







cirquit
PhD student with a focus on machine learning, distributed systems and functional programming.
SLAM With Kalman Filtered Odometry in O(1)
Abschlussvortrag zur Masterarbeit
Aufgabensteller: Prof. Dr. Kranzlmüller
Betreuer: Tobias Fuchs
Datum des Vortrags: 21.03.2019
Autonomous Driving
1
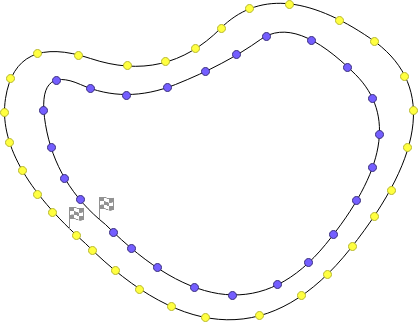
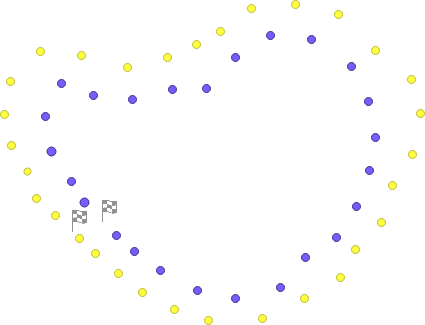
Real track
Seen track
UAS Munich Team
2
Combustion
Since 2006
Electrical
Since 2010
Driverless
Since 2017
Interdisciplinary team of 100+ students from UAS Munich & LMU
Simulatenous Localization and Mapping
3
Sensors
Localization
Mapping
Estimated Position
Environmental Map
Autonomous Pipeline
4
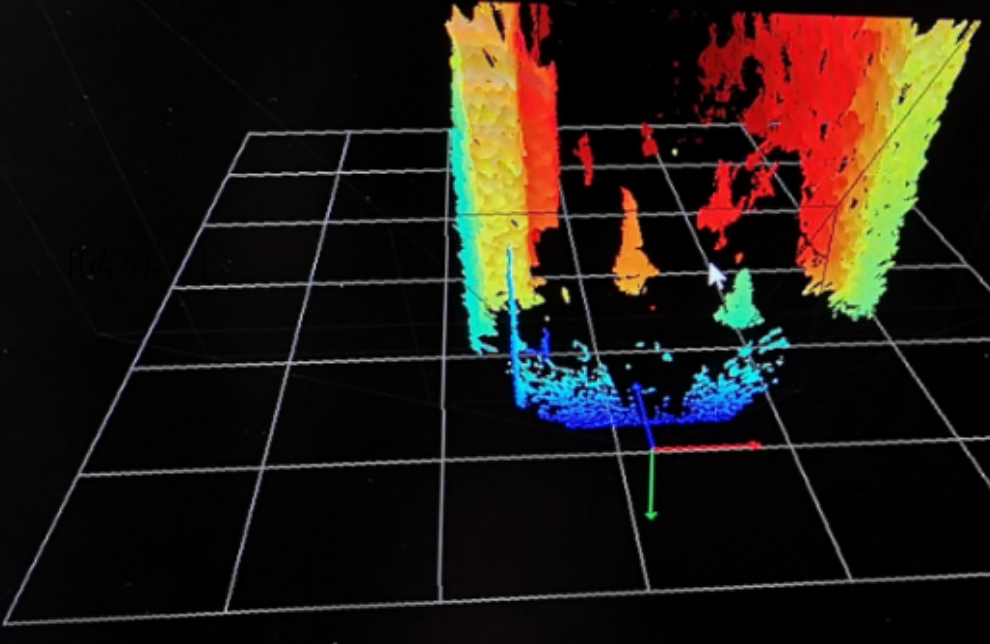
Visual Sensor
Neural Network
SLAM
Trajectory
Planning
Velocity Sensor
Accelerometer
Vehicle
Control Unit
Sensors
Preprocessing
Planning
Excecution
Master Thesis
Problem Statement
5
How can heterogeneous sensor inputs be combined in a SLAM process component with constant overhead and improved precision?
SLAM Design - Localization
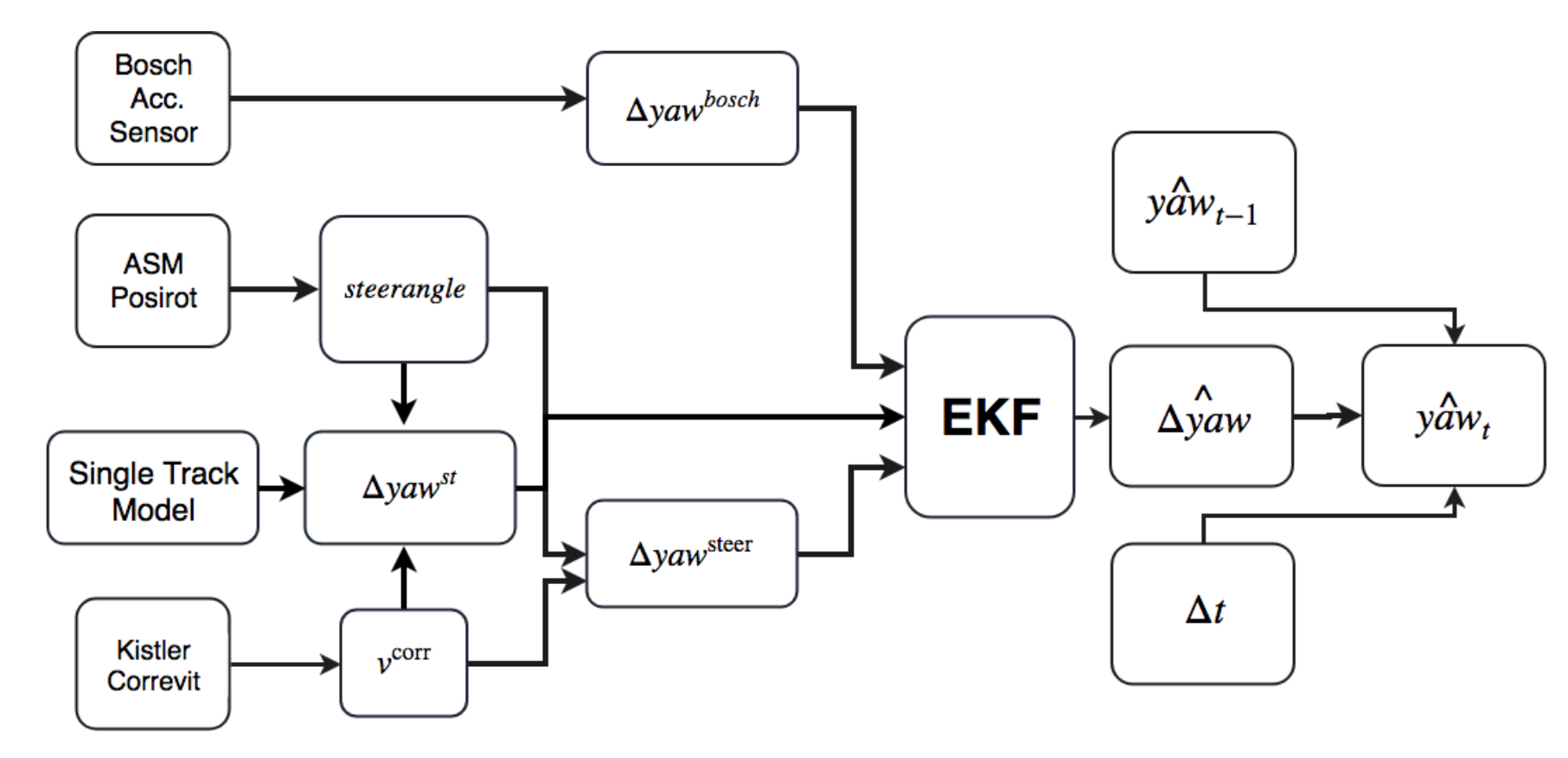
Yaw Rate (rad/s) EKF (4x1)
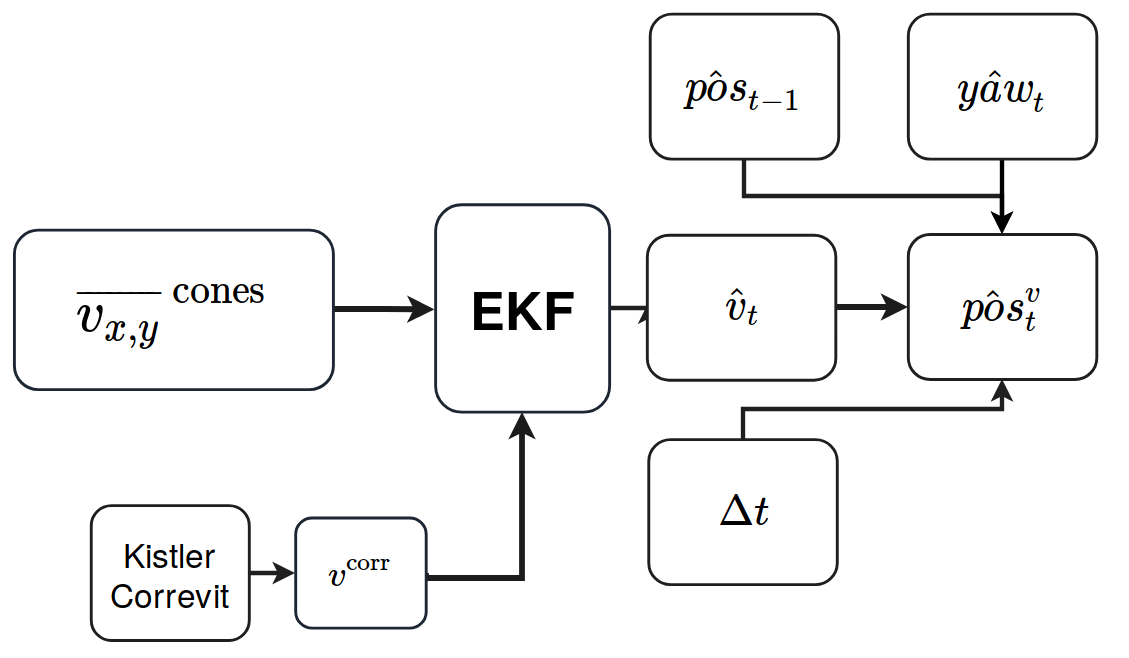
Velocity (m/s) EKF (4x2)
6
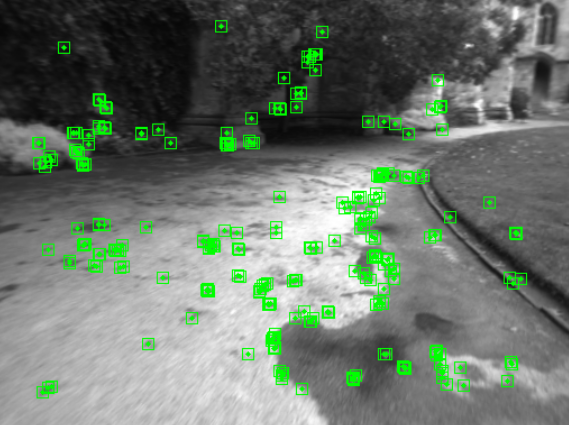
Visual Odometry
7
SLAM Design - Localization - Vel. EKF
8
SLAM Design - Localization - Yaw Rate EKF
9
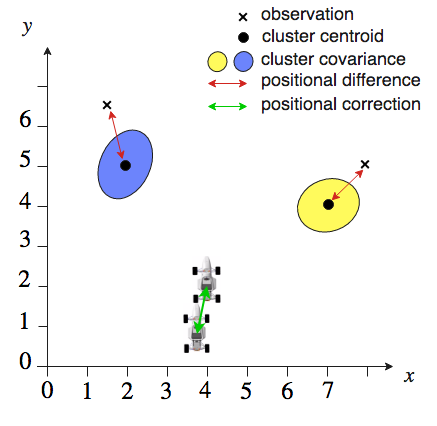
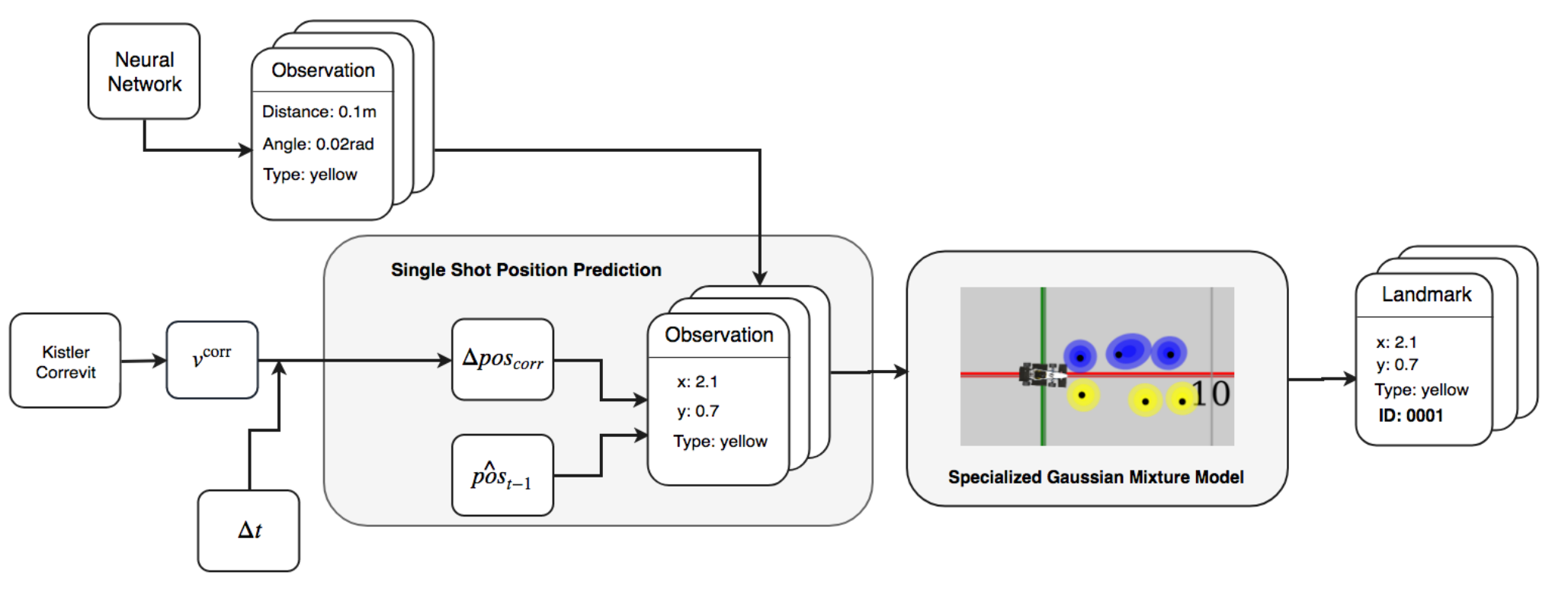
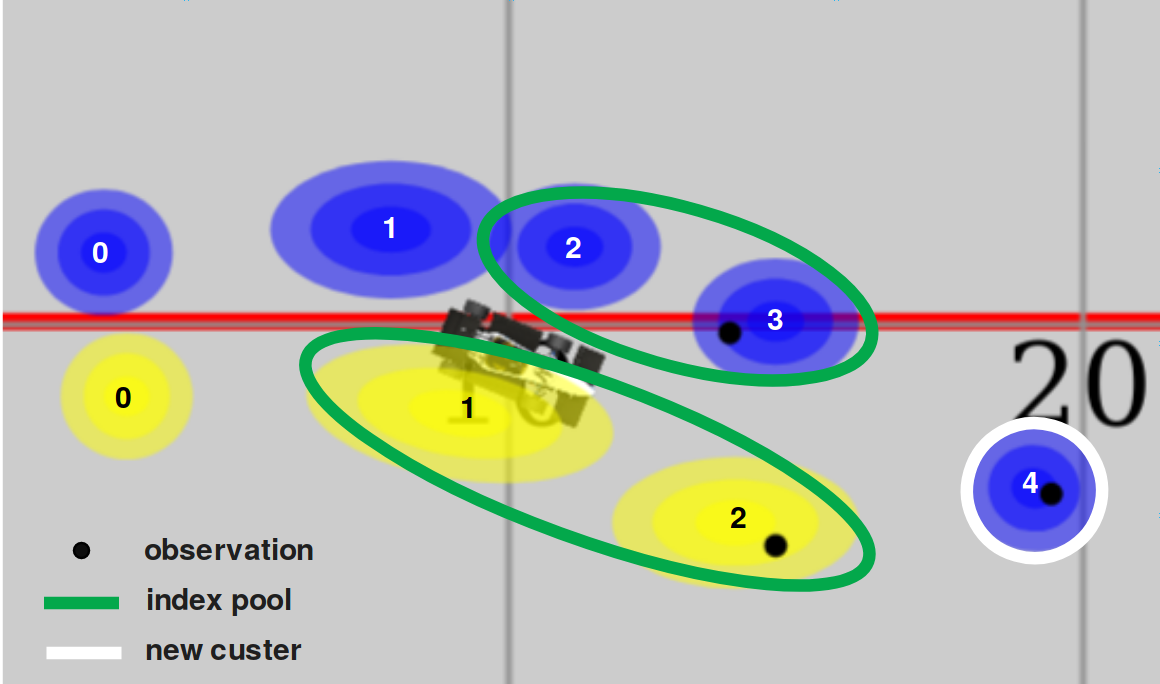
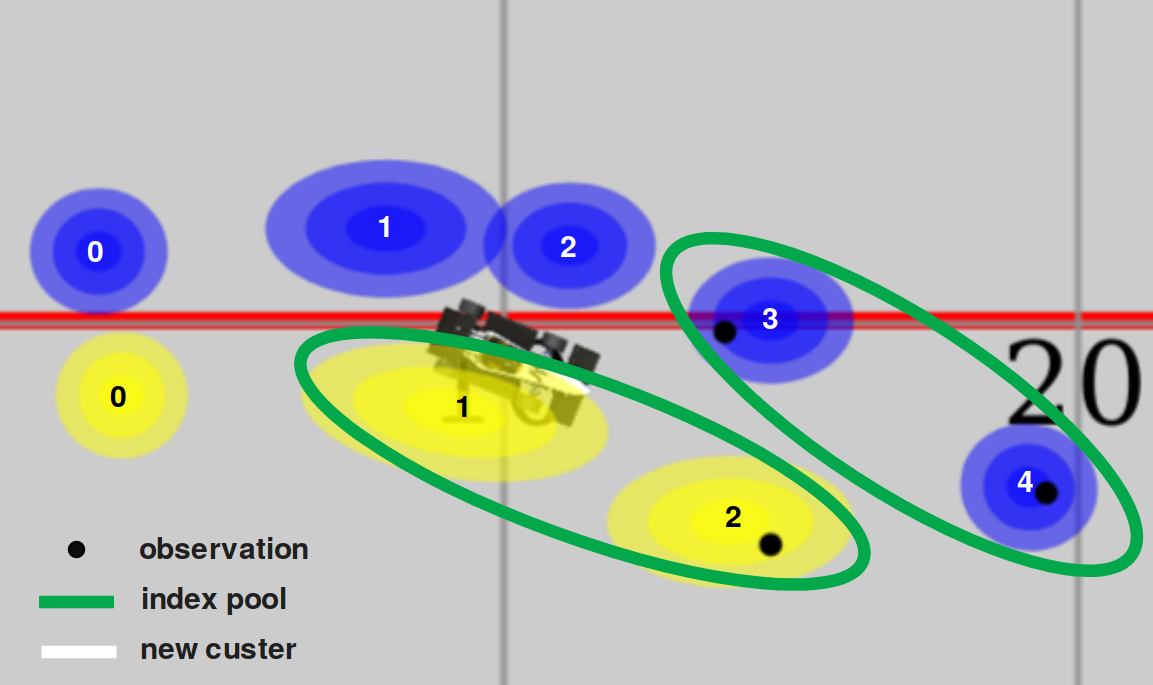
SLAM Design - Mapping
10
SLAM Design - Mapping
Possible preallocation
$$\mathcal{O}(N^2) \rightarrow\mathcal{O}(N)$$
$$\mathcal{O}(N) \rightarrow\mathcal{O}(1)$$
11
SLAM Design - Mapping
12
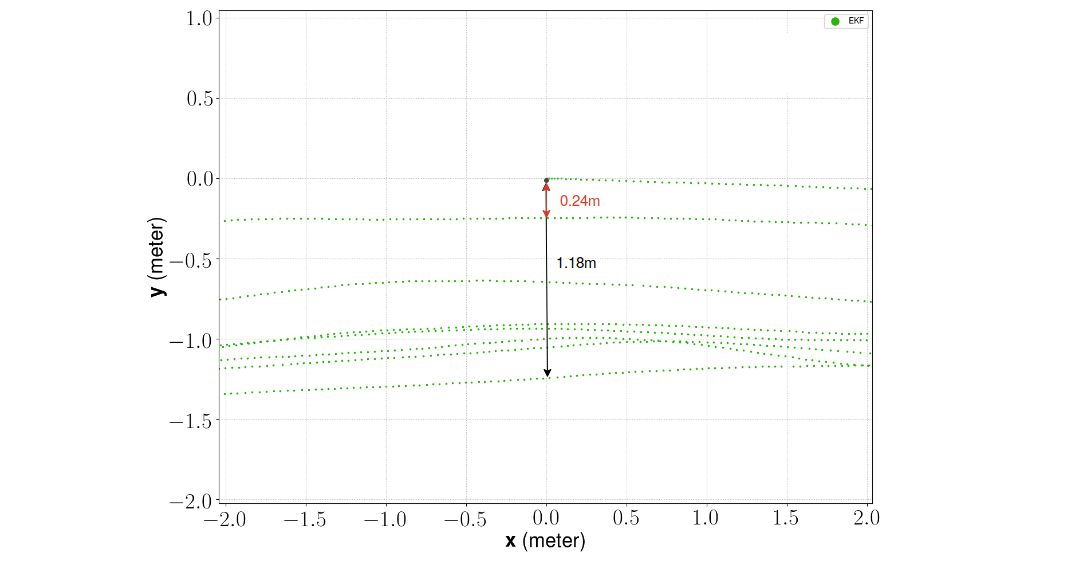
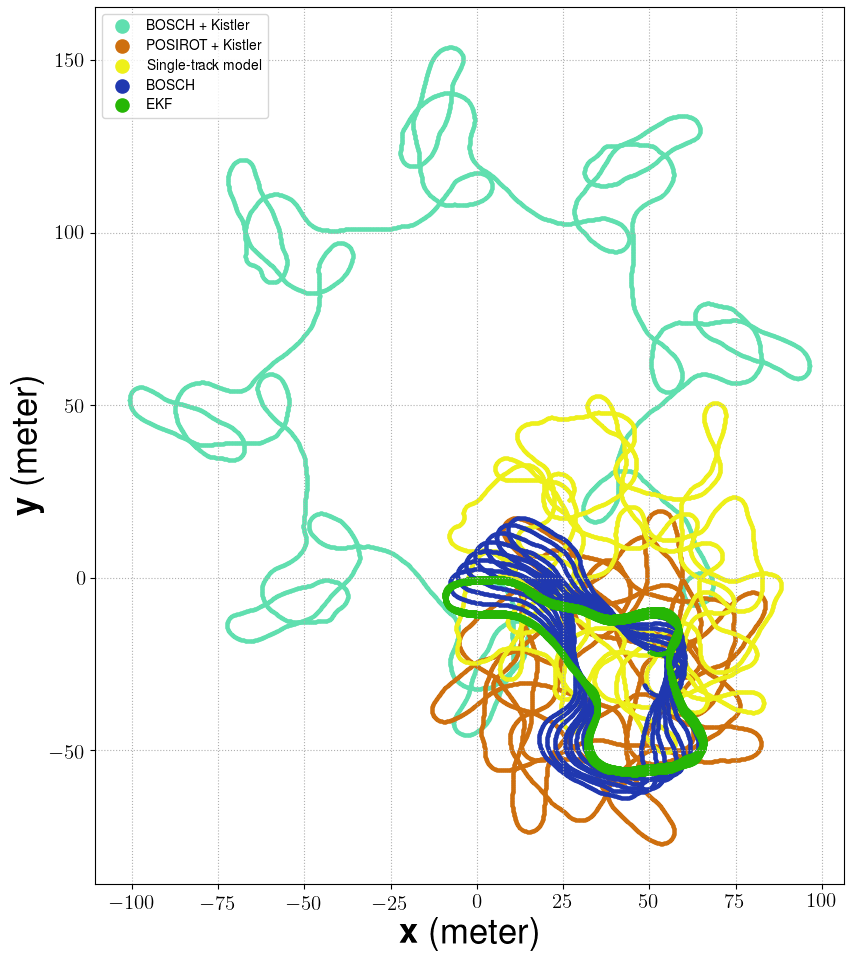
Evaluation - Positional Error
13
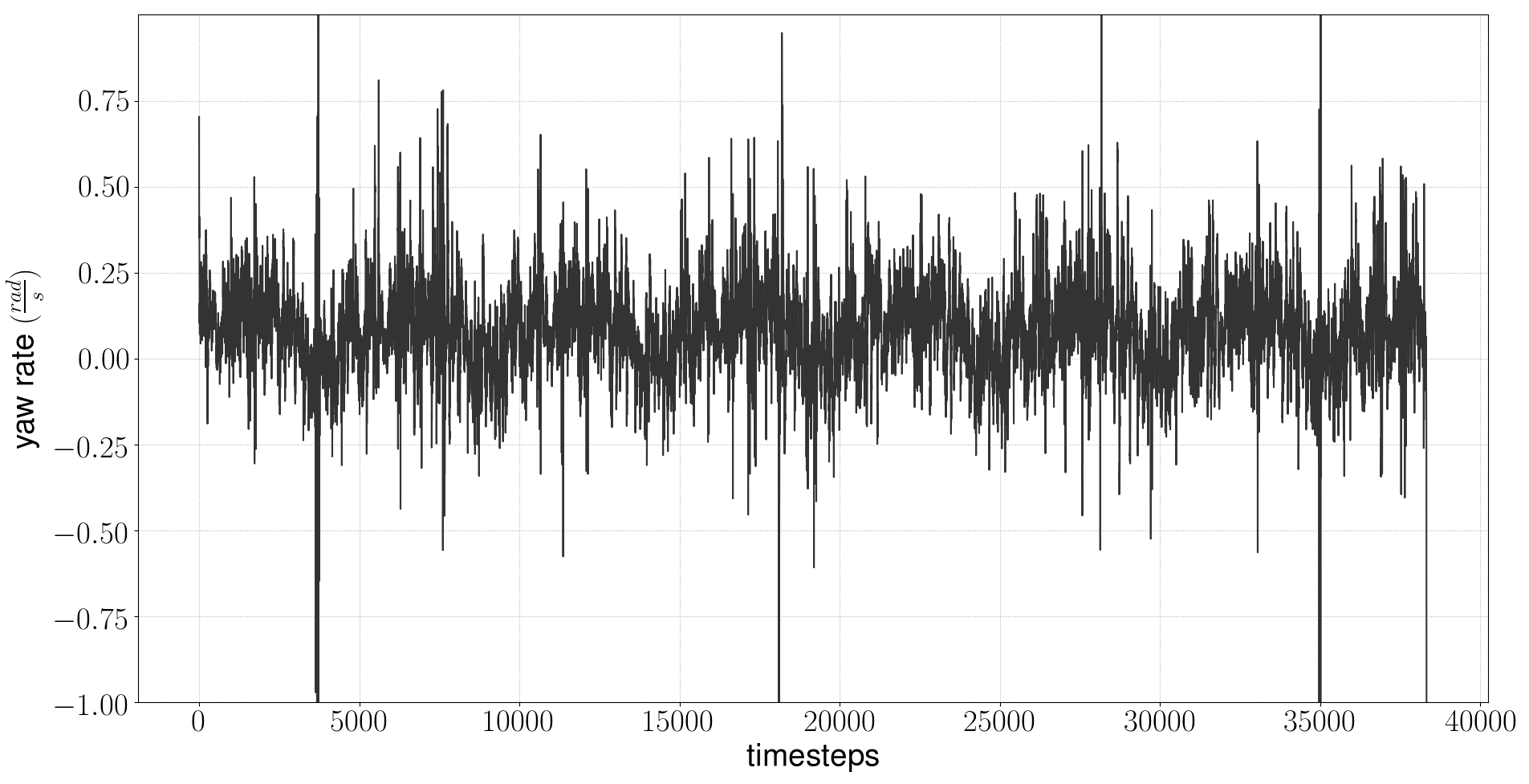
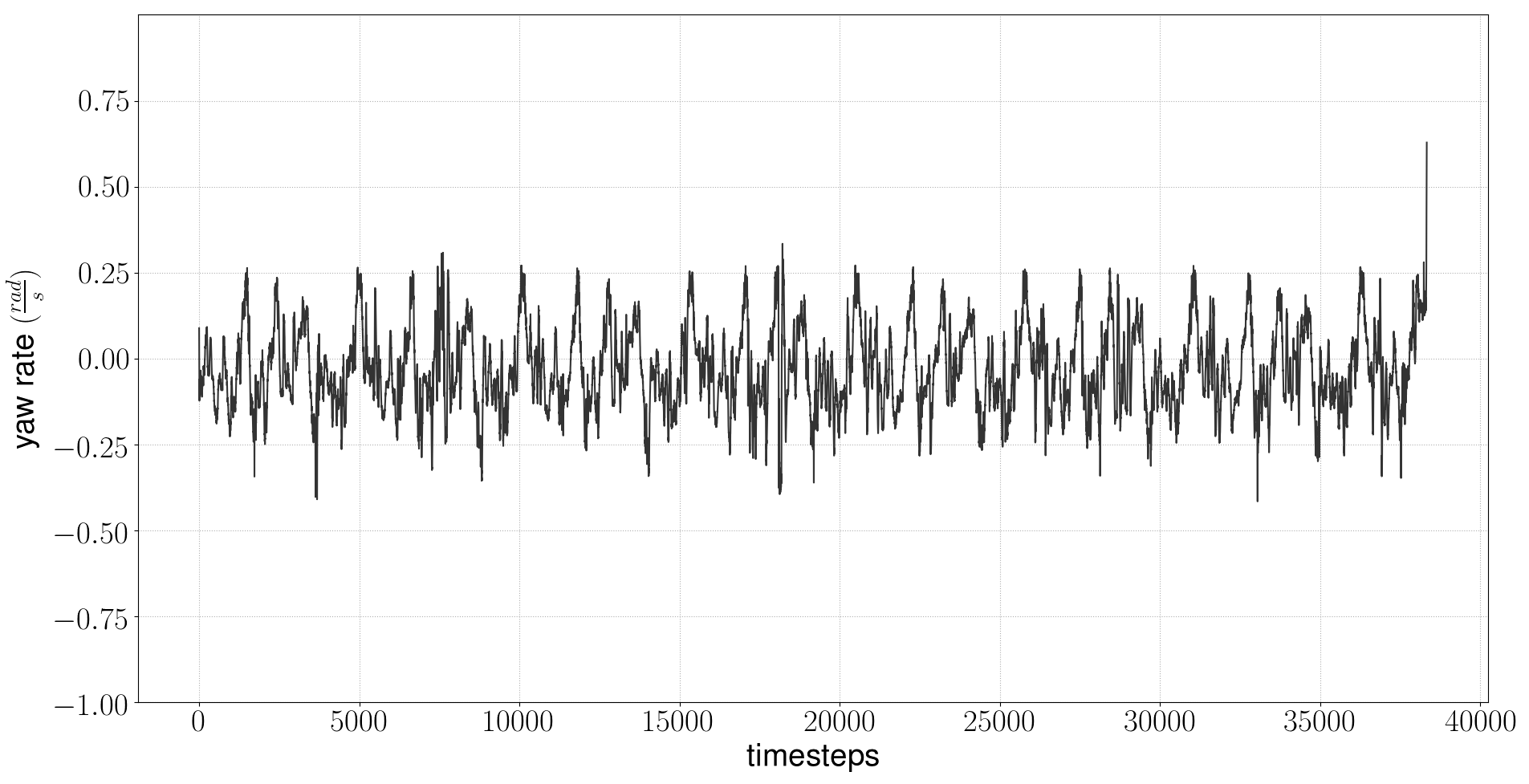
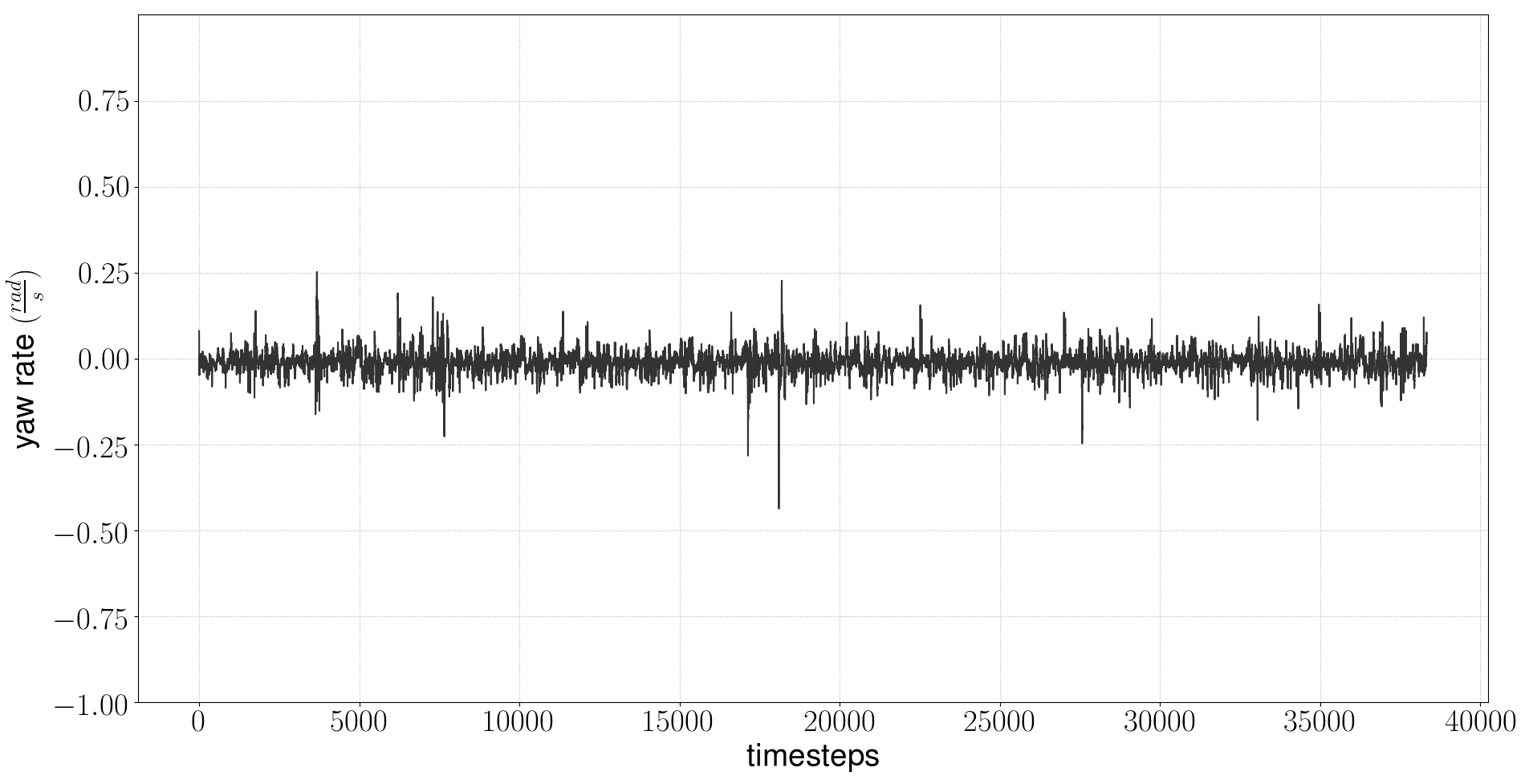
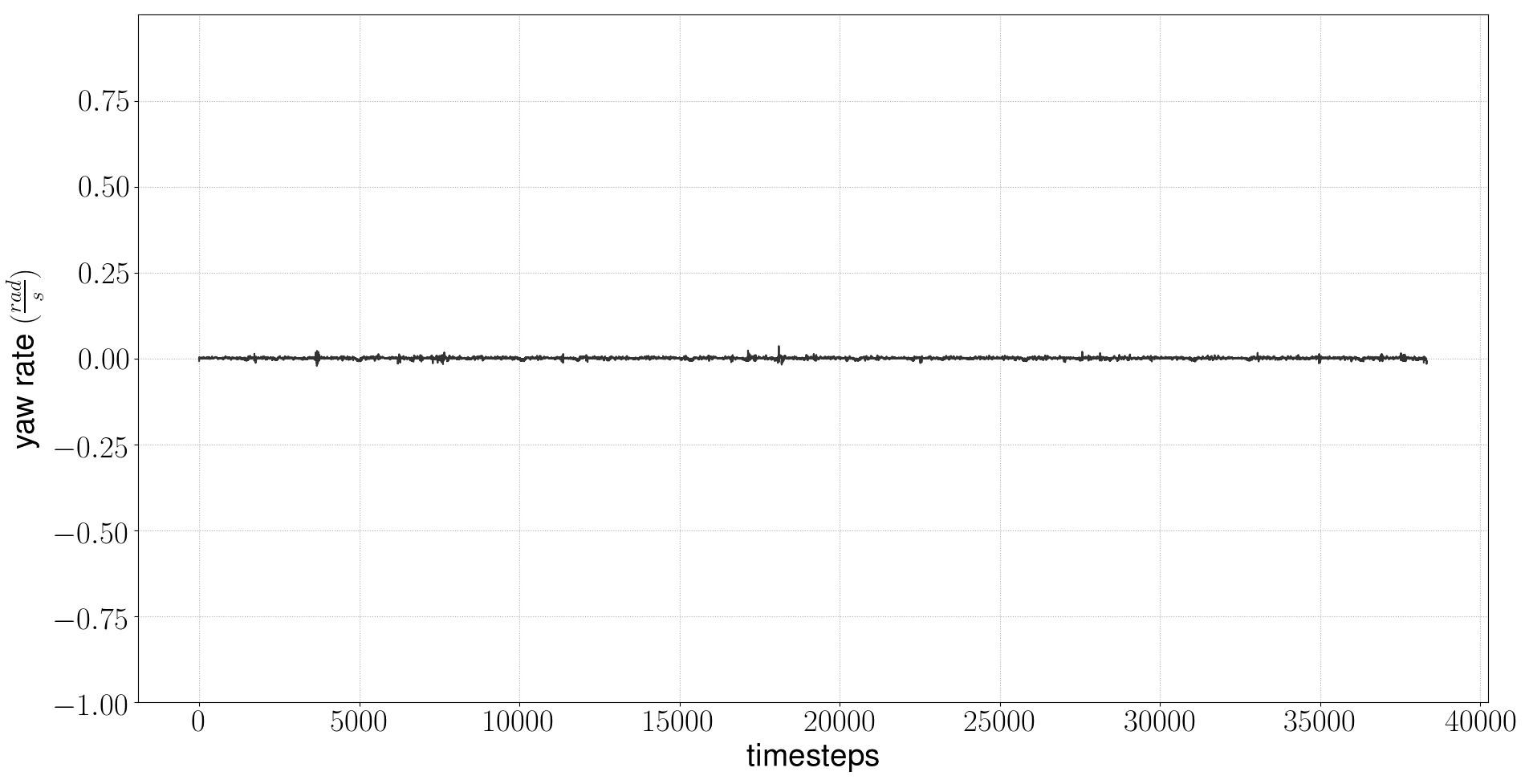
Evaluation - Yaw Rate EKF
14
Difference to EKF Yaw Rate
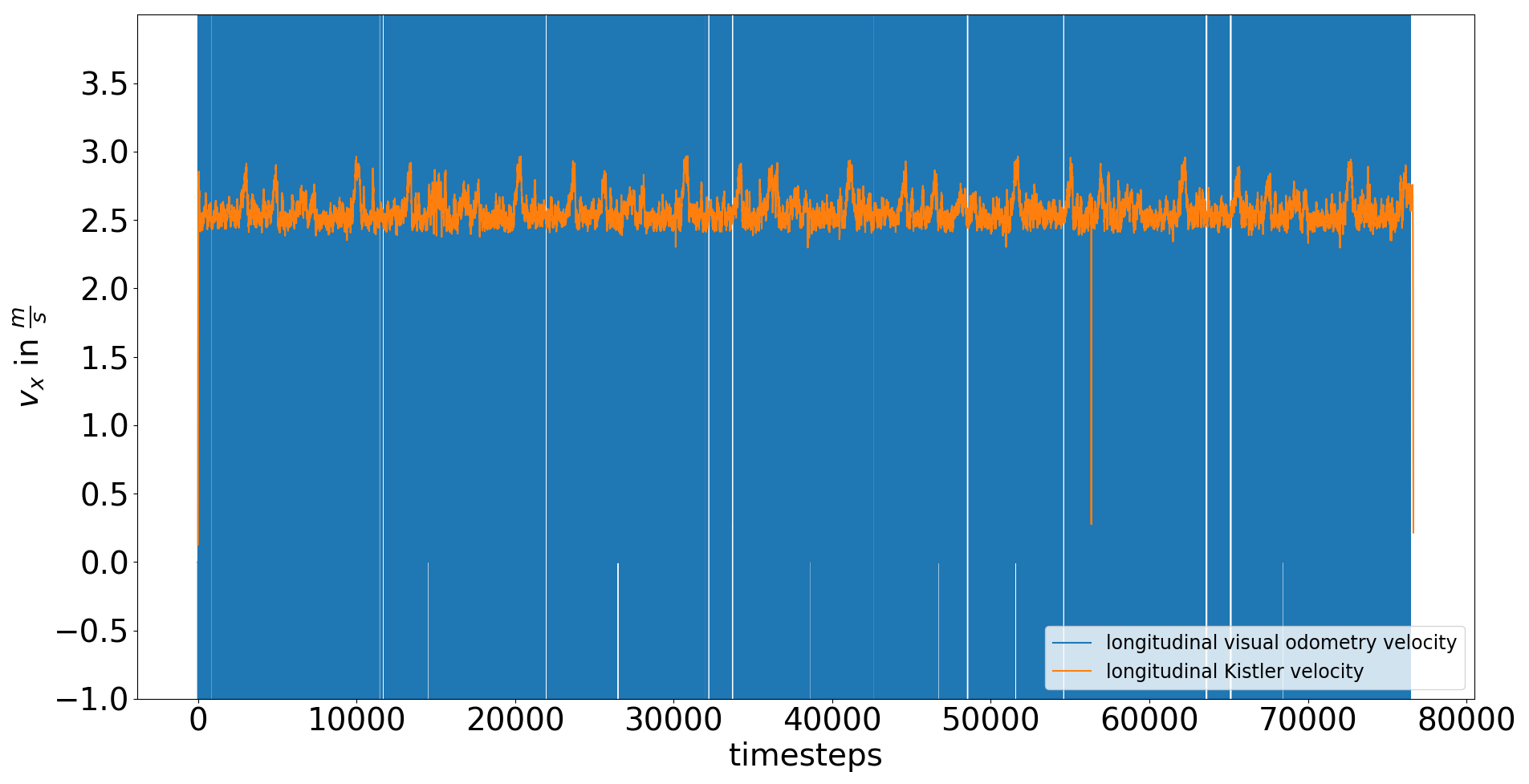
Evaluation - Velocity EKF
15
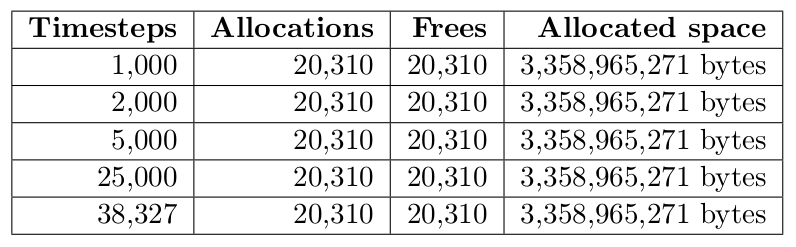
Evaluation - Space Complexity
16
valgrind
summary of the offline logging
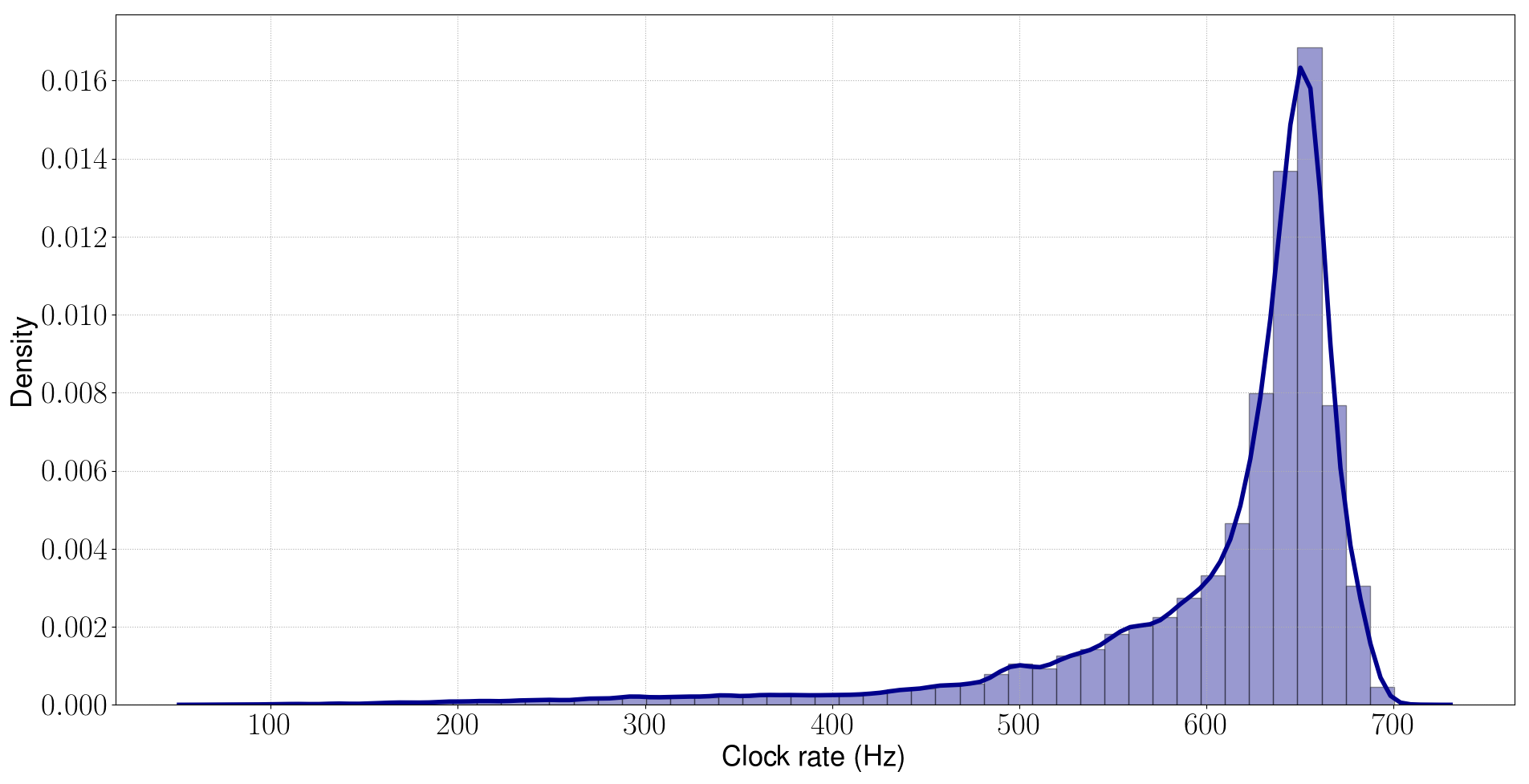
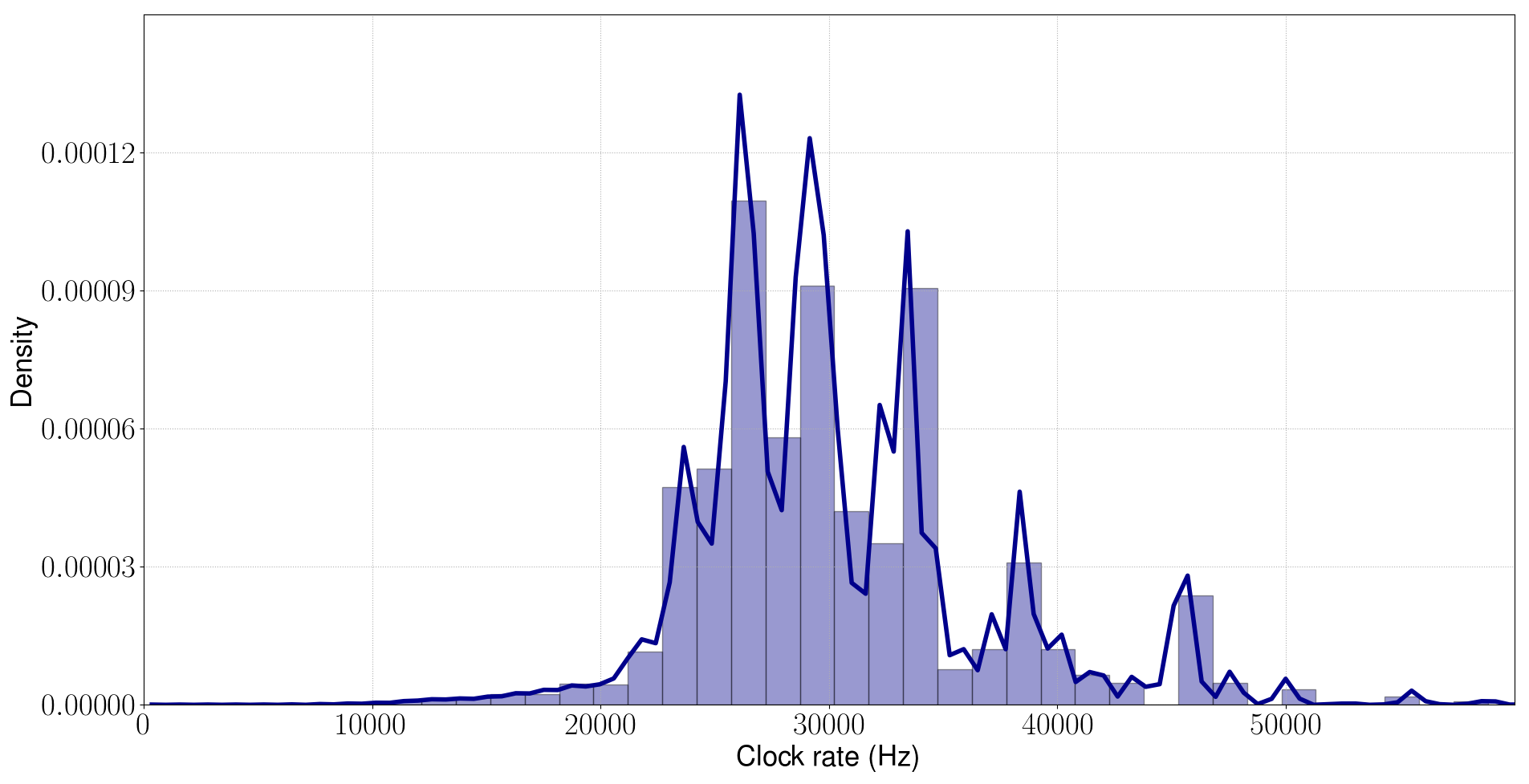
Evaluation - Time Complexity
17
$$\mu = 609 \text{ Hz}, \;\;\;\; \sigma^2 = 82 \text{ Hz}$$
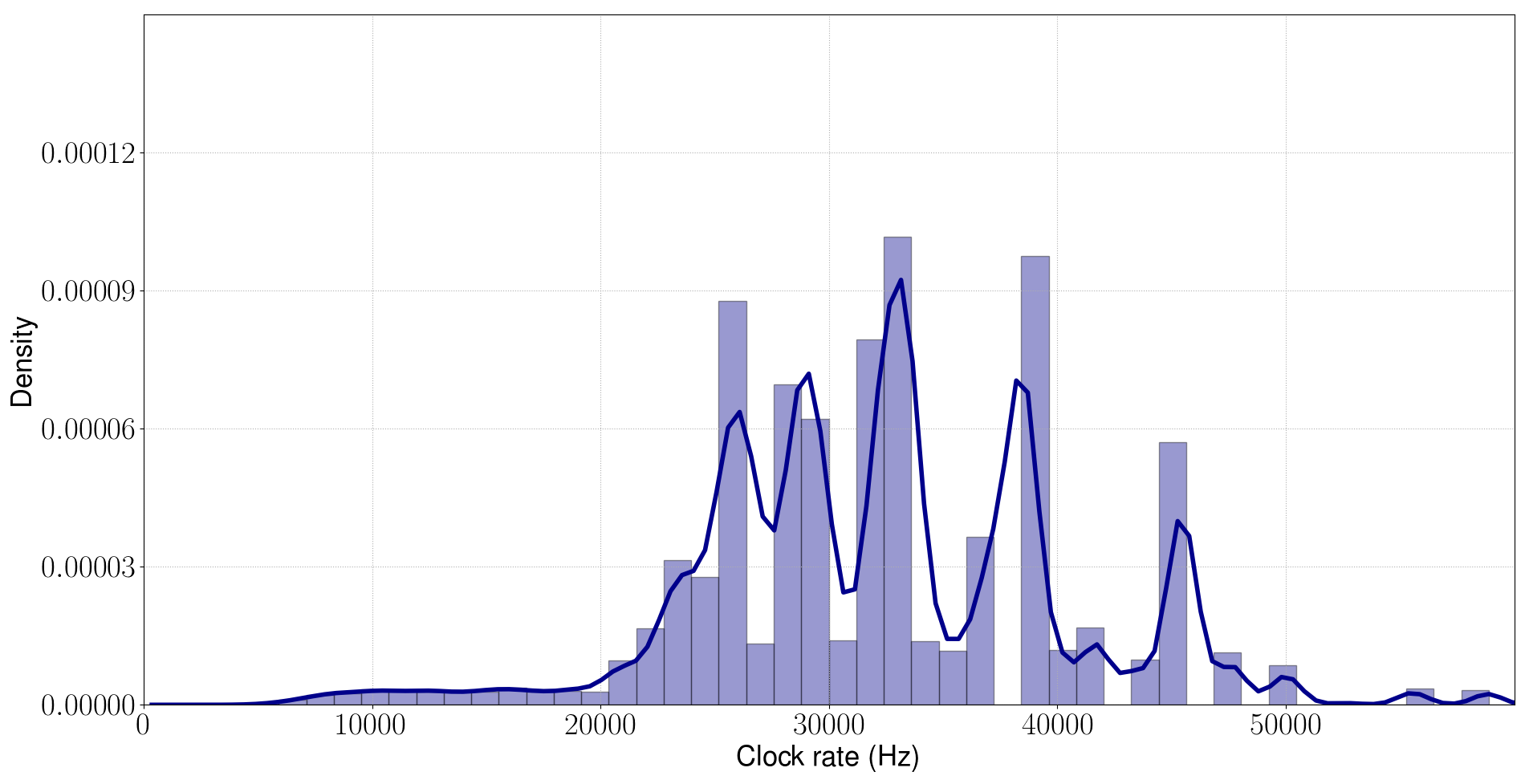
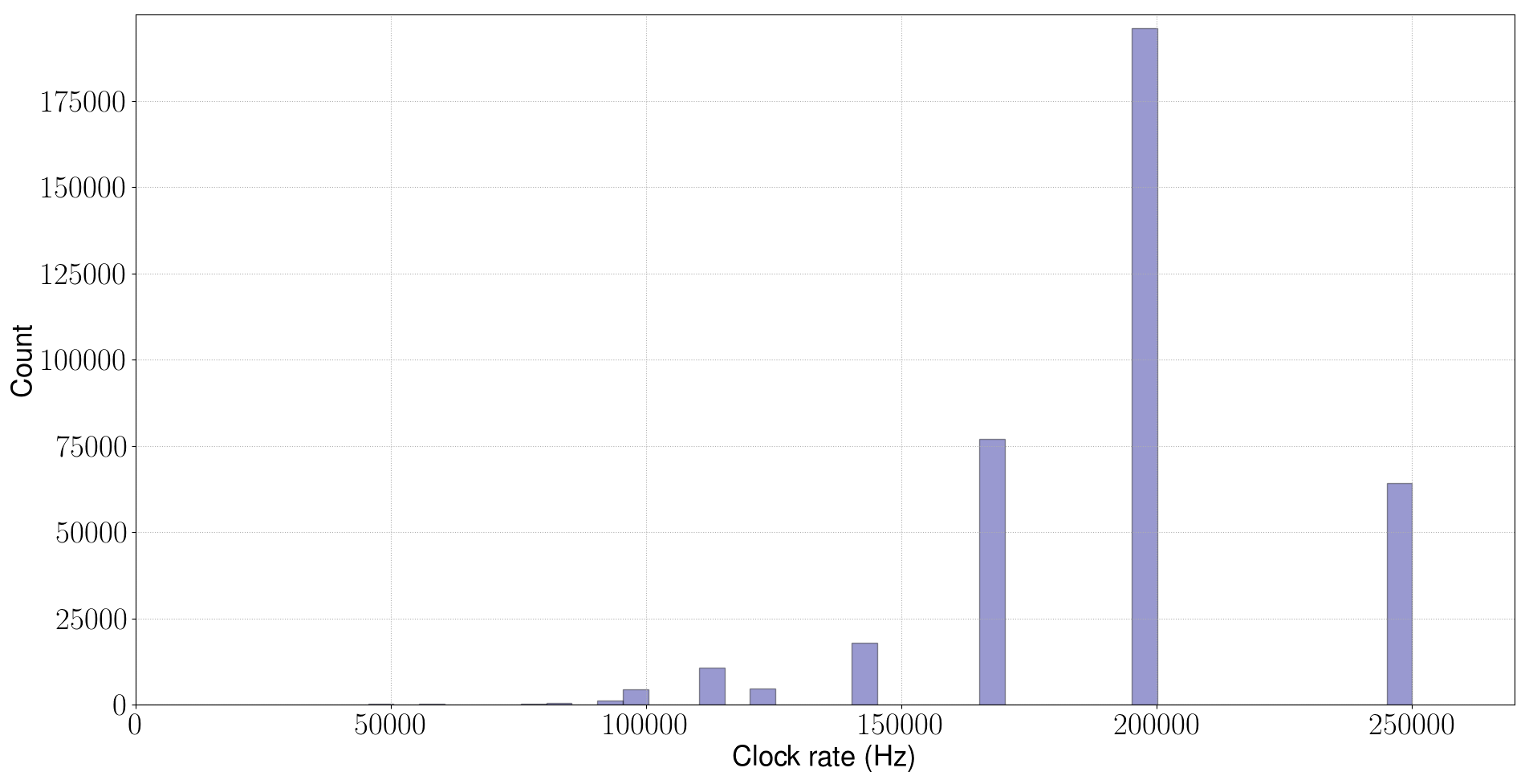
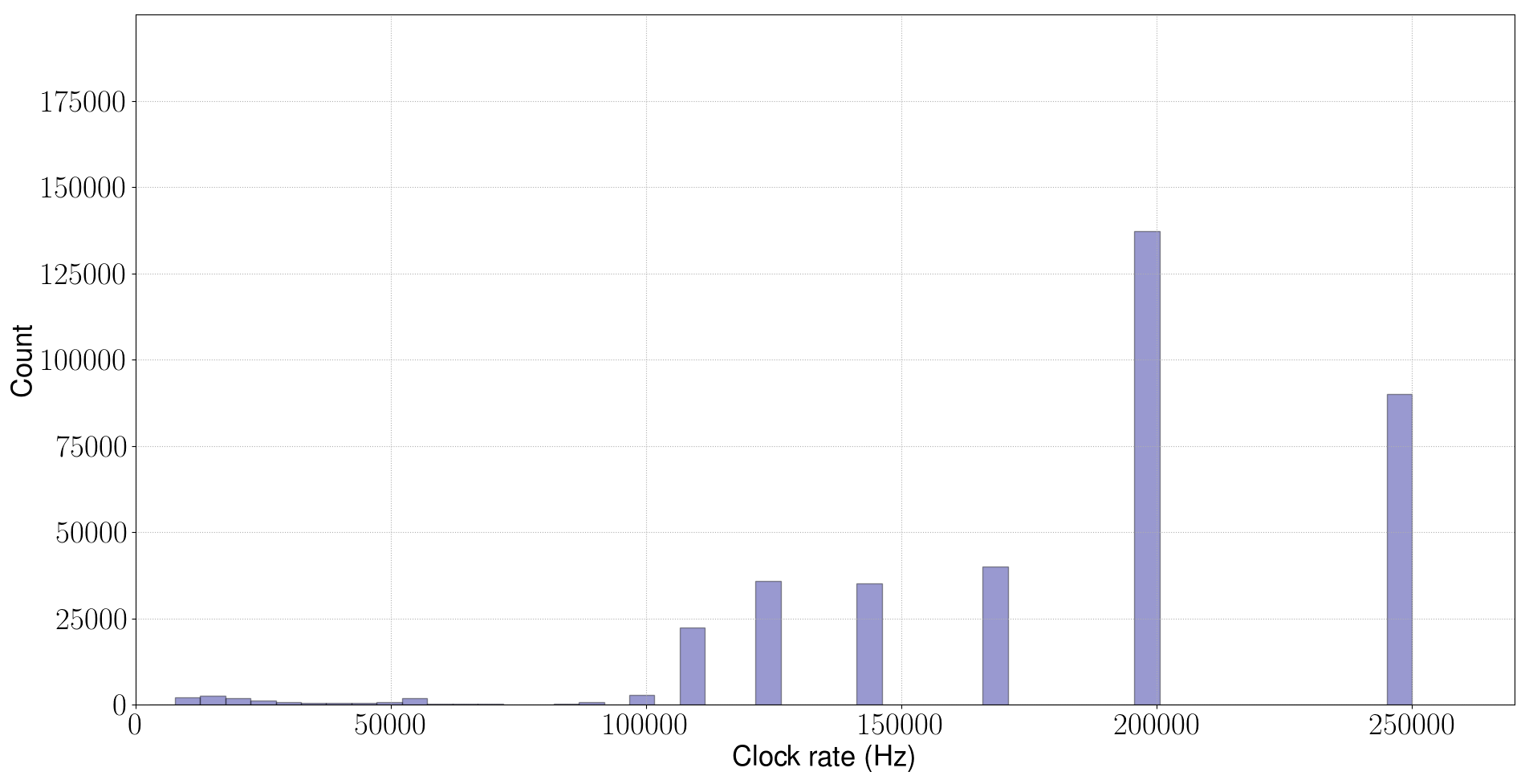
Evaluation - Time Complexity
18
$$\mathcal{O}(1)$$
$$\mathcal{O}(N)$$
logging
without
logging
$$\mu = 30433 \text{ Hz}, \;\;\;\; \sigma^2 = 6305 \text{ Hz}$$
$$\mu = 32488 \text{ Hz}, \;\;\;\; \sigma^2 = 8032 \text{ Hz}$$
$$\mu = 193061 \text{ Hz}$$
$$\sigma^2 = 36483 \text{ Hz}$$
$$\mu = 183201 \text{ Hz}$$
$$\sigma^2 = 54198 \text{ Hz}$$
Summary
19
Future Work
Findings
$$\mathcal{O}(1)$$
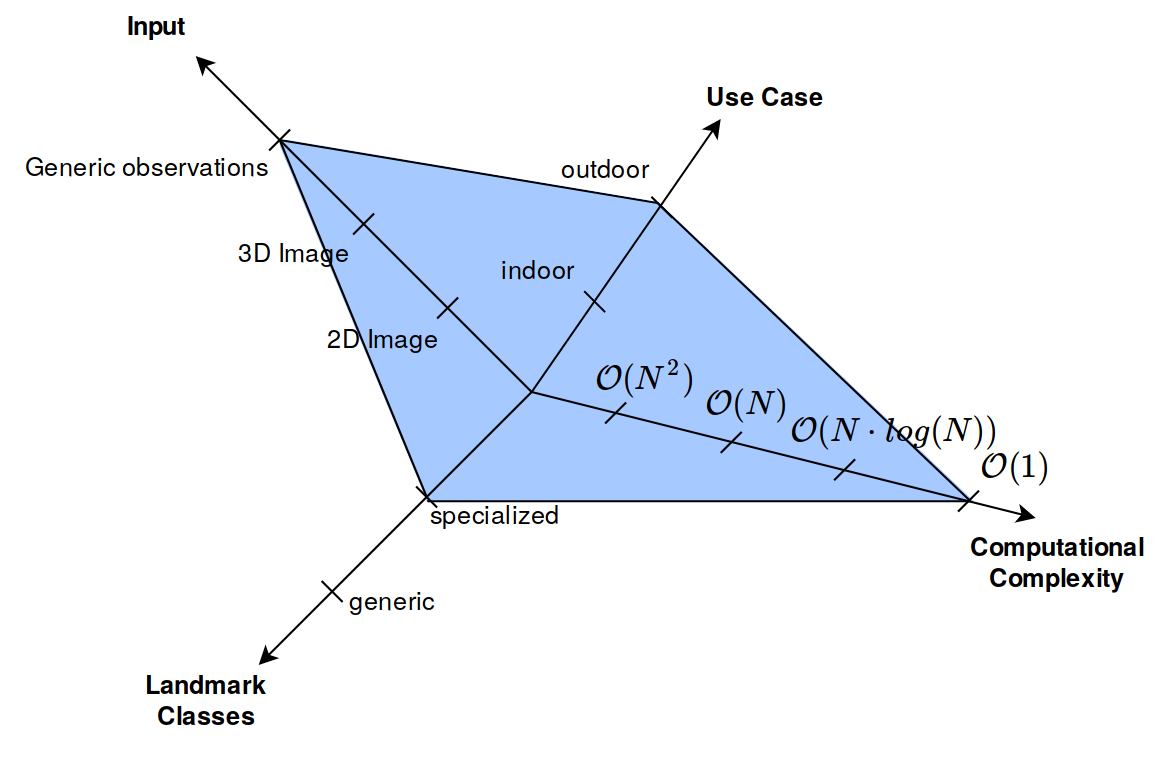
Backup #1: Related Work
20
MonoSLAM
ORB-SLAM2
FastSLAM
$$\mathcal{O}(N^2)$$
$$\mathcal{O}(N \log N)$$
Backup #2: Related Work
21
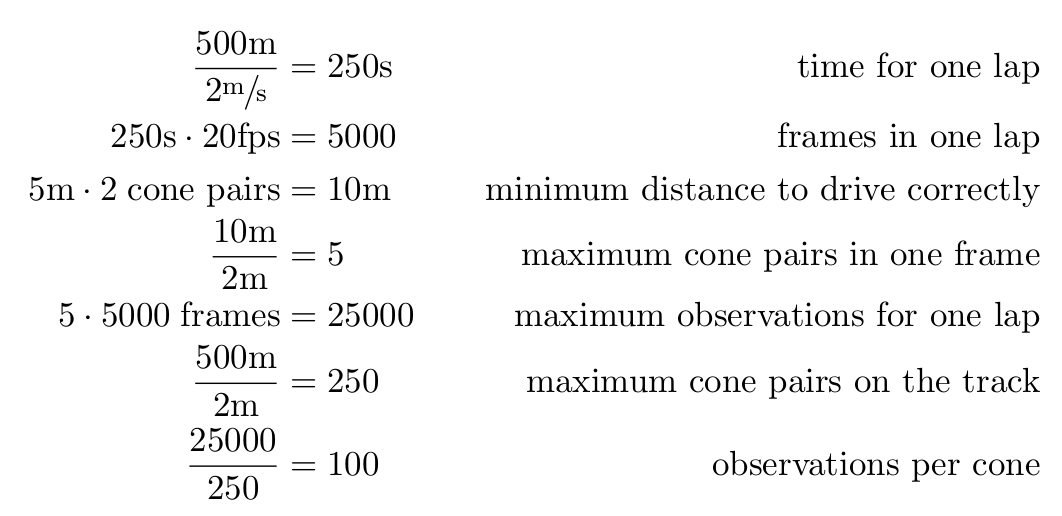
Backup #3: Data Assoc. Calculations
22
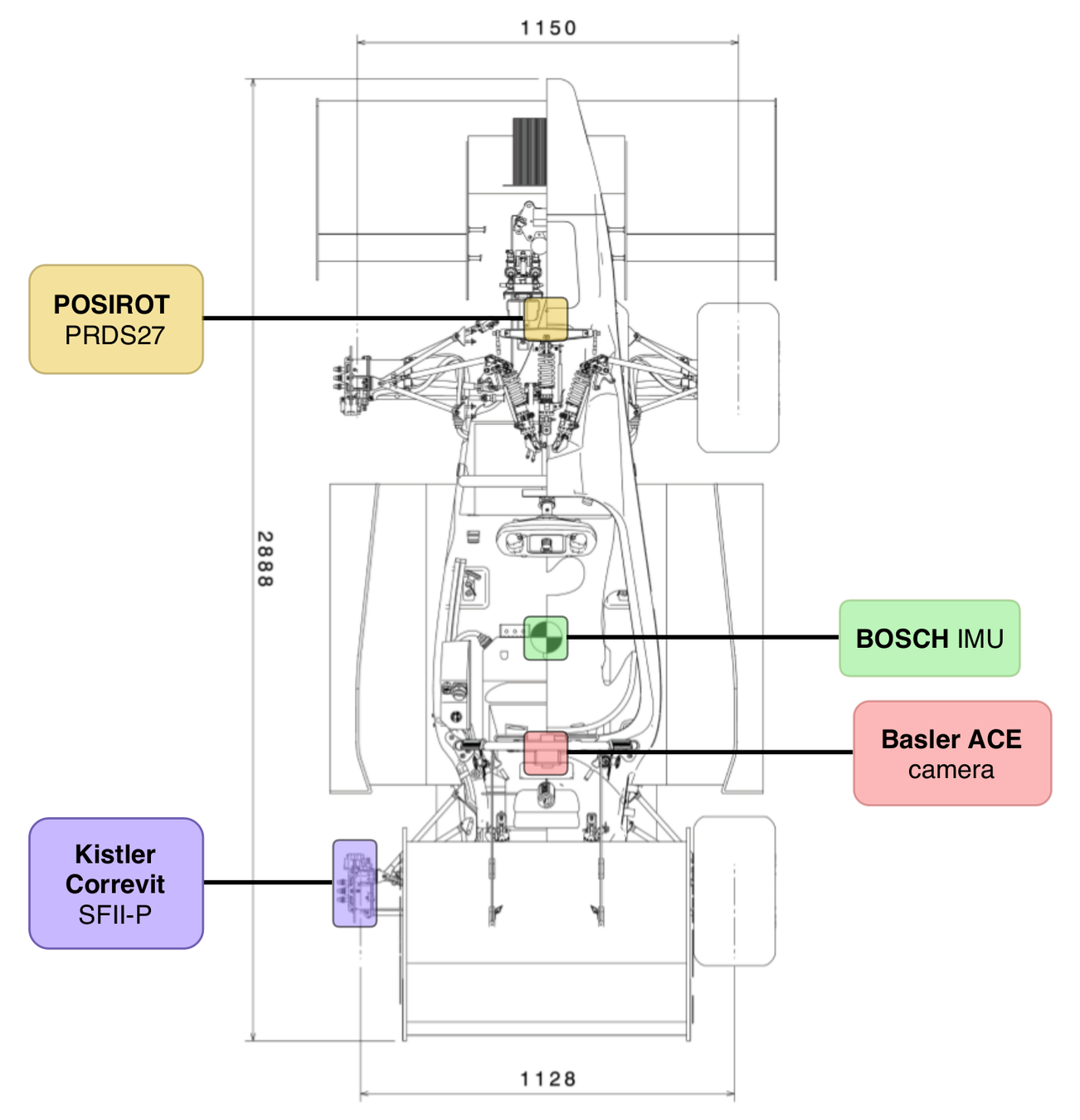
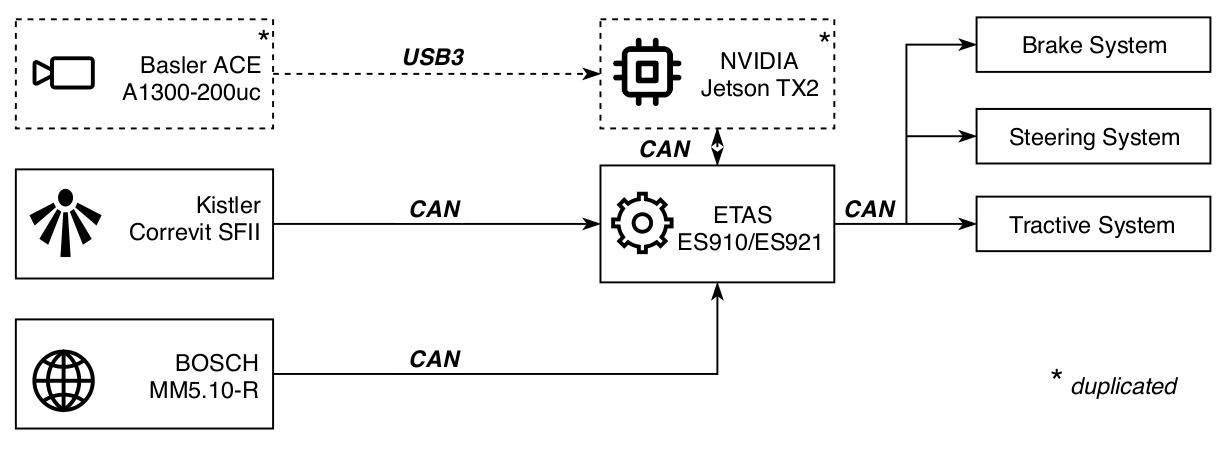
Backup #4: Hardware Overview
23
hard realtime
soft realtime
Backup #5: Cars Overview
24
FSAustria
2017
Business Plan
FSAustria
2017
Acceleration
FSGermany
2017
Gesamt
#3
#1
#1
FSItaly
2018
FSGermany
2018
Acceleration
FSGermany
2018
Gesamt
#5
#2
#2
Gesamt
Acceleration 0-100km/h: 2.1s
Logging from 02.08.2018
Extracted Values
Backup #6: Experimental Setup
25
By cirquit
Abschlussvortrag




