Utilizing low-cost unmanned aerial vehicles (UAV) to build orthophotos and Digital Surface Models (DSM)
Britta Ricker, PhD
USGS Brown bag Seminar Dec. 16, 2015

About my research





Outline
- Harnessing the hype
- Brief History
- Planning a project
- Mapping products
- Additional Considerations
- Future

How can we
harness the hype
of accessible technology
to make maps!
image processing
photogrammetry: science of making measurements from photographs, especially for recovering the exact positions of surface points.
http://www.cs.columbia.edu/~jebara/htmlpapers/SFM/node4.html
and http://www.cs.columbia.edu/~jebara/htmlpapers/SFM/sfm.html
Photogrammetry
stability
accuracy
implementation
Structure from Motion
Evolved out of computer vision
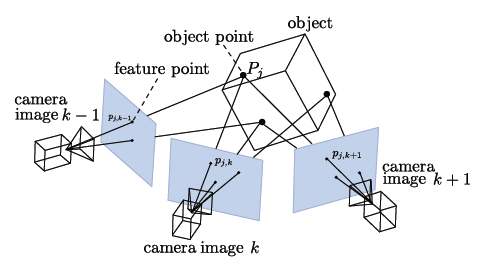
Ties images together
More images = more tie points
scale of image
tied by metadata
tied by pixel values
// C++
#include <math.h>
#include <sstream>
#include <fstream>
// This
#include "OdmOrthoPhoto.hpp"
std::ostream & operator<< (std::ostream &os, const WorldPoint &worldPoint)
{
return os << worldPoint.eastInteger_ + worldPoint.eastFractional_ << " " << worldPoint.northInteger_ + worldPoint.northFractional_;
}
std::istream & operator>> (std::istream &is, WorldPoint &worldPoint)
{
is >> worldPoint.eastInteger_;
// Check if east coordinate is given as rational.
if('.' == is.peek())
{
is >> worldPoint.eastFractional_;
}
else
{
worldPoint.eastFractional_ = 0.0f;
}
is >> worldPoint.northInteger_;
// Check if north coordinate is given as rational.
if('.' == is.peek())
{
is >> worldPoint.northFractional_;
}
else
{
worldPoint.northFractional_ = 0.0f;
}
return is;
}
OdmOrthoPhoto::OdmOrthoPhoto()
:log_(false)
{
inputFile_ = "";
inputGeoRefFile_ = "";
outputFile_ = "ortho.jpg";
logFile_ = "log.txt";
outputCornerFile_ = "";
resolution_ = 0.0f;
boundaryDefined_ = false;
boundaryPoint1_[0] = 0.0f; boundaryPoint1_[1] = 0.0f;
boundaryPoint2_[0] = 0.0f; boundaryPoint2_[1] = 0.0f;
boundaryPoint3_[0] = 0.0f; boundaryPoint3_[1] = 0.0f;
boundaryPoint4_[0] = 0.0f; boundaryPoint4_[1] = 0.0f;
}
OdmOrthoPhoto::~OdmOrthoPhoto()
{
}
int OdmOrthoPhoto::run(int argc, char *argv[])
{
try
{
parseArguments(argc, argv);
createOrthoPhoto();
}
catch (const OdmOrthoPhotoException& e)
{
log_.setIsPrintingInCout(true);
log_ << e.what() << "\n";
log_.print(logFile_);
return EXIT_FAILURE;
}
catch (const std::exception& e)
{
log_.setIsPrintingInCout(true);
log_ << "Error in OdmOrthoPhoto:\n";
log_ << e.what() << "\n";
log_.print(logFile_);
return EXIT_FAILURE;
}
catch (...)
{
log_.setIsPrintingInCout(true);
log_ << "Unknown error, terminating:\n";
log_.print(logFile_);
return EXIT_FAILURE;
}
log_.print(logFile_);
return EXIT_SUCCESS;
}
void OdmOrthoPhoto::parseArguments(int argc, char *argv[])
{
logFile_ = std::string(argv[0]) + "_log.txt";
log_ << logFile_ << "\n\n";
// If no arguments were passed, print help.
if (argc == 1)
{
printHelp();
}
log_ << "Arguments given\n";
for(int argIndex = 1; argIndex < argc; ++argIndex)
{
log_ << argv[argIndex] << '\n';
}
log_ << '\n';
for(int argIndex = 1; argIndex < argc; ++argIndex)
{
// The argument to be parsed.
std::string argument = std::string(argv[argIndex]);
if(argument == "-help")
{
printHelp();
}
else if(argument == "-resolution")
{
++argIndex;
if (argIndex >= argc)
{
throw OdmOrthoPhotoException("Argument '" + argument + "' expects 1 more input following it, but no more inputs were provided.");
}
std::stringstream ss(argv[argIndex]);
ss >> resolution_;
log_ << "Resolution count was set to: " << resolution_ << "pixels/meter\n";
}
else if(argument == "-boundary")
{
if(argIndex+8 >= argc)
{
throw OdmOrthoPhotoException("Argument '" + argument + "' expects 8 more input following it, but no more inputs were provided.");
}
std::stringstream ss;
ss << argv[argIndex+1] << " " << argv[argIndex+2] << " " << argv[argIndex+3] << " " << argv[argIndex+4] << " " << argv[argIndex+5] << " " << argv[argIndex+6] << " " << argv[argIndex+7] << " " << argv[argIndex+8];
ss >> worldPoint1_ >> worldPoint2_ >> worldPoint3_ >> worldPoint4_;
boundaryDefined_ = true;
argIndex += 8;
log_ << "Boundary point 1 was set to: " << worldPoint1_ << '\n';
log_ << "Boundary point 2 was set to: " << worldPoint2_ << '\n';
log_ << "Boundary point 3 was set to: " << worldPoint3_ << '\n';
log_ << "Boundary point 4 was set to: " << worldPoint4_ << '\n';
}
else if(argument == "-boundaryMinMax")
{
if(argIndex+4 >= argc)
{
throw OdmOrthoPhotoException("Argument '" + argument + "' expects 4 more input following it, but no more inputs were provided.");
}
std::stringstream ss;
ss << argv[argIndex+1] << " " << argv[argIndex+2] << " " << argv[argIndex+3] << " " << argv[argIndex+4];
ss >> worldPoint1_ >> worldPoint3_;
boundaryDefined_ = true;
// Set the other world points as the other two corners.
worldPoint2_.eastFractional_ = worldPoint1_.eastFractional_;
worldPoint2_.eastInteger_ = worldPoint1_.eastInteger_;
worldPoint2_.northFractional_ = worldPoint3_.northFractional_;
worldPoint2_.northInteger_ = worldPoint3_.northInteger_;
worldPoint4_.eastFractional_ = worldPoint3_.eastFractional_;
worldPoint4_.eastInteger_ = worldPoint3_.eastInteger_;
worldPoint4_.northFractional_ = worldPoint1_.northFractional_;
worldPoint4_.northInteger_ = worldPoint1_.northInteger_;
argIndex += 4;
log_ << "Boundary point 1 was set to: " << worldPoint1_ << '\n';
log_ << "Boundary point 2 was set to: " << worldPoint2_ << '\n';
log_ << "Boundary point 3 was set to: " << worldPoint3_ << '\n';
log_ << "Boundary point 4 was set to: " << worldPoint4_ << '\n';
}
else if(argument == "-verbose")
{
log_.setIsPrintingInCout(true);
}
else if (argument == "-logFile")
{
++argIndex;
if (argIndex >= argc)
{
throw OdmOrthoPhotoException("Missing argument for '" + argument + "'.");
}
logFile_ = std::string(argv[argIndex]);
std::ofstream testFile(logFile_.c_str());
if (!testFile.is_open())
{
throw OdmOrthoPhotoException("Argument '" + argument + "' has a bad value.");
}
log_ << "Log file path was set to: " << logFile_ << "\n";
}
else if(argument == "-inputFile")
{
argIndex++;
if (argIndex >= argc)
{
throw OdmOrthoPhotoException("Argument '" + argument + "' expects 1 more input following it, but no more inputs were provided.");
}
inputFile_ = std::string(argv[argIndex]);
log_ << "Reading textured mesh from: " << inputFile_ << "\n";
}
else if(argument == "-inputGeoRefFile")
{
argIndex++;
if (argIndex >= argc)
{
throw OdmOrthoPhotoException("Argument '" + argument + "' expects 1 more input following it, but no more inputs were provided.");
}
inputGeoRefFile_ = std::string(argv[argIndex]);
log_ << "Reading georef from: " << inputGeoRefFile_ << "\n";
}
else if(argument == "-outputFile")
{
argIndex++;
if (argIndex >= argc)
{
throw OdmOrthoPhotoException("Argument '" + argument + "' expects 1 more input following it, but no more inputs were provided.");
}
outputFile_ = std::string(argv[argIndex]);
log_ << "Writing output to: " << outputFile_ << "\n";
}
else if(argument == "-outputCornerFile")
{
argIndex++;
if (argIndex >= argc)
{
throw OdmOrthoPhotoException("Argument '" + argument + "' expects 1 more input following it, but no more inputs were provided.");
}
outputCornerFile_ = std::string(argv[argIndex]);
log_ << "Writing corners to: " << outputCornerFile_ << "\n";
}
else
{
printHelp();
throw OdmOrthoPhotoException("Unrecognised argument '" + argument + "'");
}
}
log_ << "\n";
}
void OdmOrthoPhoto::printHelp()
{
log_.setIsPrintingInCout(true);
log_ << "OpenDroneMapOrthoPhoto.exe\n\n";
log_ << "Purpose\n";
log_ << "Create an orthograpical photo from an oriented textured mesh.\n\n";
log_ << "Usage:\n";
log_ << "The program requires a path to an input OBJ mesh file and a resolution, as pixels/m. All other input parameters are optional.\n\n";
log_ << "The following flags are available\n";
log_ << "Call the program with flag \"-help\", or without parameters to print this message, or check any generated log file.\n";
log_ << "Call the program with flag \"-verbose\", to print log messages in the standard output stream as well as in the log file.\n\n";
log_ << "Parameters are specified as: \"-<argument name> <argument>\", (without <>), and the following parameters are configureable:n";
log_ << "\"-inputFile <path>\" (mandatory)\n";
log_ << "\"Input obj file that must contain a textured mesh.\n\n";
log_ << "\"-inputGeoRefFile <path>\" (optional, if specified boundary points are assumed to be given as world coordinates. If not specified, the boundary points are assumed to be local coordinates)\n";
log_ << "\"Input geograpical reference system file that describes the world position of the model's origin.\n\n";
log_ << "\"-outputFile <path>\" (optional, default: ortho.jpg)\n";
log_ << "\"Target file in which the orthophoto is saved.\n\n";
log_ << "\"-outputCornerFile <path>\" (optional)\n";
log_ << "\"Target text file for boundary corner points, written as \"xmin ymin xmax ymax\".\n\n";
log_ << "\"-resolution <pixels/m>\" (mandatory)\n";
log_ << "\"The number of pixels used per meter.\n\n";
log_ << "\"-boundary <Point1x Point1y Point2x Point2y Point3x Point3y Point4x Point4y>\" (optional, if not specified the entire model will be rendered)\n";
log_ << "\"Describes the area which should be covered in the ortho photo. The area will be a bounding box containing all four points. The points should be given in the same georeference system as the model.\n\n";
log_ << "\"-boundaryMinMax <MinX MinY MaxX MaxY>\" (optional, if not specified the entire model will be rendered.)\n";
log_ << "\"Describes the area which should be covered in the ortho photo. The area will be a bounding box with corners at MinX, MinY and MaxX, MaxY. The points should be given in the same georeference system as the model.\n\n";
log_.setIsPrintingInCout(false);
}
void OdmOrthoPhoto::createOrthoPhoto()
{
if(inputFile_.empty())
{
throw OdmOrthoPhotoException("Failed to create ortho photo, no texture mesh given.");
}
if(boundaryDefined_)
{
if(inputGeoRefFile_.empty())
{
// Points are assumed to be given in as local points.
adjustBoundsForLocal();
}
else
{
// Points are assumed to be given in as world points.
adjustBoundsForGeoRef();
}
}
else if(!inputGeoRefFile_.empty())
{
// No boundary points specified, but georeference system file was given.
log_ << "Warning:\n";
log_ << "\tSpecified -inputGeoRefFile, but no boundary points. The georeference system will be ignored.\n";
}
log_ << "Reading mesh file...\n";
// The textureds mesh.
pcl::TextureMesh mesh;
pcl::io::loadOBJFile(inputFile_, mesh);
log_ << ".. mesh file read.\n\n";
// Does the model have more than one material?
multiMaterial_ = 1 < mesh.tex_materials.size();
if(multiMaterial_)
{
// Need to check relationship between texture coordinates and faces.
if(!isModelOk(mesh))
{
throw OdmOrthoPhotoException("Could not generate ortho photo: The given mesh has multiple textures, but the number of texture coordinates is NOT equal to 3 times the number of faces.");
}
}
if(!boundaryDefined_)
{
// Determine boundary from model.
adjustBoundsForEntireModel(mesh);
}
// The minimum and maximum boundary values.
float xMax, xMin, yMax, yMin;
xMin = std::min(std::min(boundaryPoint1_[0], boundaryPoint2_[0]), std::min(boundaryPoint3_[0], boundaryPoint4_[0]));
xMax = std::max(std::max(boundaryPoint1_[0], boundaryPoint2_[0]), std::max(boundaryPoint3_[0], boundaryPoint4_[0]));
yMin = std::min(std::min(boundaryPoint1_[1], boundaryPoint2_[1]), std::min(boundaryPoint3_[1], boundaryPoint4_[1]));
yMax = std::max(std::max(boundaryPoint1_[1], boundaryPoint2_[1]), std::max(boundaryPoint3_[1], boundaryPoint4_[1]));
log_ << "Ortho photo bounds x : " << xMin << " -> " << xMax << '\n';
log_ << "Ortho photo bounds y : " << yMin << " -> " << yMax << '\n';
// The size of the area.
float xDiff = xMax - xMin;
float yDiff = yMax - yMin;
log_ << "Ortho photo area : " << xDiff*yDiff << "m2\n";
// The resolution neccesary to fit the area with the given resolution.
int rowRes = static_cast<int>(std::ceil(resolution_*yDiff));
int colRes = static_cast<int>(std::ceil(resolution_*xDiff));
log_ << "Ortho photo resolution, width x height : " << colRes << "x" << rowRes << '\n';
// Check size of photo.
if(0 >= rowRes*colRes)
{
if(0 >= rowRes)
{
log_ << "Warning: ortho photo has zero area, height = " << rowRes << ". Forcing height = 1.\n";
rowRes = 1;
}
if(0 >= colRes)
{
log_ << "Warning: ortho photo has zero area, width = " << colRes << ". Forcing width = 1.\n";
colRes = 1;
}
log_ << "New ortho photo resolution, width x height : " << colRes << "x" << rowRes << '\n';
}
// Init ortho photo
photo_ = cv::Mat::zeros(rowRes, colRes, CV_8UC4) + cv::Scalar(255, 255, 255, 0);
depth_ = cv::Mat::zeros(rowRes, colRes, CV_32F) - std::numeric_limits<float>::infinity();
// Contains the vertices of the mesh.
pcl::PointCloud<pcl::PointXYZ>::Ptr meshCloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::fromPCLPointCloud2 (mesh.cloud, *meshCloud);
// Creates a transformation which aligns the area for the ortho photo.
Eigen::Transform<float, 3, Eigen::Affine> transform = getROITransform(xMin, -yMax);
log_ << "Translating and scaling mesh...\n";
// Move the mesh into position.
pcl::transformPointCloud(*meshCloud, *meshCloud, transform);
log_ << ".. mesh translated and scaled.\n\n";
// Flatten texture coordiantes.
std::vector<Eigen::Vector2f> uvs;
for(size_t t = 0; t < mesh.tex_coordinates.size(); ++t)
{
uvs.insert(uvs.end(), mesh.tex_coordinates[t].begin(), mesh.tex_coordinates[t].end());
}
// The current material texture
cv::Mat texture;
// Used to keep track of the global face index.
size_t faceOff = 0;
log_ << "Rendering the ortho photo...\n";
// Iterate over each part of the mesh (one per material).
for(size_t t = 0; t < mesh.tex_materials.size(); ++t)
{
// The material of the current submesh.
pcl::TexMaterial material = mesh.tex_materials[t];
texture = cv::imread(material.tex_file);
// Check for missing files.
if(texture.empty())
{
log_ << "Material texture could not be read:\n";
log_ << material.tex_file << '\n';
log_ << "Could not be read as image, does the file exist?\n";
continue; // Skip to next material.
}
// The faces of the current submesh.
std::vector<pcl::Vertices> faces = mesh.tex_polygons[t];
// Iterate over each face...
for(size_t faceIndex = 0; faceIndex < faces.size(); ++faceIndex)
{
// The current polygon.
pcl::Vertices polygon = faces[faceIndex];
// ... and draw it into the ortho photo.
drawTexturedTriangle(texture, polygon, meshCloud, uvs, faceIndex+faceOff);
}
faceOff += faces.size();
log_ << "Material " << t << " rendered.\n";
}
log_ << "...ortho photo rendered\n";
log_ << '\n';
log_ << "Writing ortho photo to " << outputFile_ << "\n";
cv::imwrite(outputFile_, photo_);
if (!outputCornerFile_.empty())
{
log_ << "Writing corner coordinates to " << outputCornerFile_ << "\n";
std::ofstream cornerStream(outputCornerFile_.c_str());
if (!cornerStream.is_open())
{
throw OdmOrthoPhotoException("Failed opening output corner file " + outputCornerFile_ + ".");
}
cornerStream.setf(std::ios::scientific, std::ios::floatfield);
cornerStream.precision(17);
cornerStream << xMin << " " << yMin << " " << xMax << " " << yMax;
cornerStream.close();
}
log_ << "Orthophoto generation done.\n";
}
void OdmOrthoPhoto::adjustBoundsForGeoRef()
{
log_ << "Adjusting bounds for world coordinates\n";
// A stream of the georef system.
std::ifstream geoRefStream(inputGeoRefFile_.c_str());
// The system name
std::string system;
// The east and north offsets
int eastOffset, northOffset;
// Parse file
std::getline(geoRefStream, system);
if(!(geoRefStream >> eastOffset))
{
throw OdmOrthoPhotoException("Could not extract geographical reference system from \n" + inputGeoRefFile_ + "\nCould not extract east offset.");
}
if(!(geoRefStream >> northOffset))
{
throw OdmOrthoPhotoException("Could not extract geographical reference system from \n" + inputGeoRefFile_ + "\nCould not extract north offset.");
}
log_ << "Georeference system:\n";
log_ << system << "\n";
log_ << "East offset: " << eastOffset << "\n";
log_ << "North offset: " << northOffset << "\n";
// Adjust boundary points.
boundaryPoint1_[0] = static_cast<float>(worldPoint1_.eastInteger_ - eastOffset) + worldPoint1_.eastFractional_;
boundaryPoint1_[1] = static_cast<float>(worldPoint1_.northInteger_ - northOffset) + worldPoint1_.northFractional_;
boundaryPoint2_[0] = static_cast<float>(worldPoint2_.eastInteger_ - eastOffset) + worldPoint2_.eastFractional_;
boundaryPoint2_[1] = static_cast<float>(worldPoint2_.northInteger_ - northOffset) + worldPoint2_.northFractional_;
boundaryPoint3_[0] = static_cast<float>(worldPoint3_.eastInteger_ - eastOffset) + worldPoint3_.eastFractional_;
boundaryPoint3_[1] = static_cast<float>(worldPoint3_.northInteger_ - northOffset) + worldPoint3_.northFractional_;
boundaryPoint4_[0] = static_cast<float>(worldPoint4_.eastInteger_ - eastOffset) + worldPoint4_.eastFractional_;
boundaryPoint4_[1] = static_cast<float>(worldPoint4_.northInteger_ - northOffset) + worldPoint4_.northFractional_;
log_ << "Local boundary points:\n";
log_ << "Point 1: " << boundaryPoint1_[0] << " " << boundaryPoint1_[1] << "\n";
log_ << "Point 2: " << boundaryPoint2_[0] << " " << boundaryPoint2_[1] << "\n";
log_ << "Point 3: " << boundaryPoint3_[0] << " " << boundaryPoint3_[1] << "\n";
log_ << "Point 4: " << boundaryPoint4_[0] << " " << boundaryPoint4_[1] << "\n";
}
void OdmOrthoPhoto::adjustBoundsForLocal()
{
log_ << "Adjusting bounds for local coordinates\n";
// Set boundary points from world points.
boundaryPoint1_[0] = static_cast<float>(worldPoint1_.eastInteger_ ) + worldPoint1_.eastFractional_;
boundaryPoint1_[1] = static_cast<float>(worldPoint1_.northInteger_) + worldPoint1_.northFractional_;
boundaryPoint2_[0] = static_cast<float>(worldPoint2_.eastInteger_ ) + worldPoint2_.eastFractional_;
boundaryPoint2_[1] = static_cast<float>(worldPoint2_.northInteger_) + worldPoint2_.northFractional_;
boundaryPoint3_[0] = static_cast<float>(worldPoint3_.eastInteger_ ) + worldPoint3_.eastFractional_;
boundaryPoint3_[1] = static_cast<float>(worldPoint3_.northInteger_) + worldPoint3_.northFractional_;
boundaryPoint4_[0] = static_cast<float>(worldPoint4_.eastInteger_ ) + worldPoint4_.eastFractional_;
boundaryPoint4_[1] = static_cast<float>(worldPoint4_.northInteger_) + worldPoint4_.northFractional_;
log_ << "Local boundary points:\n";
log_ << "Point 1: " << boundaryPoint1_[0] << " " << boundaryPoint1_[1] << "\n";
log_ << "Point 2: " << boundaryPoint2_[0] << " " << boundaryPoint2_[1] << "\n";
log_ << "Point 3: " << boundaryPoint3_[0] << " " << boundaryPoint3_[1] << "\n";
log_ << "Point 4: " << boundaryPoint4_[0] << " " << boundaryPoint4_[1] << "\n";
log_ << "\n";
}
void OdmOrthoPhoto::adjustBoundsForEntireModel(const pcl::TextureMesh &mesh)
{
log_ << "Set boundary to contain entire model.\n";
// The boundary of the model.
float xMin, xMax, yMin, yMax;
xMin = std::numeric_limits<float>::infinity();
xMax = -std::numeric_limits<float>::infinity();
yMin = std::numeric_limits<float>::infinity();
yMax = -std::numeric_limits<float>::infinity();
// Contains the vertices of the mesh.
pcl::PointCloud<pcl::PointXYZ>::Ptr meshCloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::fromPCLPointCloud2 (mesh.cloud, *meshCloud);
for(size_t t = 0; t < mesh.tex_materials.size(); ++t)
{
// The faces of the current submesh.
std::vector<pcl::Vertices> faces = mesh.tex_polygons[t];
// Iterate over each face...
for(size_t faceIndex = 0; faceIndex < faces.size(); ++faceIndex)
{
// The current polygon.
pcl::Vertices polygon = faces[faceIndex];
// The index to the vertices of the polygon.
size_t v1i = polygon.vertices[0];
size_t v2i = polygon.vertices[1];
size_t v3i = polygon.vertices[2];
// The polygon's points.
pcl::PointXYZ v1 = meshCloud->points[v1i];
pcl::PointXYZ v2 = meshCloud->points[v2i];
pcl::PointXYZ v3 = meshCloud->points[v3i];
xMin = std::min(std::min(xMin, v1.x), std::min(v2.x, v3.x));
xMax = std::max(std::max(xMax, v1.x), std::max(v2.x, v3.x));
yMin = std::min(std::min(yMin, v1.y), std::min(v2.y, v3.y));
yMax = std::max(std::max(yMax, v1.y), std::max(v2.y, v3.y));
}
}
// Create dummy boundary points.
boundaryPoint1_[0] = xMin; boundaryPoint1_[1] = yMin;
boundaryPoint2_[0] = xMin; boundaryPoint2_[1] = yMax;
boundaryPoint3_[0] = xMax; boundaryPoint3_[1] = yMax;
boundaryPoint4_[0] = xMax; boundaryPoint4_[1] = yMin;
log_ << "Local boundary points:\n";
log_ << "Point 1: " << boundaryPoint1_[0] << " " << boundaryPoint1_[1] << "\n";
log_ << "Point 2: " << boundaryPoint2_[0] << " " << boundaryPoint2_[1] << "\n";
log_ << "Point 3: " << boundaryPoint3_[0] << " " << boundaryPoint3_[1] << "\n";
log_ << "Point 4: " << boundaryPoint4_[0] << " " << boundaryPoint4_[1] << "\n";
log_ << "\n";
}
Eigen::Transform<float, 3, Eigen::Affine> OdmOrthoPhoto::getROITransform(float xMin, float yMin) const
{
// The tranform used to move the chosen area into the ortho photo.
Eigen::Transform<float, 3, Eigen::Affine> transform;
transform(0, 0) = resolution_; // x Scaling.
transform(1, 0) = 0.0f;
transform(2, 0) = 0.0f;
transform(3, 0) = 0.0f;
transform(0, 1) = 0.0f;
transform(1, 1) = -resolution_; // y Scaling, mirrored for easier rendering.
transform(2, 1) = 0.0f;
transform(3, 1) = 0.0f;
transform(0, 2) = 0.0f;
transform(1, 2) = 0.0f;
transform(2, 2) = 1.0f;
transform(3, 2) = 0.0f;
transform(0, 3) = -xMin*resolution_; // x Translation
transform(1, 3) = -yMin*resolution_; // y Translation
transform(2, 3) = 0.0f;
transform(3, 3) = 1.0f;
return transform;
}
void OdmOrthoPhoto::drawTexturedTriangle(const cv::Mat &texture, const pcl::Vertices &polygon, const pcl::PointCloud<pcl::PointXYZ>::Ptr &meshCloud, const std::vector<Eigen::Vector2f> &uvs, size_t faceIndex)
{
// The index to the vertices of the polygon.
size_t v1i = polygon.vertices[0];
size_t v2i = polygon.vertices[1];
size_t v3i = polygon.vertices[2];
// The polygon's points.
pcl::PointXYZ v1 = meshCloud->points[v1i];
pcl::PointXYZ v2 = meshCloud->points[v2i];
pcl::PointXYZ v3 = meshCloud->points[v3i];
if(isSliverPolygon(v1, v2, v3))
{
log_ << "Warning: Sliver polygon found at face index " << faceIndex << '\n';
return;
}
// The face data. Position v*{x,y,z}. Texture coordinate v*{u,v}. * is the vertex number in the polygon.
float v1x, v1y, v1z, v1u, v1v;
float v2x, v2y, v2z, v2u, v2v;
float v3x, v3y, v3z, v3u, v3v;
// Barycentric coordinates of the currently rendered point.
float l1, l2, l3;
// The size of the photo, as float.
float fRows, fCols;
fRows = static_cast<float>(texture.rows);
fCols = static_cast<float>(texture.cols);
// Get vertex position.
v1x = v1.x; v1y = v1.y; v1z = v1.z;
v2x = v2.x; v2y = v2.y; v2z = v2.z;
v3x = v3.x; v3y = v3.y; v3z = v3.z;
// Get texture coorinates. (Special cases for PCL when using multiple materials vs one material)
if(multiMaterial_)
{
v1u = uvs[3*faceIndex][0]; v1v = uvs[3*faceIndex][1];
v2u = uvs[3*faceIndex+1][0]; v2v = uvs[3*faceIndex+1][1];
v3u = uvs[3*faceIndex+2][0]; v3v = uvs[3*faceIndex+2][1];
}
else
{
v1u = uvs[v1i][0]; v1v = uvs[v1i][1];
v2u = uvs[v2i][0]; v2v = uvs[v2i][1];
v3u = uvs[v3i][0]; v3v = uvs[v3i][1];
}
// Check bounding box overlap.
int xMin = static_cast<int>(std::min(std::min(v1x, v2x), v3x));
if(xMin > photo_.cols)
{
return; // Completly outside to the right.
}
int xMax = static_cast<int>(std::max(std::max(v1x, v2x), v3x));
if(xMax < 0)
{
return; // Completly outside to the left.
}
int yMin = static_cast<int>(std::min(std::min(v1y, v2y), v3y));
if(yMin > photo_.rows)
{
return; // Completly outside to the top.
}
int yMax = static_cast<int>(std::max(std::max(v1y, v2y), v3y));
if(yMax < 0)
{
return; // Completly outside to the bottom.
}
// Top point row and column positions
float topR, topC;
// Middle point row and column positions
float midR, midC;
// Bottom point row and column positions
float botR, botC;
// Find top, middle and bottom points.
if(v1y < v2y)
{
if(v1y < v3y)
{
if(v2y < v3y)
{
// 1 -> 2 -> 3
topR = v1y; topC = v1x;
midR = v2y; midC = v2x;
botR = v3y; botC = v3x;
}
else
{
// 1 -> 3 -> 2
topR = v1y; topC = v1x;
midR = v3y; midC = v3x;
botR = v2y; botC = v2x;
}
}
else
{
// 3 -> 1 -> 2
topR = v3y; topC = v3x;
midR = v1y; midC = v1x;
botR = v2y; botC = v2x;
}
}
else // v2y <= v1y
{
if(v2y < v3y)
{
if(v1y < v3y)
{
// 2 -> 1 -> 3
topR = v2y; topC = v2x;
midR = v1y; midC = v1x;
botR = v3y; botC = v3x;
}
else
{
// 2 -> 3 -> 1
topR = v2y; topC = v2x;
midR = v3y; midC = v3x;
botR = v1y; botC = v1x;
}
}
else
{
// 3 -> 2 -> 1
topR = v3y; topC = v3x;
midR = v2y; midC = v2x;
botR = v1y; botC = v1x;
}
}
// General appreviations:
// ---------------------
// tm : Top(to)Middle.
// mb : Middle(to)Bottom.
// tb : Top(to)Bottom.
// c : column.
// r : row.
// dr : DeltaRow, step value per row.
// The step along column for every step along r. Top to middle.
float ctmdr;
// The step along column for every step along r. Top to bottom.
float ctbdr;
// The step along column for every step along r. Middle to bottom.
float cmbdr;
ctbdr = (botC-topC)/(botR-topR);
// The current column position, from top to middle.
float ctm = topC;
// The current column position, from top to bottom.
float ctb = topC;
// Check for vertical line between middle and top.
if(FLT_EPSILON < midR-topR)
{
ctmdr = (midC-topC)/(midR-topR);
// The first pixel row for the bottom part of the triangle.
int rqStart = std::max(static_cast<int>(std::floor(topR+0.5f)), 0);
// The last pixel row for the top part of the triangle.
int rqEnd = std::min(static_cast<int>(std::floor(midR+0.5f)), photo_.rows);
// Travers along row from top to middle.
for(int rq = rqStart; rq < rqEnd; ++rq)
{
// Set the current column positions.
ctm = topC + ctmdr*(static_cast<float>(rq)+0.5f-topR);
ctb = topC + ctbdr*(static_cast<float>(rq)+0.5f-topR);
// The first pixel column for the current row.
int cqStart = std::max(static_cast<int>(std::floor(0.5f+std::min(ctm, ctb))), 0);
// The last pixel column for the current row.
int cqEnd = std::min(static_cast<int>(std::floor(0.5f+std::max(ctm, ctb))), photo_.cols);
for(int cq = cqStart; cq < cqEnd; ++cq)
{
// Get barycentric coordinates for the current point.
getBarycentricCoordiantes(v1, v2, v3, static_cast<float>(cq)+0.5f, static_cast<float>(rq)+0.5f, l1, l2, l3);
if(0.f > l1 || 0.f > l2 || 0.f > l3)
{
//continue;
}
// The z value for the point.
float z = v1z*l1+v2z*l2+v3z*l3;
// Check depth
float depthValue = depth_.at<float>(rq, cq);
if(z < depthValue)
{
// Current is behind another, don't draw.
continue;
}
// The uv values of the point.
float u, v;
u = v1u*l1+v2u*l2+v3u*l3;
v = v1v*l1+v2v*l2+v3v*l3;
renderPixel(rq, cq, u*fCols, (1.0f-v)*fRows, texture);
// Update depth buffer.
depth_.at<float>(rq, cq) = z;
}
}
}
if(FLT_EPSILON < botR-midR)
{
cmbdr = (botC-midC)/(botR-midR);
// The current column position, from middle to bottom.
float cmb = midC;
// The first pixel row for the bottom part of the triangle.
int rqStart = std::max(static_cast<int>(std::floor(midR+0.5f)), 0);
// The last pixel row for the bottom part of the triangle.
int rqEnd = std::min(static_cast<int>(std::floor(botR+0.5f)), photo_.rows);
// Travers along row from middle to bottom.
for(int rq = rqStart; rq < rqEnd; ++rq)
{
// Set the current column positions.
ctb = topC + ctbdr*(static_cast<float>(rq)+0.5f-topR);
cmb = midC + cmbdr*(static_cast<float>(rq)+0.5f-midR);
// The first pixel column for the current row.
int cqStart = std::max(static_cast<int>(std::floor(0.5f+std::min(cmb, ctb))), 0);
// The last pixel column for the current row.
int cqEnd = std::min(static_cast<int>(std::floor(0.5f+std::max(cmb, ctb))), photo_.cols);
for(int cq = cqStart; cq < cqEnd; ++cq)
{
// Get barycentric coordinates for the current point.
getBarycentricCoordiantes(v1, v2, v3, static_cast<float>(cq)+0.5f, static_cast<float>(rq)+0.5f, l1, l2, l3);
if(0.f > l1 || 0.f > l2 || 0.f > l3)
{
//continue;
}
// The z value for the point.
float z = v1z*l1+v2z*l2+v3z*l3;
// Check depth
float depthValue = depth_.at<float>(rq, cq);
if(z < depthValue)
{
// Current is behind another, don't draw.
continue;
}
// The uv values of the point.
float u, v;
u = v1u*l1+v2u*l2+v3u*l3;
v = v1v*l1+v2v*l2+v3v*l3;
renderPixel(rq, cq, u*fCols, (1.0f-v)*fRows, texture);
// Update depth buffer.
depth_.at<float>(rq, cq) = z;
}
}
}
}
void OdmOrthoPhoto::renderPixel(int row, int col, float s, float t, const cv::Mat &texture)
{
// The colors of the texture pixels. tl : top left, tr : top right, bl : bottom left, br : bottom right.
cv::Vec3b tl, tr, bl, br;
// The offset of the texture coordinate from its pixel positions.
float leftF, topF;
// The position of the top left pixel.
int left, top;
// The distance to the left and right pixel from the texture coordinate.
float dl, dt;
// The distance to the top and bottom pixel from the texture coordinate.
float dr, db;
dl = modff(s, &leftF);
dr = 1.0f - dl;
dt = modff(t, &topF);
db = 1.0f - dt;
left = static_cast<int>(leftF);
top = static_cast<int>(topF);
tl = texture.at<cv::Vec3b>(top, left);
tr = texture.at<cv::Vec3b>(top, left+1);
bl = texture.at<cv::Vec3b>(top+1, left);
br = texture.at<cv::Vec3b>(top+1, left+1);
// The interpolated color values.
float r = 0.0f, g = 0.0f, b = 0.0f;
// Red
r += static_cast<float>(tl[2]) * dr * db;
r += static_cast<float>(tr[2]) * dl * db;
r += static_cast<float>(bl[2]) * dr * dt;
r += static_cast<float>(br[2]) * dl * dt;
// Green
g += static_cast<float>(tl[1]) * dr * db;
g += static_cast<float>(tr[1]) * dl * db;
g += static_cast<float>(bl[1]) * dr * dt;
g += static_cast<float>(br[1]) * dl * dt;
// Blue
b += static_cast<float>(tl[0]) * dr * db;
b += static_cast<float>(tr[0]) * dl * db;
b += static_cast<float>(bl[0]) * dr * dt;
b += static_cast<float>(br[0]) * dl * dt;
photo_.at<cv::Vec4b>(row,col) = cv::Vec4b(static_cast<unsigned char>(b), static_cast<unsigned char>(g), static_cast<unsigned char>(r), 255);
}
void OdmOrthoPhoto::getBarycentricCoordiantes(pcl::PointXYZ v1, pcl::PointXYZ v2, pcl::PointXYZ v3, float x, float y, float &l1, float &l2, float &l3) const
{
// Diff along y.
float y2y3 = v2.y-v3.y;
float y1y3 = v1.y-v3.y;
float y3y1 = v3.y-v1.y;
float yy3 = y -v3.y;
// Diff along x.
float x3x2 = v3.x-v2.x;
float x1x3 = v1.x-v3.x;
float xx3 = x -v3.x;
// Normalization factor.
float norm = (y2y3*x1x3 + x3x2*y1y3);
l1 = (y2y3*(xx3) + x3x2*(yy3)) / norm;
l2 = (y3y1*(xx3) + x1x3*(yy3)) / norm;
l3 = 1 - l1 - l2;
}
bool OdmOrthoPhoto::isSliverPolygon(pcl::PointXYZ v1, pcl::PointXYZ v2, pcl::PointXYZ v3) const
{
// Calculations are made using doubles, to minize rounding errors.
Eigen::Vector3d a = Eigen::Vector3d(static_cast<double>(v1.x), static_cast<double>(v1.y), static_cast<double>(v1.z));
Eigen::Vector3d b = Eigen::Vector3d(static_cast<double>(v2.x), static_cast<double>(v2.y), static_cast<double>(v2.z));
Eigen::Vector3d c = Eigen::Vector3d(static_cast<double>(v3.x), static_cast<double>(v3.y), static_cast<double>(v3.z));
Eigen::Vector3d dummyVec = (a-b).cross(c-b);
// Area smaller than, or equal to, floating-point epsilon.
return std::numeric_limits<float>::epsilon() >= static_cast<float>(std::sqrt(dummyVec.dot(dummyVec))/2.0);
}
bool OdmOrthoPhoto::isModelOk(const pcl::TextureMesh &mesh)
{
// The number of texture coordinates in the model.
size_t nTextureCoordinates = 0;
// The number of faces in the model.
size_t nFaces = 0;
for(size_t t = 0; t < mesh.tex_coordinates.size(); ++t)
{
nTextureCoordinates += mesh.tex_coordinates[t].size();
}
for(size_t t = 0; t < mesh.tex_polygons.size(); ++t)
{
nFaces += mesh.tex_polygons[t].size();
}
log_ << "Number of faces in the model " << nFaces << '\n';
return 3*nFaces == nTextureCoordinates;
}One of many scripts required to run OpenDroneMap on Linux via Command Line. See more at GitHub.
I use Pix4D
Other options include
- OpenDroneMapper
- Agisoft
- Drone Deploy
Accuracy
Error
Relative Accuracy
(need ground control points)
Absolute Accuracy
It is the accuracy that is defined by the difference between the location of features on a map / reconstructed model / orthomosaic and their true position on the Earth.
UAVs and Maps
By Britta Ricker
UAVs and Maps
Utilizing low-cost unmanned vehicle (UAV) to build orthophotos and Digital Surface Models Speaker: Britta Ricker, PhD When: Weds. Dec. 16, 2015 Noon – 1pm Where: USGS Water Science Center Office – Tacoma Columbia Conference room 934 Broadway, Suite 300 Tacoma, WA 98402 In this presentation, I will briefly contextualize this evolution by presenting how photogrammetry is reaching a confluence with structure for motion (SfM) software and why this is important. I will introduce methods of aerial imagery collection through the use of a low-cost and popular UAV systems. I will then focus on how to process the imagery to generate orthophotos and digital surface models (DSM) through the use of SfM software. I will conclude by presenting additional considerations including legal regulations, good flying practice, accuracy and precision and future research.




