









Sarah Dean PRO
asst prof in CS at Cornell
Nonlinear control affine dynamics with state \(\mathbf x\in\mathbb R^n\) and input \(\mathbf u\in\mathbb R^m\)
\(\dot{\mathbf x} = \mathbf f(\mathbf x)+\mathbf g(\mathbf x)\mathbf u\)
\({\mathbf x}_{t+1} = \mathbf f(\mathbf x_t)+\mathbf g(\mathbf x_t)\mathbf u_t\)
functions \(\mathbf f\) and \(\mathbf g\) unknown (or partially unknown)
1. Towards Robust Data-Driven Control Synthesis for Nonlinear Systems with Actuation Uncertainty with Andrew Taylor, Victor Dorobantu, Benjamin Recht, Yisong Yue, Aaron Ames
2. Random Features Approximation for Control-Affine Systems with Kimia Kazemian, Yahya Sattar
3. Finite Sample Identification of Partially Observed Bilinear Dynamical Systems with Yahya Sattar, Yassir Jedra, Maryam Fazel
Aaron Ames
Ben Recht
Andrew Taylor
Yisong Yue
Victor Dorobantu
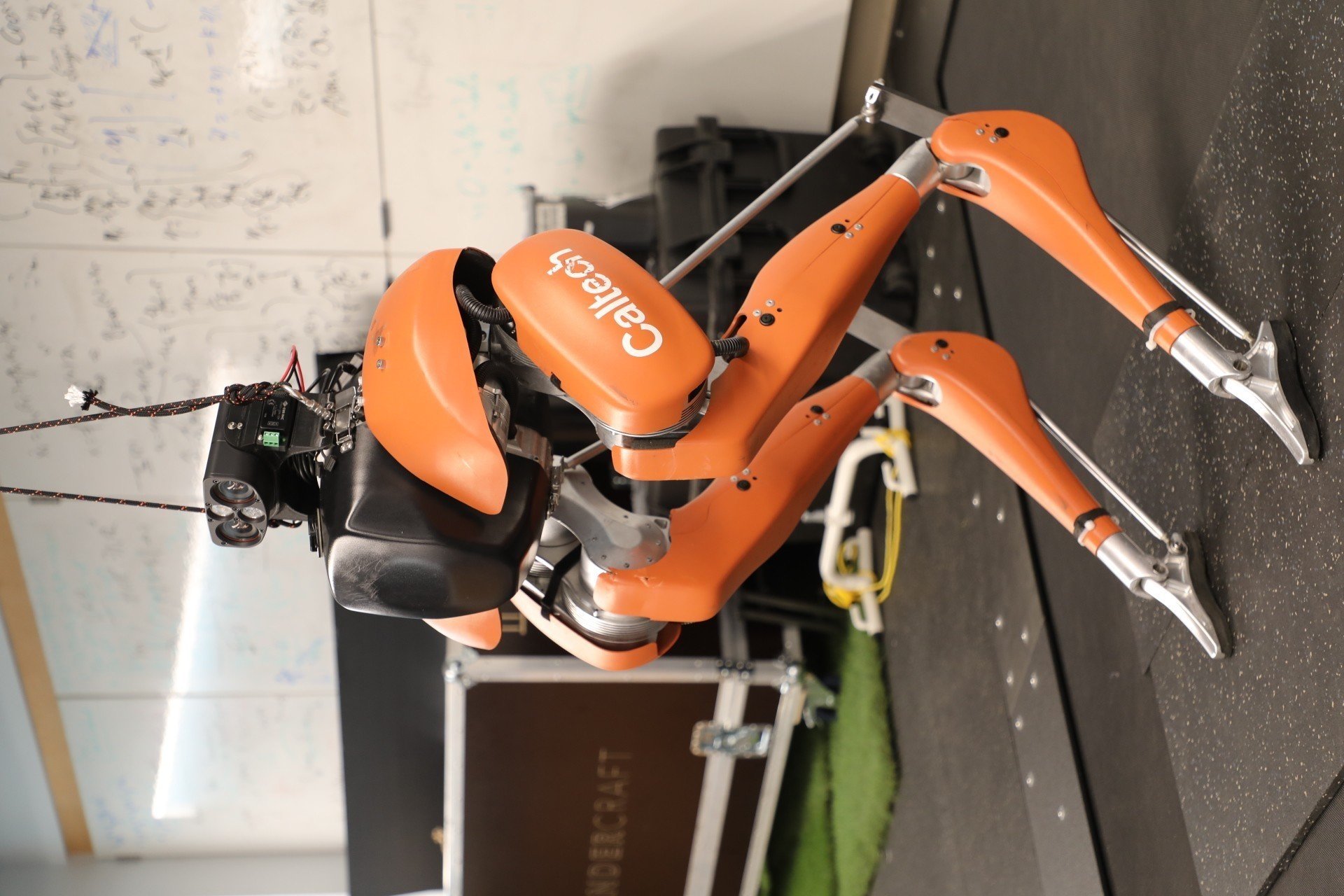
Ryan Cosner
Towards Robust Data-Driven Control Synthesis for Nonlinear Systems with Actuation Uncertainty
Nonlinear control affine dynamics
\(\mathbf x\in\mathbb R^n, \mathbf u\in\mathbb R^m\)
Goal: design \(\mathbf k\) to certify desired behavior
\(\mathbf u = \mathbf k(\mathbf x)\)
\(\dot{\mathbf x} = \mathbf f(\mathbf x)+\mathbf g(\mathbf x)\mathbf u\)
Certficate function \(C:\mathbb{R}^n\to \mathbb R\)
Comparison function \(\alpha:\mathbb{R}\to \mathbb R\)
Control Certificate Condition:
\( \dot C(\mathbf x, \mathbf u) \leq -\alpha(C(\mathbf x)) \)
\(\mathbf k(\mathbf x) \in \{\mathbf u \mid \dot C(\mathbf x, \mathbf u) \leq -\alpha(C(\mathbf x)) \}\)
\(\implies\) desired behavior
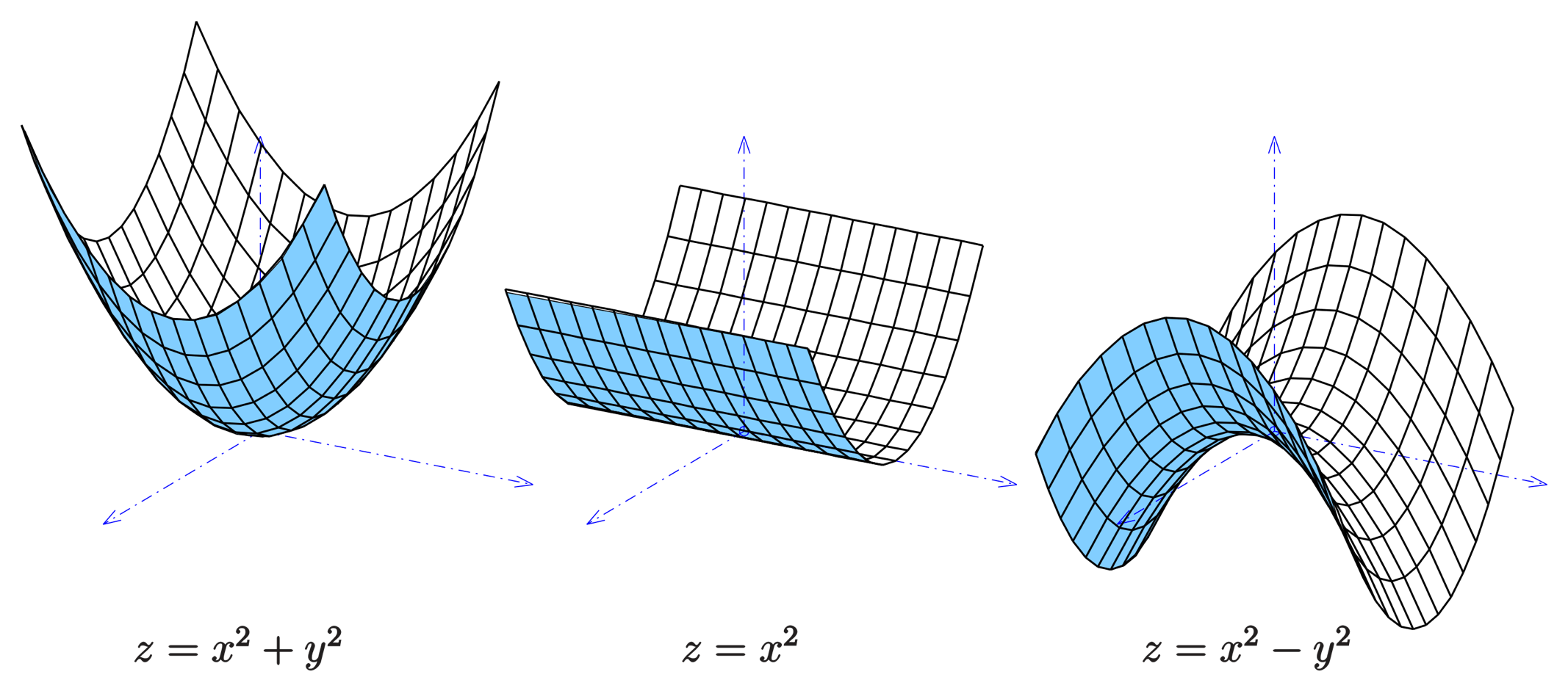
Ex: Control Lyapunov Function (stability)
Ex: Control Barrier Function (safety)
\(C(\mathbf x)\)
\(\mathbf x=0\)
\(\mathbf x\)
\(C(\mathbf x)\leq 0\)
\(\mathbf x\)
Encode control objectives on the basis of instantaneous behavior
Lyapunov function satisfying
\(\alpha_1(\|\mathbf x\|) \leq C(\mathbf x) \leq \alpha_2(\|\mathbf x\|)\)
for \(\alpha_1,\alpha_2\in\mathcal K\)
and comparison function satisfying
\(\alpha \in \mathcal K\)
then if CCF condition can be enforced, stability to the origin guaranteed
CLF-QP:
\(\mathbf k(\mathbf x) = \arg\min_{\mathbf u} \|\mathbf u - \mathbf k_d(\mathbf x)\|_2^2\)
\(\text{s.t.}~~ \dot C(\mathbf x, \mathbf u)\leq -\alpha(C(\mathbf x))\)
(Artstein, 1983; Sontag, 1989; Freeman & Kokotovic, 1996)
(Ames & Powell, 2013)
Given:
\(C(\mathbf x)\)
\(\mathbf x=0\)
\(\mathbf x\)
then if CCF condition can be enforced, safe set \(\mathcal S\) is guaranteed forward invariant.
(Ames et al., 2017)
barrier function satisfying
\(C(\mathbf x) \leq 0\iff \mathbf x\in\mathcal S\)
and comparison function
\(\alpha \in \mathcal K_e\)
CBF-QP:
\(\mathbf k(\mathbf x) = \arg\min_{\mathbf u} \|\mathbf u - \mathbf k_d(\mathbf x)\|_2^2\)
\(\text{s.t.}~~ \dot C(\mathbf x, \mathbf u)\leq -\alpha(C(\mathbf x))\)
(Ames et al. 2014, 2017)
Given
\(C(\mathbf x)\leq 0\)
\(\mathbf x\)
Example: Feedback Linearizable Systems
Control Certificate Condition:
\(K(\mathbf x) = \{\mathbf u \mid \dot C(\mathbf x, \mathbf u) = \nabla C(\mathbf x)^\top (\mathbf f(\mathbf x)+\mathbf g(\mathbf x)\mathbf u) \leq -\alpha(C(\mathbf x)) \}\)
We call \(C\) a Control Certificate Function if \(K(\mathbf x)\) is nonempty for all \(\mathbf x\)
\( L_{\mathbf f} C(\mathbf x)+ L_{\mathbf g}C(\mathbf x)\mathbf u\)
(Dimitrova & Majumdar, 2014)
(Boffi et al., 2020)
Designing CCFs is nontrivial---but not the focus today
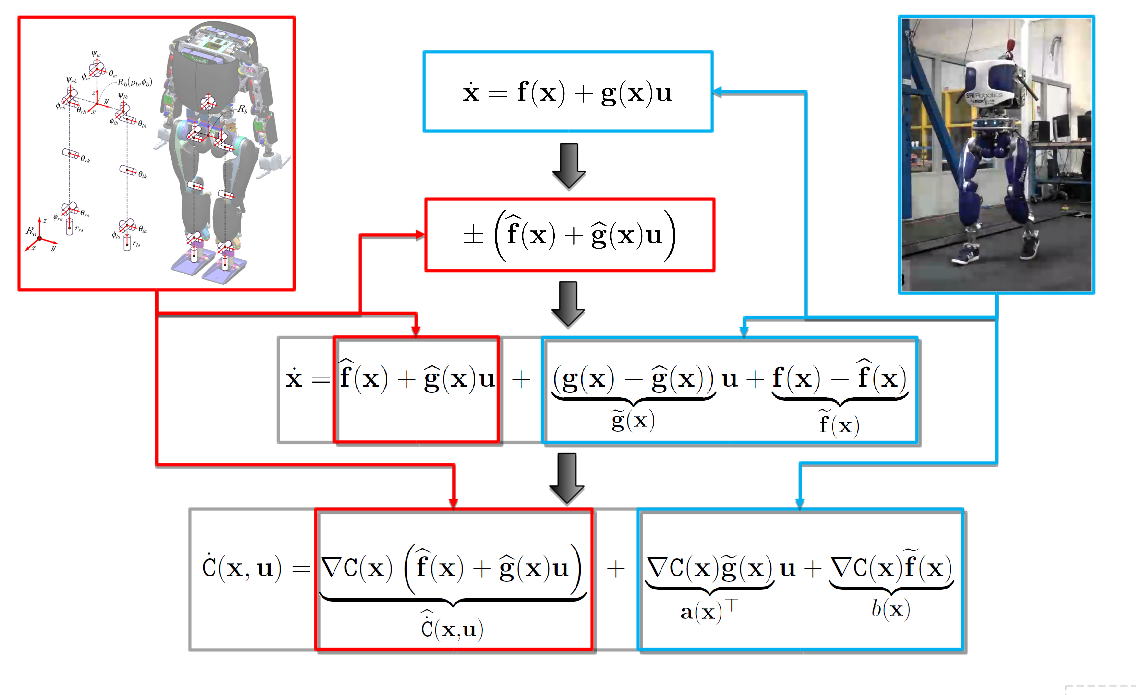
Nonlinear control affine dynamics: \(\dot{\mathbf x} = \mathbf f(\mathbf x)+\mathbf g(\mathbf x)\mathbf u\)
State observation
Unknown dynamics \(\mathbf f\) and \(\mathbf g\)
Assumptions:
Access to data \(\{(\dot{\mathbf x}_i, \mathbf x_i, \mathbf u_i)\}_{i=1}^N\)
To robustify CCF, characterize all possible \(\mathbf f\) and \(\mathbf g\) consistent with data \(\{(\dot{\mathbf x}_i, \mathbf x_i, \mathbf u_i)\}_{i=1}^N\)
Pointwise uncertainty set:
\(\mathcal U_i(\mathbf x) = \{(\mathbf a, \mathbf B) \mid \|\mathbf a + \mathbf B \mathbf u_i-\dot{\mathbf x}_i\| \leq (\mathcal L_{\mathbf f} + \mathcal L_{\mathbf g}\|\mathbf u_i\|)\|\mathbf x - \mathbf x_i\|\}\)
We can guarantee that \(\mathbf f(\mathbf x), \mathbf g(\mathbf x) \in \mathcal U_i(\mathbf x)\)
\( \|\mathbf f(\mathbf x)+\mathbf g(\mathbf x) \mathbf u_i -\dot{\mathbf x}_i \|\leq \|\mathbf f(\mathbf x)-\mathbf f(\mathbf x_i)\|+\|\mathbf g(\mathbf x) \mathbf -\mathbf g(\mathbf x_i) \|\|\mathbf u_i\|\)
\(\mathbf f(\mathbf x)+\mathbf g(\mathbf x) \mathbf u_i = \dot{\mathbf x}_i + (\mathbf f(\mathbf x)-\mathbf f(\mathbf x_i))+(\mathbf g(\mathbf x) \mathbf -\mathbf g(\mathbf x_i) )\mathbf u_i\)
\(\mathbf f(\mathbf x), \mathbf g(\mathbf x) \in \cap_{i=1}^N \mathcal U_i(\mathbf x)= \mathcal U(\mathbf x)\)
\(\begin{bmatrix} u_1\\ 1 \end{bmatrix}\)
\(\left |\begin{bmatrix} u_i\\1 \end{bmatrix}^\top\begin{bmatrix} b \\ a \end{bmatrix} - \dot{ x}_i \right|\leq \mathcal L_i |x-x_i| \)
\(\begin{bmatrix} g(x) \\f(x)\end{bmatrix}\)
\(\begin{bmatrix} u_2\\ 1 \end{bmatrix}\)
'Slice' between two planes
Width determined by \(|x-x_i|\)
Direction determined by \(u_i\)
\(\begin{bmatrix} g(x_1) \\f(x_1)\end{bmatrix}\)
R-OP:
\(\mathbf k_\mathrm{rob}(\mathbf x)=\argmin\limits_{\mathbf u \in \mathbb{R}^m} \| \mathbf u - \mathbf k_d(\widehat{\mathbf x}) \|\)
\(~~~~~~~~~\text{s.t.}~~\nabla C(\mathbf x)^\top (\mathbf a + \mathbf B\mathbf u)\leq -\alpha(C(\mathbf x))\)
\(~~~~~~~~~~~~~~~~\text{for all}~(\mathbf a, \mathbf B)\in\mathcal U(\mathbf x)\)
Main Result: R-OP is convex, equivalent to a SOCP with \(n\times N\) additional optimization variables, and guarantees that
\(\dot{C}(\mathbf x,\mathbf k_\mathrm{rob}(\mathbf x)) \leq -\alpha C(\mathbf x)\)
Feasibility Result: R-OP is feasible at \(\mathbf x\)
if and only if
\(( -\gamma\alpha(C(\mathbf x)), \mathbf 0)\notin \nabla C(x)^\top \mathcal U(\mathbf x)\) for all \(\gamma>1\)
open loop unsafe/unstable
\(\mathbb R^m\)
\(\mathbb R\)
\(\begin{bmatrix} \nabla C(\mathbf x)^\top \mathbf g(\mathbf x) \\\nabla C(\mathbf x)^\top \mathbf f(\mathbf x)\end{bmatrix}\)
\(\mathcal U_C(\mathbf x) \)
\(-\alpha(C(\mathbf x))\)
R-OP:
\(\mathbf k_\mathrm{rob}(\mathbf x)=\argmin\limits_{\mathbf u \in \mathbb{R}^m} \| \mathbf u - \mathbf k_d(\widehat{\mathbf x}) \|\)
\(~~~~~~~~~\text{s.t.}~~\nabla C(\mathbf x)^\top (\mathbf a + \mathbf B\mathbf u)\leq -\alpha(C(\mathbf x))\)
\(~~~~~~~~~~~~~~~~\text{for all}~(\mathbf a, \mathbf B)\in\mathcal U(\mathbf x)\)
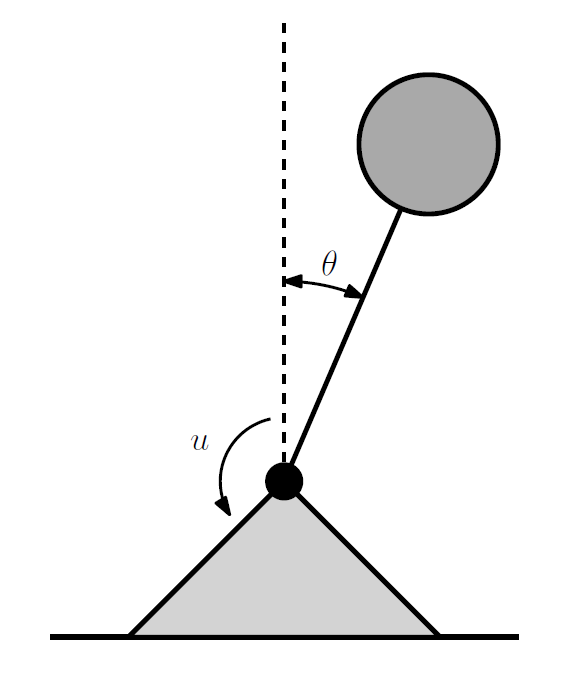
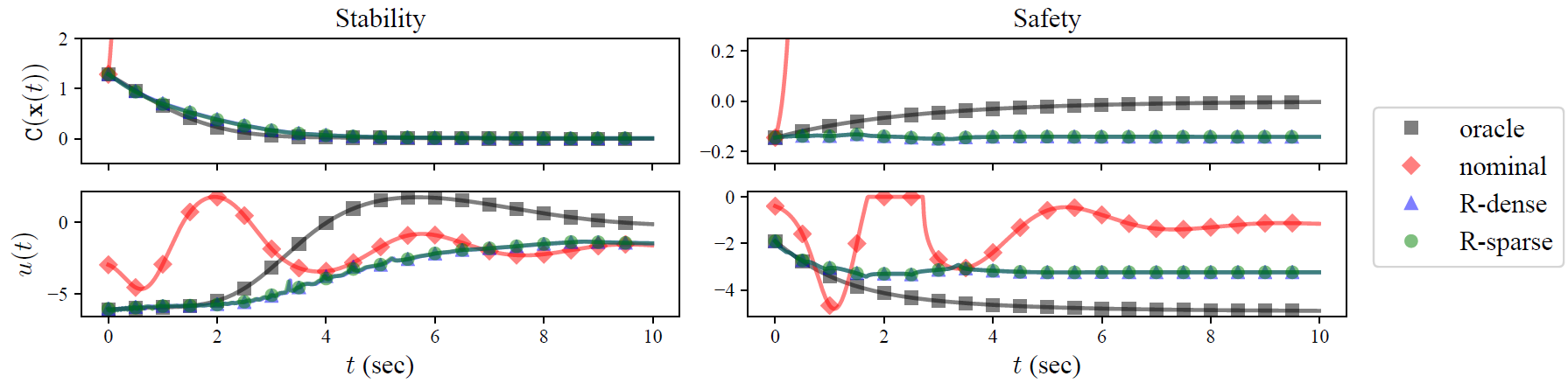
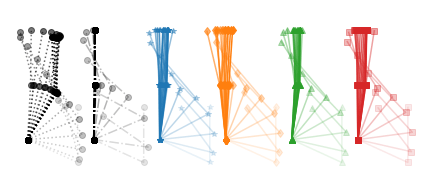
Inverted pendulum with input gain attenuation \(\propto e^{-\theta^2}\)
Stability (CLF) and safety (CBF)
Data: densely sampled states, both dense and sparsely sampled inputs
nominal controller unsafe/unstable
data-driven controllers safe/stable
sparse and dense controllers nearly identical
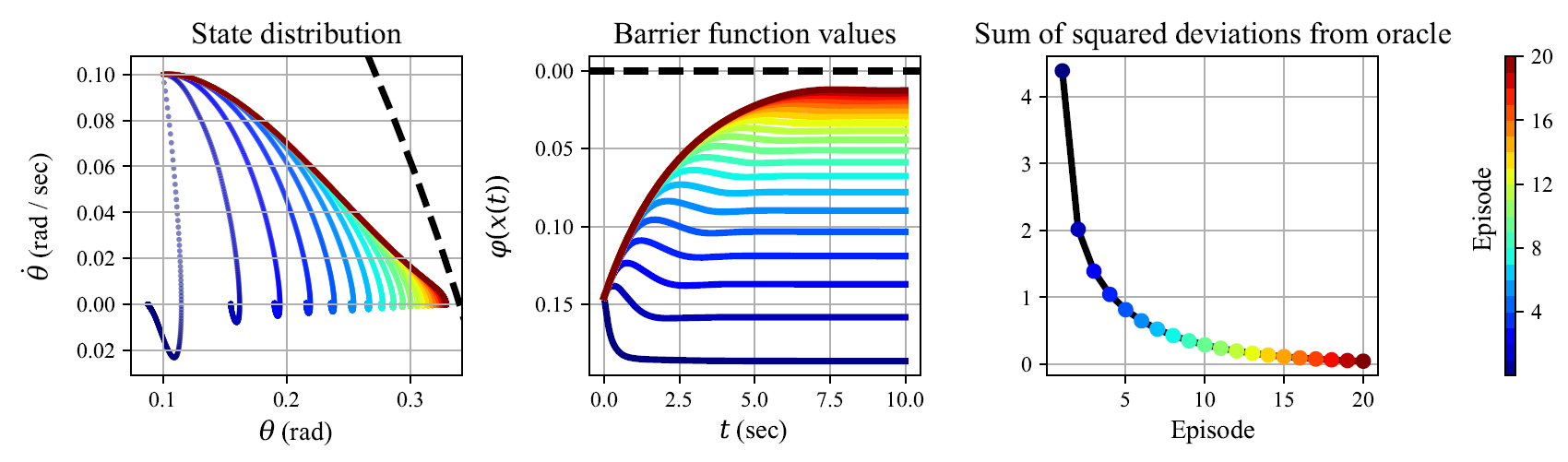
Append data from each episode and restart trajectory
Random Features Approximation for Control-Affine Systems
Yahya Sattar
Kimia Kazemian
Data \(\{(z_i, \mathbf x_i, \mathbf u_i)\}_{i=1}^N\) where \(z_i\) is posited to have a control-affine dependence on \(\mathbf x_i, \mathbf u_i\)
Ex - modelling \(j^{th}\) state coordinate
of control affine dynamics $$z_i = [\dot{\mathbf x}_i]_j = f_j(\mathbf x_i) + \mathbf g_j(\mathbf x_i)^\top \mathbf u_i$$
Ex - modelling CCF $$z_i = \dot C(\mathbf x_i,\mathbf u_i) = \nabla C(\mathbf x_i)^\top \mathbf f(\mathbf x_i) +\nabla C(\mathbf x_i)^\top \mathbf g(\mathbf x_i)^\top\mathbf u_i$$
Approach: kernel regression and random feature approximation
Given a kernel function, for generic data \(\{(z_i, \mathbf s_i)\}_{i=1}^N\), kernel ridge regression gives the predictor
Rigorous pointwise uncertainty quantification \(\sigma(\mathbf s)\) (Gaussian process)
Many kernel function are expressive enough to approximate continuous functions arbitrarily well
\(h(\mathbf s) = \mathbf k(\mathbf s)^\top (\mathbf K+\lambda \mathbf I_N)^{-1}\mathbf z \)
where \(\mathbf k(\mathbf s)_i = k(\mathbf s, \mathbf s_i),\quad \mathbf K_{ij} = k(\mathbf s_i,\mathbf s_j),\quad i,j=1,...,N\)
\(h_k(\mathbf s) = \mathbf k(\mathbf s)^\top (\mathbf K+\lambda \mathbf I_N)^{-1}\mathbf z \)
training requires \(N\times N\) matrix inversion (cubic)
prediction requires \(N\) inner products (linear)
Strategy: replace kernel function with inner products of random basis \(\mathbf \phi:\mathbb R^n\to R^D\) so \(k(\mathbf s, \mathbf s') \leftarrow \boldsymbol \psi(\mathbf s) ^\top \boldsymbol \psi(\mathbf s') \)
\(h_\psi(\mathbf s) = \boldsymbol \psi (\mathbf s)^\top (\Psi^\top \Psi+\lambda \mathbf I_D)^{-1} \Psi^\top \mathbf z \)
where \(\Psi = \begin{bmatrix} \boldsymbol \psi(\mathbf s_1) ^\top \\ \vdots \\ \boldsymbol \psi(\mathbf s_N) ^\top \end{bmatrix} \) has dimension \(N\times D\)
For large enough \(D\) and appropriately defined \(\boldsymbol \psi\), \(h_\psi\approx h_k\)
\(h_k(\mathbf s) = \mathbf k(\mathbf s)^\top (\mathbf K+\lambda \mathbf I_N)^{-1}\mathbf z \)
training requires \(N\times N\) matrix inversion (cubic)
prediction requires \(N\) inner products (linear)
Strategy: replace kernel function with inner products of random basis \(\boldsymbol \psi:\mathbb R^n\to \mathbb R^D\) so \(k(\mathbf s, \mathbf s') \leftarrow \boldsymbol \psi(\mathbf s) ^\top \boldsymbol \psi(\mathbf s') \)
\(h_\psi(\mathbf s) = \boldsymbol \psi (\mathbf s)^\top (\Psi^\top \Psi+\lambda \mathbf I_D)^{-1} \Psi^\top \mathbf z \)
training is now \(O(ND^2+D^3)\)
prediction is \(O(D)\)
For large enough \(D\) and appropriately defined \(\boldsymbol \psi\), \(h_\psi\approx h_k\)
\(\boldsymbol\theta\)
*Ali Rahimi and Benjamin Recht. Random features for large-scale kernel machines. In Proceedings of the 20th International Conference on Neural Information Processing Systems, NIPS’07
Define \( \zeta_\vartheta(s)=e^{-i2\pi\vartheta^\top s}\), then observe:
Euler's formula: \(e^{ix}= \cos x+ i \sin x\)
Strategy: replace kernel function with inner products of random basis \(k(\mathbf s, \mathbf s') \leftarrow \boldsymbol \psi(\mathbf s) ^\top \boldsymbol \psi(\mathbf s') \)
Individual kernels/feature functions (each input dimension) $$k_j(\mathbf x,\mathbf x),\quad \boldsymbol \psi_j(\mathbf {x}),\quad j=1,...,m+1$$
Affine Dot Product (ADP) Basis $$\boldsymbol \phi_c(\mathbf x,\mathbf u)=\begin{bmatrix} u_1\boldsymbol \psi_1(\mathbf x) \\ \dots \\ u_{m}\boldsymbol \psi_{m} (\mathbf x) \\ \boldsymbol \psi_{m+1}(\mathbf x) \end{bmatrix} \in \mathbb R^{D(m+1)}$$
Affine Dense (AD) Basis $$\boldsymbol \phi_d(\mathbf x,\mathbf u)=\begin{bmatrix} \boldsymbol \psi_1(\mathbf x)^\top \\ \dots \\ \boldsymbol \psi_{m} (\mathbf x)^\top \\ \boldsymbol \psi_{m+1}(\mathbf x)^\top \end{bmatrix}^\top \begin{bmatrix} \mathbf u \\ 1 \end{bmatrix} \in \mathbb R^D$$
corresponds to ADP compound kernel defined by \(k_1,...,k_{m+1}\) (Castaneda et al., 2020)
corresponds to AD compound kernel defined by \(k_1,...,k_{m+1}\) (novel)
Individual kernels/feature functions (each input dimension) $$k_j(\mathbf x,\mathbf x),\quad \boldsymbol \psi_j(\mathbf {x}),\quad j=1,...,m+1$$
Affine Dot Product (ADP) Kernel $$k_c(\mathbf {x,u,x', u'})=\sum_{j=1}^m u_j u'_j k_j(\mathbf x,\mathbf x') +k_{m+1}(\mathbf x,\mathbf x')$$
Affine Dense (AD) Kernel $$k_d(\mathbf {x,u,x', u'})=\sum_{j=1}^m u_j u'_j k_j(\mathbf x,\mathbf x') + \sum_{\ell=1}^m \sum_{j\neq \ell }^m u_j u'_\ell k_j(\mathbf x,0)k_\ell(0,\mathbf x') +k_{m+1}(\mathbf x,\mathbf x')$$
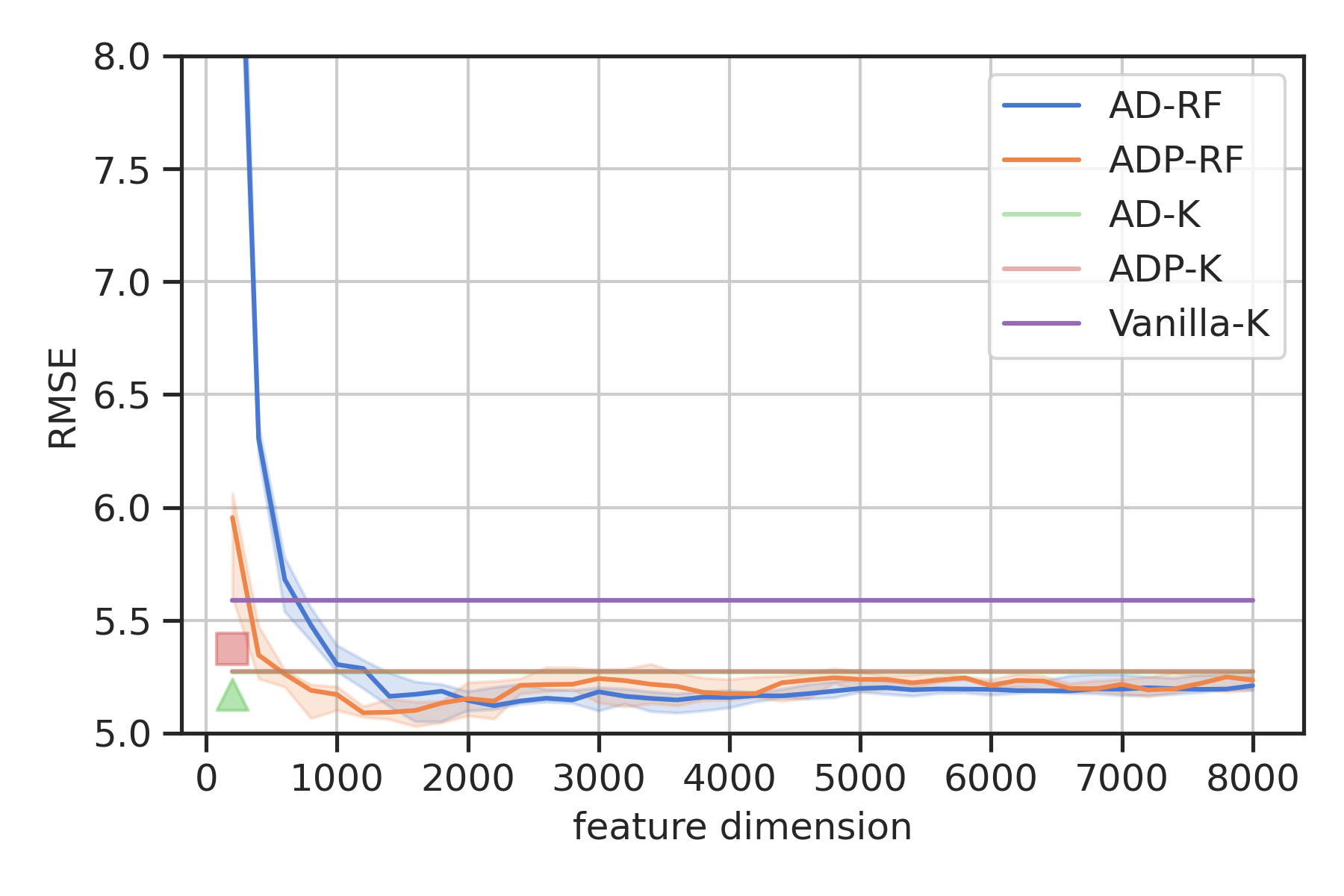
AD-K
time: \(\quad O(N^3)\)
space: \(\quad O(N^2) \)
ADP-RF
time: \(\quad O(N(D(m+1))^2)\)
space: \(\quad O(ND(m+1)) \)
AD-RF
time: \(\quad O(ND^2)\)
space: \(\quad O(ND) \)
Vanilla K
time: \(\quad O((N+m)^3)\)
space: \( \quad O((n+m)^2) \)
ADP-K
time: \( \quad O(N^3)\)
space: \(\quad O(N^2) \)
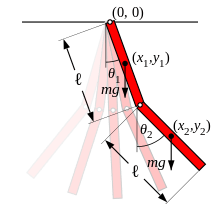
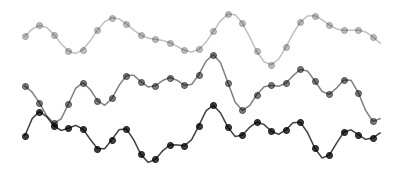
Double inverted pendulum (\(n=4,m=2)\)
Goal: Swing up (CLF)
Data: \(N=8.8\)k collected with nominal
RBF kernels and random Fourier features
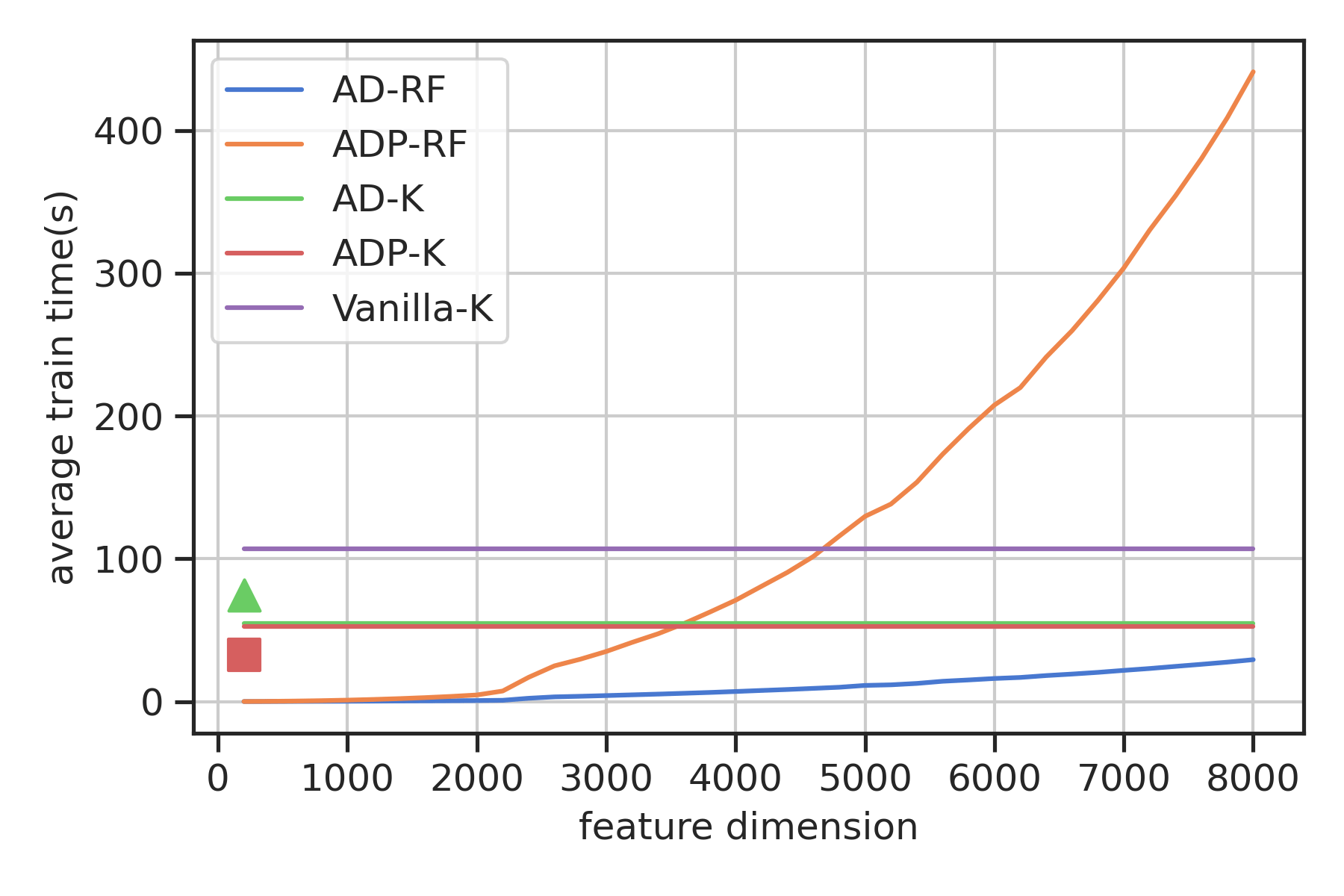
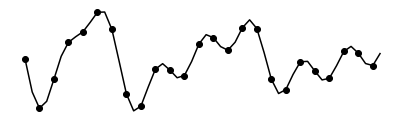
Double inverted pendulum (\(n=4,m=2)\)
Goal: Swing up (CLF)
Data: \(N=1.8\)k nominal (subsampled) \(+\) \(1\)k episodic data collection
Basis \(D=N/5\)
\(h_\psi(\mathbf x,\mathbf u) =\boldsymbol \theta^\top \boldsymbol \psi_{1:m+1}(\mathbf x)^\top \begin{bmatrix} \mathbf u \\ 1 \end{bmatrix}\)
Finite Sample Identification of Partially Observed Bilinear Dynamical Systems
Yahya Sattar
Yassir Jedra
Maryam Fazel
Can approximate control-affine dynamics via Carleman linearization (Kowalski & Steeb, 1991) or Koopman transform (Goswami & Paley, 2017)
Where:
$$\mathbf x_{t+1} = (\mathbf u_t \circ \mathbf A)\mathbf x_t + B \mathbf u_t + \mathbf w_t \\ \mathbf y_t = C \mathbf x_t + D \mathbf u_t + \mathbf z_t\qquad\quad $$
where we define
$$\mathbf u_t \circ \mathbf A = A_0 + \sum_{k=1}^m (\mathbf u_t)_k A_k$$
Can approximate control-affine dynamics via Carleman linearization (Kowalski & Steeb, 1991) or Koopman transform (Goswami & Paley, 2017)
$$\mathbf x_{t+1} = (\mathbf u_t \circ \mathbf A)\mathbf x_t + B \mathbf u_t + \mathbf w_t \\ \mathbf y_t = C \mathbf x_t + D \mathbf u_t + \mathbf z_t\qquad\quad $$
where we define
$$\mathbf u_t \circ \mathbf A = A_0 + \sum_{k=1}^m (\mathbf u_t)_k A_k$$
Output in terms of past \(L\) inputs:
$$\mathbf y_t = \sum_{\ell=1}^L C \left( \prod_{i=1}^{\ell-1} (\mathbf u_{t-i} \circ \mathbf A) \right) B \mathbf u_{t-\ell} + D \mathbf u_t + \text{noise and error} $$
Truncation error:
$$C \left( \prod_{\ell=1}^L (\mathbf u_{t-\ell} \circ \mathbf A) \right) \mathbf x_{t-L} $$
Process and measurement noise: $$\sum_{\ell=1}^L C \left( \prod_{i=1}^{\ell-1} (\mathbf u_{t-i} \circ \mathbf A) \right) \mathbf w_{t-\ell} + \mathbf v_t $$
\(t\)
\(L\)
\(\underbrace{\qquad\qquad}\)
inputs
outputs
time
Define:
Then:
$$y_t = \tilde{G} \tilde{u}_t + F \tilde{w}_t + \epsilon_t $$
Output in terms of past \(L\) inputs:
$$\mathbf y_t = \sum_{\ell=1}^L C \left( \prod_{i=1}^{\ell-1} (\mathbf u_{t-i} \circ \mathbf A) \right) B \mathbf u_{t-\ell} + D \mathbf u_t + \text{noise and error} $$
\(t\)
\(L\)
\(\underbrace{\qquad\qquad}\)
inputs
outputs
time
$$\mathbf y_t = {G} \tilde{\mathbf u}_t + \text{noise and error} $$
$$\mathbf y_t = {G} \tilde{\mathbf u}_t + \text{noise and error} $$
$$\hat{G} := \left( \sum_{t=L}^T \mathbf y_t \tilde{\mathbf u}_t^\top \right) \left( \sum_{t=L}^T \tilde{\mathbf u}_t \tilde{\mathbf u}_t^\top \right)^\dagger $$
Theorem (Informal):
Under i.i.d. uniform inputs, stability, and sub-Gaussian noise assumptions, with high probability:
$$\|\hat{G} - G\| \lesssim \sqrt{\frac{m^2 L(m+1)^{L+1} (\log(L/\delta)+p+nL)}{(T-L)(1-\rho)}} $$
$$\lambda_{\min} \left( \sum_{t=L}^T \tilde{u}_t \tilde{u}_t^\top \right) \geq \frac{T-L}{4} $$
Theorem (Informal):
Under i.i.d. uniform inputs, stability, and sub-Gaussian noise assumptions, with high probability:
$$\|\hat{G} - G\| \lesssim \sqrt{\frac{m^2 L(m+1)^{L+1} (\log(L/\delta)+p+nL)}{(T-L)(1-\rho)}} $$
By Sarah Dean




