View-Based Maps
EC EN 631
Robotic Vision
Matching Views
-
Compact Randomized Tree Signatures
-
Prefilter for Place Recognition
-
Geometric Consistency Check
-
Experiments Results
Compact Randomized Tree Signatures
- Its a feature descriptor like SIFT, SURF or ORB
- Small dataset is chosen
- Base keypoints are extracted with a fixed pattern or FAST with some constraints
- Random Tree classifier is trained
V. Lepetit and P. Fua. Keypoint recognition using randomized trees
Compact Randomized Tree Signatures
Text
Text
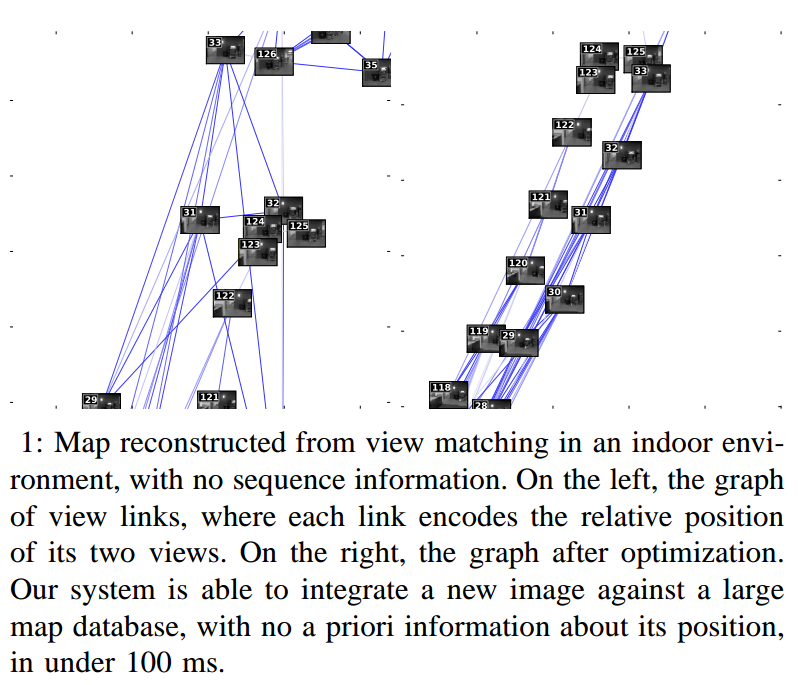
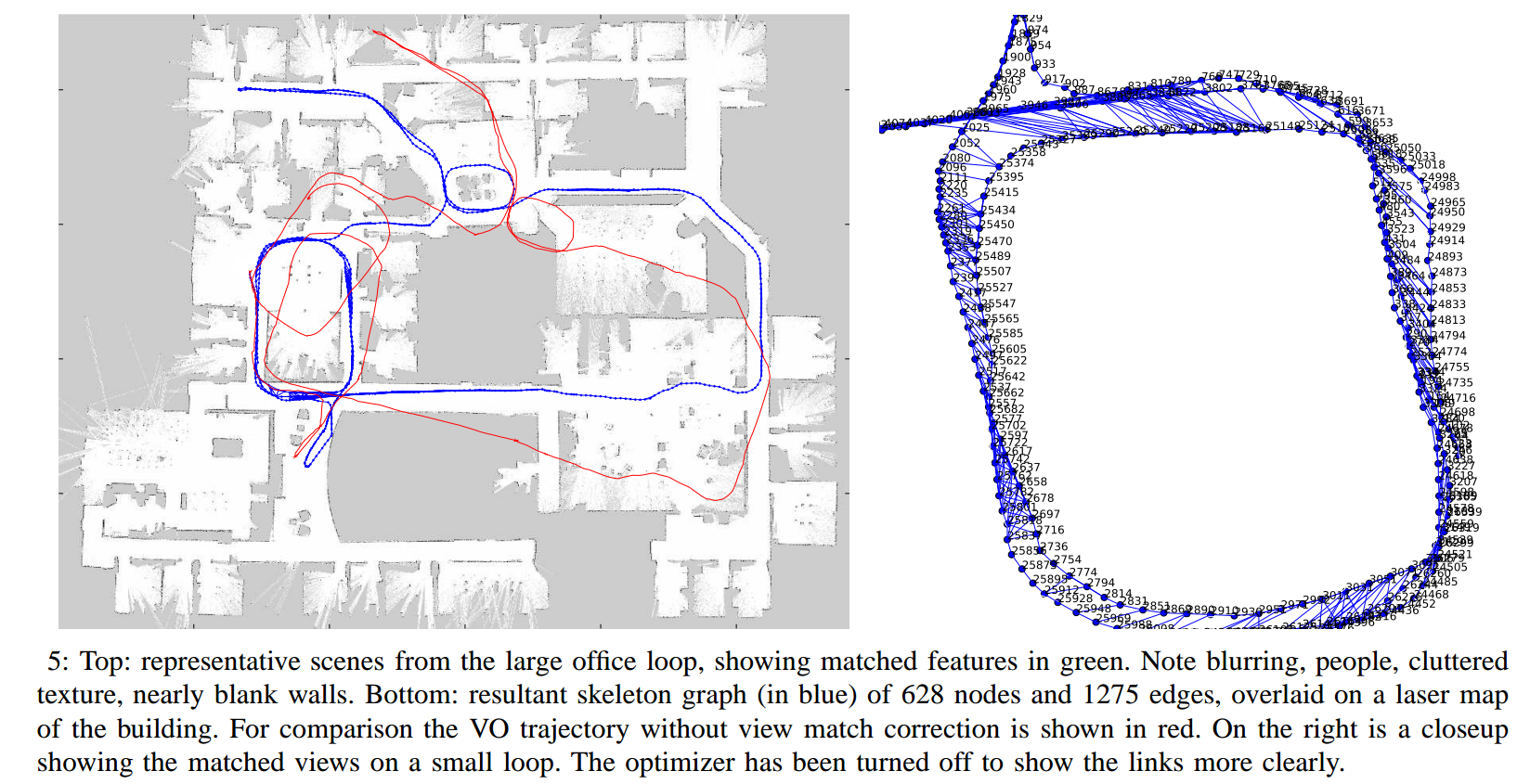
View-based map
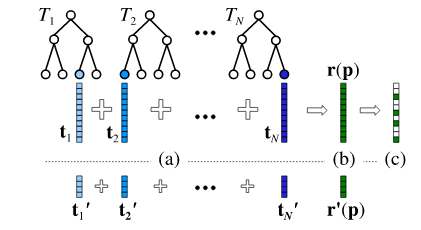
Compact Randomized Tree Signatures
- Signatures are sparse and take lots of computational time
- Use PCA or random orthogonal vector multiplication to make it dense
- This feature representation is very fast than SIFT
- Thus for a new key point not in the base set, a new signature can be created
Vocabulary Trees
- Similar to the bags-of-word model
- Used for large vocabulary
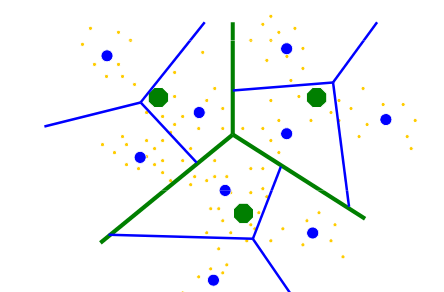
- Tree construction
Vocabulary Trees
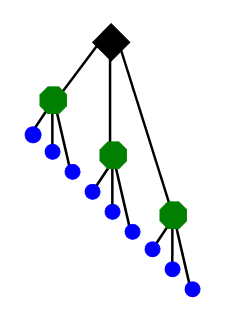

Tree: Training
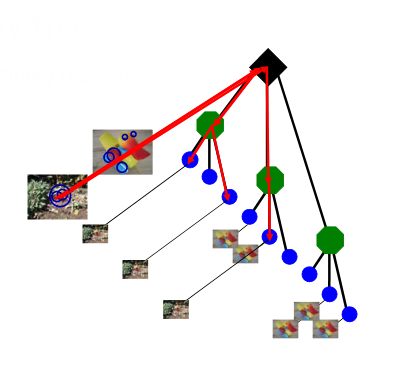
Vocabulary Trees
Tree: Recognition
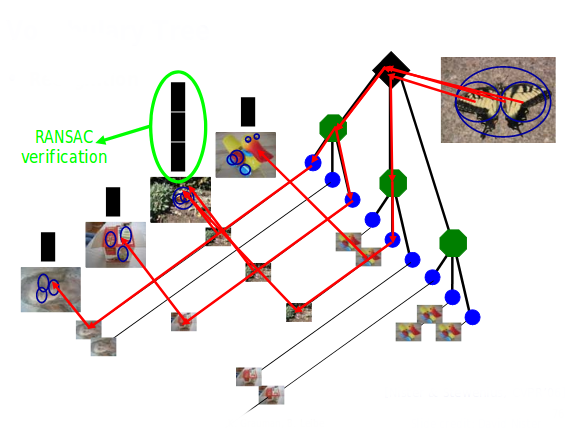
Geometric Consistency Check
- Features matching (left image to left image)
- Pick 3 candidates and generate relative motion hypothesis
- Project the 3D points from one view to other and count inliers
- Keep the hypothesis with best inliers
- Do nonlinear estimation of the relative pose
Statistics of matched points
- Using the binomial distribution for inliers a rejection filter rejects the false positives
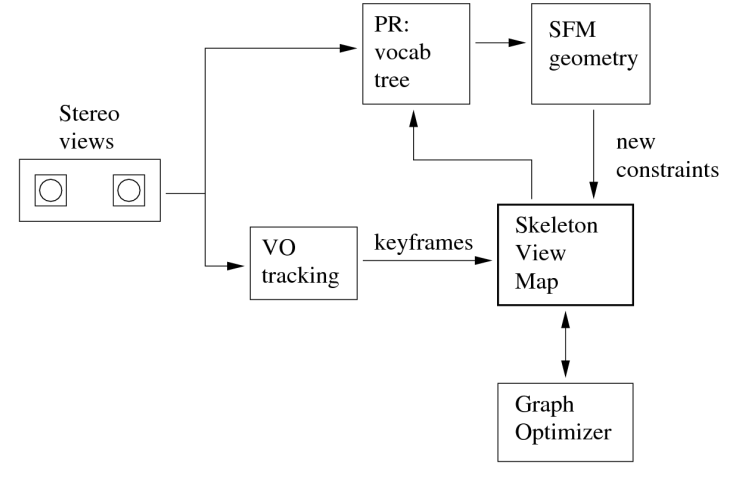
Bigger Picture
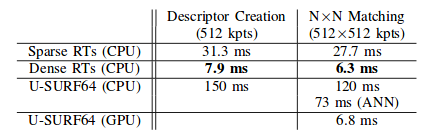
Experiments
Experiments
Experiments
Thank You!
viewmap
By Aadesh Neupane
viewmap
Class presentation for ECEN631




