




federica bianco PRO
astro | data science | data for good
motion in a plane
Instructor: Dr. Bianco
TAs: Joey Betz; Lily Padlow
University of Delaware - Spring 2021
Now that we are familiar with vectors, and equations of motion in 1D we can put them together and move in a 3D world (tho we will start with 2D)
H&R CH4 motion in 2D and 3D
There are no new concepts in this chapter: only application of established concepts in combination
So if something is not clear, go back to chapter 1, 2, and 3
H&R CH4 motion in 2D and 3D
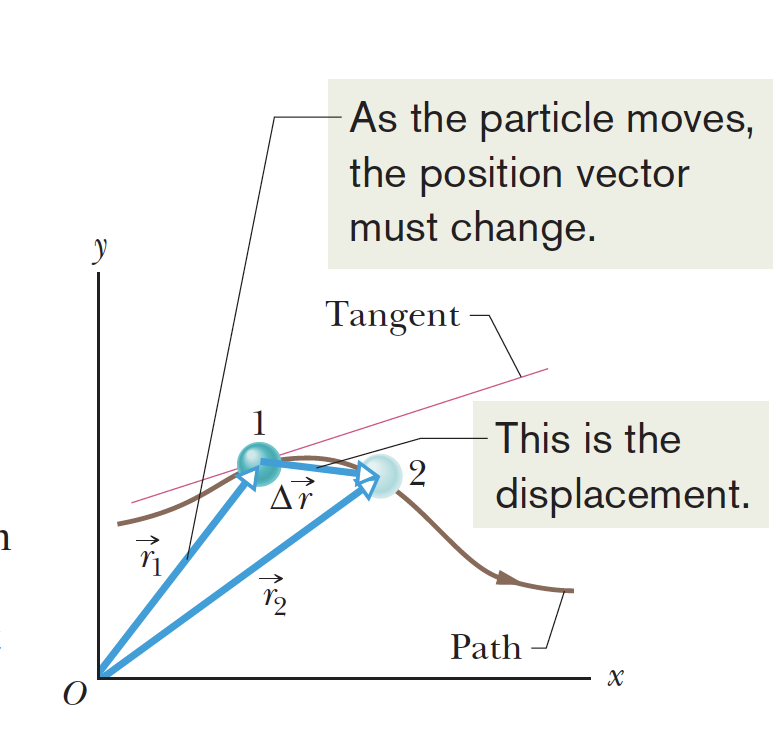
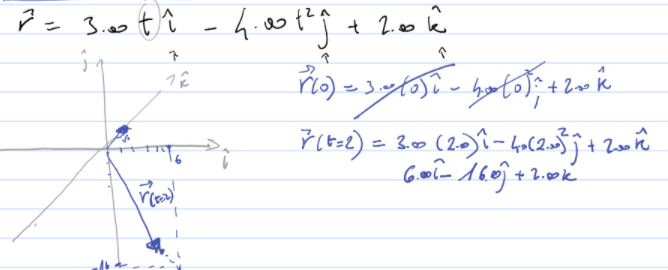
Each position (at time t) can be described by a vector.
1) choose/identify the frame of reference (coordinates+origin)
2) a vector r starts at the origin and ends a the position
x
y
H&R CH4 motion in 2D and 3D
Each position (at time t) can be described by a vector.
1) choose/identify the frame of reference (coordinates+origin)
2) a vector r starts at the origin and ends a the position
x
y
H&R CH4 motion in 2D and 3D
Each position (at time t) can be described by a vector.
1) choose/identify the frame of reference (coordinates+origin)
2) a vector r starts at the origin and ends a the position
x
y
H&R CH4 motion in 2D and 3D
Each position (at time t) can be described by a vector.
1) choose/identify the frame of reference (coordinates+origin)
2) a vector r starts at the origin and ends a the position
x
y
H&R CH4 motion in 2D and 3D
Each position (at time t) can be described by a vector.
1) choose/identify the frame of reference (coordinates+origin)
2) a vector r starts at the origin and ends a the position
x
y
H&R CH4 motion in 2D and 3D
Each position (at time t) can be described by a vector.
1) choose/identify the frame of reference (coordinates+origin)
2) a vector r starts at the origin and ends a the position
x
y
H&R CH4 motion in 2D and 3D
Each position (at time t) can be described by a vector.
1) choose/identify the frame of reference (coordinates+origin)
2) a vector r starts at the origin and ends a the position
H&R CH4 motion in 2D and 3D
Each position (at time t) can be described by a vector.
1) choose/identify the frame of reference (coordinates+origin)
2) a vector r starts at the origin and ends a the position
x
y
z
H&R CH4 motion in 2D and 3D
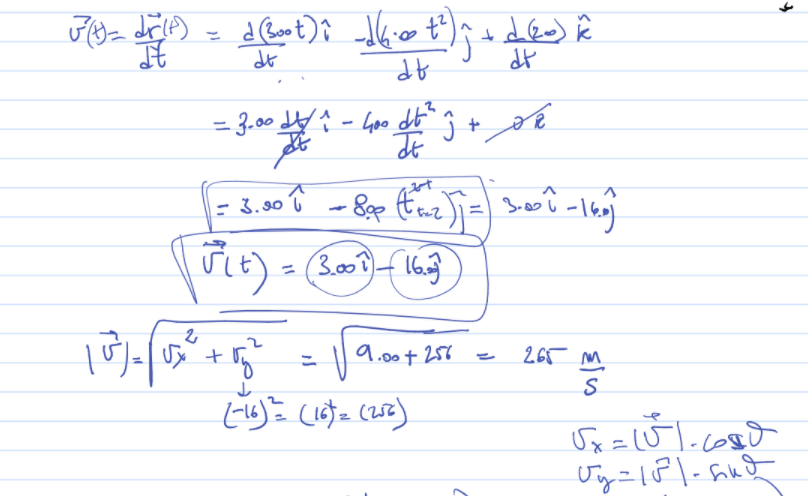
The velocity vector as well can be measured along each component
H&R CH4 motion in 2D and 3D
The velocity vector as well can be measured along each component
H&R CH4 motion in 2D and 3D
The velocity vector as well can be measured along each component
H&R CH4 motion in 2D and 3D
The velocity vector as well can be measured along each component
H&R CH4 motion in 2D and 3D
The velocity vector as well can be measured along each component
H&R CH4 motion in 2D and 3D
The velocity vector as well can be measured along each component
H&R CH4 motion in 2D and 3D
The velocity vector as well can be measured along each component
MATH REVIEW:
derivatives
MATH REVIEW:
derivatives
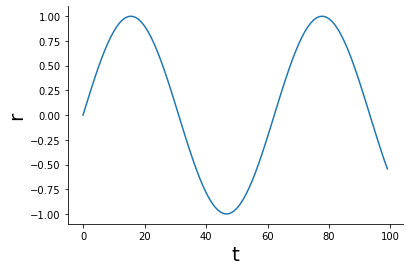
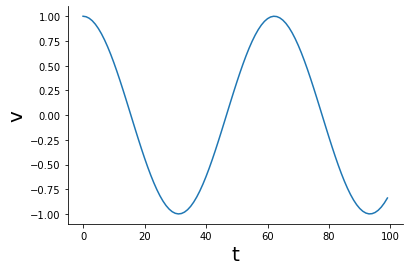
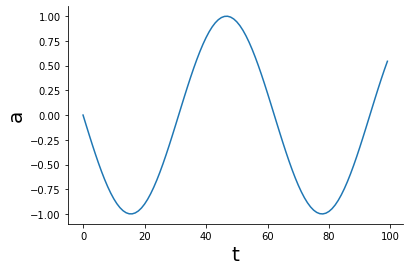
-> slope
if you need a review, this is pretty good! https://www.khanacademy.org/math/ap-calculus-ab/ab-differentiation-1-new/ab-2-1/v/derivative-as-a-concept
t
r
MATH REVIEW:
derivatives
-> slope
if you need a review, this is pretty good! https://www.khanacademy.org/math/ap-calculus-ab/ab-differentiation-1-new/ab-2-1/v/derivative-as-a-concept
x
y
MATH REVIEW:
derivatives
-> slope of tangent
if you need a review, this is pretty good! https://www.khanacademy.org/math/ap-calculus-ab/ab-differentiation-1-new/ab-2-1/v/derivative-as-a-concept
tangent
x
y
MATH REVIEW:
derivatives
if you need a review, this is pretty good! https://www.khanacademy.org/math/ap-calculus-ab/ab-differentiation-1-new/ab-2-1/v/derivative-as-a-concept
tangent
-> slope of tangent
x
y
MATH REVIEW:
derivatives
if you need a review, this is pretty good! https://www.khanacademy.org/math/ap-calculus-ab/ab-differentiation-1-new/ab-2-1/v/derivative-as-a-concept
tangent
-> slope of tangent
x
y
MATH REVIEW:
derivatives
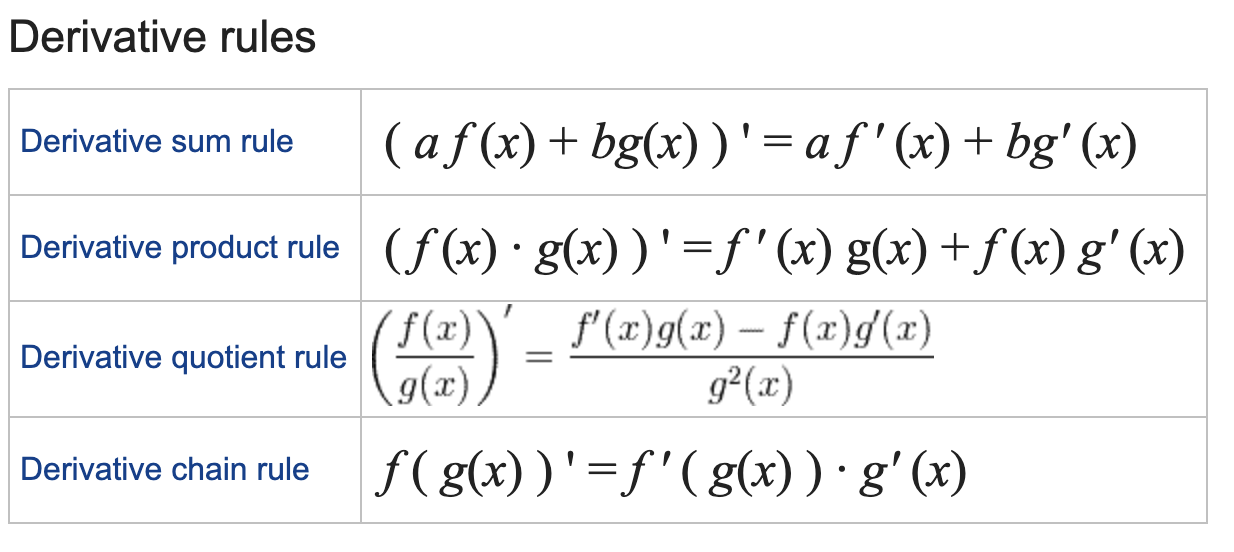
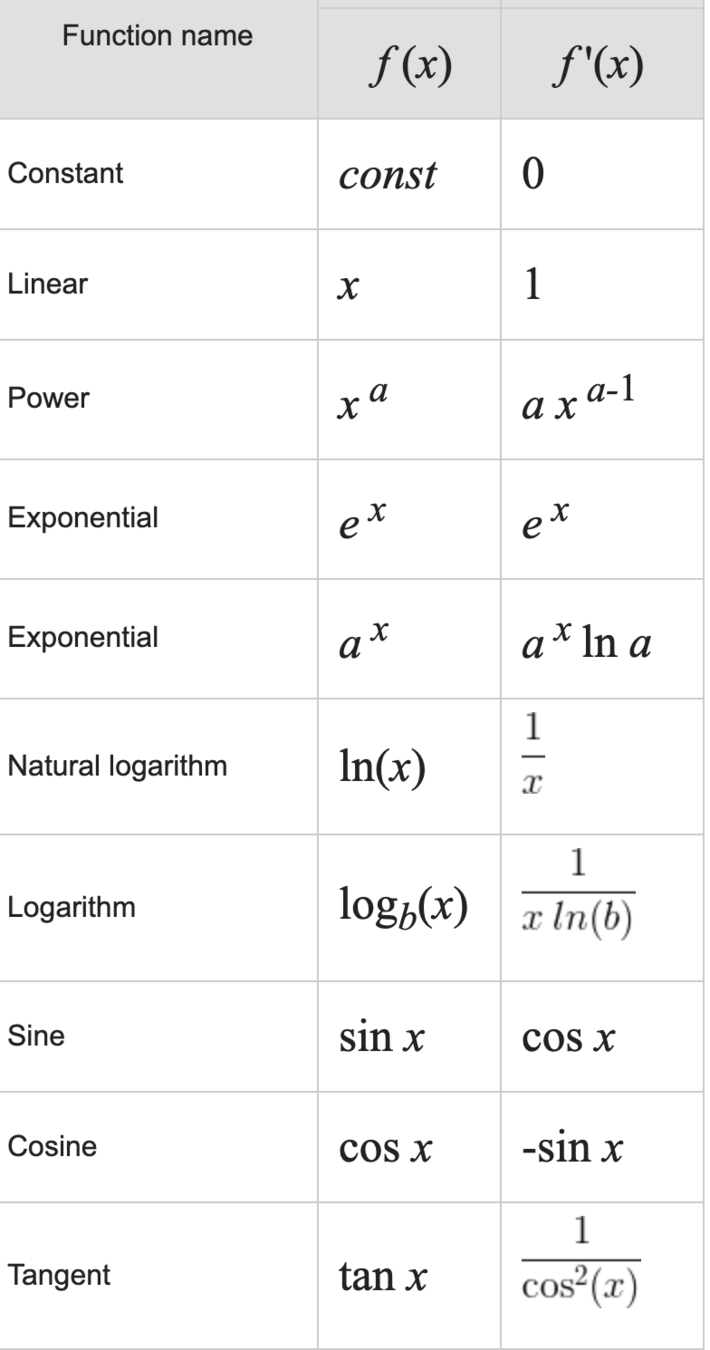
derivative math rules https://www.rapidtables.com/math/calculus/derivative.html
MATH REVIEW:
derivatives
derivative math rules https://www.rapidtables.com/math/calculus/derivative.html
MATH REVIEW:
derivatives
derivative math rules https://www.rapidtables.com/math/calculus/derivative.html
MATH REVIEW:
derivatives
derivative math rules https://www.rapidtables.com/math/calculus/derivative.html
MATH REVIEW:
derivatives
derivative math rules https://www.rapidtables.com/math/calculus/derivative.html
MATH REVIEW:
derivatives
derivative math rules https://www.rapidtables.com/math/calculus/derivative.html
MATH REVIEW:
derivatives
derivative math rules https://www.rapidtables.com/math/calculus/derivative.html
{
MATH REVIEW:
derivatives
derivative math rules https://www.rapidtables.com/math/calculus/derivative.html
{
H&R CH4 motion in 2D and 3D
2
6
x
y
z
-16
H&R CH4 motion in 2D and 3D
I can already tell:
- the x components is linear in time: =>constant velocity along the x axis
- the y component has a factor t^2: =>accelerated motion along the y axis
- the z components has no factors of t: =>there is no motion along the z axis
2
6
x
y
z
-16
x
H&R CH4 motion in 2D and 3D
2
6
x
y
z
-16
x
y
H&R CH4 motion in 2D and 3D
math relations and derivatives
2
6
x
y
z
-16
x
z
H&R CH4 motion in 2D and 3D
-16
geometric relations and trig
2
6
x
y
z
-16
KEY POINTS:
motion in 2D and 3D
H&R CH4 motion in 2D and 3D
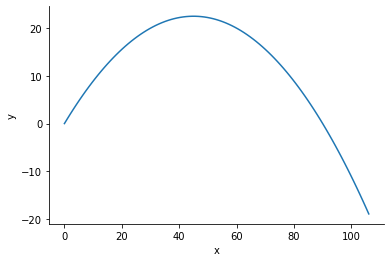
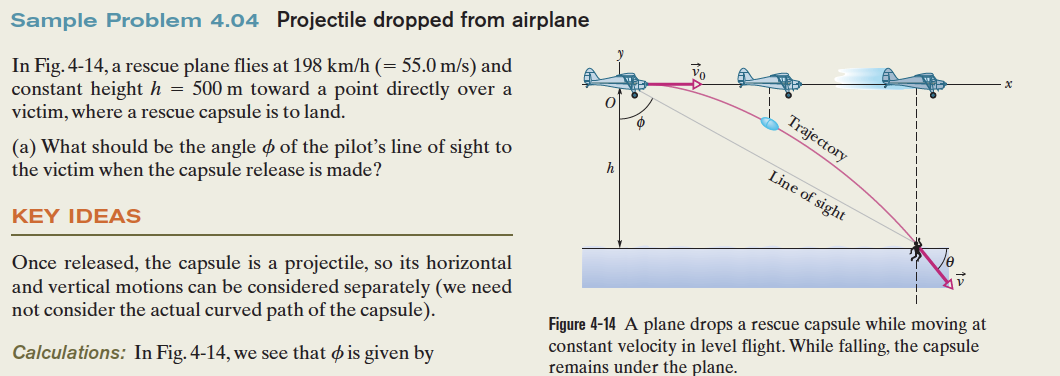
Projectile motion
r
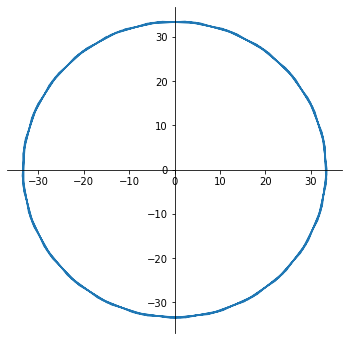
Uniform cirular motion
Projectile motion
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
Projectile motion
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
Projectile motion
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
Projectile motion
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
Think about this the same way we thought of free-fall motion in Chap2: it is just regular motion, for which I have some extra info: that v is constant and a is only on the y axis a=g
- constant motion along x
- accelerate (downward) motion along y
H&R CH4 motion in 2D and 3D
Projectile motion
Toni Stone (July 17, 1921 – November 2, 1996) was the first woman to play as a regular on an American big-league professional baseball team
they
range motion tells me the distance traveled horizontally
**if the motion starts and ends at y=0**
R
(note: use the trig identity )
H&R CH4 motion in 2D and 3D
R
H&R CH4 motion in 2D and 3D
when =>
}
math:
because v changes direction => changes sign => has to go through 0
physics:
R
H&R CH4 motion in 2D and 3D
I recommend you try solving problems like this one, where the initial motion has no upward velocity - these problems tend to be more confusing perhaps
KEY POINTS:
H&R CH4 motion in 2D and 3D
parabolic motion
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
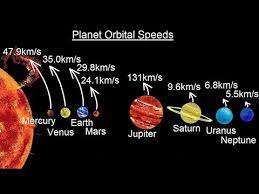
SPEED DOES NOT CHANGE - VELOCITY CHANGES!
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
T period - how long it takes to go around once [T] (sec)
F frequency - how many revolutions per unit time [1/T] (1/sec or Hz)
F = 1/T
SPEED DOES NOT CHANGE - VELOCITY CHANGES!
}
H&R CH4 motion in 2D and 3D
r
T period - how long it takes to go around once [T] (sec)
F frequency - how many revolutions per unit time [1/T] (1/sec or Hz)
F = 1/T
angular velocity: rate of change of the angle : [angle/T] (randians / s)
vc = circumference / period = [L/T] (m/s)
}
}
Uniform cirular motion
SPEED DOES NOT CHANGE - VELOCITY CHANGES!
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
SPEED DOES NOT CHANGE - VELOCITY CHANGES!
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
SPEED DOES NOT CHANGE - VELOCITY CHANGES!
simple harmonic motion
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
SPEED DOES NOT CHANGE - VELOCITY CHANGES!
acceleration:
angular velocity: rate of change of the angle : [angle/T] (randians / s)
vc = circumference / period = [L/T] (m/s)
}
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
SPEED DOES NOT CHANGE - VELOCITY CHANGES!
what is the relationship between a and the radius?
acceleration:
}
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
angular velocity: rate of change of the angle: [angle/T] (randians / s)
v = circumference / period = [L/T] (m/s)
SPEED DOES NOT CHANGE - VELOCITY CHANGES!
LOOK AT THE DERIVATION OF a FROM v IN THE BOOK!
r
H&R CH4 motion in 2D and 3D
acceleration:
}
r
r
90 deg angles:
angles:
r
Uniform cirular motion
r
r
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
at what x coordinate will the ball fall?
0
r/2
r
3r/2
-r/2
-r
-3r/2
-2r
2r
>2r
<-2r
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
0
r/2
r
3r/2
-r/2
-r
-3r/2
-2r
2r
>2r
<-2r
Q: Where on the x axis would a particle released from circular motion at the position indicated in the diagram to the right
A: The velocity vector v at the position of release is perpendicular to the position vector r . Thus after release this problem becomes a projectile motion problem with
Since there is no x displacement and the x position is x=r for the entire motion
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
1. A centripetal acceleration pointing toward the center of the circular orbit keeps the body moving at constant speed
acceleration:
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
1. A centripetal acceleration pointing toward the center of the circular orbit keeps the body moving at constant speed
acceleration:
2. By Newton's II law: F = ma if there is an acceleration there is a force!
Force:
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
1. A centripetal acceleration pointing toward the center of the circular orbit keeps the body moving at constant speed
acceleration:
2. By Newton's II law: F = ma if there is an acceleration there is a force!
Force:
H&R CH4 motion in 2D and 3D
r
Uniform cirular motion
1. A centripetal acceleration pointing toward the center of the circular orbit keeps the body moving at constant speed
acceleration:
2. By Newton's II law: F = ma if there is an acceleration there is a force!
Force:
r
KEY POINTS:
H&R CH4 motion in 2D and 3D
uniform circular motion
KEY POINTS:
H&R CH4 motion in 2D and 3D
relative motion
MATH REVIEW:
integrals
MATH REVIEW:
integrals
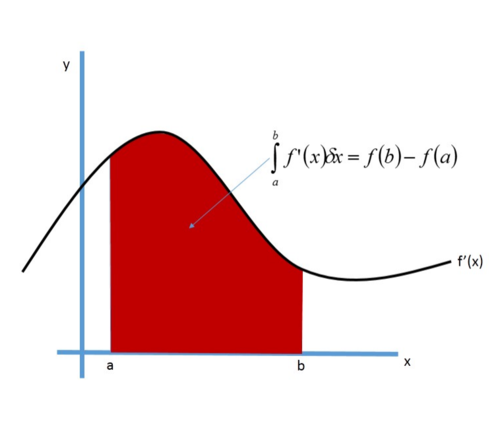
based on the rules we learned for derivatives we can figure out what the value of the integral is for specific functions
MATH REVIEW:
integrals
based on the rules we learned for derivatives we can figure out what the value of the integral is for specific functions
MATH REVIEW:
integrals
based on the rules we learned for derivatives we can figure out what the value of the integral is for specific functions
MATH REVIEW:
integrals
MATH REVIEW:
integrals
based on the rules we learned for derivatives we can figure out what the value of the integral is for specific functions
MATH REVIEW:
integrals
MATH REVIEW:
integrals
based on the rules we learned for derivatives we can figure out what the value of the integral is for specific functions
By federica bianco
vectors, vector math, trigonometry



