





cirquit
PhD student with a focus on machine learning, distributed systems and functional programming.
SLAM With Kalman Filtered Odometry in O(1)
Antrittsvortrag zur Masterarbeit
Aufgabensteller: Prof. Dr. Kranzlmüller
Betreuer: Tobias Fuchs
Datum des Vortrags: 20.02.2019
Autonomous Driving
1
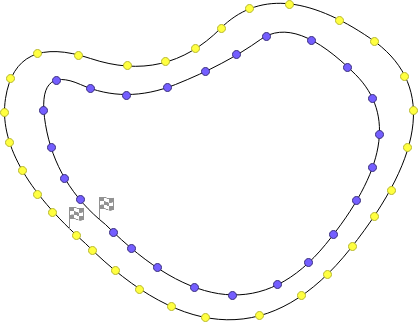
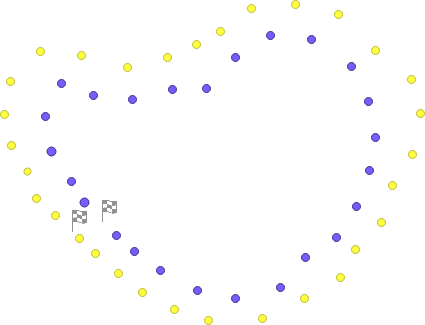
Real track
Seen track
UAS Munich Team
2
Combustion
Since 2006
Electrical
Since 2010
Driverless
Since 2017
Interdisciplinary team of 100+ students from UAS Munich & LMU
Simulatenous Localization and Mapping
3
Sensors
Localization
Mapping
Estimated Position
Environmental Map
Autonomous Pipeline
4
Visual Sensor
Neural Network
SLAM
Trajectory
Planning
Velocity Sensor
Accelerometer
Vehicle
Control Unit
Sensors
Preprocessing
Planning
Excecution
Master Thesis
Problem Statement
5
How can heterogeneous sensor inputs with different real-time properties be combined in a SLAM process component with deterministic behavior and improved precision?
Time Complexity
6
$$\mathcal{O}(1)$$
Localization:
feasible using a Kalman filter and deterministic resource reclamation
$$\mathcal{O}(1)$$
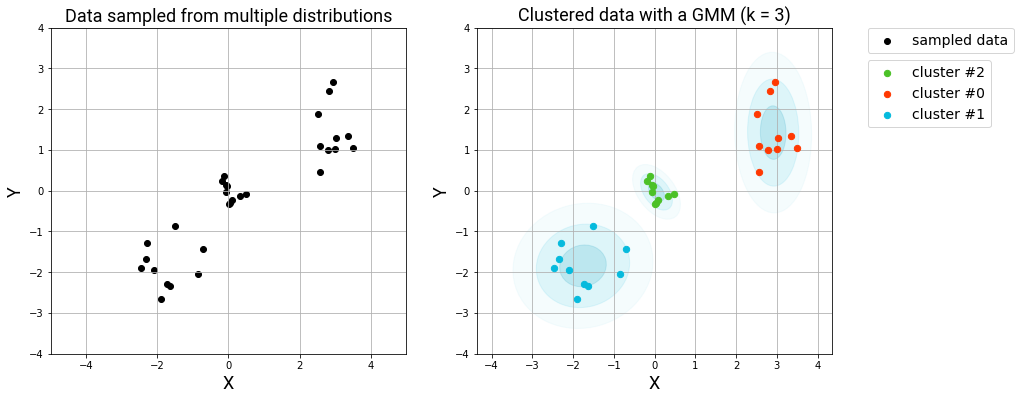
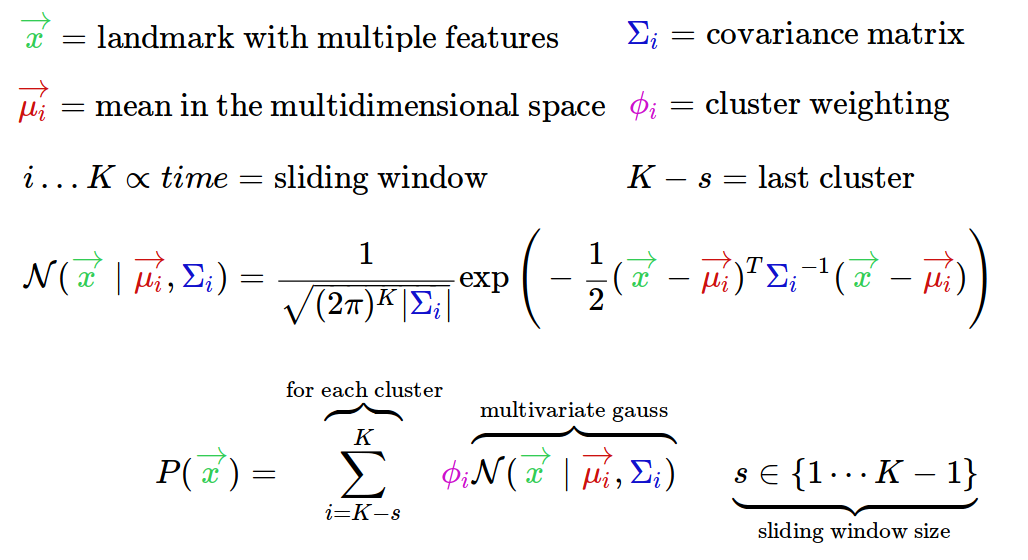
Mapping:
feasible within regulatory contraints using a Gaussian Mixture Model
Methodology
7
$$\mathcal{O}(1)$$
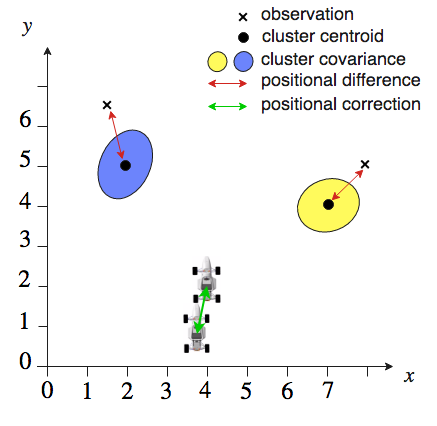
Backup #1: Data Assocation
8
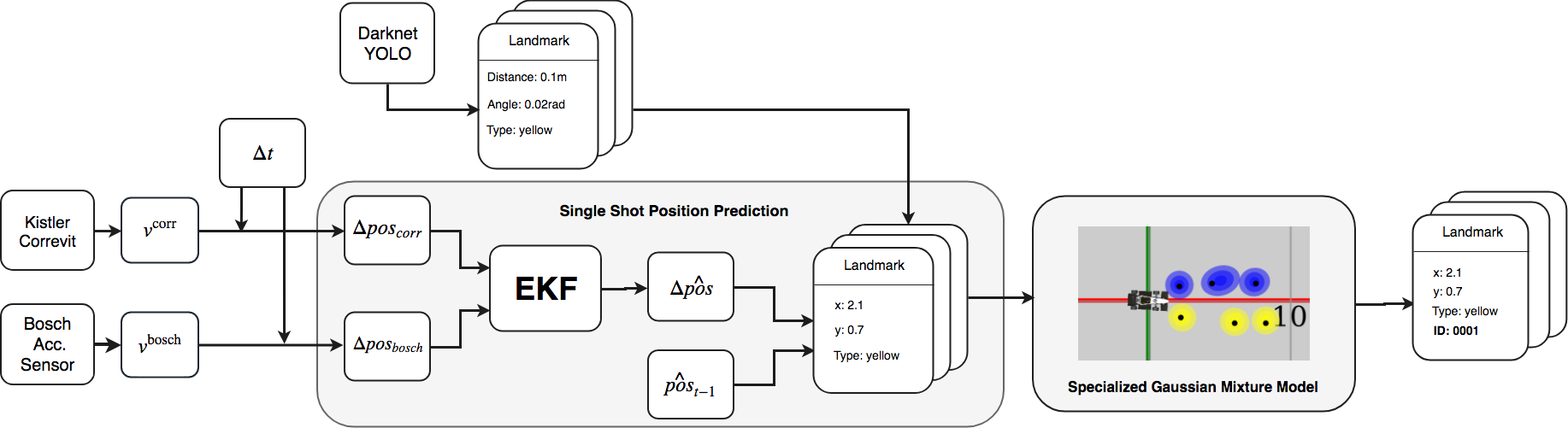
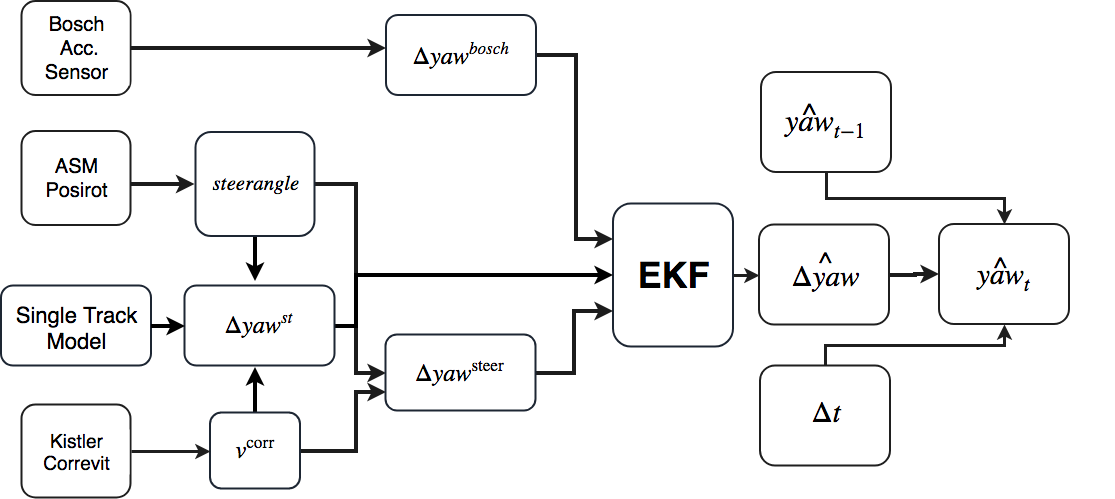
Backup #2: Improved Localization
9
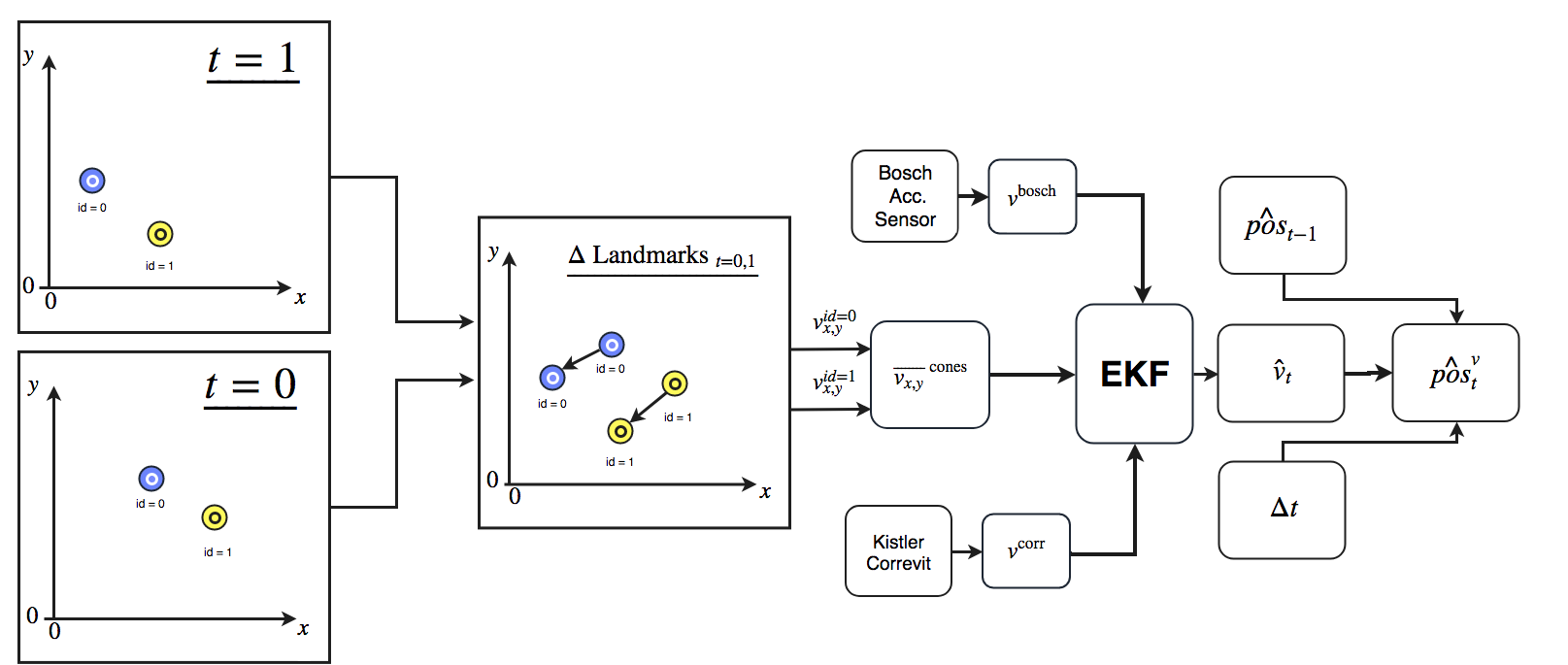
Backup #3: Visual Odometry
10
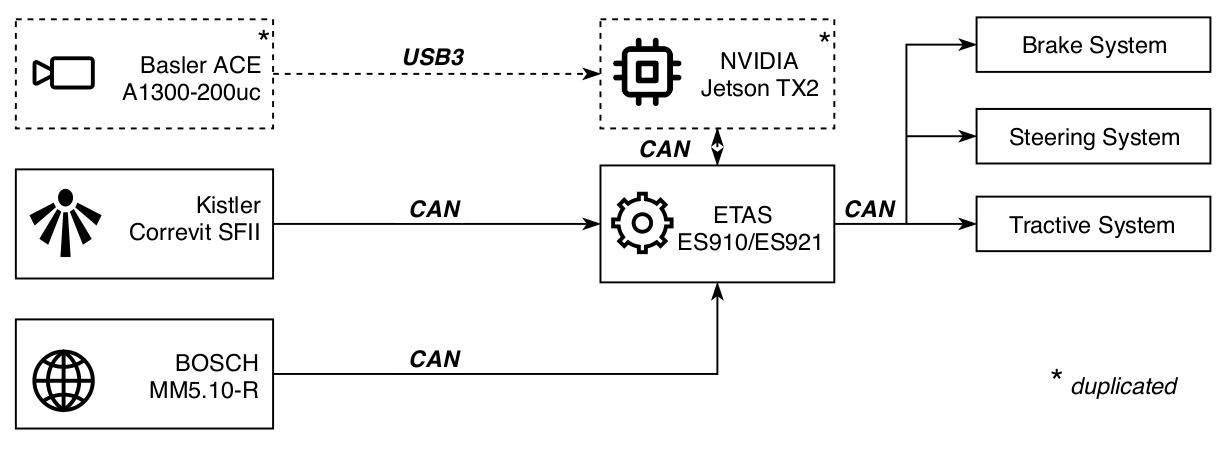
Backup #4: Hardware Overview
11
hard realtime
soft realtime
Backup #5: Cars Overview
12
FSAustria
2017
Business Plan
FSAustria
2017
Acceleration
FSGermany
2017
Gesamt
#3
#1
#1
FSItaly
2018
FSGermany
2018
Acceleration
FSGermany
2018
Gesamt
#5
#2
#2
Gesamt
Acceleration 0-100km/h: 2.1s
By cirquit
Antrittsvortrag




