


Chris Liu
Math gradudate student at Colorado State University
Chris Liu
QE2 Talk
Spring 2024
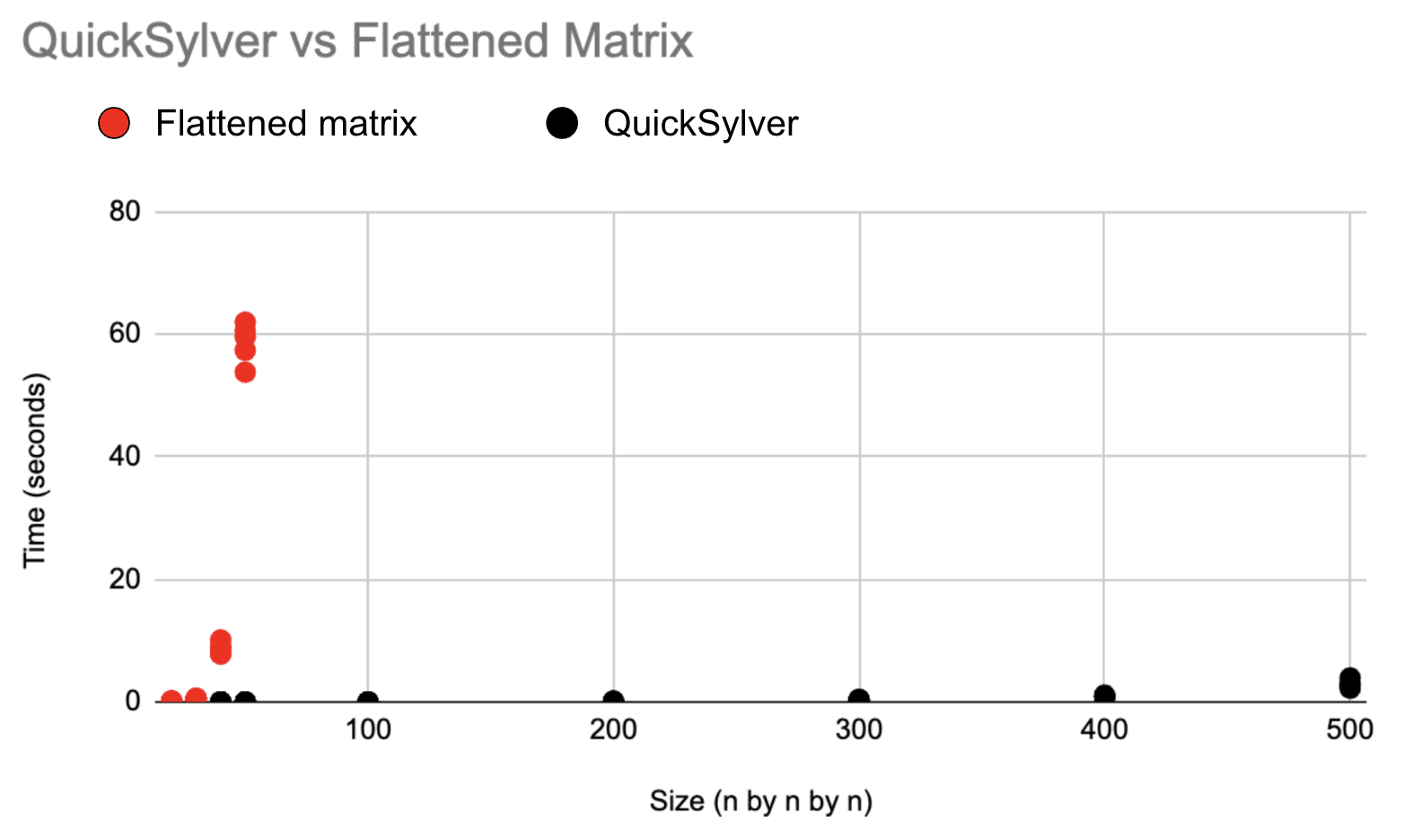
Fast solutions to Simultaneous Sylvester Systems
Given
Find
Such that
Module endomorphisms
$$\operatorname{End}({}_AM) = \{X \mid (\forall i)XA_i = A_iX\}$$
Adjoint Algebra of a bilinear map
$$\operatorname{Adj}(*) = \{(X,Y) \mid (\forall u,v)Xu*v = u*Yv\}$$
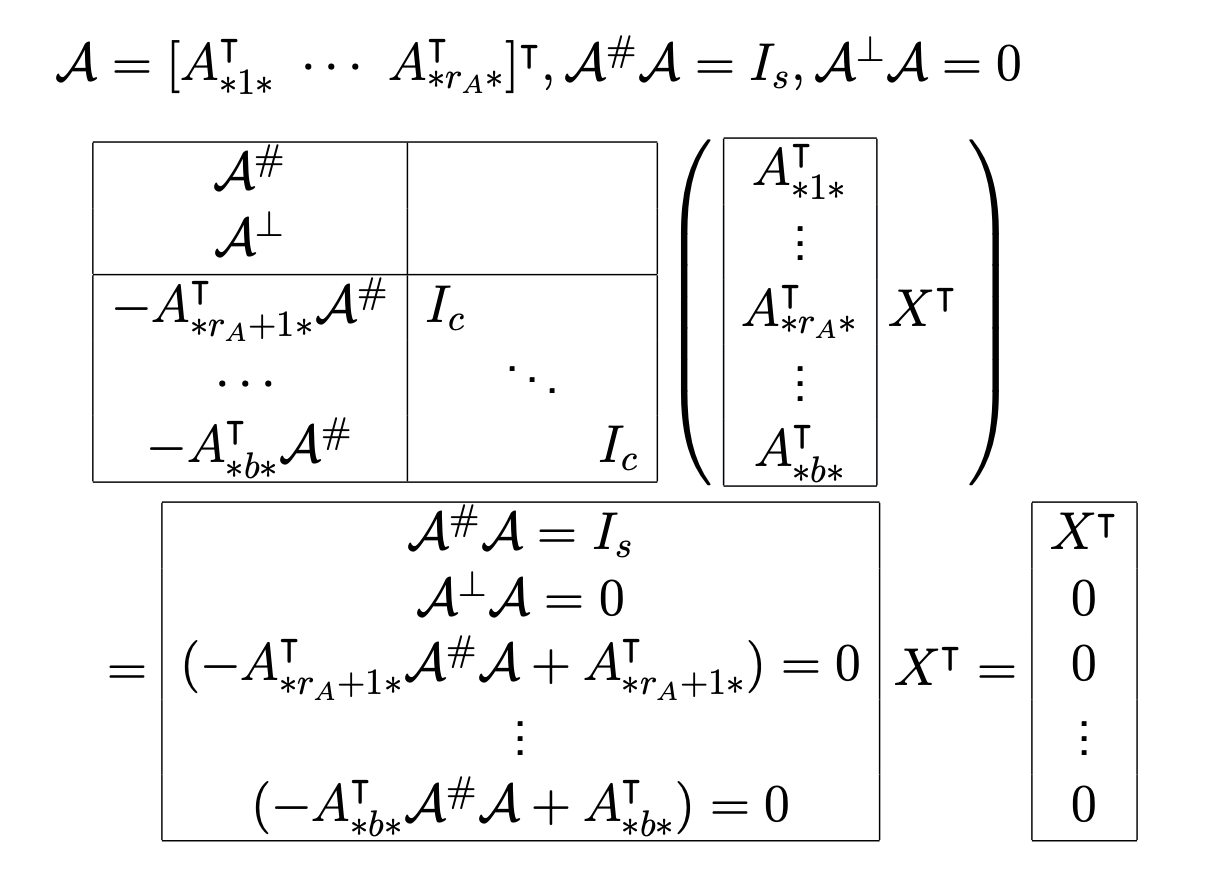
Simultaneous Roth’s removal rule
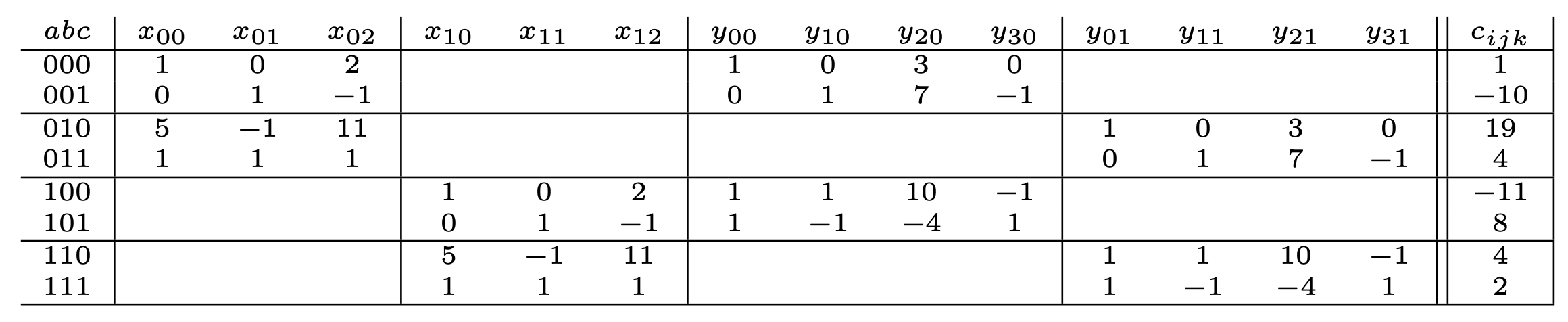
Interwoven striding in augmented matrix
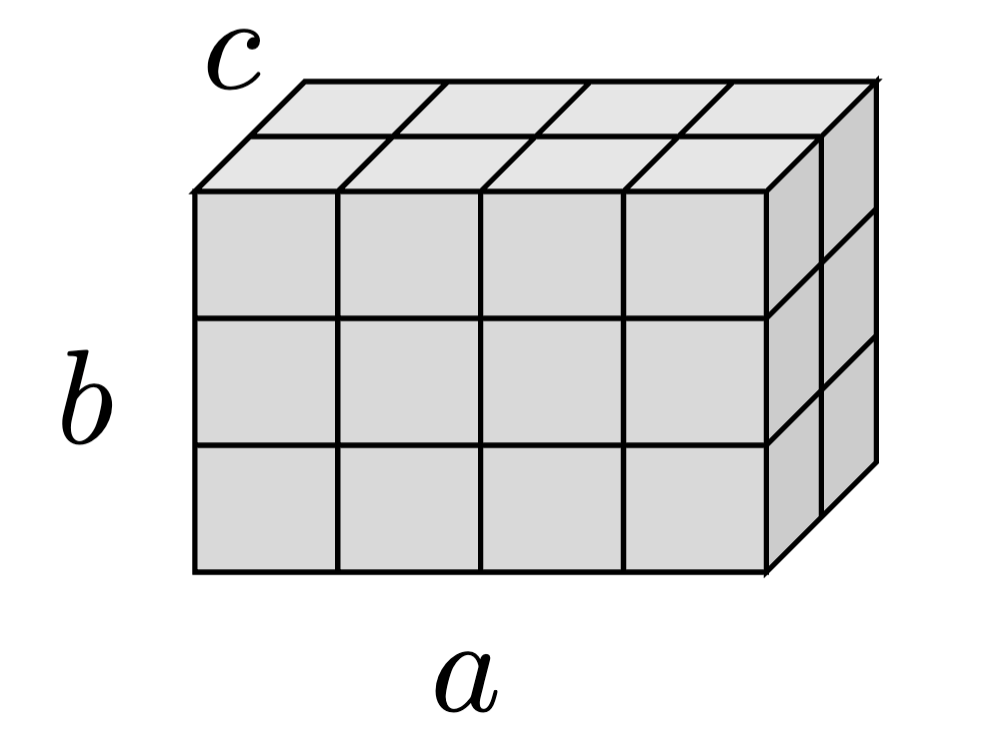
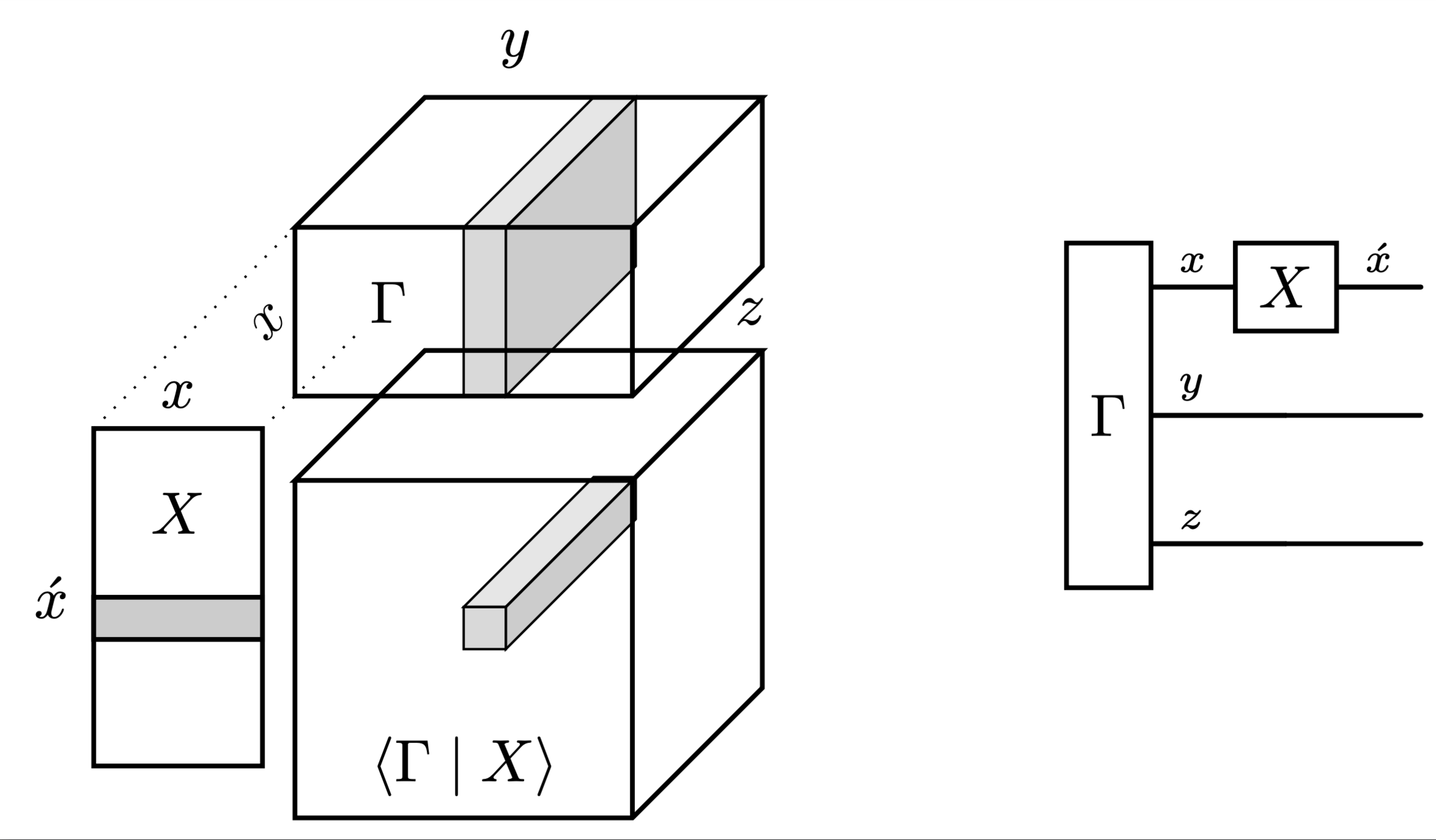
A tensor space has the data of
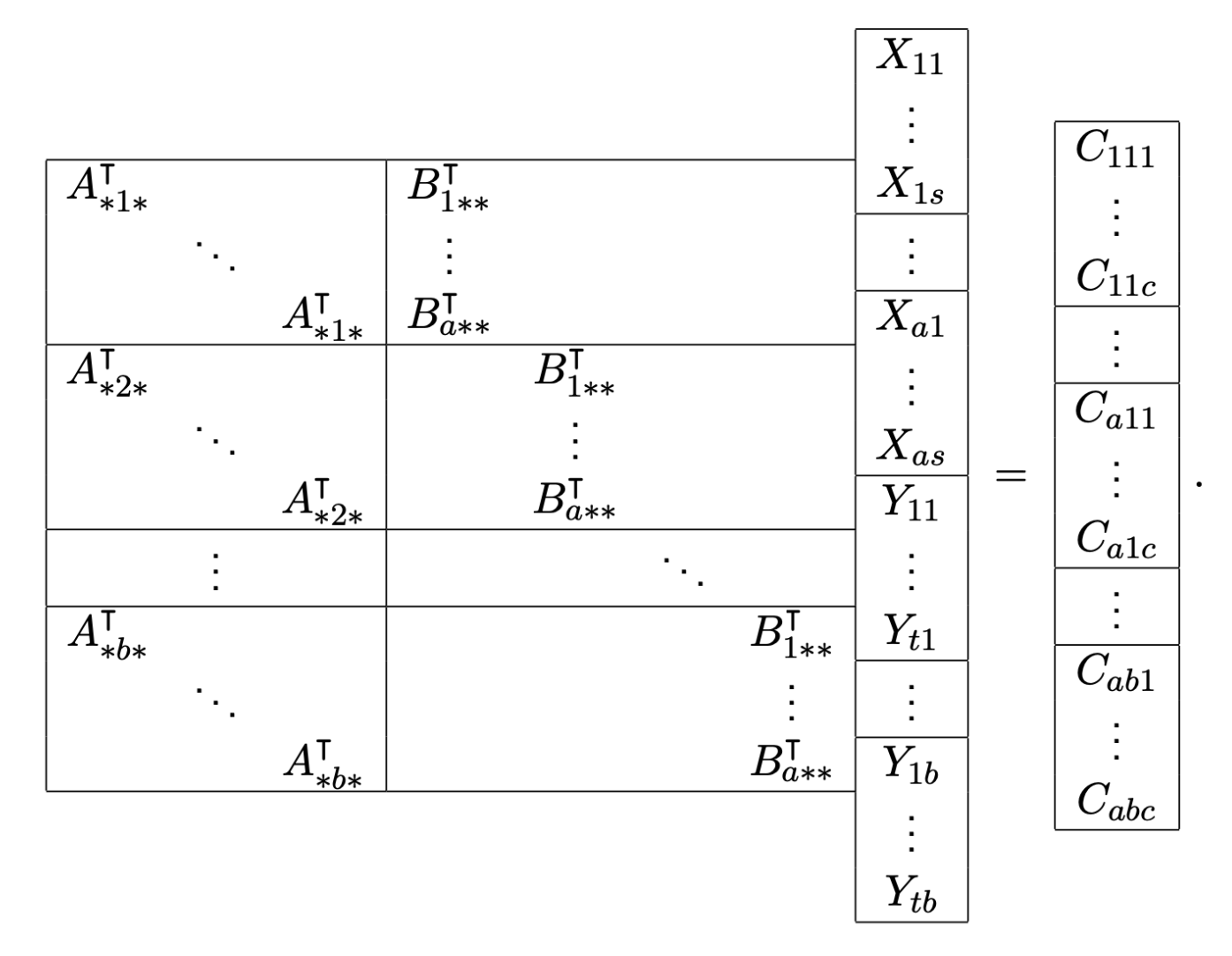
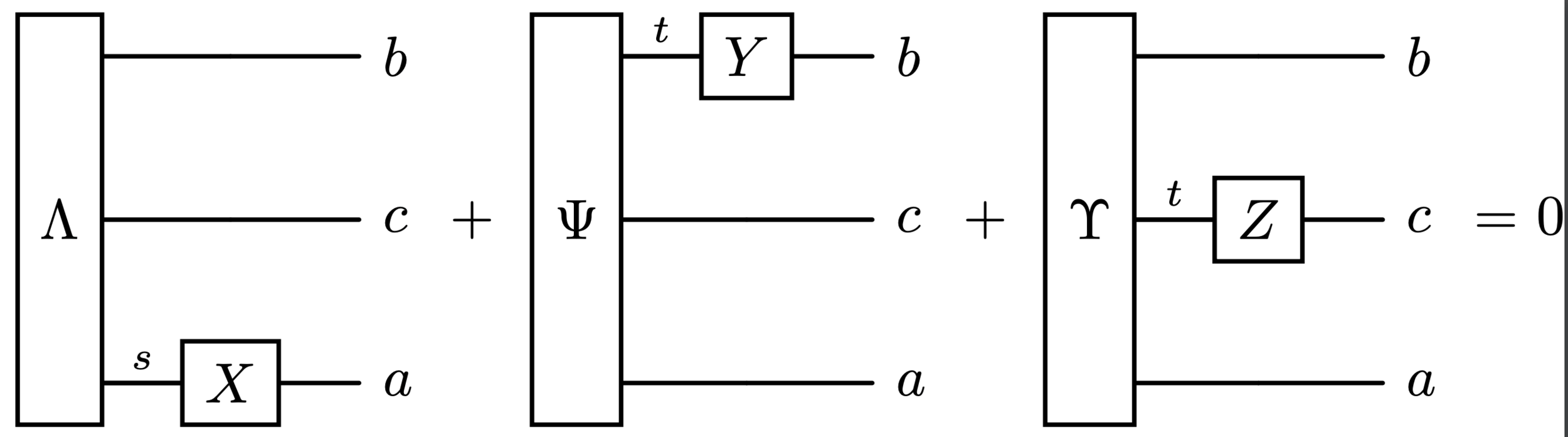
Simultaneous Sylvester System
Given
Find
Such that
Given
Find
Given
Find
Lemma: Size of minimum generating sets is well-defined
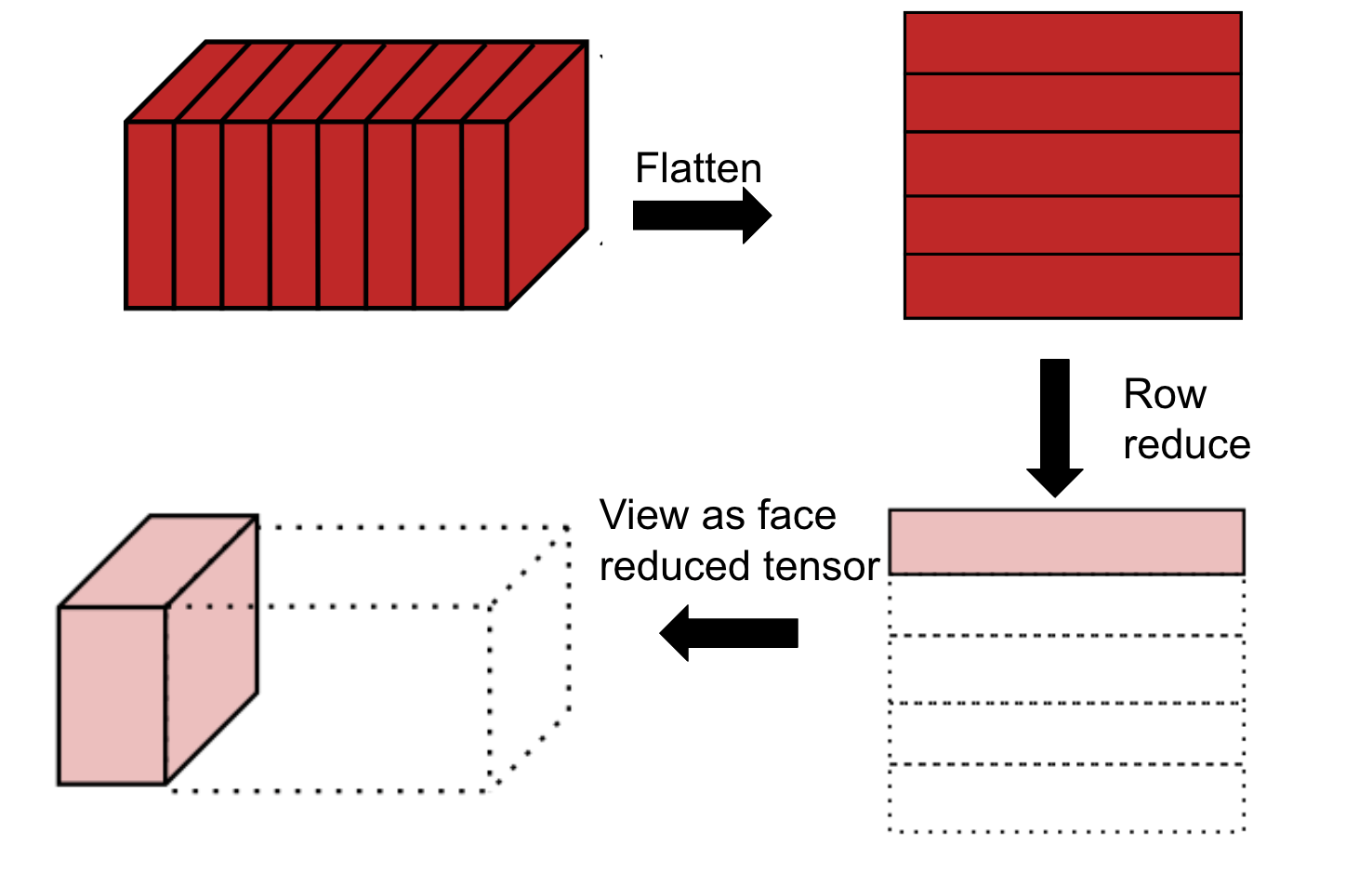
Analogy: row rank
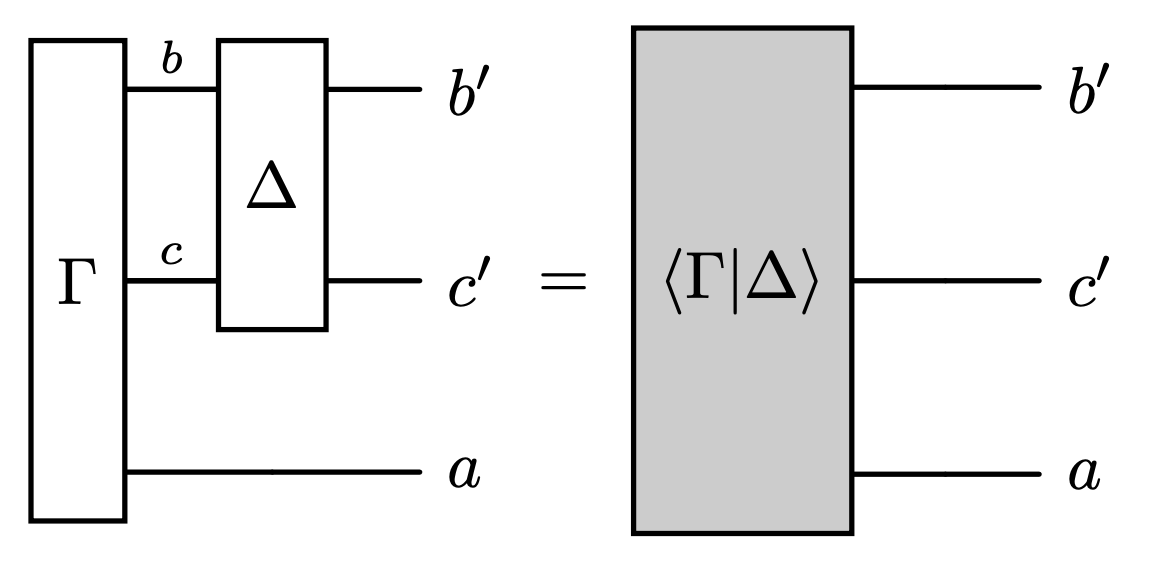
Shaded means face reduced
Challenge: face reducing tensors overlap
E in the way of F
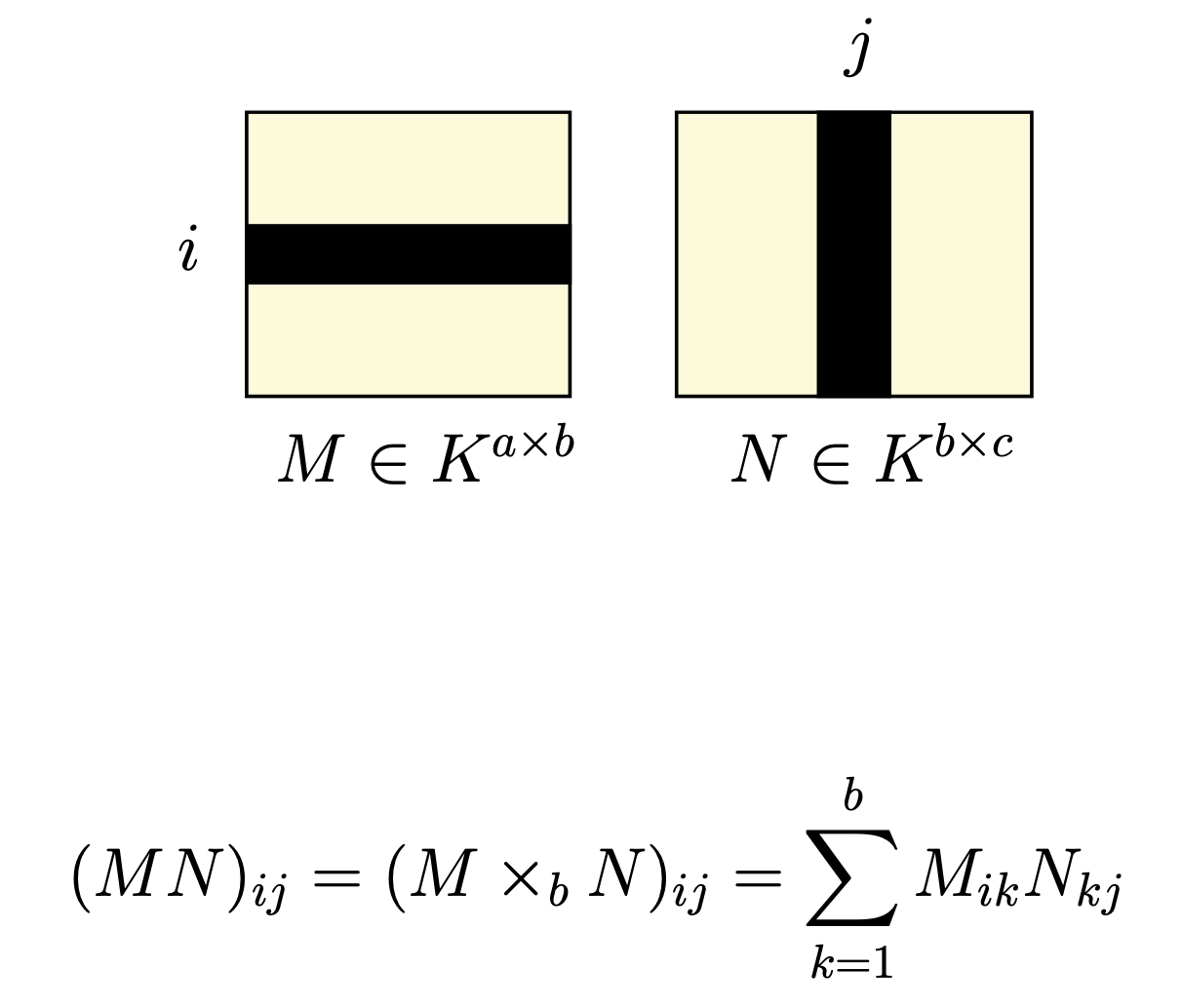
Matricies
Tensors
size of \(e_+\) bound by minimum generating set size
size of \(e\) is rank of M
E in the way
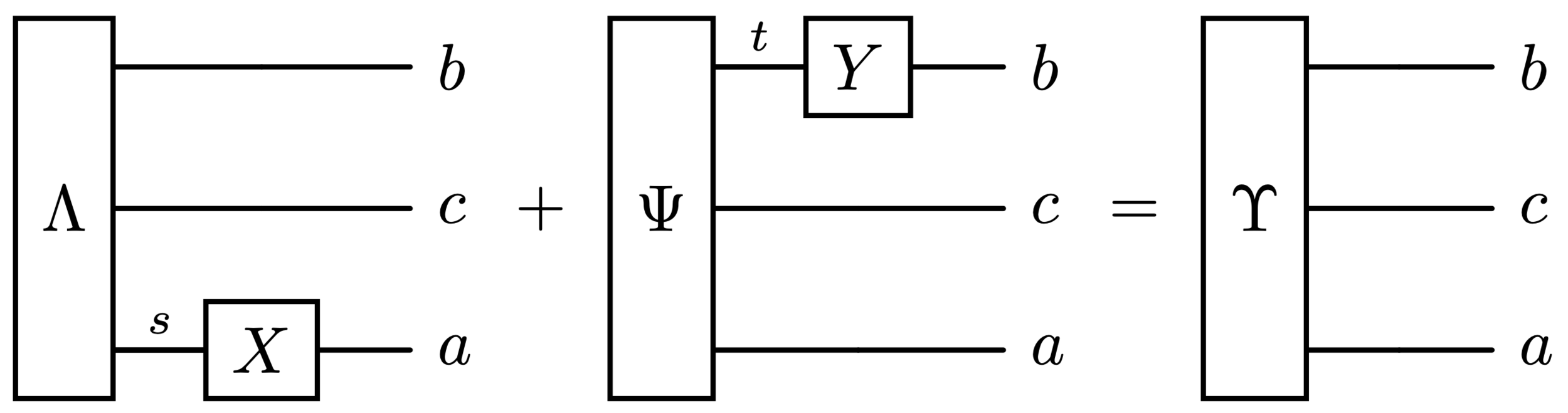
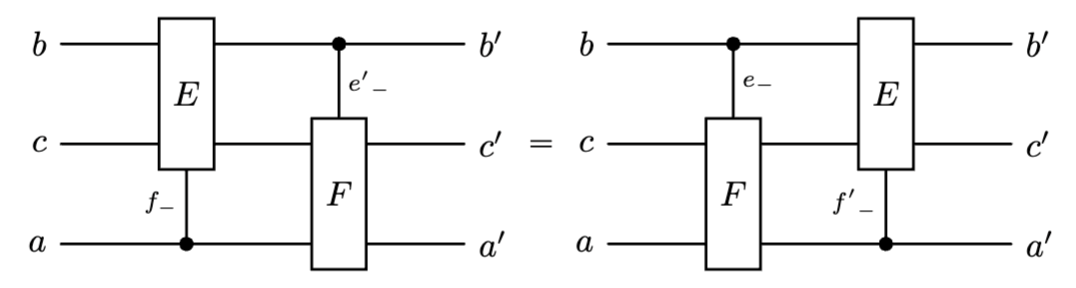
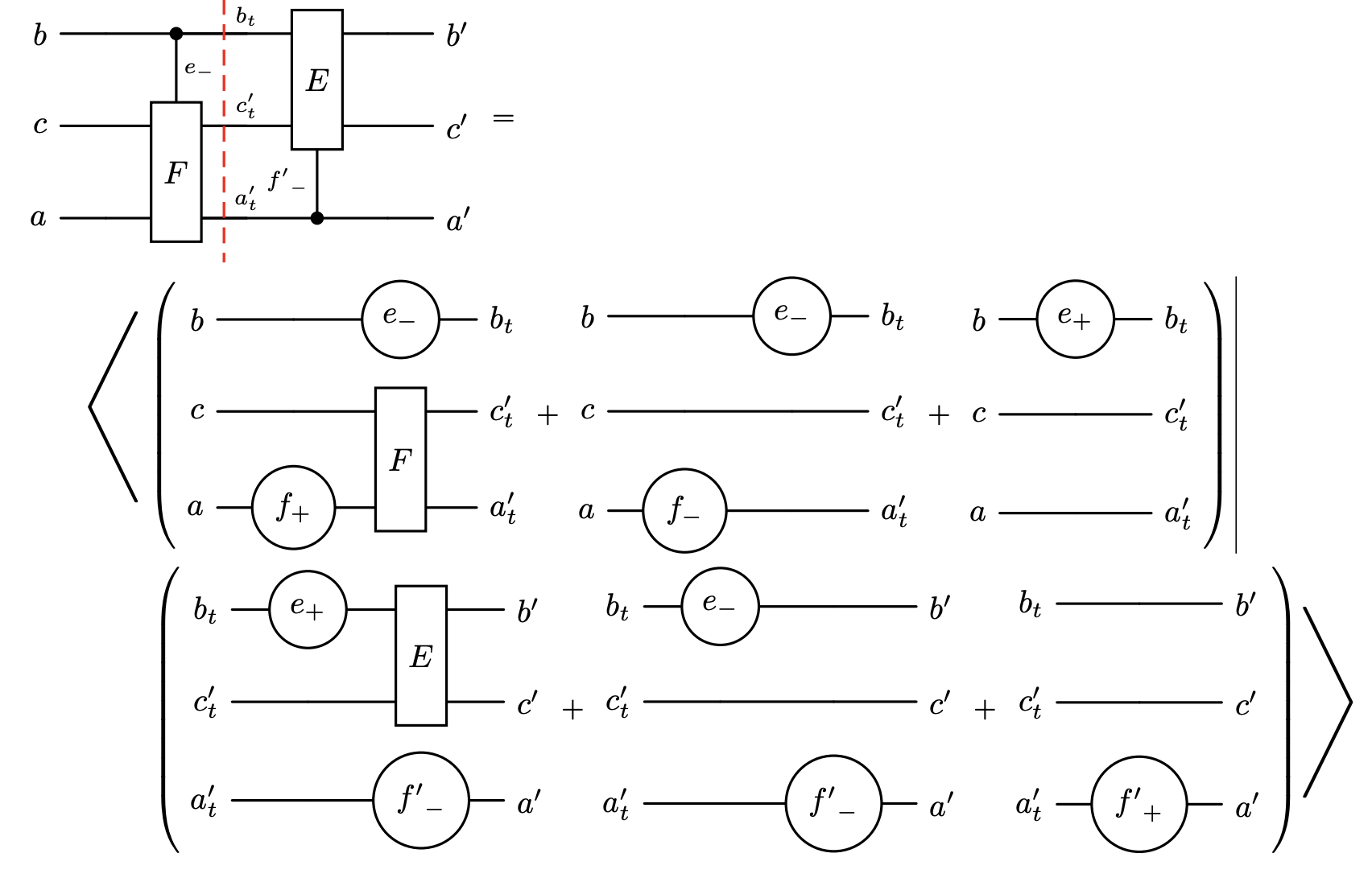
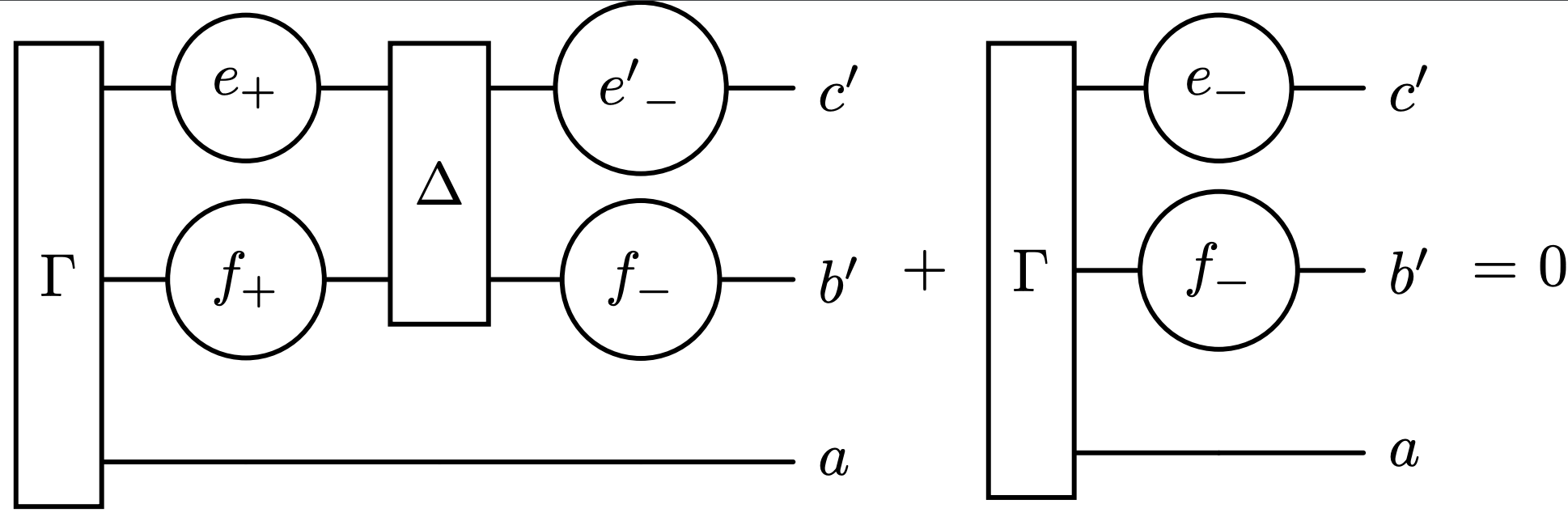
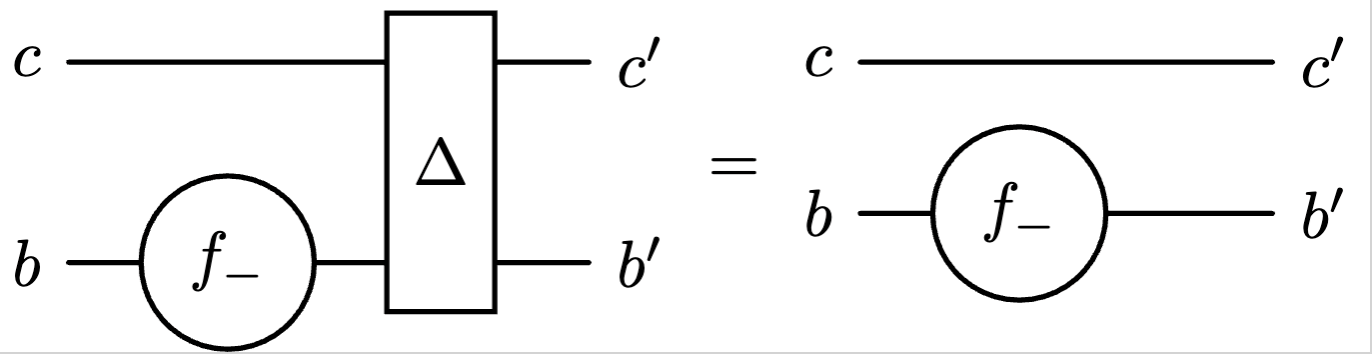
Craft face reducing tensors so they commute
Controlled tensors
Orthogonal Idempotents
Because both tensors equals to
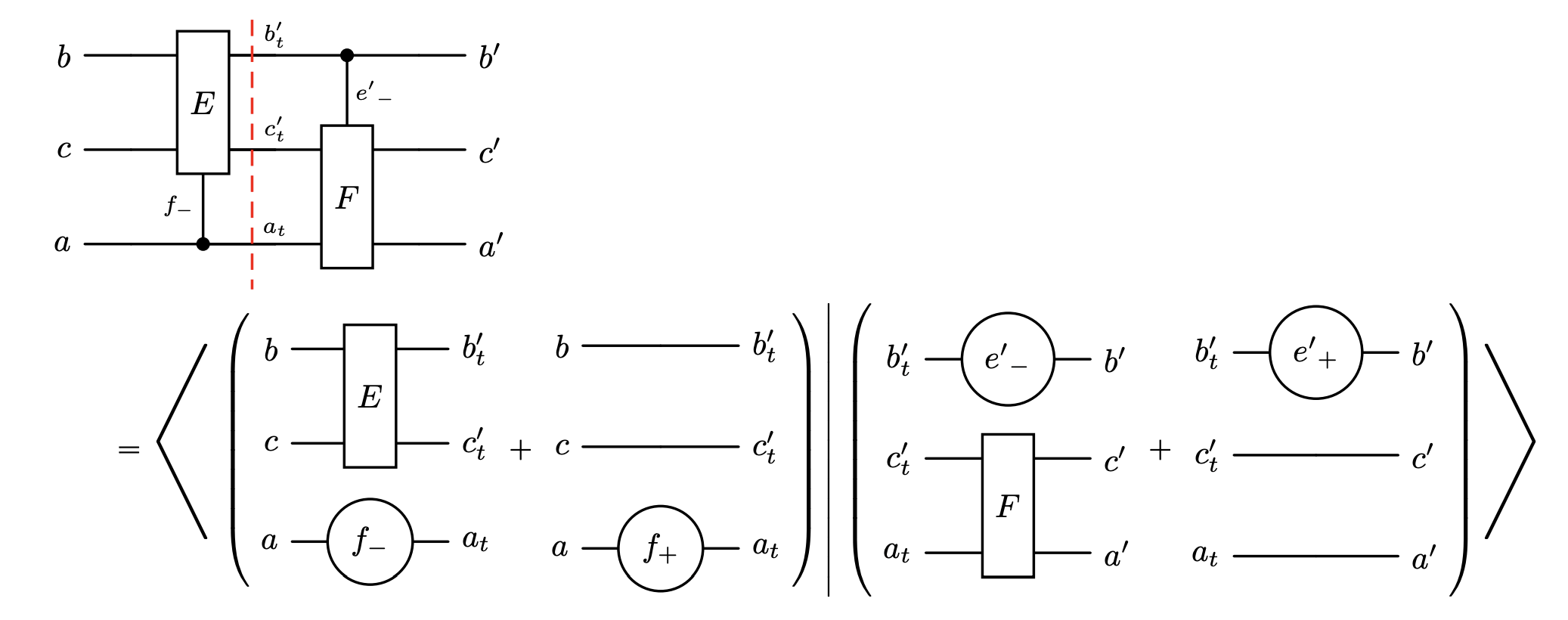
Proof idea
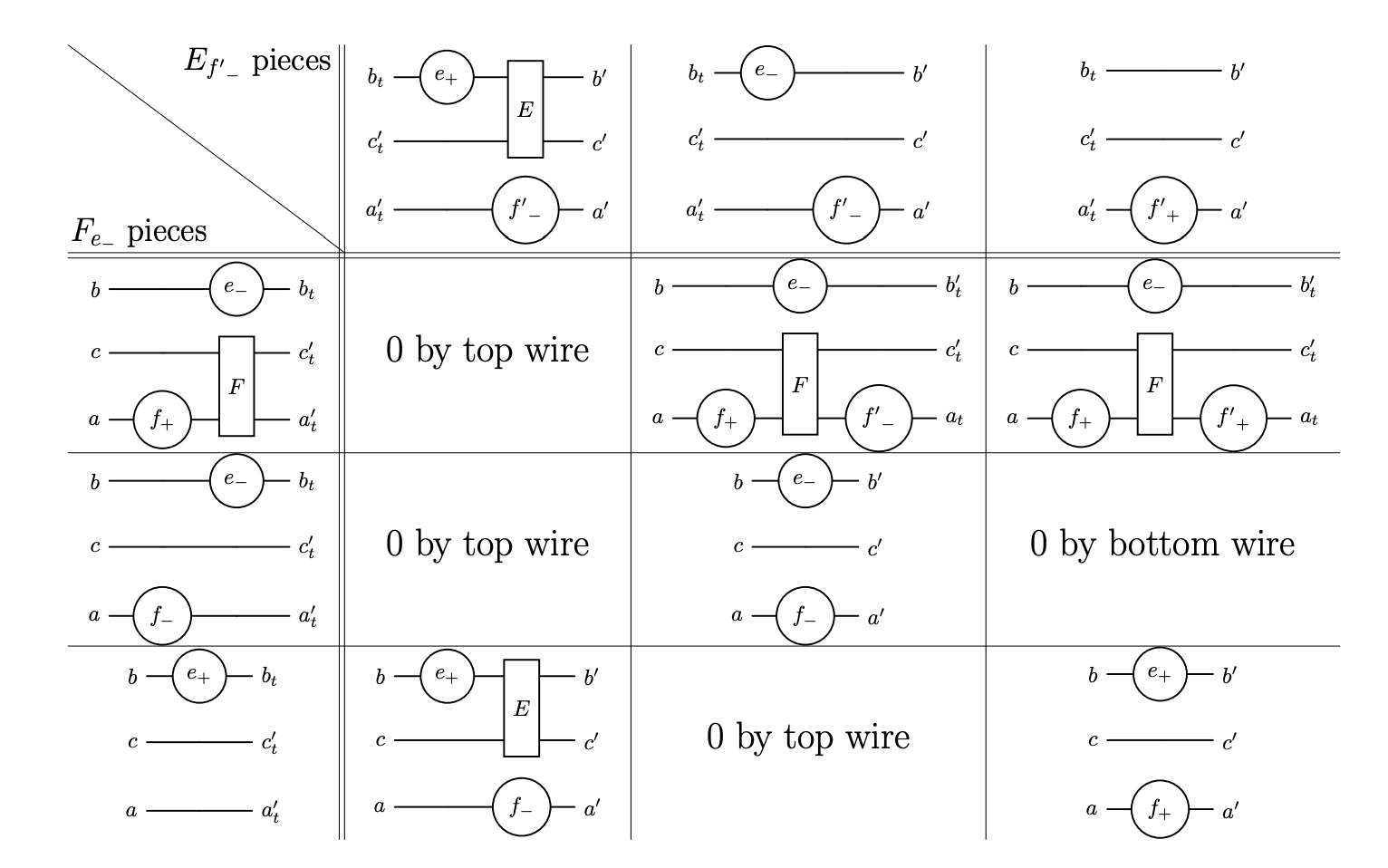
Proof idea: expand out both definitions
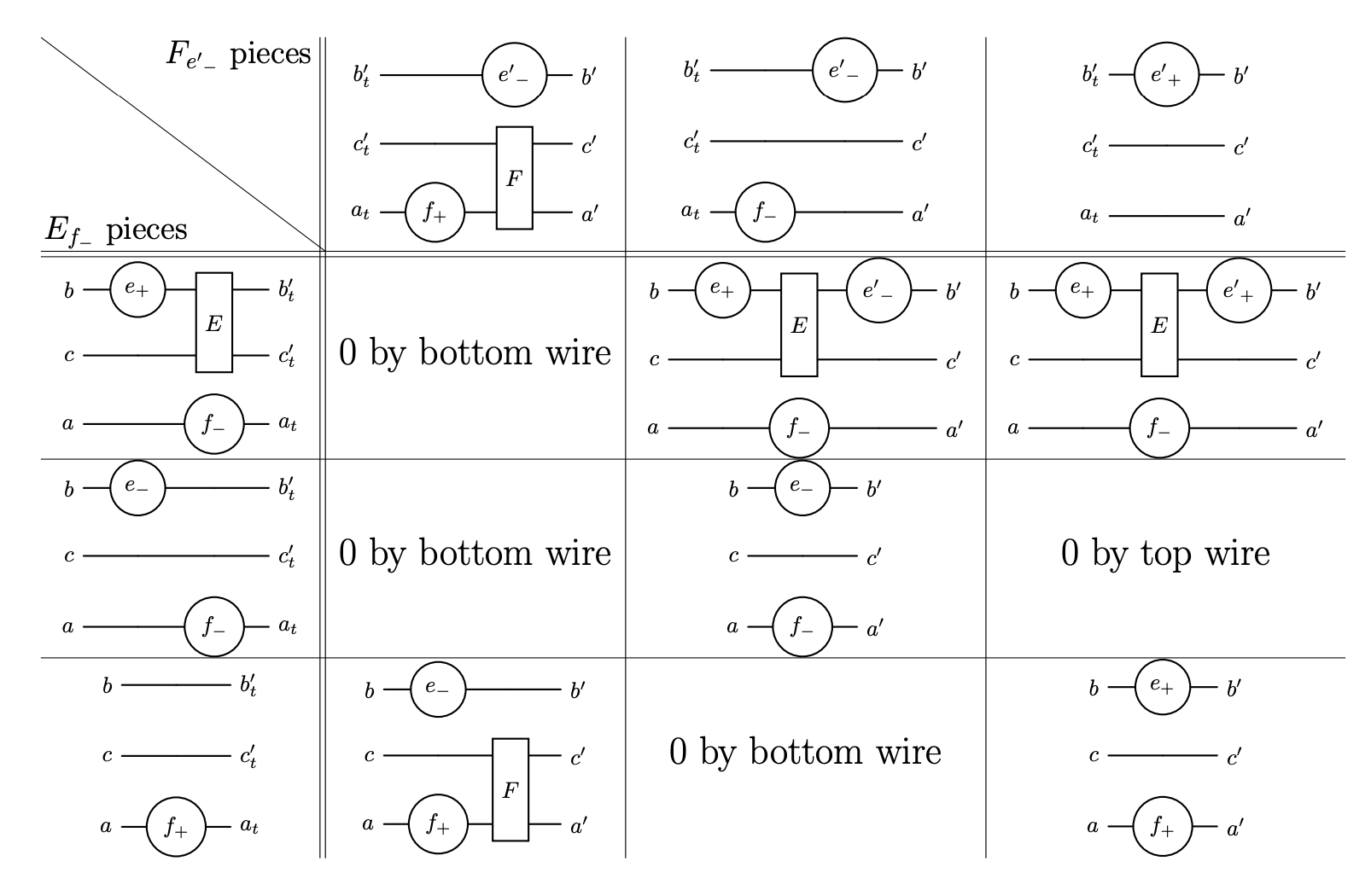
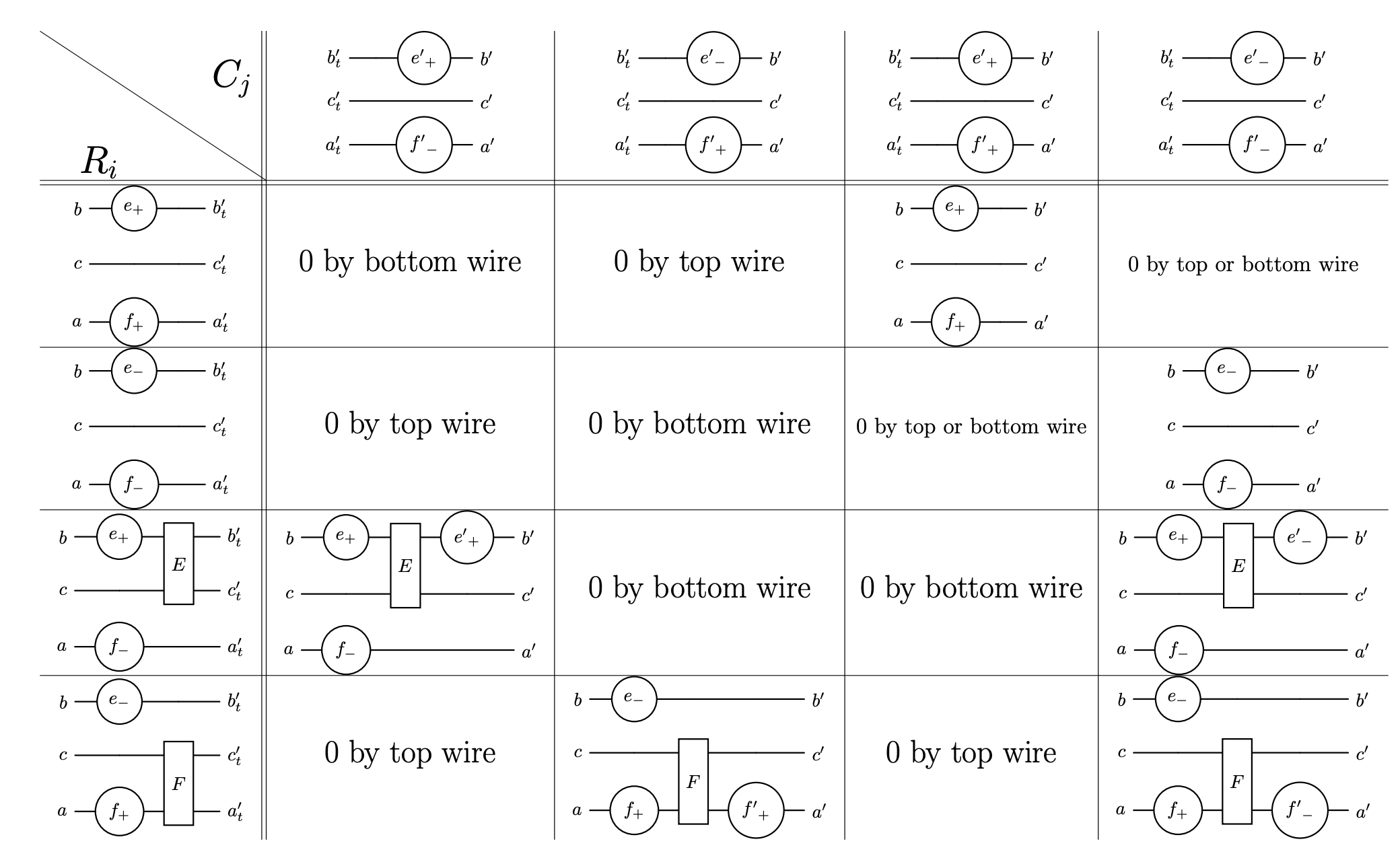
Proof idea continued
Proof idea continued
Proof idea continued
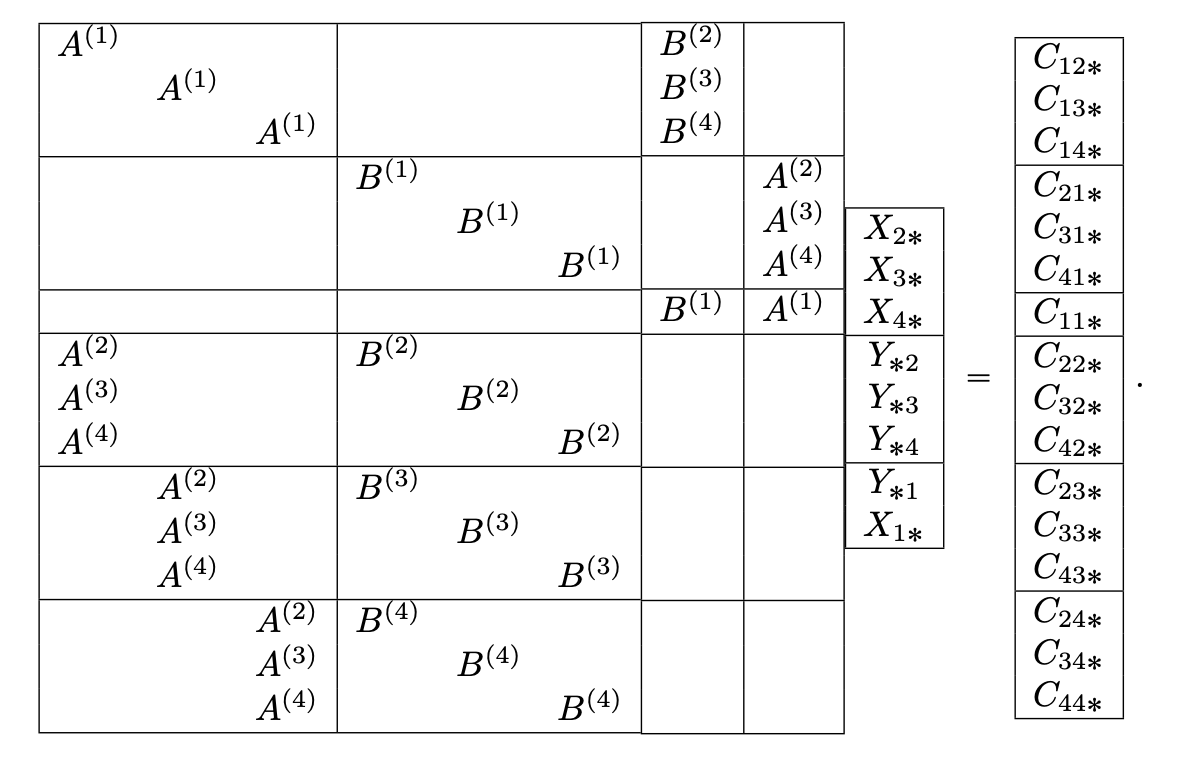
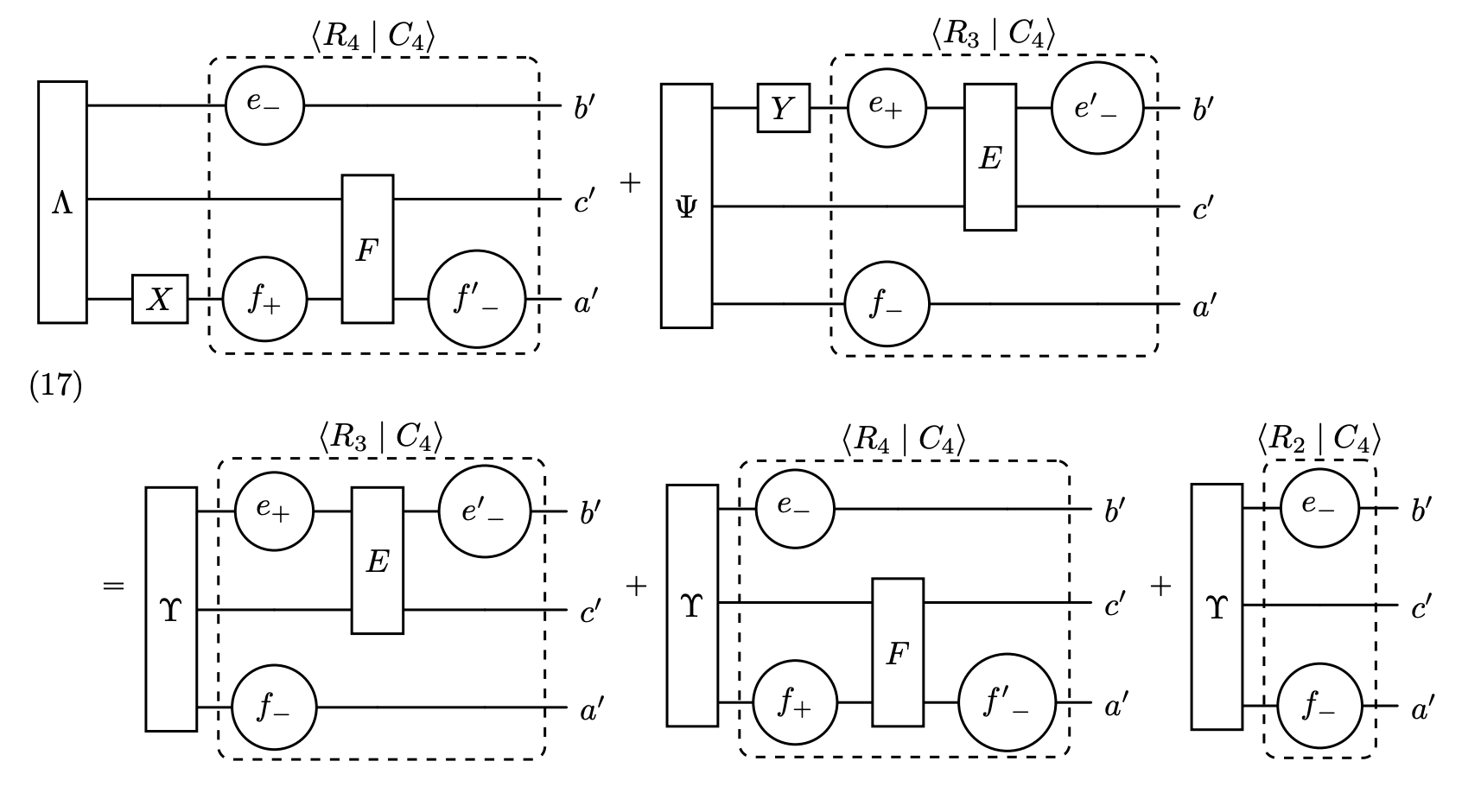
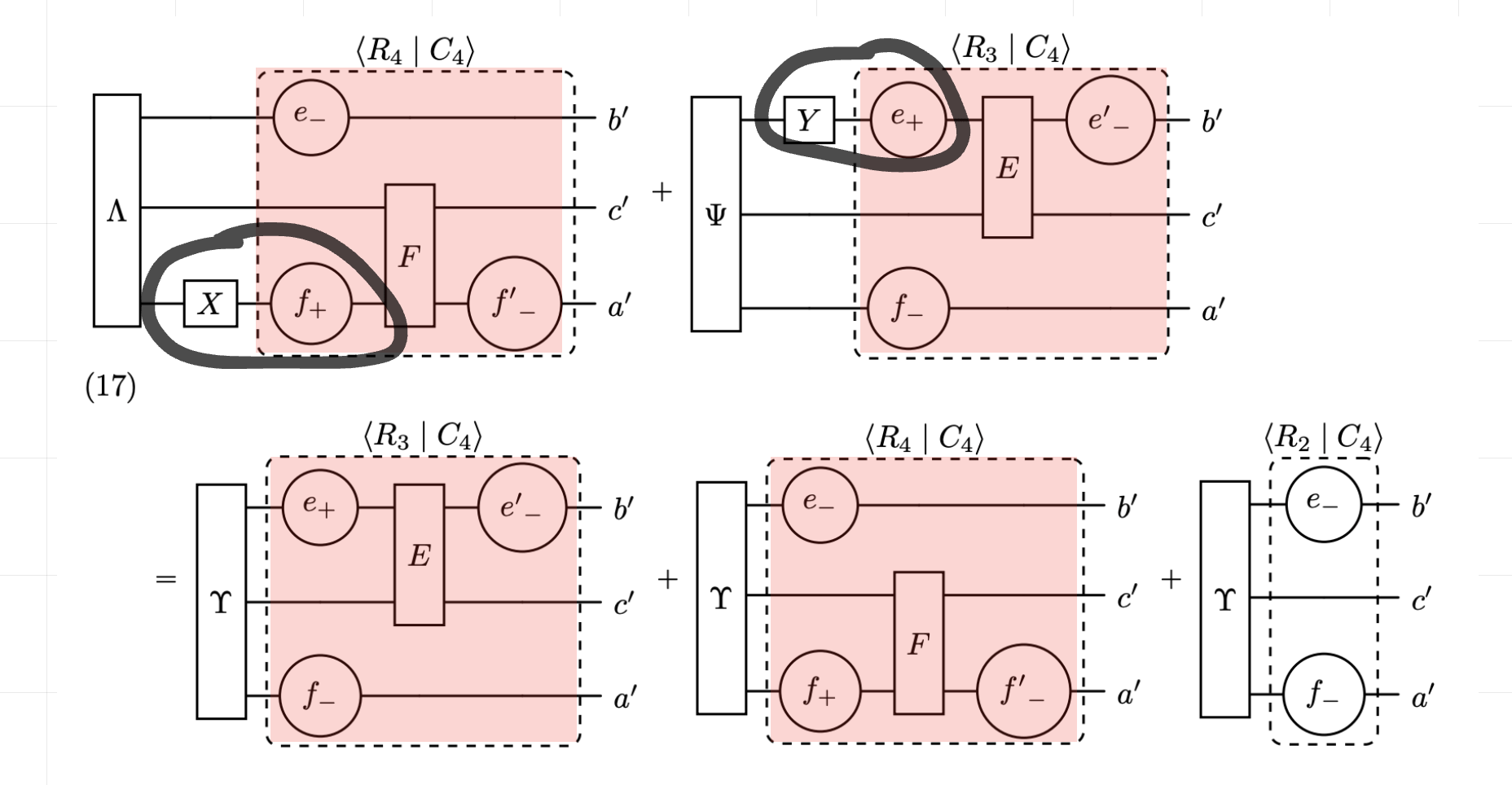
Simultaneous face reduction
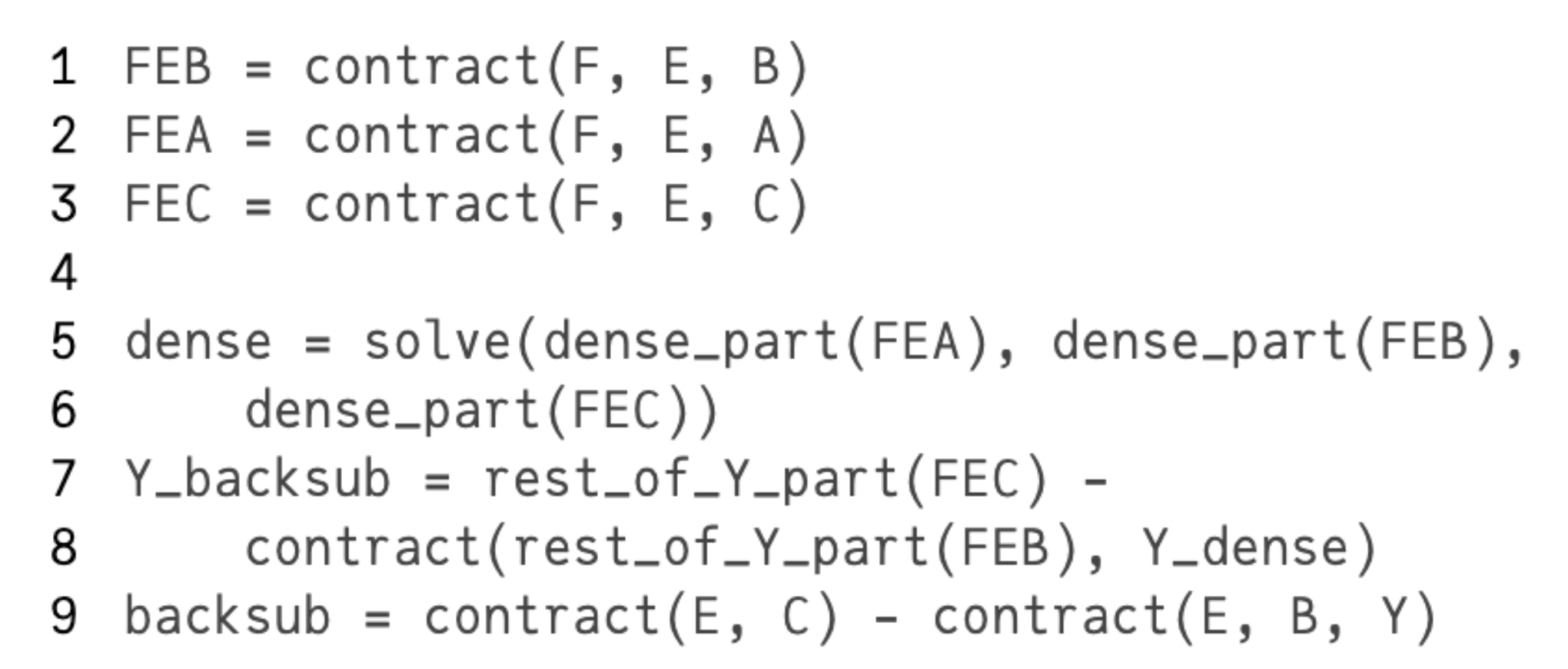
Dense system after clearing
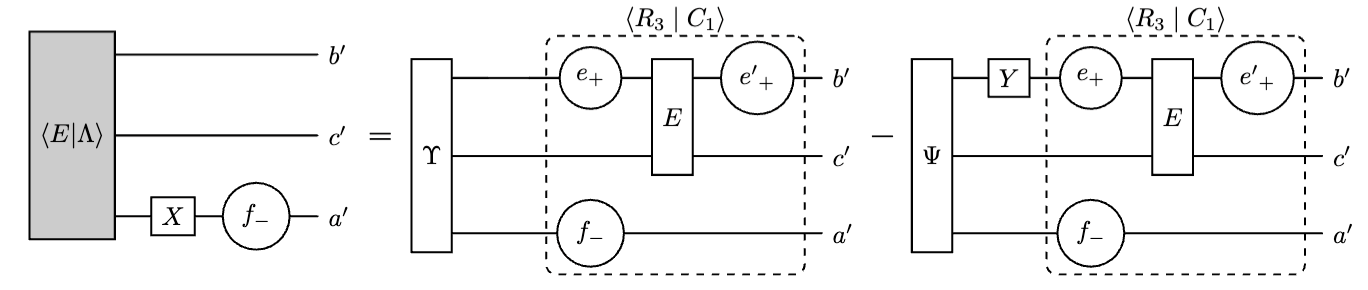
X backsub
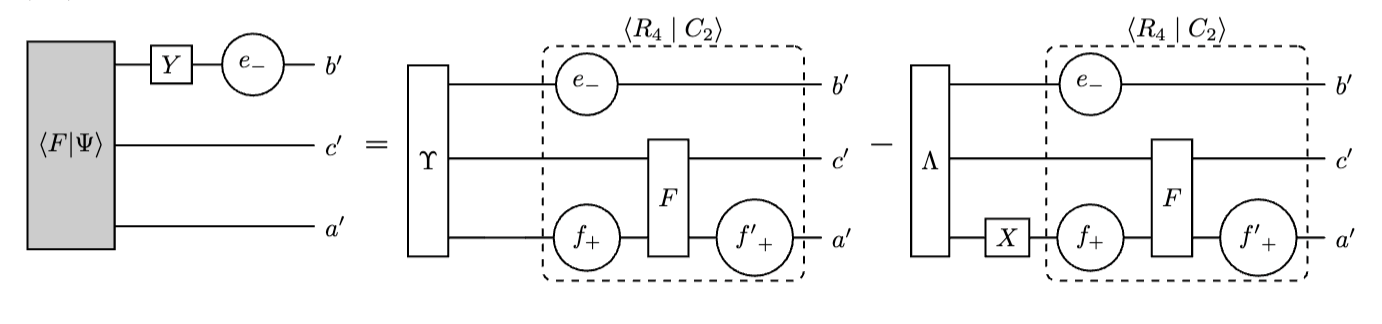
Y backsub
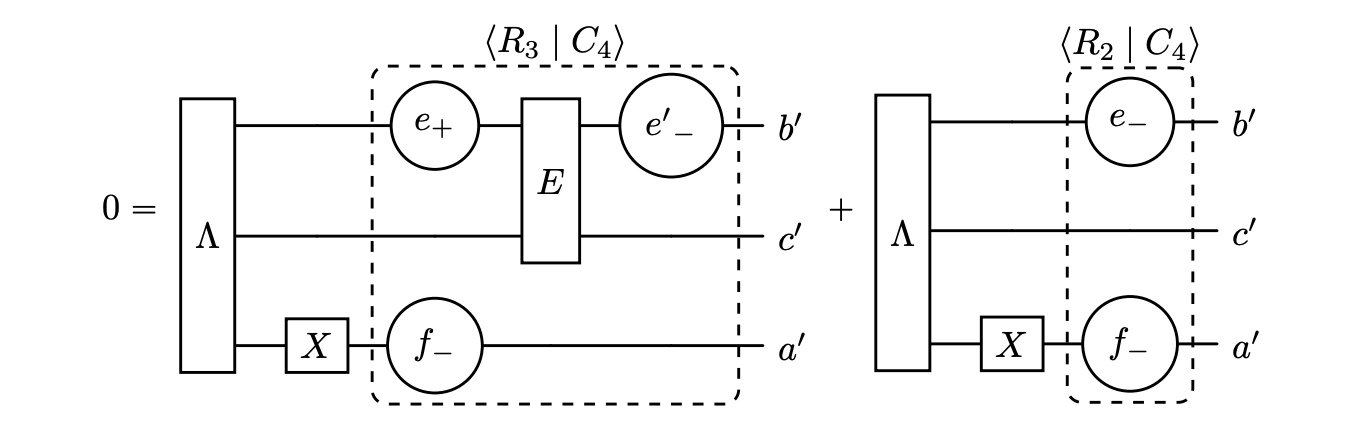
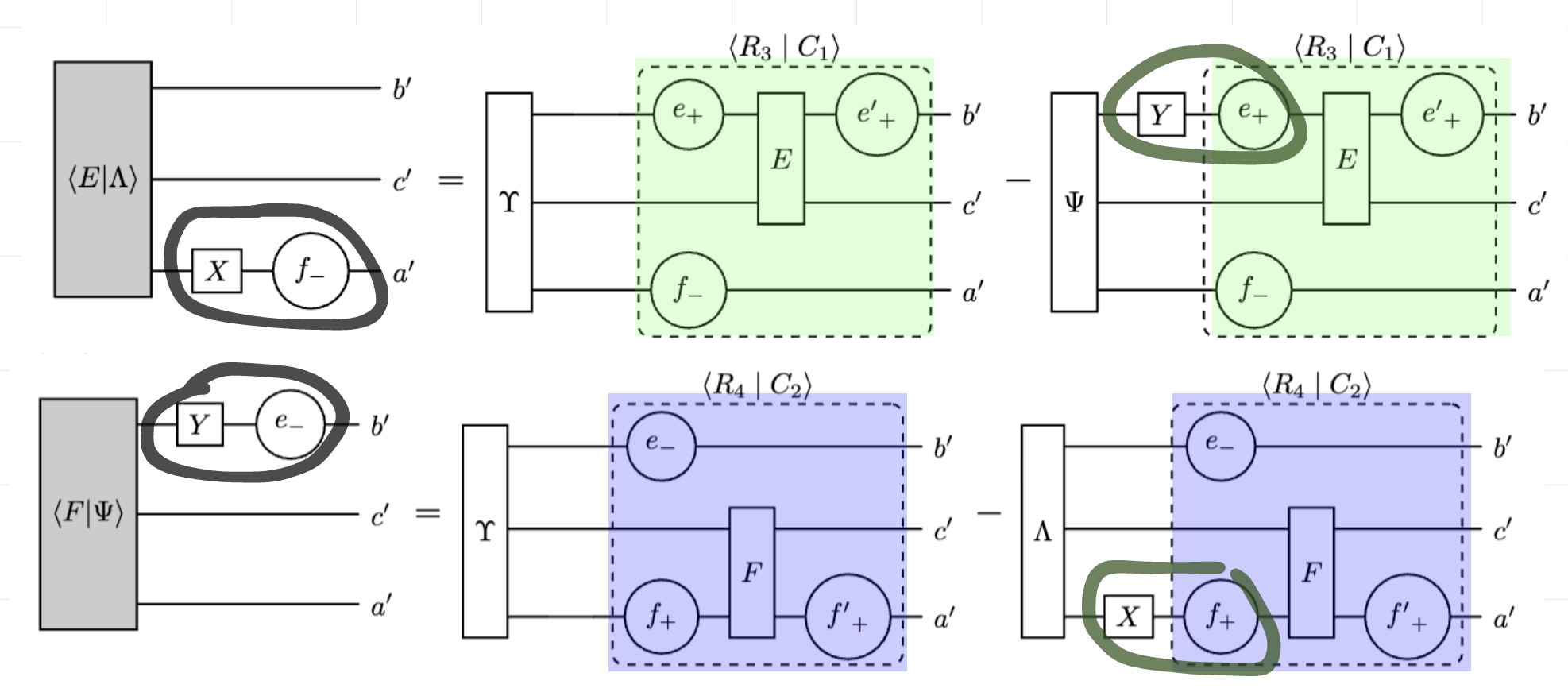
E clearing A
F clearing B
Region with small number of variables
Solve linear system
Backsubstitution
Given
Find
Such that
My Idea: face reducing tensors with the following properties to get commuting behavior for all 3 face reducing tensors
By Chris Liu
QE2 Presentation delivered in Spring 2024



