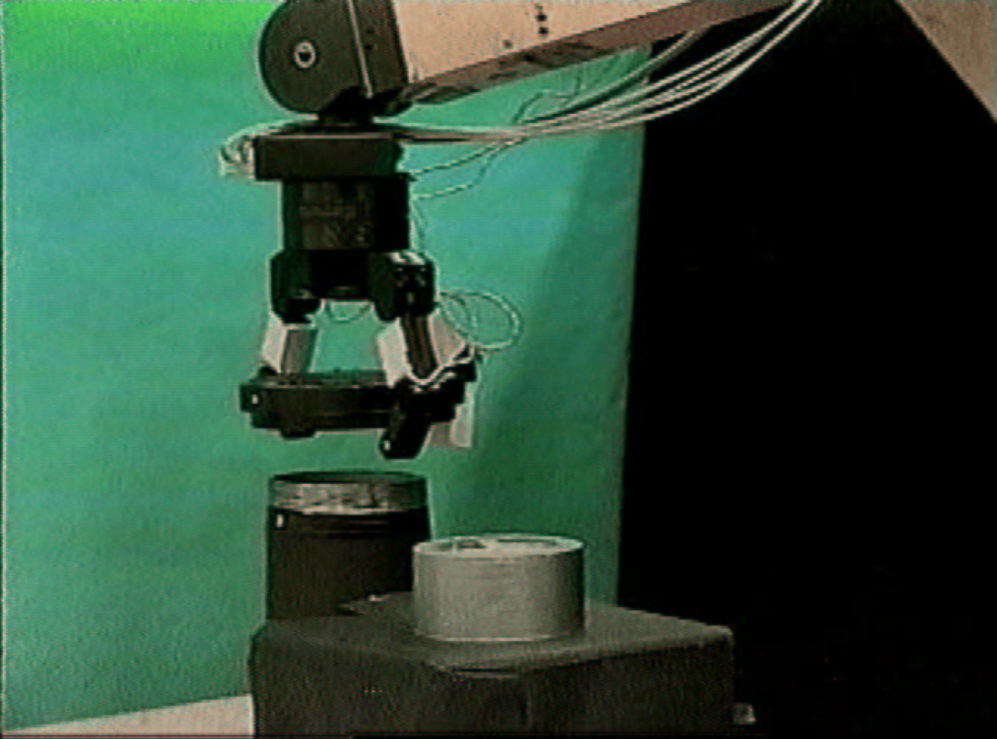
From the lab of Dr. Ronald Johansson, Dept. of Physiology, University of Umea, Sweden
[Allen et al. 1999]
[Chebotar et al. 2016]
[Bekiroglu et al. 2011]
[Sommer and Billard 2016]
[Schill et al. 2012]
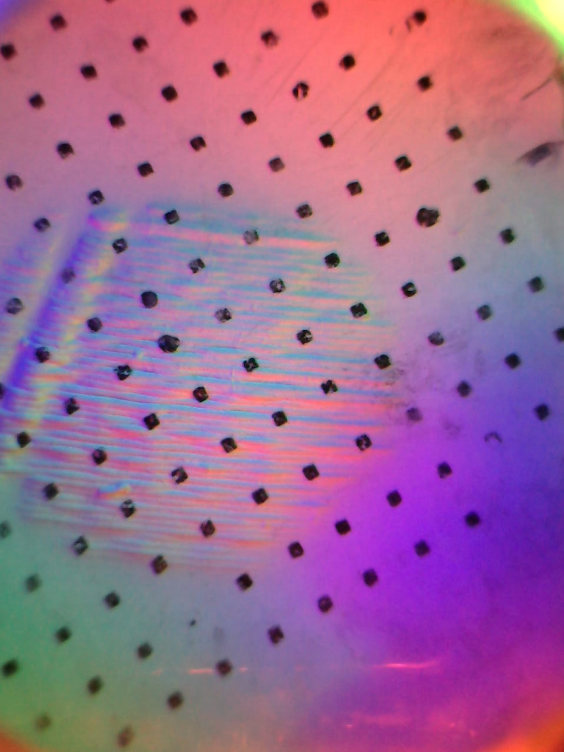
[Yuan, W.; Dong, S. & Adelson, E. H. GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force Sensors, 2017]
Collected 6450 grasps from over 60 training objects over ~2 weeks.
83.8% grasp success on 22 unseen objects
(using only vision yields 56.6% success rate)
Tian, S.; Ebert, F.; Jayaraman, D.; Mudigonda, M.; Finn, C.; Calandra, R. & Levine, S.
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
IEEE International Conference on Robotics and Automation (ICRA), 2019
Calandra, R.; Owens, A.; Jayaraman, D.; Yuan, W.; Lin, J.; Malik, J.; Adelson, E. H. & Levine, S.
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
IEEE Robotics and Automation Letters (RA-L), 2018, 3, 3300-3307
Andrew
Owens
Dinesh
Jayaraman
Wenzhen
Yuan
Justin
Lin
Jitendra
Malik
Sergey
Levine
Edward H.
Adelson
Vision:
Towards active feedback control from multi-modal sensing
Thank you for your attention
Tian, S.; Ebert, F.; Jayaraman, D.; Mudigonda, M.; Finn, C.; Calandra, R. & Levine, S.
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
IEEE International Conference on Robotics and Automation (ICRA), 2019
By Roberto Calandra
Humans make extensive use of touch. However, integrating the sense of touch in robot control has traditionally proved to be a difficult task. In this talk, I will discuss how machine learning can help to provide robots with the sense of touch, and the benefits of doing so.



