Computação Numérica
2014.4
Professor: Filipe Taveiros
Turma de reposição
As turmas de reposição são turmas destinadas exclusivamente aos alunos que reprovaram com média igual ou superior a 3,0 e que cumpriram os critérios de assiduidade em uma dada disciplina obrigatória da matriz curricular em um dos dois últimos semestres.
Nestas turmas, a critério do professor, a assiduidade pode não ser exigida, e metodologias de ensino e de avaliação não presenciais — que levem em conta que os alunos já assistiram as aulas nas turmas regulares — podem ser adotadas.
Período
Aulas: 05/01/2015
Horário: Terças e Quintas às 14:00 (Aula)
Segunda às 13:00 (Prova)
Local: Laboratório 3
Metodologia
- Abordagem prática com foco em exercícios teóricos e práticos
- Sem deduções e provas
- Simulações interativas
- Análise dos métodos numéricos em três aspectos:
O que é?
Formulação matemática?
Como se aplica?
Assuntos abordados
- Expansão em série de Taylor
- Resolução de equações
- Método da bisseção
- Método de Newton
- Método da secante
- Sistemas lineares
- Pivotação de Gauss
- Decomposição LU
- Gauss-Seidel
- Jacobi
- Ajuste de curvas e interpolação
- MMQ
- Lagrange
- Newton
- Integração numérica
- Trapézio simples e composto
- Regras de Simpson
- Resolução de EDOs
- Newton
- Runge-Kutta
Avaliação
- Listas de exercícios:
Uma por aula. Cada lista vale 0,5 ponto para a prova referente ao conteúdo da semana.
- Atividade de laboratório:
Será dada uma atividade de laboratório envolvendo todo o conteúdo.
- Provas:
Haverá uma prova referente aos assuntos abordados em cada semana. Esta prova ocorrerá na segunda-feira da semana subsequente.
Em todas as atividades poderá ser usado o Scilab para auxílio dos cálculos.
Avaliação
N=\frac{(P_1+L_{11}+L_{12})+(P_2+L_{21}+L_{22})+(P_3+L_{31}+L_{32})+AL}{4}
N=4(P1+L11+L12)+(P2+L21+L22)+(P3+L31+L32)+AL
A nota da disciplina será dada por:
Calendário
Semana 1:
Série de Taylor
Solução de equações transcendentais
Semana 2:
Prova 1
Sistemas lineares
Ajuste de curvas e interpolação
Semana 3:
Prova 2
Integração
Solução de EDOs
Semana 4:
Prova 3 e Atividade de Laboratório
Computação Numérica
O que é?
Para que serve?
Como aplicar?
PROCESSOS FÍSICOS:
MECÂNICOS, ELÉTRICOS, QUÍMICOS, TÉRMICOS
ENERGIA:
MECÂNICA, ELÉTRICA, QUÍMICA, MAGNÉTICA, RADIANTE, GRAVITACIONAL, NUCLEAR
MODELAR
MODELAR
COMPREENDER
MODELAR
COMPREENDER
CONTROLAR
MODELAR, COMPREENDER E CONTROLAR:
Como?
Ferramentas matemáticas
f(x) = Cos(x)
f(x)=Cos(x)
\displaystyle\int{f(x)} = Sin(x) + C
∫f(x)=Sin(x)+C
g(x) = \ln(x)
g(x)=ln(x)
\displaystyle\frac{d}{dx}g(x)\text{ }=\text{ }\displaystyle\frac{1}{x}
dxdg(x) = x1
f(x)\text{ e }g(x)\text{?}
f(x) e g(x)?
\displaystyle\int\text{ e }\frac{d}{dx}\text{?}
∫ e dxd?
Ferramentas matemáticas
\displaystyle\int_{-\infty}^{\infty}f(t)e^{-j\omega t}dt \text{ ?}
∫−∞∞f(t)e−jωtdt ?
\displaystyle\int_{-\infty}^{\infty}f(t)e^{-s t}dt \text{ ?}
∫−∞∞f(t)e−stdt ?
Ferramentas matemáticas
\displaystyle e^{j\pi}+1=0
ejπ+1=0
MODELAR E COMPREENDER:
CÁLCULO ANALÍTICO
QUERO USAR UM MOTOR ELÉTRICO PARA TRACIONAR UM CABO DE AÇO LIGADO À UMA CAIXA METÁLICA QUE IRÁ ME TRANSPORTAR DO TÉRREO ATÉ O CENTÉSIMO ANDAR EM POUCOS MINUTOS, E ABRIRÁ A PORTA EXATAMENTE NUM ESPAÇO DESTINADO PARA QUE EU POSSA SAIR DA CAIXA E ENTRAR NO ANDAR CORRETO EM SEGURANÇA!
QUEM VAI CONTROLAR? COMO ESSE DISPOSITIVO REALIZARÁ OS CÁLCULOS NECESSÁRIOS?
Expansão em série de Taylor
O que é?
A Série de Taylor prevê o valor da função em um ponto em termos do valor da função e suas derivadas em outro ponto.
Formulação matemática?
f(x)=\displaystyle\sum_{n=0}^\infty a_n(x-x_0)^n
f(x)=n=0∑∞an(x−x0)n
Onde:
x \rightarrow
x→
abscissa em que se deseja obter a aproximação
a_n = \frac{f^{(n)}(x_0)}{n!}
an=n!f(n)(x0)
x_0 \rightarrow
x0→
ponto de expansão
Como se aplica?
- Simulação interativa (SIGAA)
- Exemplos e Lista de exercícios
- Método numérico
(sem derivação analítica)
Exemplos
Exemplo 1:
y = f(x)=\sqrt{x+1}\quad ; \quad x_0=0 \quad ; \quad n=3
y=f(x)=√x+1;x0=0;n=3
Exemplo 2:
y = f(x)= \text{ }\displaystyle \frac{1}{x+1}\quad ; \quad x_0=2 \quad ; \quad n=3
y=f(x)= x+11;x0=2;n=3
Lista de exercícios
Determine a expansão em série de Taylor com grau n para as funções dadas, centradas nos pontos especificados.
y = f(x)=\log{x}\quad ; \quad x_0=2 \quad ; \quad n=3
y=f(x)=logx;x0=2;n=3
a)
b)
c)
d)
y = f(x)= e^{-2x} ; \quad x_0=0 \quad ; \quad n=3
y=f(x)=e−2x;x0=0;n=3
y = f(x)= \sin{x} ; \quad x_0=\pi/3 \quad ; \quad n=3
y=f(x)=sinx;x0=π/3;n=3
y = f(x)= \frac{1}{2-x} ; \quad x_0=0 \quad ; \quad n
y=f(x)=2−x1;x0=0;n
arbitrário
Solução de equações transcendentais
Método da bisseção
Solução de equações transcendentais
O que é?
Algoritmo para solução de raízes quando uma solução analítica é impossível. Em outras palavras, determinar o x que satisfaça
f(x)=0.
f(x)=0.
O método da bisseção é o mais fácil de implementar dentre os métodos de solução de equações. Sua principal desvantagem é o tempo de convergência, que é maior comparado com os demais métodos.
DEMONSTRAÇÃO INTERATIVA! (SIGAA)
Formulação matemática
\text{Escolhe-se um intervalo } \{a,b\} \text{ tal que}
Escolhe-se um intervalo {a,b} tal que
f(a)f(b)<0 \quad\rightarrow \quad a < r < b
f(a)f(b)<0→a<r<b
x_{sn}=\text{ }\displaystyle\frac{a+b}{2}\quad\rightarrow
xsn= 2a+b→
Repete-se este processo até que a tolerância desejada seja atingida
Solução
numérica
Cálculo do erro na solução numérica
- Erro real
- Tolerância na solução
- Erro relativo
erro = |x_{sr}-x_{sn}|
erro=∣xsr−xsn∣
\epsilon=|f(x_{sr})-f(x_{sn})|=|0-f(x_{sn})|=|f(x_{sn})|
ϵ=∣f(xsr)−f(xsn)∣=∣0−f(xsn)∣=∣f(xsn)∣
f(x_{sn})
f(xsn)
\epsilon=\text{ }\displaystyle\left|\frac{x_{ns}[k]-x_{ns}[k-1]}{{x}_{ns}[k-1]}\right|
ϵ= ∣∣∣∣xns[k−1]xns[k]−xns[k−1]∣∣∣∣
Método de Newton
Solução de equações transcendentais
O que é?
Continuando com os métodos de soluções de equações, o método de Newton é o que apresenta convergência mais rápida. No entanto, requer o cálculo analítico da derivada de f(x).
Formulação matemática
Repete-se este processo até que a tolerância desejada seja atingida
x_{n+1}=x_n-\displaystyle\text{ }\frac{f(x_n)}{f'(x_n)}
xn+1=xn− f′(xn)f(xn)
Método da secante
Solução de equações transcendentais
O que é?
A equação que estamos tentando solucionar é transcendental. E se for impossível obter uma derivada analítica da função? É aí que entra o método da secante.
Formulação matemática
Utiliza-se esta aproximação numérica para a derivada no método de Newton e processo segue até que a raiz encontrada tenha a tolerância desejada.
f'(x_n)\approx\text{ }\displaystyle\frac{f(x_n)-f(x_{n-1})}{x_n-x_{n-1}}
f′(xn)≈ xn−xn−1f(xn)−f(xn−1)
Lista de exercícios
- Determine a raiz de usando:
a) o método da bisseção
b) o método de Newton
c) o método da secante
Estabeleça seu próprio critério de convergência, use o Scilab para gerar um gráfico e obter um intervalo que contenha uma raiz e comente sobre a eficiência e esforço computacional dos métodos
- Faça o mesmo para as seguintes funções:
f(x)=x-2e^{-x}
f(x)=x−2e−x
f(x)=x^3+0.6x^2+5.6x-4.8
f(x)=x3+0.6x2+5.6x−4.8
f(x)=\text{ }\displaystyle\frac{Sin(x)}{x}
f(x)= xSin(x)
Lista de exercícios
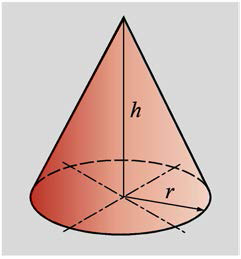
3. A área da superfície lateral de um cone é dada por
S=\pi r \sqrt{r^2+h^2}
S=πr√r2+h2
em que r é o raio da base do cone e h é a sua altura, conforme ilustrado na figura abaixo. Determine o raio de um cone cuja altura e área da superfície são
h=25\text{ }m\text{ e }S=1800\text{ }m^2
h=25 m e S=1800 m2
Solução de sistemas lineares
Solução de sistemas lineares
Sistemas de equações lineares que têm de ser resolvidas simultaneamente surgem em problemas que incluem várias (possivelmente muitas) variáveis que são dependentes umas das outras. Tais problemas ocorrem não somente em engenharia e ciência, mas em praticamente qualquer disciplina (estatística, economia, etc.).
Solução de sistemas lineares
Um sistema de duas (ou três) equações com duas (ou três) incógnitas pode ser resolvido por substituição manualmente ou outros métodos matemáticos. Porém, a resolução de um sistema deste modo é praticamente impossível quando o número de equações (e incógnitas) aumenta acima de três.
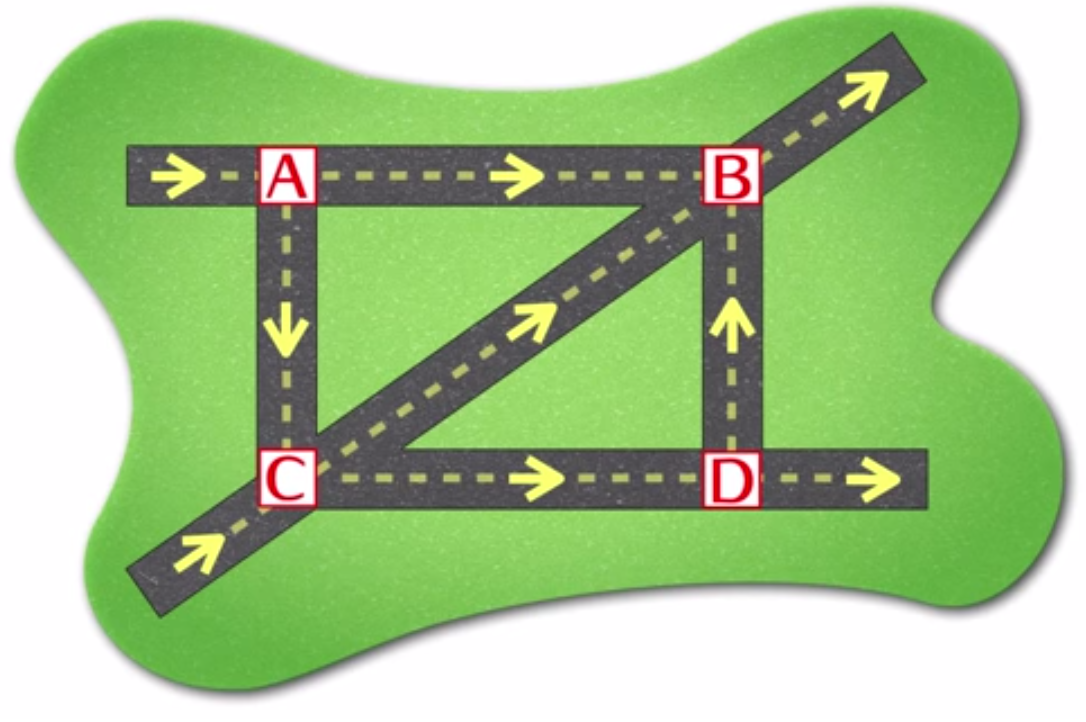
Engenharia de Tráfego
85 \text{ carros/h}
85 carros/h
70 \text{ carros/h}
70 carros/h
120 \text{ carros/h}
120 carros/h
45 \text{ carros/h}
45 carros/h
Engenharia de Tráfego
85 \text{ carros/h}
85 carros/h
70 \text{ carros/h}
70 carros/h
120 \text{ carros/h}
120 carros/h
45 \text{ carros/h}
45 carros/h
x_1
x1
x_2
x2
x_3
x3
x_4
x4
x_5
x5
Engenharia de Tráfego
85 \text{ carros/h}
85 carros/h
70 \text{ carros/h}
70 carros/h
120 \text{ carros/h}
120 carros/h
45 \text{ carros/h}
45 carros/h
x_1
x1
x_2
x2
x_3
x3
x_4
x4
x_5
x5
85+x_4=120+x_5
85+x4=120+x5
85=x_1+x_2
85=x1+x2
x_1+x_3+45=120
x1+x3+45=120
x_2+x_4=70+x_3
x2+x4=70+x3
70=45+x_5
70=45+x5
\text{ENTRADA }= \text{ SAIDA }
ENTRADA = SAIDA
Tipos de métodos
Diretos: Solução exata do sistema utilizando manipulações algébricas. Ex.: Eliminação de Gauss.
Iterativos: Uma solução ("chute") inicial é utilizado num processo retroativo para obtenção da solução.
Ex.: Método de Gauss-Seidel.
Representação Matricial
x_4-x_5=35
x4−x5=35
x_1+x_2=85
x1+x2=85
x_1+x_3=75
x1+x3=75
x_2-x_3+x_4=70
x2−x3+x4=70
x_5=25
x5=25
0x_1+0x_2+0x_3+1x_4-1x_5=35
0x1+0x2+0x3+1x4−1x5=35
1x_1+1x_2+0x_3+0x_4+0x_5=85
1x1+1x2+0x3+0x4+0x5=85
1x_1+0x_2+1x_3+0x_4+0x_5=75
1x1+0x2+1x3+0x4+0x5=75
0x_1+1x_2-1x_3+1x_4+0x_5=70
0x1+1x2−1x3+1x4+0x5=70
0x_1+0x_2+0x_3+0x_4+1x_5=25
0x1+0x2+0x3+0x4+1x5=25
Método de Gauss
Solução de sistemas
lineares
Método de Gauss
Início
Passo 1
Passo 2
Passo 3
Método de Gauss
Considerações:
- Se o elemento pivô for zero
- Se o elemento pivô for pequeno relativo aos demais termos
Método de
Gauss-Seidel
Solução de sistemas
lineares
Método de Gauss-Seidel
x_1=\frac{1}{a_{11}}(b_1-a_{12}x_2-a_{13}x_3-a_{14}x_4)
x1=a111(b1−a12x2−a13x3−a14x4)
x_2=\frac{1}{a_{22}}(b_2-a_{21}x_1-a_{23}x_3-a_{24}x_4)
x2=a221(b2−a21x1−a23x3−a24x4)
x_3=\frac{1}{a_{33}}(b_3-a_{31}x_1-a_{32}x_2-a_{34}x_4)
x3=a331(b3−a31x1−a32x2−a34x4)
x_4=\frac{1}{a_{44}}(b_4-a_{41}x_1-a_{42}x_2-a_{43}x_3)
x4=a441(b4−a41x1−a42x2−a43x3)
Método de Gauss-Seidel
\left|\frac{{x_i}^{(k+1)}-{x_i}^{(k)}}{{x_i}^{(k)}}\right|<\epsilon
∣∣∣xi(k)xi(k+1)−xi(k)∣∣∣<ϵ
\displaystyle {x_i}^{(k+1)}=\frac{1}{a_{ii}}\left[b_i-\sum_{j=1,j\neq i}^{j=n}a_{ij}{x_j}^{(k+1)}\right]
xi(k+1)=aii1⎣⎡bi−j=1,j≠i∑j=naijxj(k+1)⎦⎤
Tolerância
Formulação geral
Convergência
\displaystyle|a_{ii}|>\sum_{j=1,j\neq i}^{j=n}|a_{ij}|
∣aii∣>j=1,j≠i∑j=n∣aij∣
Algoritmo de Gauss-Seidel
function [x,it] = gaussSeidel(A, b,p,x0,IM)
[l,c]=size(A);
x=x0;
erro=1;
it=0;
tol=10^(-p);
while erro>tol & it<IM
xa=x;
it=it+1;
for i=1:l
soma=0;
for j=1:l
if i~=j then
soma = soma+x(j)*A(i,j);
end
end
x(i)=(b(i)-soma)/A(i,i);
end
erro = max(abs(x-xa));
end
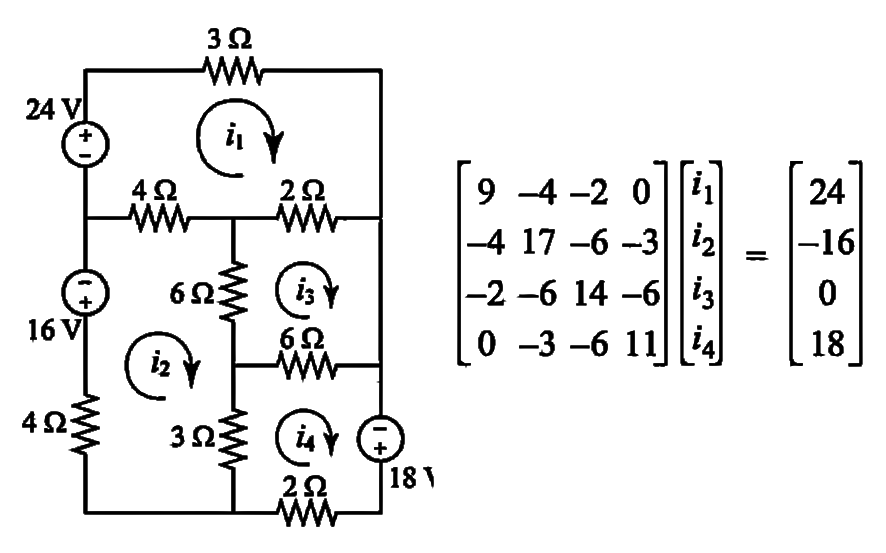
endfunction-->A=[9 -4 -2 0; -4 17 -6 -3; -2 -6 14 -6; 0 -3 -6 11]
A =
9. - 4. - 2. 0.
- 4. 17. - 6. - 3.
- 2. - 6. 14. - 6.
0. - 3. - 6. 11.
-->b=[24;-16;0;18]
b =
24.
- 16.
0.
18.
-->[x,it]=gaussSeidel(A,b,3,[0;0;0;0],30)
it =
21.
x =
4.0323098
1.6525125
2.8429926
3.6377721Mais um exemplo
Lista de Exercícios
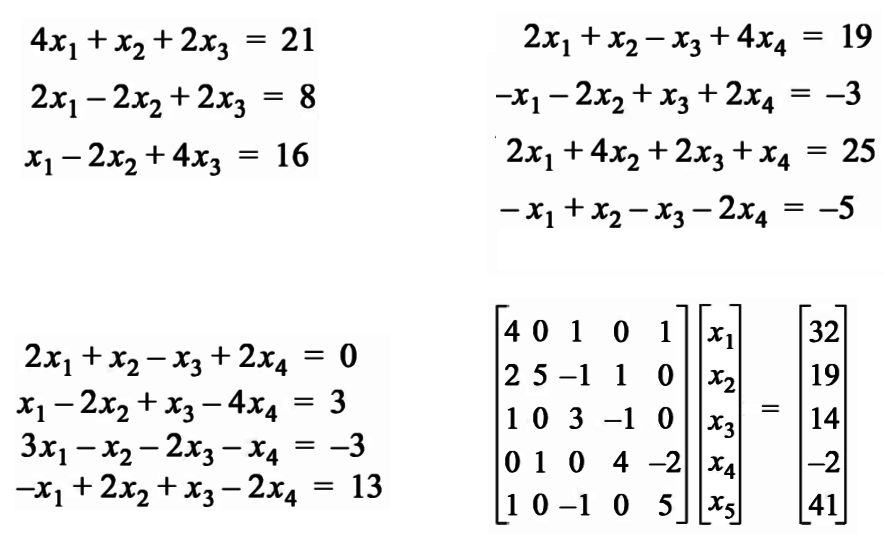
Solucione os sistemas a seguir utilizando os métodos de Gauss com pivotação e Gauss-Seidel (escolha dois sistemas para cada método). No caso do método iterativo, teste o critério das linhas e conduza três iterações. Verifique seu resultado com aquele produzido pelo algoritmo (limitado para 3 iterações). Depois, solucione o sistema utilizando o algoritmo com uma tolerância e=0.01.
Ajuste de curvas e interpolação
Regressão
Encontra-se uma única curva que represente a tendência geral dos dados e que pode não passar exatamente pelos pontos. Esta abordagem é adequada a dados com incertezas, graus de erro e ruídos. Por exemplo, dados de um experimento científico.
Interpolação
Ajusta uma curva que passa exatamente pelos pontos dados. Para esta abordagem, assume-se que as medições são exatas, ou seja, sem influência de incertezas ou erros.
Regressão por mínimos quadrados (best fit)
Ajuste de curvas e interpolação
Regressão por mínimos quadrados
Para um dado conjunto de pontos de tamanho n, determinar o polinômio de grau m que melhor represente este conjunto.
f(x)=a_mx^m+a_{m-1}x^{m-1}+...+a_1x+a_0
f(x)=amxm+am−1xm−1+...+a1x+a0
Forma geral de um polinômio:
Regressão por mínimos quadrados
Resume-se à solução do seguinte sistema linear de ordem m+1:
Exercício
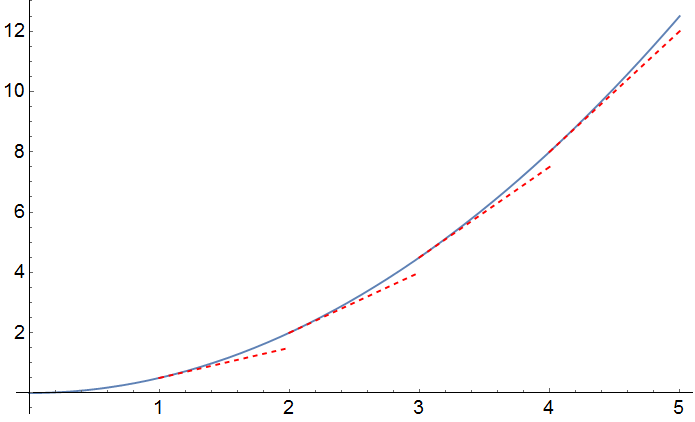
Um teste de tensão é conduzido para determinar o comportamento tensão-deformação da borracha. Os pontos de dados do teste são apresentados na tabela abaixo. Determine o polinômio de quarta ordem que melhor se adapta aos pontos de dados. Plote os pontos de dados e a curva que corresponde ao polinômio.
Deformação :
[0.0 0.4 0.8 1.2 1.6 2.0 2.4 2.8 3.2 3.6 4.0 4.4 4.8 5.2 5.6 6.0]
Tensão:
[0.0 3.0 4.5 5.8 5.9 5.8 6.2 7.4 9.6 15.6 20.7 26.7 31.1 35.6 39.3 41.5]
Exercício
Deformação :
[0.0 0.4 0.8 1.2 1.6 2.0 2.4 2.8 3.2 3.6 4.0 4.4 4.8 5.2 5.6 6.0]
Tensão:
[0.0 3.0 4.5 5.8 5.9 5.8 6.2 7.4 9.6 15.6 20.7 26.7 31.1 35.6 39.3 41.5]
f(x)=a_4x^4+a_3x^3+a_2x^2+a_1x+a_0
f(x)=a4x4+a3x3+a2x2+a1x+a0
Interpolação
Ajuste de curvas e interpolação
Interpolação por polinômios de Lagrange
f(x)=\displaystyle\sum_{i=1}^ny_i\prod_{j=1,j\neq i}^n\frac{(x-x_j)}{(x_i-x_j)}
f(x)=i=1∑nyij=1,j≠i∏n(xi−xj)(x−xj)
x\rightarrow
x→
Abscissa em que se deseja obter a interpolação
x_i,x_j\rightarrow
xi,xj→
Abscissas do conjunto de pontos
y_i\rightarrow
yi→
Ordenadas do conjunto de pontos
f(x)\rightarrow
f(x)→
Polinômio de ordem m=n-1
n\rightarrow
n→
Quantidade de pontos
Interpolação por Lagrange: exemplo
x = [ 1 2 4 5 7]
y = [52 5 -5 -40 10]
Utilizando o método de Lagrange, determine o polinômio que passa por todos estes pontos e depois avalie seu resultado em x=3.
f(x)=\displaystyle\sum_{i=1}^ny_i\prod_{j=1,j\neq i}^n\frac{(x-x_j)}{(x_i-x_j)}
f(x)=i=1∑nyij=1,j≠i∏n(xi−xj)(x−xj)
Só aplicar:
Interpolação por Lagrange: exemplo
x = [ 1 2 4 5 7]
y = [52 5 -5 -40 10]
Utilizando o método de Lagrange, determine o polinômio que passa por todos estes pontos e depois avalie seu resultado em x=3.
f(x)=\quad\displaystyle\frac{(x-2)(x-4)(x-5)(x-7)}{(1-2)(1-4)(1-5)(1-7)}52+\frac{(x-1)(x-4)(x-5)(x-7)}{(2-1)(2-4)(2-5)(2-7)}5
f(x)=(1−2)(1−4)(1−5)(1−7)(x−2)(x−4)(x−5)(x−7)52+(2−1)(2−4)(2−5)(2−7)(x−1)(x−4)(x−5)(x−7)5
\displaystyle+\frac{(x-1)(x-2)(x-5)(x-7)}{(4-1)(4-2)(4-5)(4-7)}(-5)+\frac{(x-1)(x-2)(x-4)(x-7)}{(5-1)(5-2)(5-4)(5-7)}(-40)
+(4−1)(4−2)(4−5)(4−7)(x−1)(x−2)(x−5)(x−7)(−5)+(5−1)(5−2)(5−4)(5−7)(x−1)(x−2)(x−4)(x−7)(−40)
\displaystyle+\frac{(x-1)(x-2)(x-4)(x-5)}{(7-1)(7-2)(7-4)(7-5)}10
+(7−1)(7−2)(7−4)(7−5)(x−1)(x−2)(x−4)(x−5)10
f(3)=6
f(3)=6
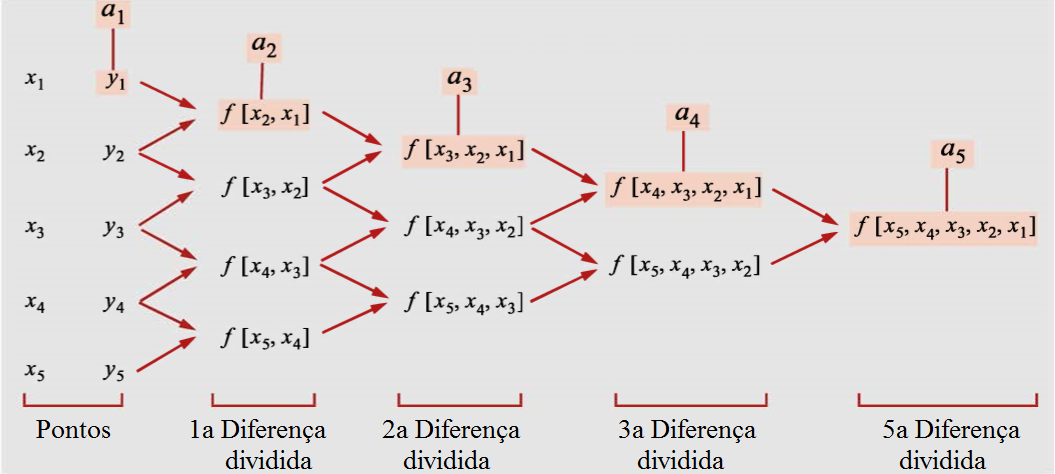
Método de Newton
- Conjunto de dados de tamanho n produzirá um polinômio de grau m=n-1 na forma
f(x)=a_1+a_2(x-x_1)+a_3(x-x_1)(x-x_2)
f(x)=a1+a2(x−x1)+a3(x−x1)(x−x2)
- Exemplo de grau 3
- Os coeficientes a1 até an são dados pelas diferenças divididas.
f(x)=a_1+\displaystyle\sum_{i=2}^na_i\prod_{j=1}^{i-1}(x-x_j)
f(x)=a1+i=2∑naij=1∏i−1(x−xj)
Diferenças divididas:
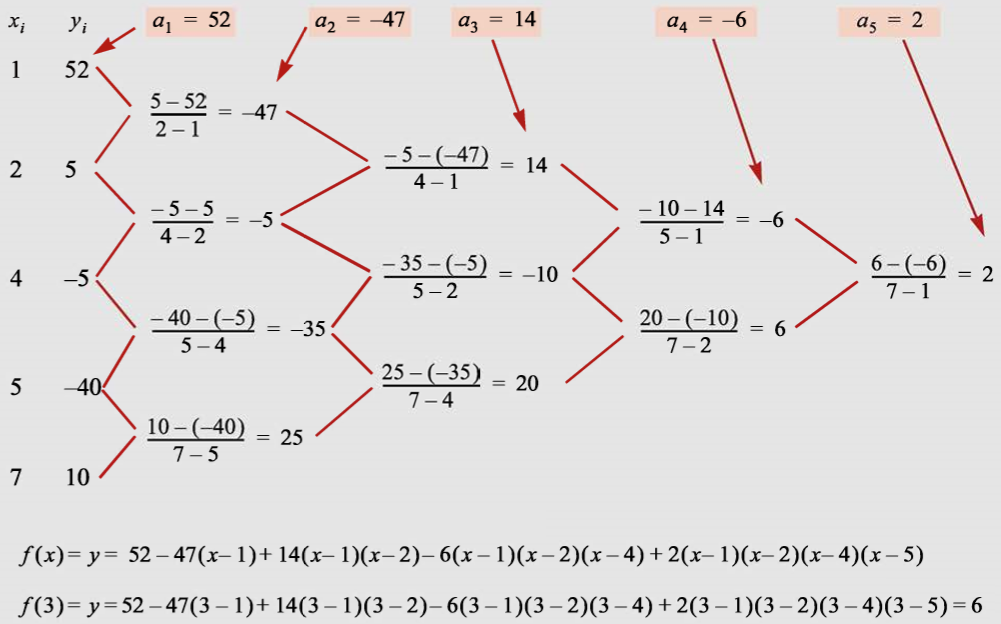
Interpolação por Newton: exemplo
x = [ 1 2 4 5 7]
y = [52 5 -5 -40 10]
Determine o polinômio que passa por todos os pontos dados utilizando a fórmula de Newton e avalie o seu valor em x=3.
f(x)=a_1+\displaystyle\sum_{i=2}^na_i\prod_{j=1}^{i-1}(x-x_j)
f(x)=a1+i=2∑naij=1∏i−1(x−xj)
Só aplicar:
Interpolação por Newton: exemplo
Comparação entre Newton e Lagrange
- Em ambos os métodos a distância entre as abscissas pode ser diferente.
- No método de Lagrange, o cálculo para cada abscissa de interpolação é feito de forma única. Por exemplo, o cálculo para interpolar em x=2 é diferente do cálculo para interpolar em x=3. Por outro lado, no método de Newton, uma vez que os coeficientes a1 ~ an forem determinados, o mesmo polinômio serve para interpolar em qualquer abscissa.
- No método de Lagrange, sempre que houver novos pontos para adicionar ao conjunto original de pontos, todo o cálculo deve ser refeito. Por outro lado, no método de Newton os novos pontos podem ser adicionados e apenas os novos coeficientes necessitam ser calculados.
- No método de Newton as abscissas não precisam estar em ordem.
Extrapolação
- Estimar valor da função fora do intervalo de valores conhecidos.
- Extrapolações cuidadosas constituem uma poderosa ferramenta em várias áreas, como por exemplo, na resolução numérica de equações diferencias.
- Algoritmos de interpolação fazem extrapolação, porém, sem qualquer garantia de aquele valor representar a realidade.
- Algoritmos de regressão fazem extrapolação, caso confirme-se, por meio de algum índice (ex: correlação), que o modelo escolhido representa bem o conjunto de pontos.
Exercícios
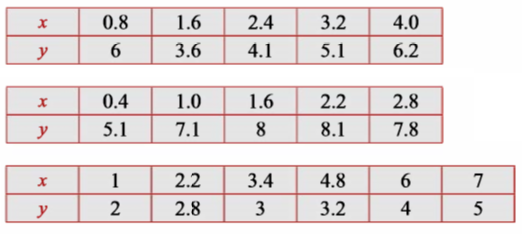
Para cada um dos conjuntos de dados abaixo mostrados, faça o que se pede:
a) Produza 3 modelos polinomiais (regressão) com grau n=1, n=2 e n=3 e plote-os juntos num gráfico. Os pontos originais devem aparecer em pontos vermelhos. Baseado no seu olhômetro, diga qual foi o grau que melhor representou o comportamento dos pontos.
b) Aplique o método de interpolação de Newton no primeiro conjunto e o de Lagrange no segundo conjunto. Para o primeiro conjunto, avalie sua interpolação quando x=1.2, e para o segundo conjunto, avalie sua interpolação quando x=2.4.
ESTA LISTA DEVE SER ENTREGUE VIA SIGAA ATÉ O DIA DA PROVA.
O DOCUMENTO DEVE CONTER OS GRÁFICOS E AS FUNÇÕES DO ITEM a), E OS CÁLCULOS DO ITEM b).
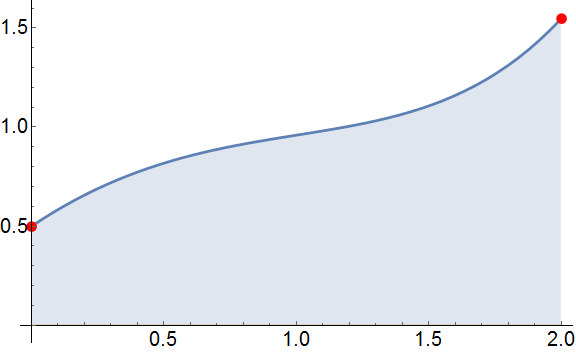
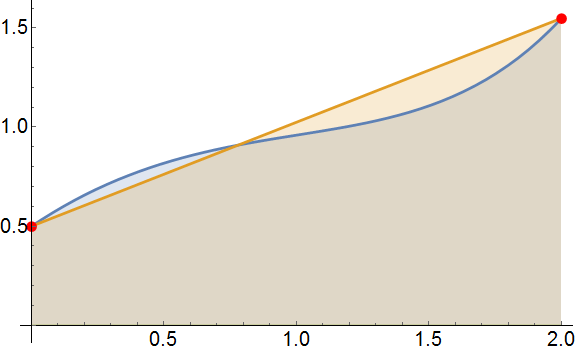
Métodos numéricos de integração
f(x)=e^{0.9x}-x^2-0.5
f(x)=e0.9x−x2−0.5
Calcule:
\displaystyle\int_0^2f(x)dx
∫02f(x)dx
\displaystyle\int_0^2e^{0.9x}-x^2-0.5dx=1.944
∫02e0.9x−x2−0.5dx=1.944
\displaystyle\int_0^2e^{0.9x}-x^2-0.5dx=1.944
∫02e0.9x−x2−0.5dx=1.944
\displaystyle\int_0^2e^{0.9x}-x^2-0.5dx=1.944
∫02e0.9x−x2−0.5dx=1.944
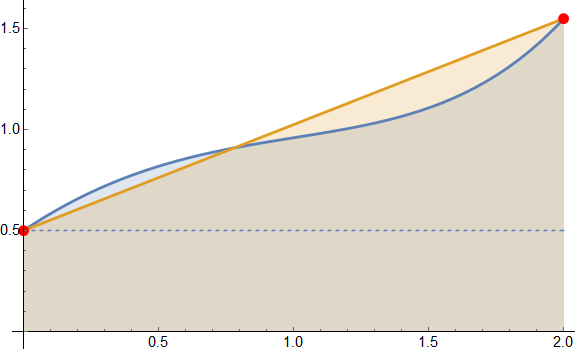
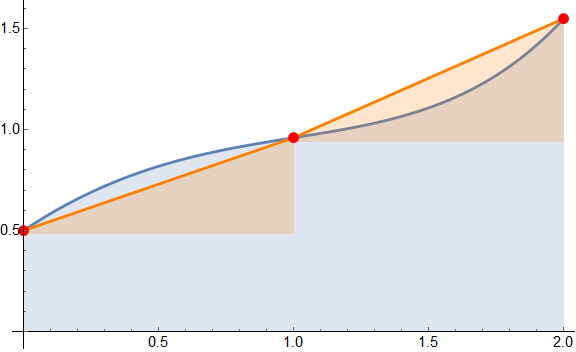
Melhorando a aproximação
Demonstração interativa
Melhoramentos
- O método do trapézio produz um resultado cada vez mais próximo do real, a medida em que o número de sub-intervalos aumenta. Porém, quanto mais intervalos, mais cálculos são necessários. O que fazer para melhorar?
- Ao invés de "fechar" o trapézio por uma reta, vamos fechá-lo por um polinômio de ordem 2 ou mesmo de ordem 3, que são as regras de 1/3 e de 3/8 de Simpson, respectivamente.
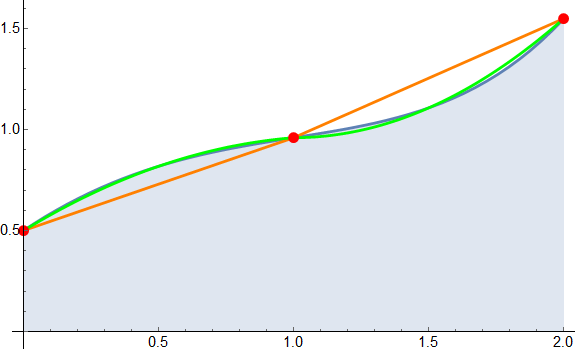
Formulações matemáticas
- Regra do trapézio
- Regra 1/3 de Simpson
- Regra 3/8 de Simpson
I(a,b)=\displaystyle\text{ }\frac{f(a)+f(b)}{2}(b-a)
I(a,b)= 2f(a)+f(b)(b−a)
I(a,b)=\displaystyle\text{ }\frac{1}{3}\cdot\frac{b-a}{2}\left[f(a)+4f\left(\frac{a+b}{2}\right)+f(b)\right]
I(a,b)= 31⋅2b−a[f(a)+4f(2a+b)+f(b)]
I(a,b)=\displaystyle\text{ }\frac{3}{8}\cdot\frac{b-a}{3}\left[f(a)+3f\left(\frac{2a+b}{3}\right)+3f\left(\frac{a+2b}{3}\right)+f(b)\right]
I(a,b)= 83⋅3b−a[f(a)+3f(32a+b)+3f(3a+2b)+f(b)]
Lista de exercícios
\displaystyle\int_0^\pi sin^2(x) dx
∫0πsin2(x)dx
\displaystyle\int_0^{2.4} \frac{2x}{1+x^2} dx
∫02.41+x22xdx
\displaystyle\int_{-3}^{3} -\frac{5}{9}x^2+5 dx
∫−33−95x2+5dx
Calcule o valor das integrais ao lado utilizando cada um dos métodos estudados em sala de aula, ou seja, aplique os três métodos a cada integral. Primeiramente, calcule sem dividir o intervalo. Após isto, divida o intervalo em 2 e posteriormente em 3 subintervalos. Compare com o resultado real e comente sobre as diferenças entre métodos, sobre a influência da divisão do intervalo.
Exemplo
\displaystyle\int_0^{3} e^{-x^2} dx=0.886207
∫03e−x2dx=0.886207
De uma forma generalizada
- Regra do trapézio
- Regra 1/3 de Simpson
- Regra 3/8 de Simpson
I=\displaystyle\text{ }\frac{h}{2}(f(a)+f(b))+h\sum_{i=2}^Nf(x_i)
I= 2h(f(a)+f(b))+hi=2∑Nf(xi)
I=\displaystyle\text{ }\frac{h}{3}\left[f(a)+4\sum_{i=2,4,6}^{2N}f(x_i)+2\sum_{j=3,5,7}^{2N-1}f(x_j)+f(b)\right]
I= 3h[f(a)+4i=2,4,6∑2Nf(xi)+2j=3,5,7∑2N−1f(xj)+f(b)]
I=\displaystyle\text{ }\frac{3h}{8}\left[f(a)+3\sum_{i=2,5,8}^{3N-1}\left[f(x_i)+f(x_{i+1})\right]+2\sum_{j=4,7,10}^{3N-2}f(x_j)+f(b)\right]
I= 83h[f(a)+3i=2,5,8∑3N−1[f(xi)+f(xi+1)]+2j=4,7,10∑3N−2f(xj)+f(b)]
PROVA 3
I=\displaystyle\text{ }\frac{h}{2}(f(a)+f(b))+h\sum_{i=2}^Nf(x_i)
I= 2h(f(a)+f(b))+hi=2∑Nf(xi)
I=\displaystyle\text{ }\frac{h}{3}\left[f(a)+4\sum_{i=2,4,6}^{2N}f(x_i)+2\sum_{j=3,5,7}^{2N-1}f(x_j)+f(b)\right]
I= 3h[f(a)+4i=2,4,6∑2Nf(xi)+2j=3,5,7∑2N−1f(xj)+f(b)]
I=\displaystyle\text{ }\frac{3h}{8}\left[f(a)+3\sum_{i=2,5,8}^{3N-1}\left[f(x_i)+f(x_{i+1})\right]+2\sum_{j=4,7,10}^{3N-2}f(x_j)+f(b)\right]
I= 83h[f(a)+3i=2,5,8∑3N−1[f(xi)+f(xi+1)]+2j=4,7,10∑3N−2f(xj)+f(b)]
I(a,b)=\displaystyle\text{ }\frac{f(a)+f(b)}{2}(b-a)
I(a,b)= 2f(a)+f(b)(b−a)
I(a,b)=\displaystyle\text{ }\frac{1}{3}\cdot\frac{b-a}{2}\left[f(a)+4f\left(\frac{a+b}{2}\right)+f(b)\right]
I(a,b)= 31⋅2b−a[f(a)+4f(2a+b)+f(b)]
I(a,b)=\displaystyle\text{ }\frac{3}{8}\cdot\frac{b-a}{3}\left[f(a)+3f\left(\frac{2a+b}{3}\right)+3f\left(\frac{a+2b}{3}\right)+f(b)\right]
I(a,b)= 83⋅3b−a[f(a)+3f(32a+b)+3f(3a+2b)+f(b)]
k_1=f(x_i,y_i)
k1=f(xi,yi)
k_2=f(x_i+\frac{1}{2}h,y_i+\frac{1}{2}k_1h)
k2=f(xi+21h,yi+21k1h)
k_3=f(x_1+\frac{1}{2}h,y_i+\frac{1}{2}k_2h)
k3=f(x1+21h,yi+21k2h)
k_4=f(x_i+h,y_i+k_3h)
k4=f(xi+h,yi+k3h)
y_{i+1}=y_i+\frac{h}{6}(k_1+2k_2+2k_3+k_4)
yi+1=yi+6h(k1+2k2+2k3+k4)
ATENÇÃO: DESCONSIDERAR 0 NA COLUNA v'(t)
Observações:
- Espaço entre os pontos (passo de integração)
- Na regra 1/3 de Simpson, o número de subintervalos deve ser obrigatoriamente par. (Por quê?)
- Na regra 3/8 de Simpson, o número de subintervalos deve ser obrigatoriamente múltiplo de 3 e maior que 6. (Por quê?)
- De uma forma geral, na regra de 1/3 Simpson, para dividir o intervalo por N deve-se, na verdade, dividir por 2N. Por outro lado, na regra de 3/8 de Simpson, para dividir o intervalo por N, deve-se, na verdade, dividir por 3N.
h=\displaystyle\text{ }\frac{b-a}{N}
h= Nb−a
Solução de equações diferenciais ordinárias (EDOs)
- Uma equação diferencial ordinária ou EDO é uma equação que contém uma função de uma variável independente e, também, suas derivadas, ou matematicamente
- Equações diferenciais ordinárias (EDOs) surgem em muitos contextos diferentes ao longo da matemática e da ciência (social e natural) de uma forma ou de outra, porque quando descrevendo mudanças matematicamente, a maneira mais precisa usa as derivadas. Uma vez que várias derivadas e funções tornam-se inevitavelmente relacionadas umas às outras através de equações, uma equação diferencial é o resultado, descrevendo fenômenos dinâmicos, evolução e variação.
F(x,y,y',y'',...,y^{n-1})=y^n
F(x,y,y′,y′′,...,yn−1)=yn
Exemplos
Métodos Numéricos de Solução de EDOs
Método
Runge-Kutta 4a ordem
Solução de EDOs
Método
Runge-Kutta 4a ordem
k_1=f(x_i,y_i)
k1=f(xi,yi)
k_2=f(x_i+\frac{1}{2}h,y_i+\frac{1}{2}k_1h)
k2=f(xi+21h,yi+21k1h)
k_3=f(x_1+\frac{1}{2}h,y_i+\frac{1}{2}k_2h)
k3=f(x1+21h,yi+21k2h)
k_4=f(x_i+h,y_i+k_3h)
k4=f(xi+h,yi+k3h)
y_{i+1}=y_i+\frac{h}{6}(k_1+2k_2+2k_3+k_4)
yi+1=yi+6h(k1+2k2+2k3+k4)
Computação Numérica
By Filipe Taveiros
Computação Numérica
Turma de reposição

