STANCE
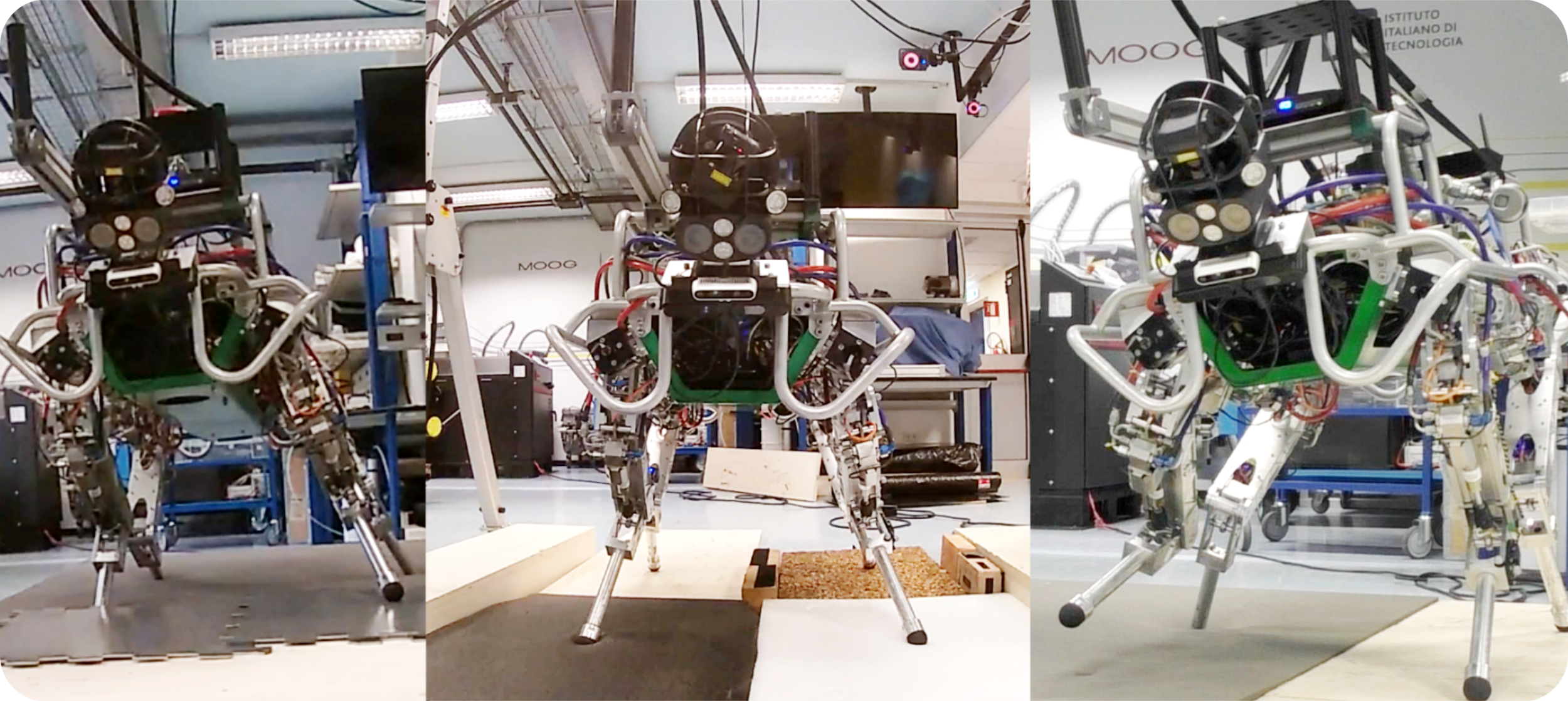
Locomotion Adaptation over Soft Terrain
Shamel Fahmi, Michele Focchi, Andreea Radulescu, Geoff Fink, Victor Barasuol and Claudio Semini
Dynamic Legged Systems (DLS) lab, Istituto Italiano di Tecnologia (IIT)
Dynamic Walking
May 2020

taken from Andrea del Prete, 2019
Shamel Fahmi
-
Most WBCs are not terrain aware. They fail to generalize beyond rigid terrain.
-
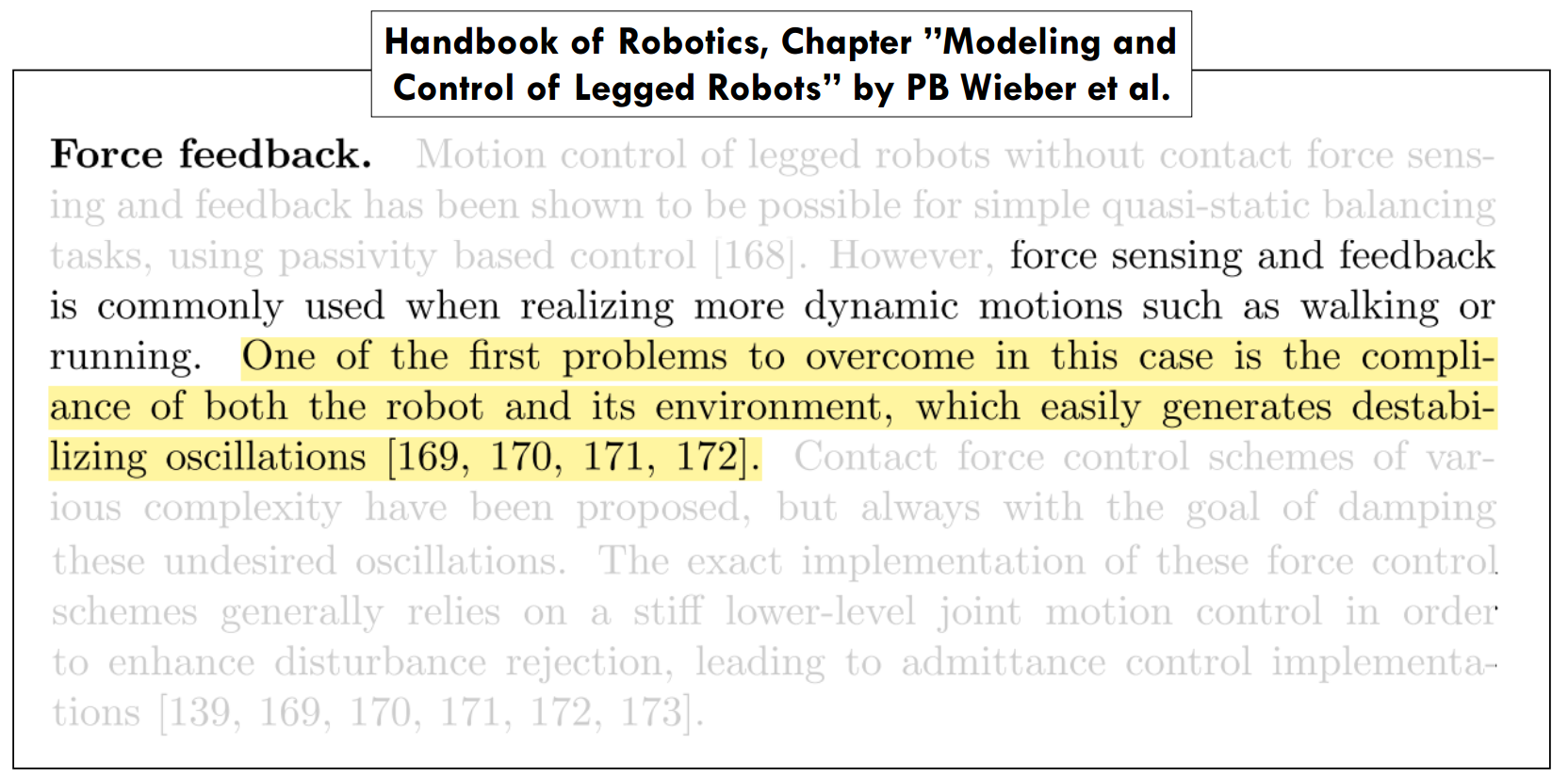
Soft terrain locomotion by itself is difficult because of the induced contact dynamics
-
Mismatch between what the WBC assumes vs. what is actually happening

Shamel Fahmi
-
Drop the assumption of the rigid terrain. Use a more generic model that accounts for the terrain impedance
-
But that’s not enough, how do you know the impedance parameters of the terrain.
-
Hmm, estimate it?
Shamel Fahmi

Shamel Fahmi
Soft Terrain Adaptation aNd Compliance Estimation
(STANCE)
Shamel Fahmi
Shamel Fahmi
-
STANCE
-
Adapt online to any type of terrain compliance
-
C3WBC
-
Extends the sWBC but incorporating soft contact dynamics
-
C3WBC can adapt to the given terrain compliance
-
-
TCE
-
Estimate the terrain compliance online
-
Not computationally expensive
-
-
Shamel Fahmi
-
State Estimation
-
Low level torque control
-
Limitations of STANCE
-
Future Directions
-
State Estimation
-
Model Predictive Control
Shamel Fahmi
O. Villarreal et.al., ''MPC-based Controller with Terrain Insight for Dynamic Legged Locomotion'', ICRA 2020
HyQ Real Highlights



coming soon ;)






STANCE in a nutshell
By Shamel Fahmi
STANCE in a nutshell
This is the 5 minutes presentation that I gave at Dynamic Walking 2020.




