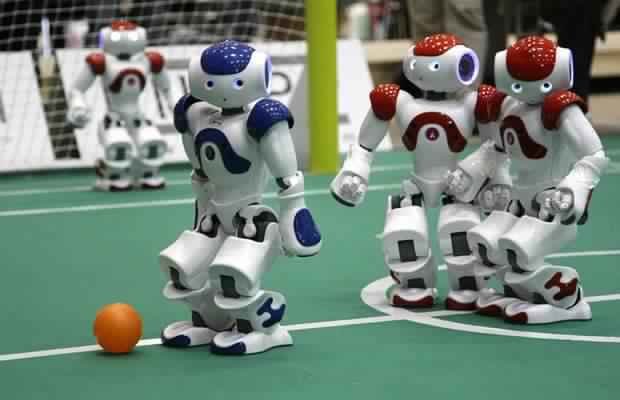
RoboCup
- Construire des groupes de robots capables de jouer à un sport collectif (ressemblant au football)
- Représentatif des contraintes qui pèsent sur la conception de systèmes multi-agents
- action & perception locales
- pas de coordination globale
- nécessité de coopération
- Confronte des techniques essentiellement logicielles à un environnement dynamique réel
- Imperfection de la perception et de la communication
- Incomplétude de l'information
- Hiatus entre intention (prévision) et action
- Possibilités de pannes

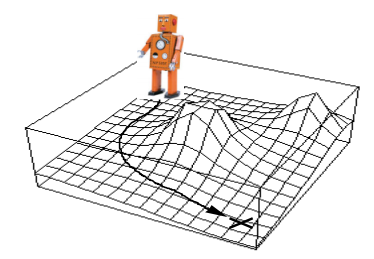
CRASH: Navigation (1)
- Les forces s'appliquant sur un agent sont définies comme le gradient d'un champ de potentiel
- Les buts sont des champs attractifs
- Les obstacles des champs répulsifs
- Le mouvement d'un agent s'obtient par combinaison de ces forces
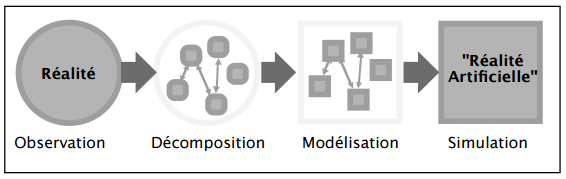
Simulation multi-agents (1)
- Créer un monde artificiel composé d'agents en interaction
- Trois composantes
- les agents
- les règles de comportement
- l'environnement
- Les agents agissent et modifient l'environnement
- On observe le résultats de leurs interactions comme si l'on était dans un laboratoire (notion de laboratoire virtuel)

Simulation multi-agent (2)
-
Etude des sociétés humaines et naturelles
- Possibilité de modéliser de façon isomorphe les objets d’études des sciences humaines et naturelles
- Possibilité de choisir le niveau d’analyse du domaine, ainsi que de combiner plusieurs types d’expertise
- Possibilité de modéliser les comportements, pas seulement leur résultante
-
Apports pour la réalisation de sociétés d’agents artificiels
- Possibilité d’étudier des modes d’organisation, des méthodes de résolution collective de problème existant dans la réalité
-
Possibilité de découvrir de nouvelles analogies, de nouvelles métaphores, qui ne soient pas simplement des métaphores «de surface»
- pas inépuisables
- diffciles de les enrichir car souvent intuitives
- diffciles à opérationnaliser
Crowd / Agent Interactions
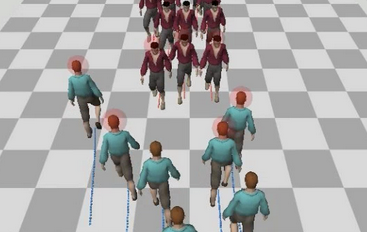

Résolution de conflits
& Négociation
-
usage de schémas de négociation entre agents pour résoudre les conflits d'objectifs et de ressources par la recherche d'un accord Ex: par analogie avec les médiations dans les conflits syndicats/entreprises (Persuader, Sycara 89):
-
génération d'une proposition,
-
d'une contre-proposition,
-
développement d'une argumentation
-
-
en fonction des buts (avoués ou cachés) des agents
-
pour que les agents participent à des simulacres de processus sociaux, il faut les doter de capacités :
-
de communication
-
de représentation de soi et des autres
-
de planification et révision du comportement
-
de manipulation de croyances, d'intentions, et de buts.
-
C o m m u n i c a t i o n
- Pourquoi communiquer ? :
- support de l'interaction et de la coopération
- Comment communiquer ? :
- description des éléments de la communication
- théorie des actes de langage
- KQML
- Que communiquer ?
- Avec qui communiquer ?
- problème de contrôle (dépendant du domaine?)
- notion d'accointance: on ne s'adresse pas à tout le monde de la même manière (MACE, [Gasser 87])
La représentation des autres
- Pourquoi représenter ? pour raisonner sur les interactions avec les autres agents
-
Types de représentation nécessaire à la coopération :
- qui sait faire quoi : les compétences
- qui fait quoi : les tâches exécutées
- qui sait quoi : l'information disponible
- qui souhaite quoi : les intentions, les buts
- qui est engage à quoi : les engagements
Cooperation
- Les agents travaillent à la satisfaction d’un but commun, ou individuels.
-
On distingue deux modèles de coopérations :
- Collaboration par répartition des taches
- Coordination d’actions et résolution de conflits
Cas d'allocation de tâches
- Plusieurs solutions possibles:
- allocation centralisée : classique en informatique
- allocation par accointances : vient des langages d'acteurs
- allocation par appel d'offres : inspirée de méthodes réelles et permet de résoudre un problème informatique, l'allocation dynamique de tâches, par une analogie avec les mécanismes d'appels d'offres dans les marchés publics :
On est passé de comment répartir des tâches ? à comment un agent choisit-il ses collaborateurs ?
=> l'allocation de tâches est devenue la collaboration
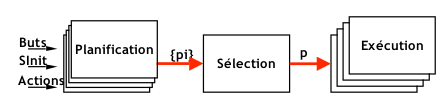
Allocation centralisée
- un système (ou agent) central planifie et distribue les plans aux agents, en résolvant les problèmes de synchronisation et d'allocation de ressources :
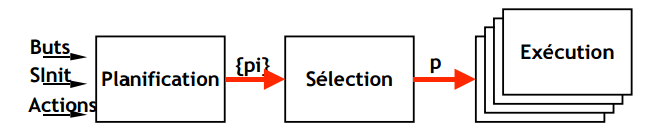
les autres agents sont simplement des exécutants
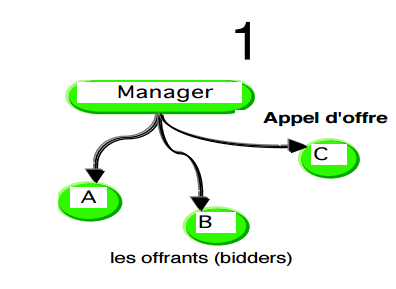
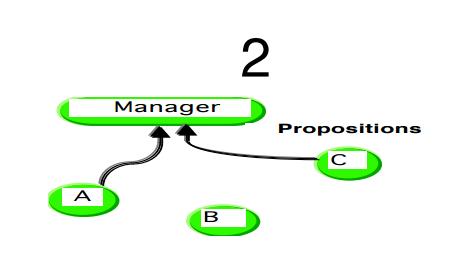
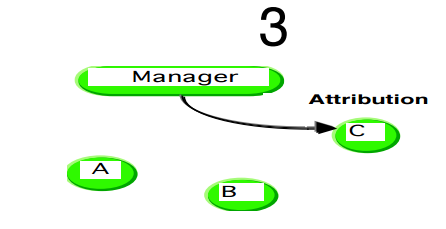
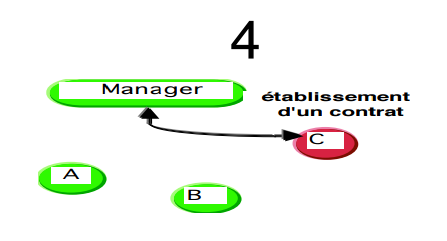
Allocation par appel d'offres
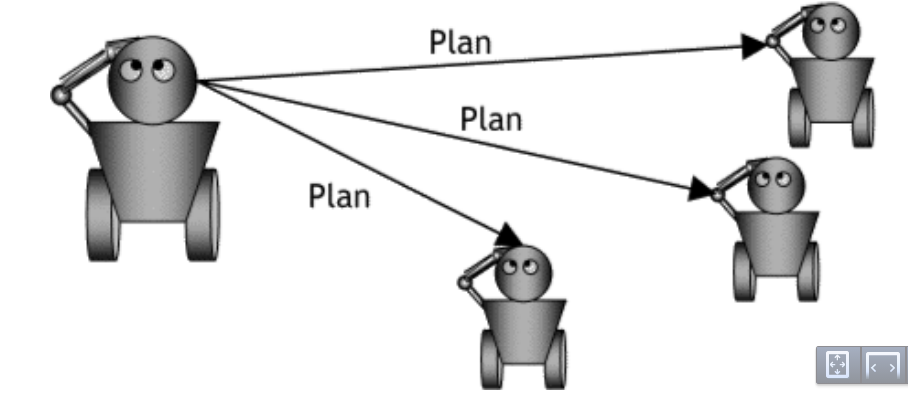
Coordination centralisée
- la planification est distribuée, mais la coordination des plans individuels est centralisée :
les autres agents sont simplement des exécutants
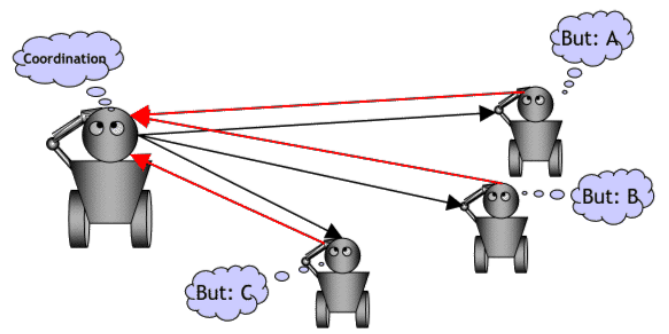
Coordination Distribuée
• la planification, comme la coordination des plans, sont distribués :

Conlusion
Think outside the box
presentation IA
By Wael Chargui


