ruby on robots

@artooio #ruby #robots
@solojavier @ruby_gdl
"The future is already here, it's just not evenly distributed"
William Gibson
La re-evolución robótica esta aquí
Qué es artoo?
Framework para robótica escrito en ruby.
Provee una interfaz simple (pero poderosa)
para crear soluciones que incorporen
múltiples dispositivos de hardware
Dispositivos soportados
















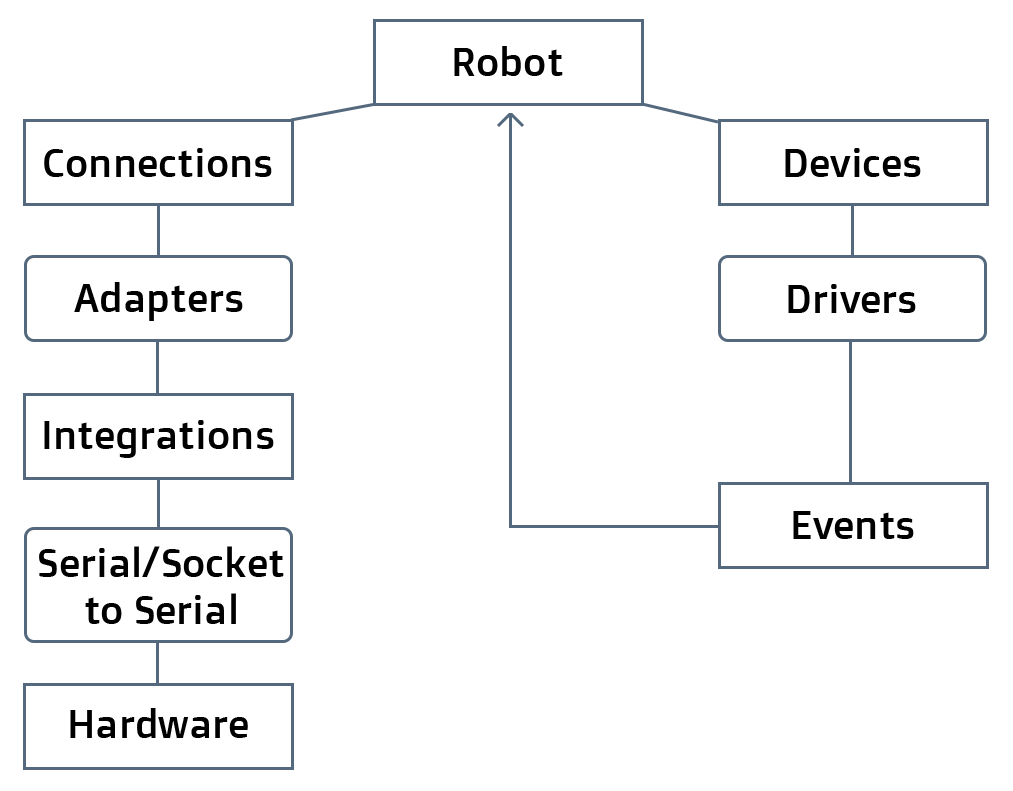
Cómo funciona?
Conceptualmente influenciado por Sinatra
Arquitectura soporta concurrencia
y multi-hilos mientras se ejecute
en una version de ruby que lo soporte
(JRuby/Rubinius)
Creado utilizando Celluloid, Celulloid::IO y Reel
Instalación
rvm install rbx-2.1.1
gem install artoo
gem install artoo-sphero
ruby robot_code.rb
Ejemplos
Arduino + LED + botón
require 'artoo' connection :arduino, :adaptor => :firmata, :port => '/dev/ttyACM0' device :led, :driver => :led, :pin => 13 device :button, :driver => :button, :pin => 2 work do on button, :push => proc {led.toggle} end
Parrot ARDrone 2.0
require 'artoo' connection :ardrone, :adaptor => :ardrone device :drone, :driver => :ardrone work do drone.start drone.take_off after(25.seconds) { drone.hover.land } after(30.seconds) { drone.stop } end
sphero + arduino + wii chuck

Demo
Y ahora?
Artoo docs
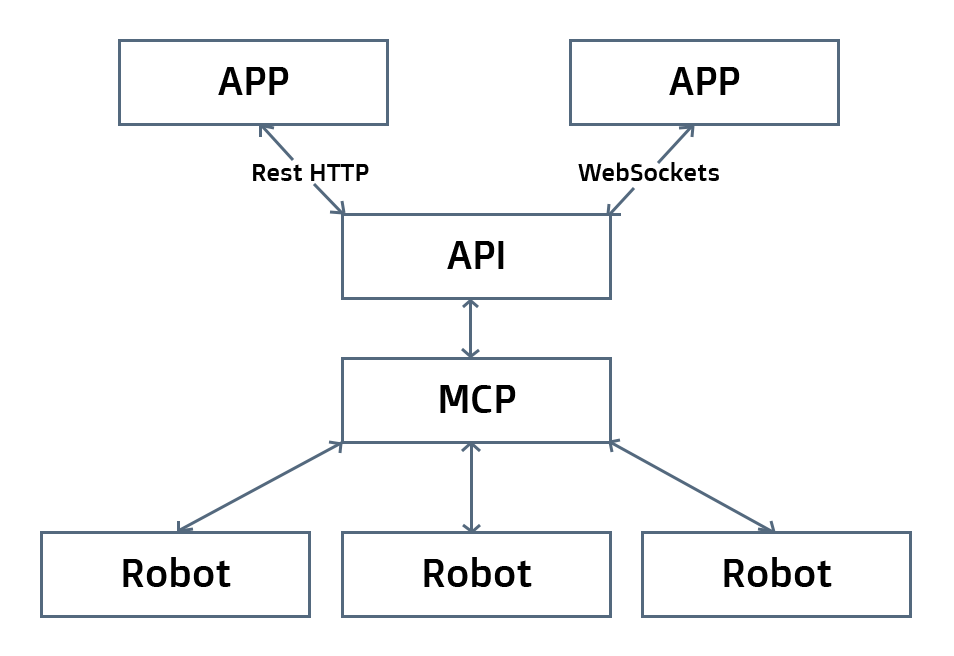
RobotOps
Proyectos hermanos
Re-evolución robótica
Pasa la voz
#rubyOnRobots
#robotOps
#losrobots
#artoo
@artoio @hybrid_group @ruby_gdl
ruby on robots : artoo
By solojavier
ruby on robots : artoo
Presentation of ruby robotics framework "artoo". First presented on RubyGDL



