

Steven De Keninck PRO
Mathematical Experimentalist
Graphics Applications of Geometric Algebra
Steven De Keninck
Graphics Applications of Geometric Algebra
Steven De Keninck
The idea of Geometric Algebra in just 30 minutes.
+
+
scalar
vector
bivector
Graphics Applications of Geometric Algebra
Steven De Keninck
The idea of Geometric Algebra in just 30 mins.
+
+
scalar
vector
bivector
Graphics Applications of Geometric Algebra
Steven De Keninck
The idea of Geometric Algebra in just 30 mins.
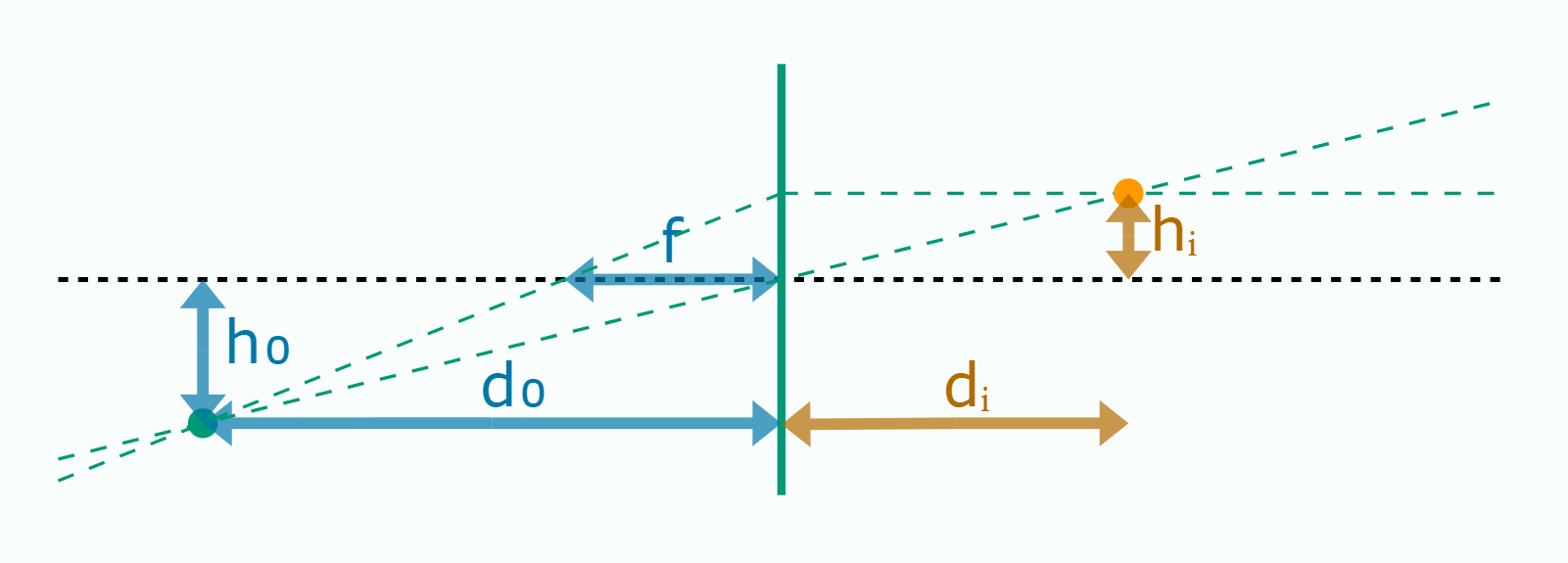
A simple example ..
\(d_i = \big ( \frac 1 f - \frac 1 {d_0} \big )^{-1}\qquad h_i=-\frac {d_i} {d_0} h_0\)
Graphics Applications of Geometric Algebra
Steven De Keninck
The idea of Geometric Algebra in just 30 mins.
\(d_i = \big ( \frac 1 f - \frac 1 {d_0} \big )^{-1}\qquad h_i=-\frac {d_i} {d_0} h_0\)
The paraxial approximation of the thin lens equation
Graphics Applications of Geometric Algebra
Steven De Keninck
\(d_i = \big ( \frac 1 f - \frac 1 {d_0} \big )^{-1}\qquad h_i=-\frac {d_i} {d_0} h_0\)
The paraxial approximation of the thin lens equation
\(\vec a = \overline {\vec c - \vec f}\)
\(\vec b= \vec c - \vec p\)
\(d_0 = \vec a \cdot \vec b\)
Graphics Applications of Geometric Algebra
Steven De Keninck
\(d_i = \big ( \frac 1 f - \frac 1 {d_0} \big )^{-1}\qquad h_i=-\frac {d_i} {d_0} h_0\)
The paraxial approximation of the thin lens equation
\((\overline {\vec c - \vec f}) \, \cdot\)
\((\vec c - \vec p)\)
\(d_0 = \)
\(h_0 = (\overline{\vec c - \vec g} )\,\cdot\,(\vec c - \vec p) \)
Graphics Applications of Geometric Algebra
Steven De Keninck
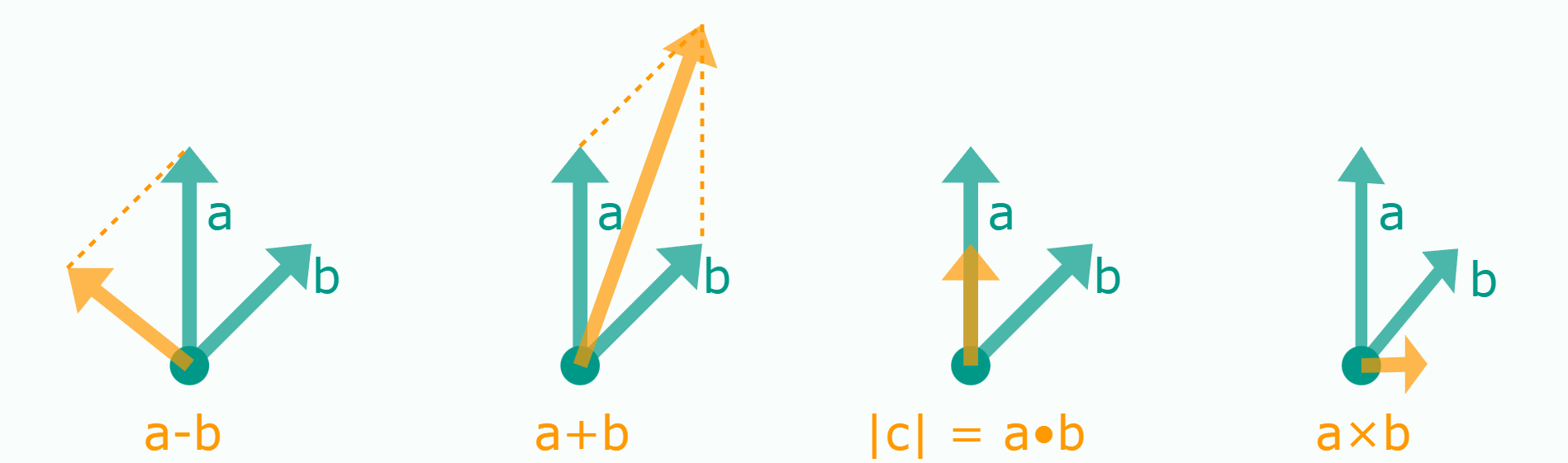
The Geometry of Arrows and its Algebra.
Given the green arrows, all operations are well defined.
Graphics Applications of Geometric Algebra
Steven De Keninck
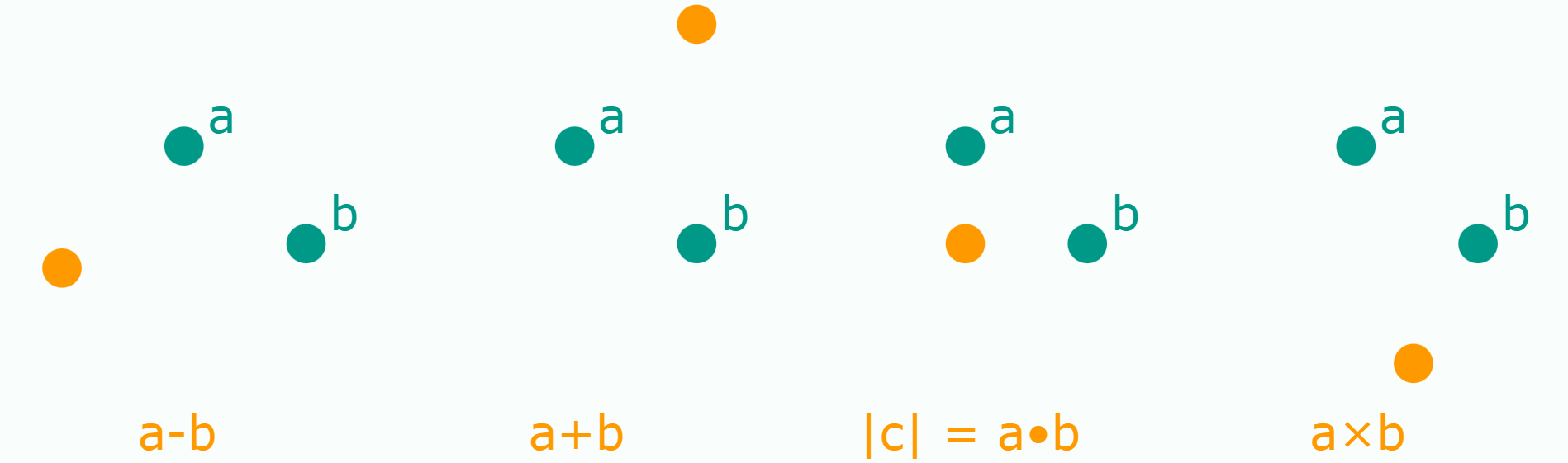
The Geometry of Arrows and its Algebra.
Given the green arrows, all operations are well defined.
Given the green points, no operation makes geometric sense.
Euclid's first postulate : two points determine a single line.
(and nothing else!)
Graphics Applications of Geometric Algebra
Steven De Keninck
The Geometry of Arrows and its Algebra.
For any operation \(\circ\) between two points to be geometric, its result must be in the 1D line they span!
(that's addition, subtraction, all products ...)
Graphics Applications of Geometric Algebra
Steven De Keninck
The Geometry of Arrows and its Algebra.
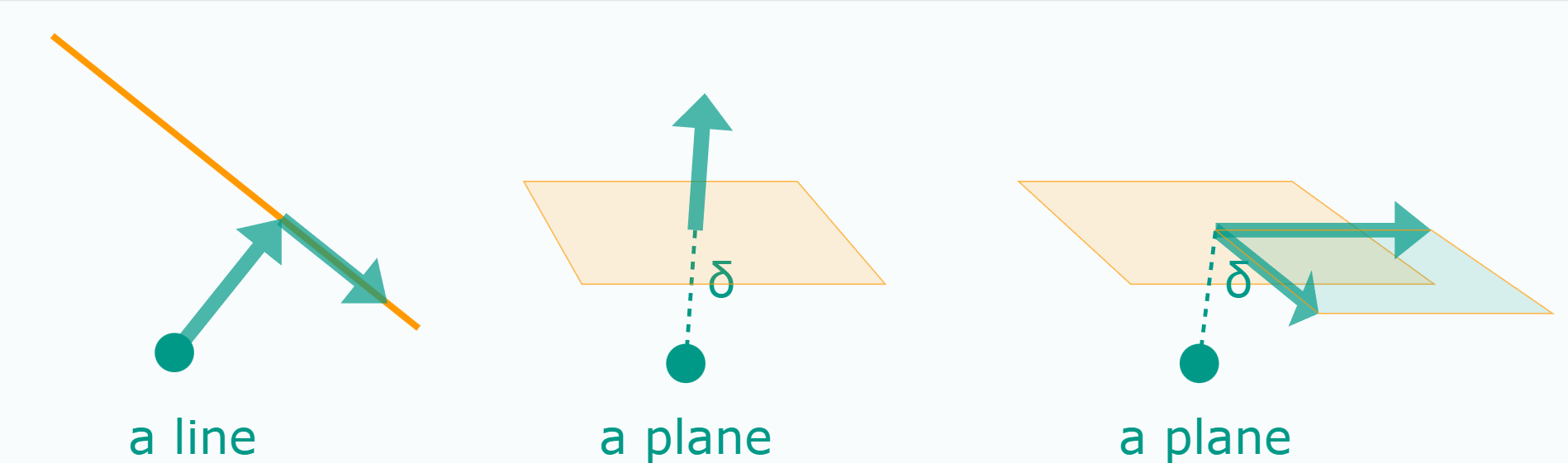
Lines and Planes are even more problematic, and can not trivially be mapped to arrows or multi-arrows.
Graphics Applications of Geometric Algebra
Steven De Keninck
The Geometry of Arrows and its Algebra.
How can we improve this?
Graphics Applications of Geometric Algebra
Steven De Keninck
Homogeneous/Projective Coordinates
Graphics Applications of Geometric Algebra
Steven De Keninck
For the geometry of points, lines, planes ..
Instead of an algebra of arrows,
we use an algebra of reflections.
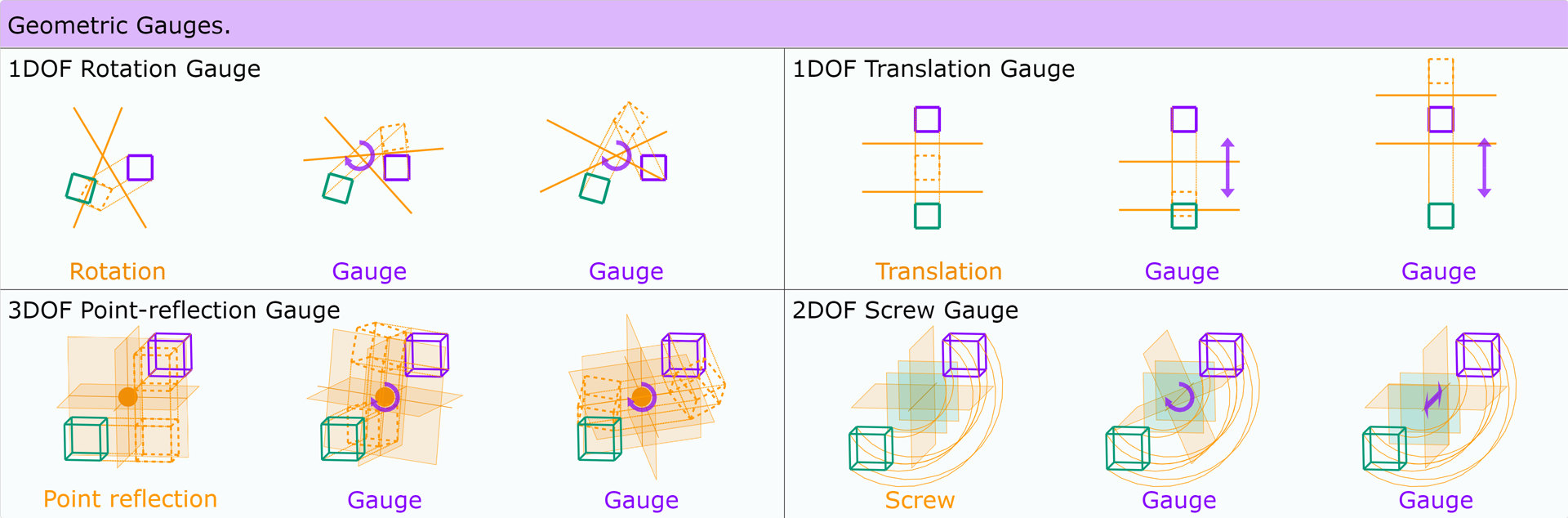
k-reflections
Geometric Gauges
Graphics Applications of Geometric Algebra
Steven De Keninck
k-reflections
Geometric Gauges
Elements = Transformations = k-Reflections
Graphics Applications of Geometric Algebra
Steven De Keninck
k-reflections
Geometric Gauges
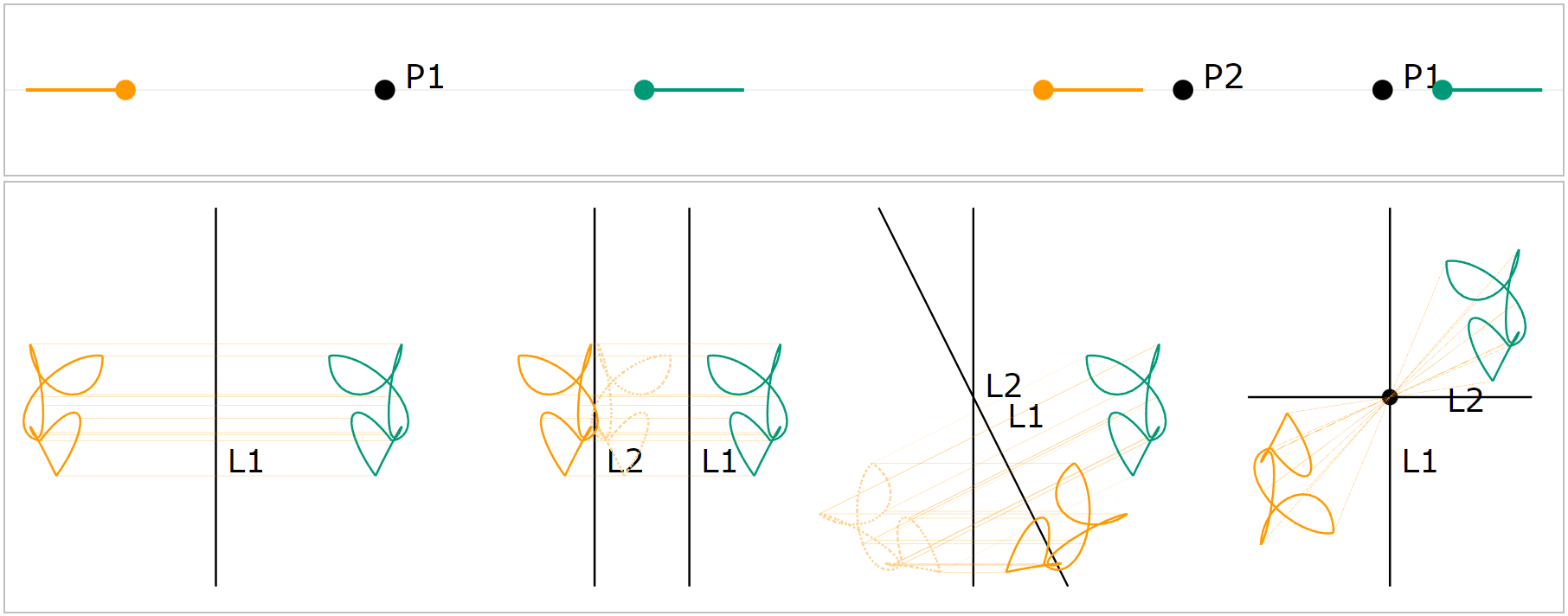
Each k-reflection (with k>1) can be gauged without changing the result.
Graphics Applications of Geometric Algebra
Steven De Keninck
k-reflections
Geometric Gauges
Each k-reflection (with k>1) can be gauged without changing the result.
Graphics Applications of Geometric Algebra
Steven De Keninck
Gauges tell us how reflections combine!
Cartan-Dieudonné
Every orthogonal transformation in an n-dimensional embedding space
is composed from at most n reflections
Graphics Applications of Geometric Algebra
Steven De Keninck
This flavor of GA is called PGA.
Graphics Applications of Geometric Algebra
Steven De Keninck
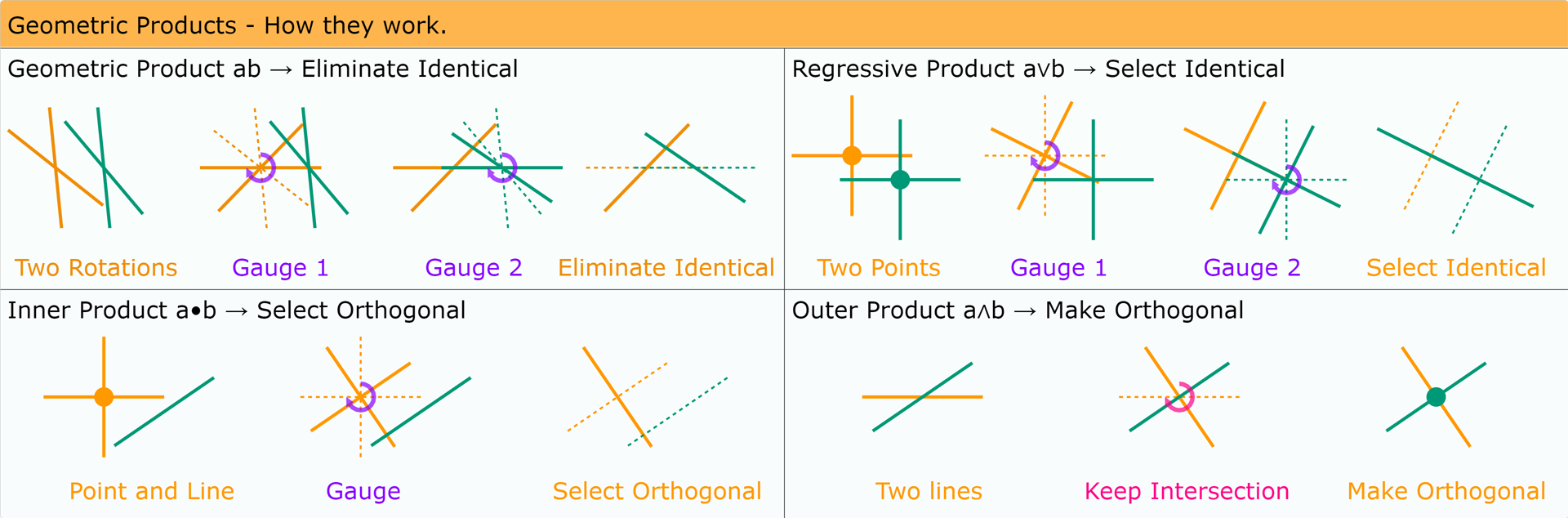
\(ab\) Geometric Product composes reflections
\(a\wedge b\) Outer Product Intersects elements
\(a\vee b\) Regressive Product joins elements
\(a\cdot b\) Dot Product rejects elements
Graphics Applications of Geometric Algebra
Steven De Keninck
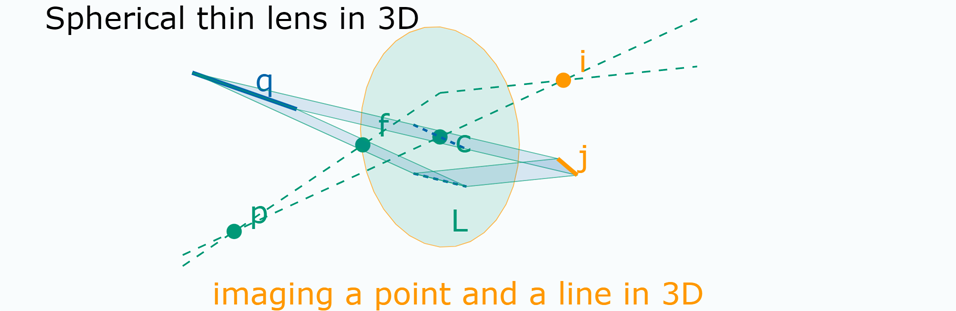
Formula can be read left to right, no information is hidden, no scalar ratios or coefficient calculations needed.
Graphics Applications of Geometric Algebra
Steven De Keninck
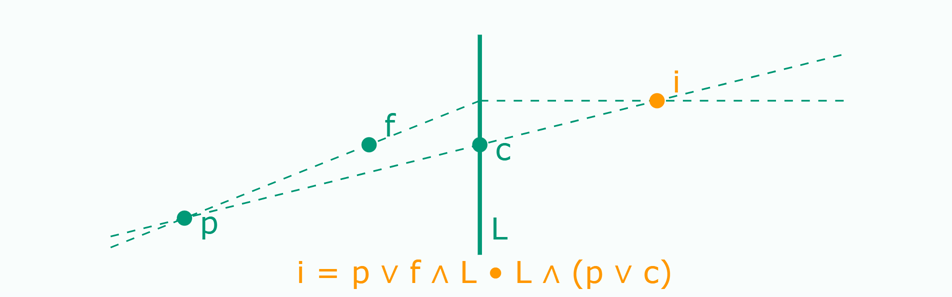
\(\vee\) = join \(\wedge\) = meet \(\bullet\) = dot
Graphics Applications of Geometric Algebra
Steven De Keninck
Graphics Applications of Geometric Algebra
Steven De Keninck
Graphics Applications of Geometric Algebra
Steven De Keninck
\(d_i = \big ( \frac 1 f - \frac 1 {d_0} \big )^{-1}\qquad h_i=-\frac {d_i} {d_0} h_0\)
\(h_0 = (\overline{\vec c - \vec g} )\,\cdot\,(\vec c - \vec p) \)
\(d_0 = (\overline{\vec c - \vec f} )\,\cdot\,(\vec c - \vec p) \)
\(i = -d_i\overline{(\vec c - \vec f )} - h_i \overline{(\vec c - \vec g)} + \vec c \)
no need for :
Graphics Applications of Geometric Algebra
Steven De Keninck
Graphics Applications of Geometric Algebra
Steven De Keninck
Thank you!
For more information, libs, tools and docs ...
https://bivector.net
By Steven De Keninck
Keynote talk at ENGAGE / CGI2022




