












































Daniel Haehn PRO
Hi, I am a biomedical imaging and visualization researcher who investigates how computational methods can accelerate biological and medical research.
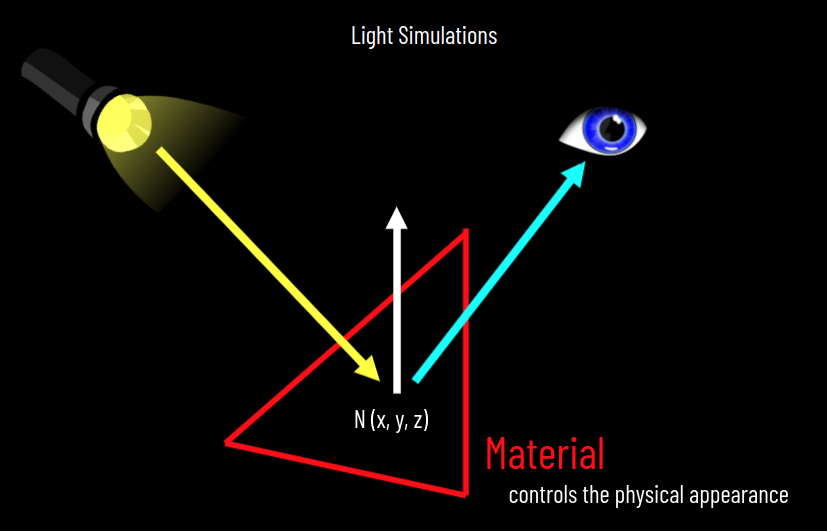
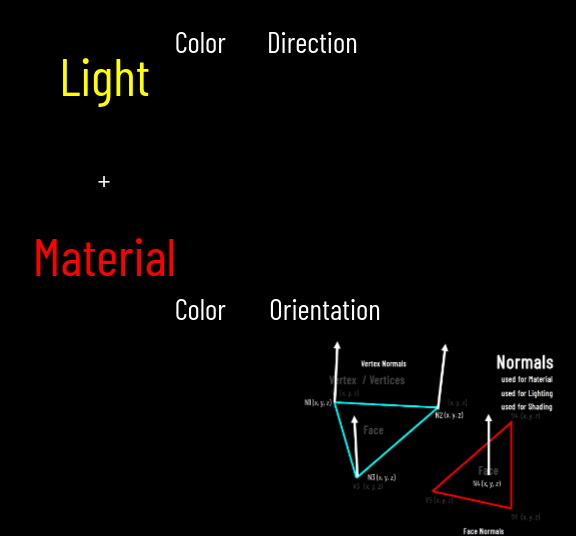
11/6 Materials
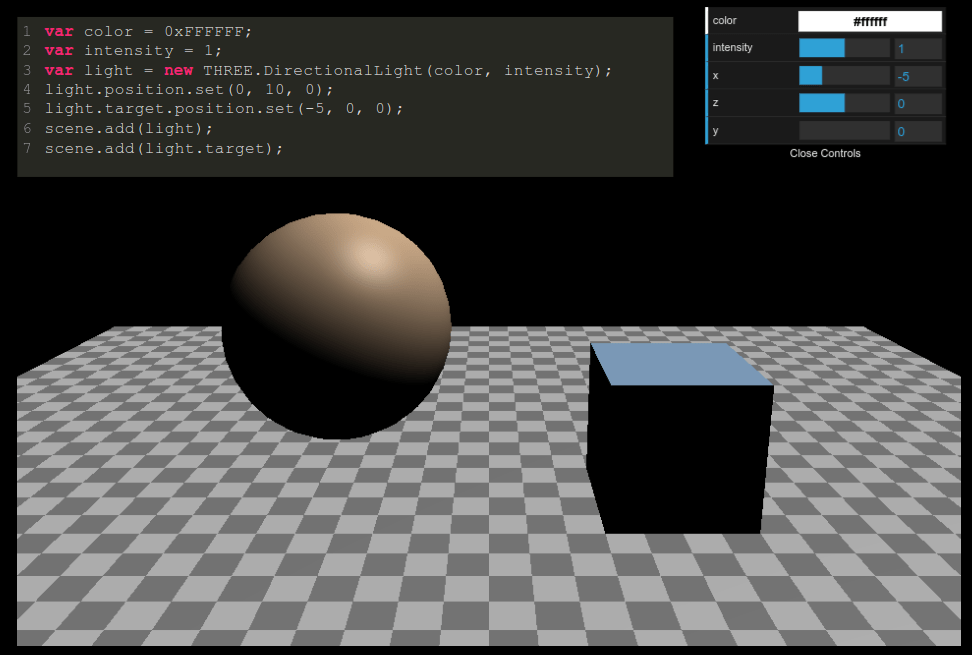
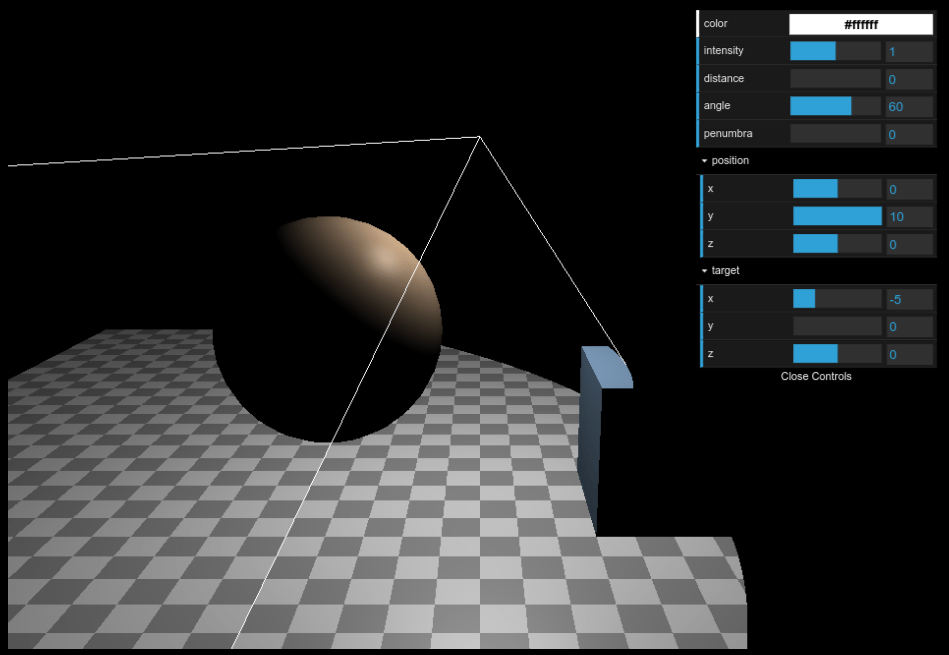
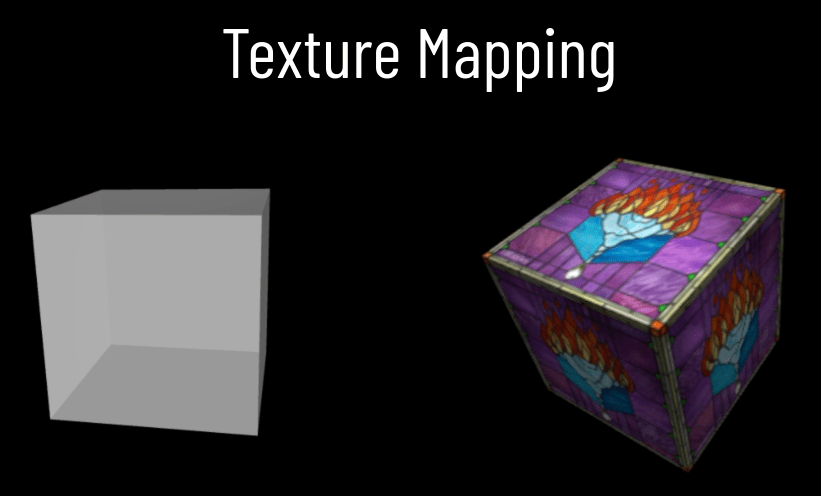
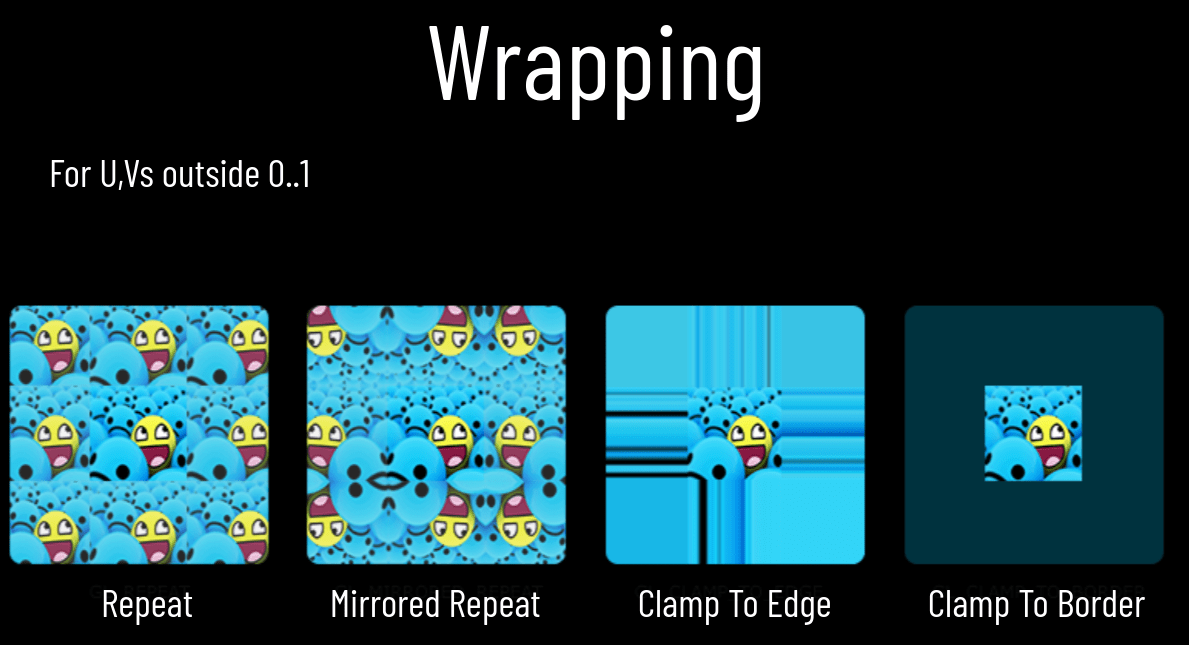
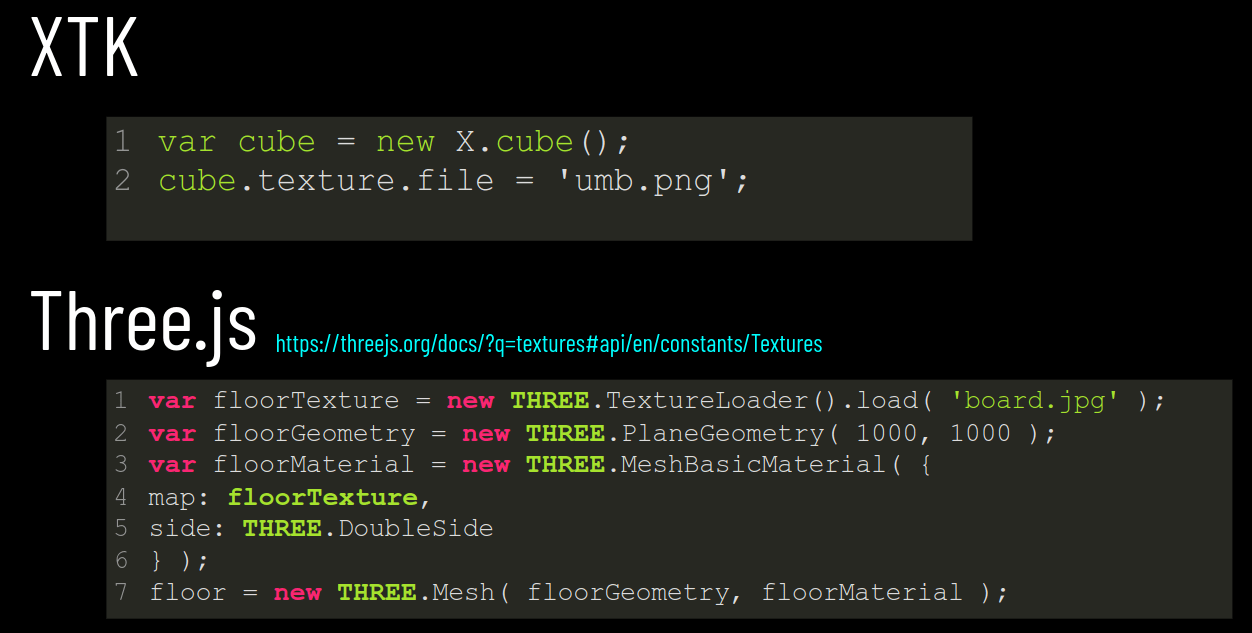
11/13 Lights + Textures
11/18 Medical Visualization / Volume Rendering
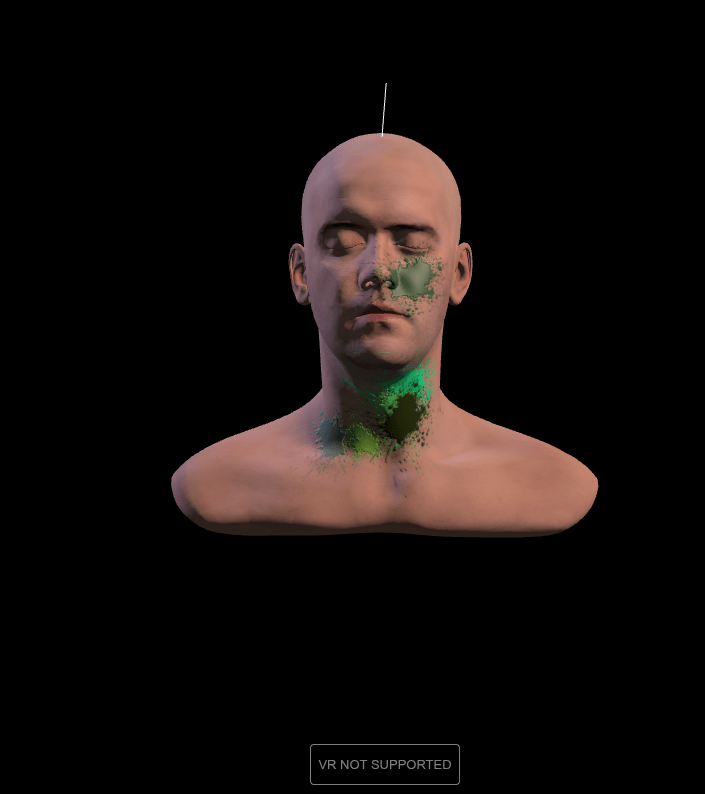
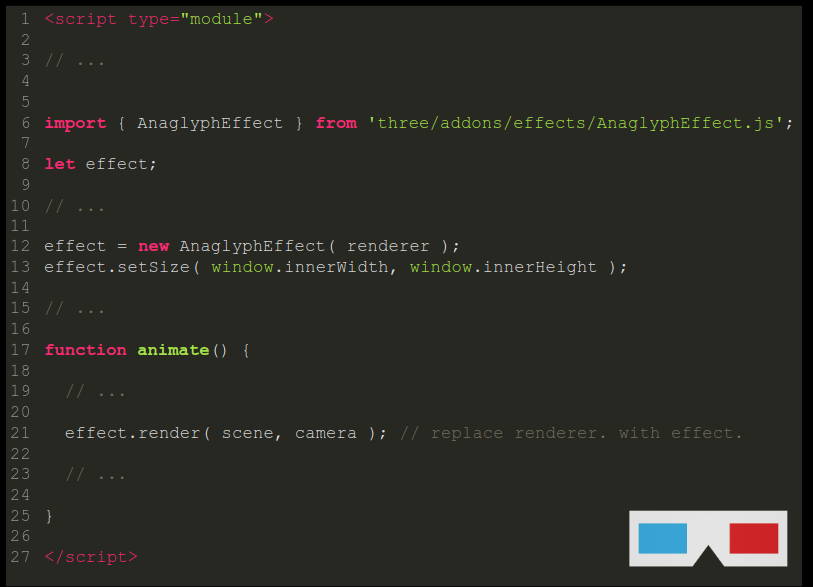
11/20 NeRFs + glTF
12/2 Outside Lecture + Skybox
11/25 Fast Forwards!
11/27 No Class
12/4 Recap Lecture
12/9 Presentations!
12/11 Presentations II!
+
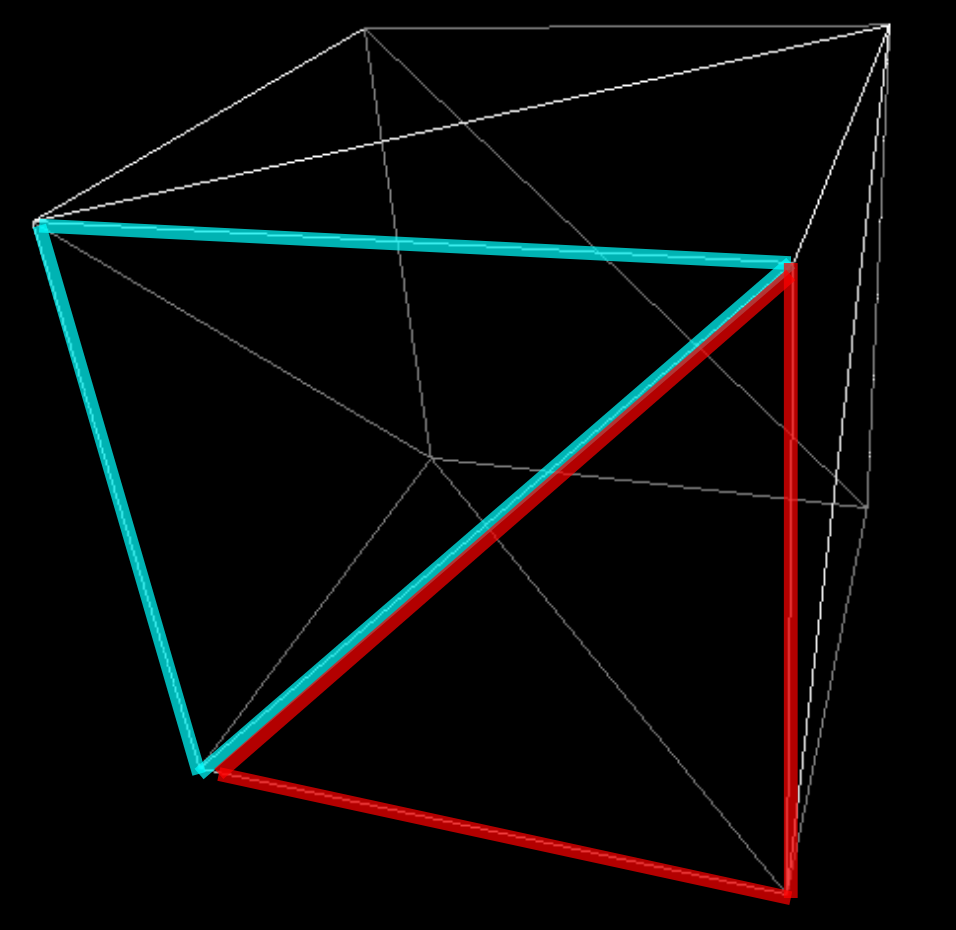
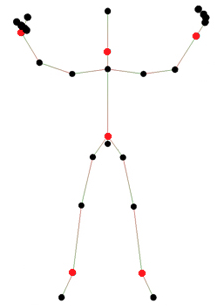
3D model
Assignment 5
Due 11/25!
Assignment 5
render scene from LIGHT
create DEPTH MAP
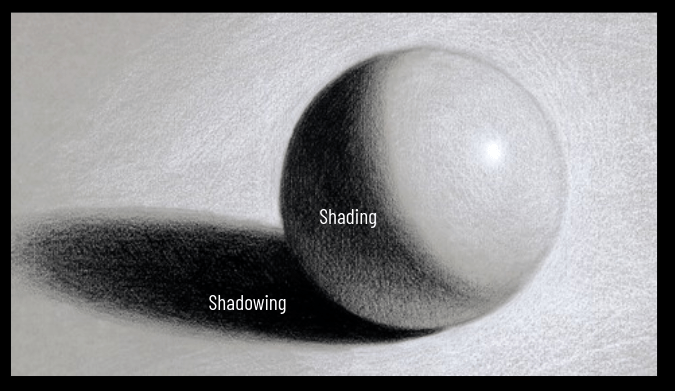
calculate shadows
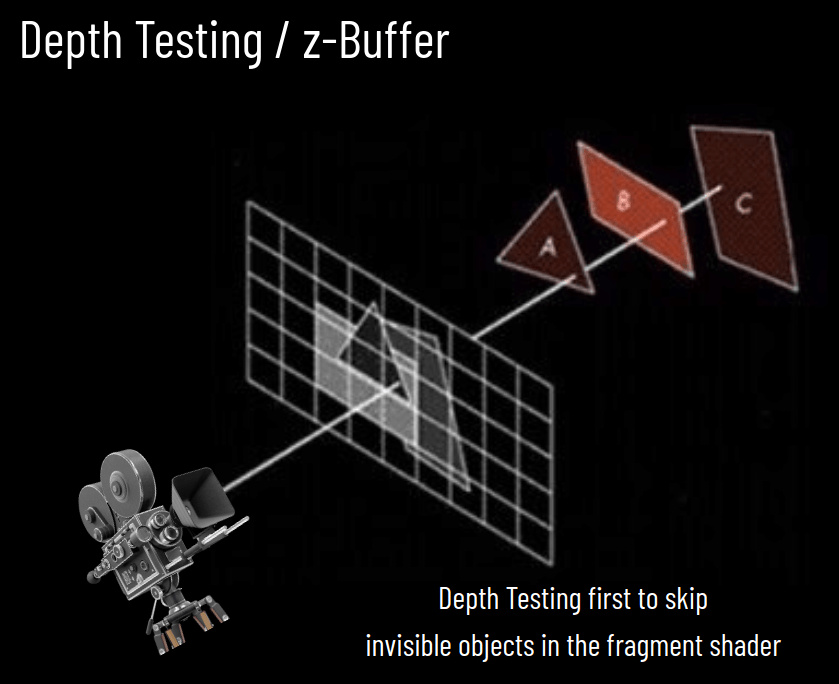
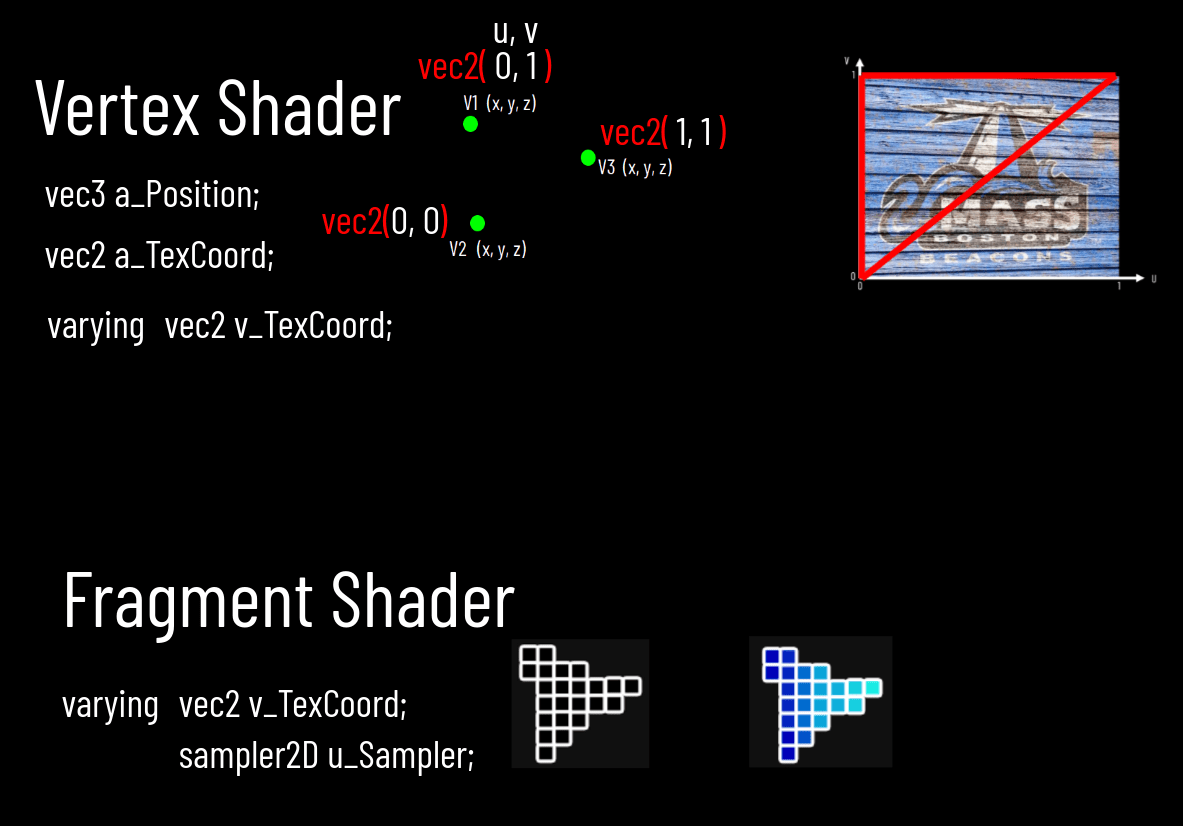
Fragment Shader
Assignment 6
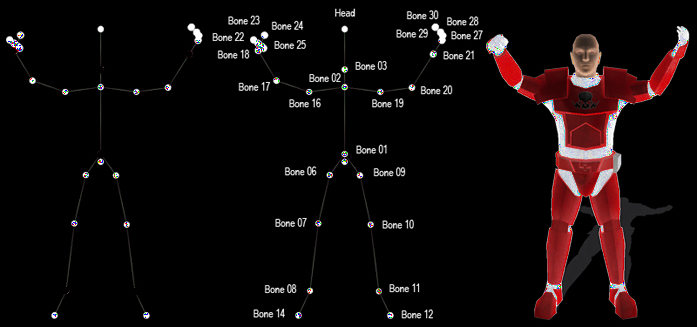
Head
Upper Arm
Lower Arm
Hand
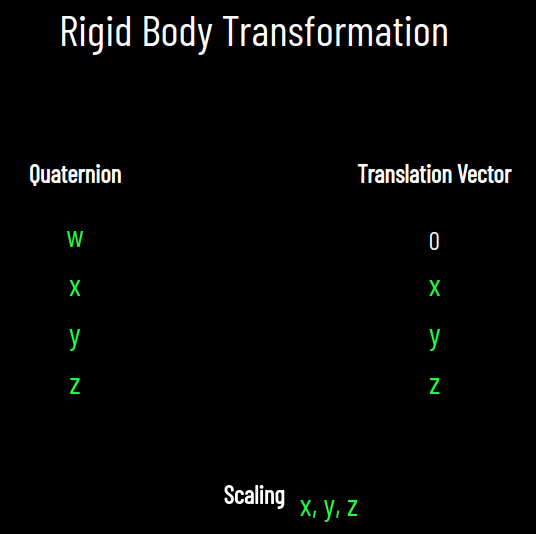
q
q (0, 0, 0, 1)
Identity
X
Head
Upper Arm
q
q (0, 0, 0, 1)
Identity
X
q2 (Math.sin(T/2),
0,
0,
Math.cos(T/2))
Rotate 180° in X
T = Math.PI
q
q2
Arm down
Arm up
Time
Frames
Keyframe 2
Keyframe 1
slerp Interpolation
60 FPS
60 Hz
60 1/s
Modern computer screens
Skinning
Skeleton -> Mesh
Rigging
Mesh -> Skeleton
Blender, 3D Studio Max, Maya
Assignment 5
Final Project!
counts as 40% of your grade!
#finalproject
Manning College of Nursing
Final Project Tracks
Final Project!
counts as 40%
1-3 students per team
start thinking about it now :)
Fast Forward 11/25
Presentations 12/9+11
Submission 12/18
Fast Forward (30-60 seconds)
Final Project Presentation
Final Submission
Tu 11/25
Th 12/09
Th 12/18
Tu 12/11
pre-recorded or live!
#finalproject
#finalproject
Creativity Bonus
create art!
qualifies for Straight-A shortcut!!
for example: https://www.aquarium.ru/en
Fast Forward
Final Project
Presentation
Code
README.md
50%
30%
20%
5-min
5%
15%
40% of your grade!!!
What are Fast Forwards?
18:28
23:09
25:30
1:19:15
Video or Live
Loud and Proud!
What you (or your team) plan on doing and why!
Fast Forward (30-60 seconds)
Tu 11/25
MEGA
QUIZ
Bonus only, counts as 4 quizzes!!
Soon on Canvas!
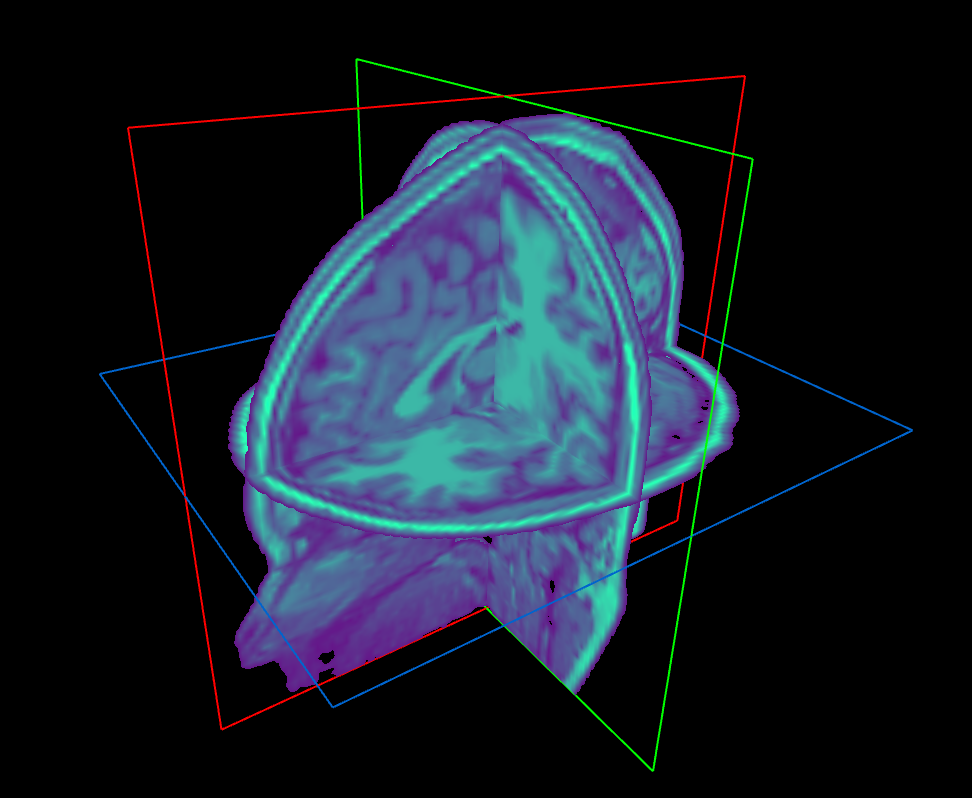
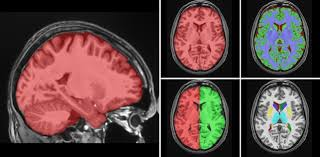
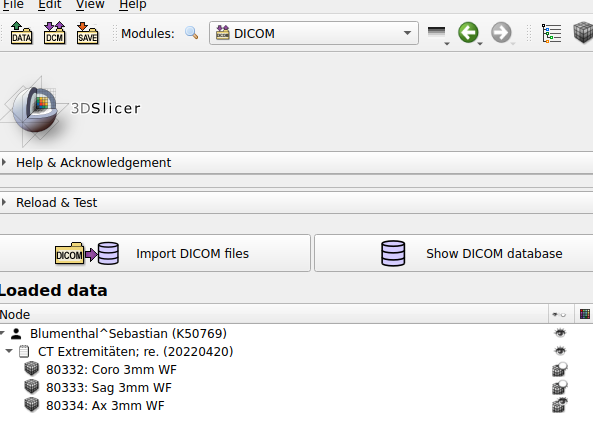
Brain Camera
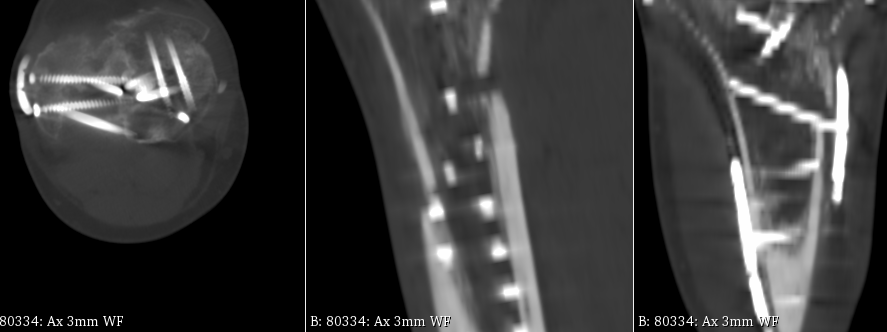
MRI Scanner
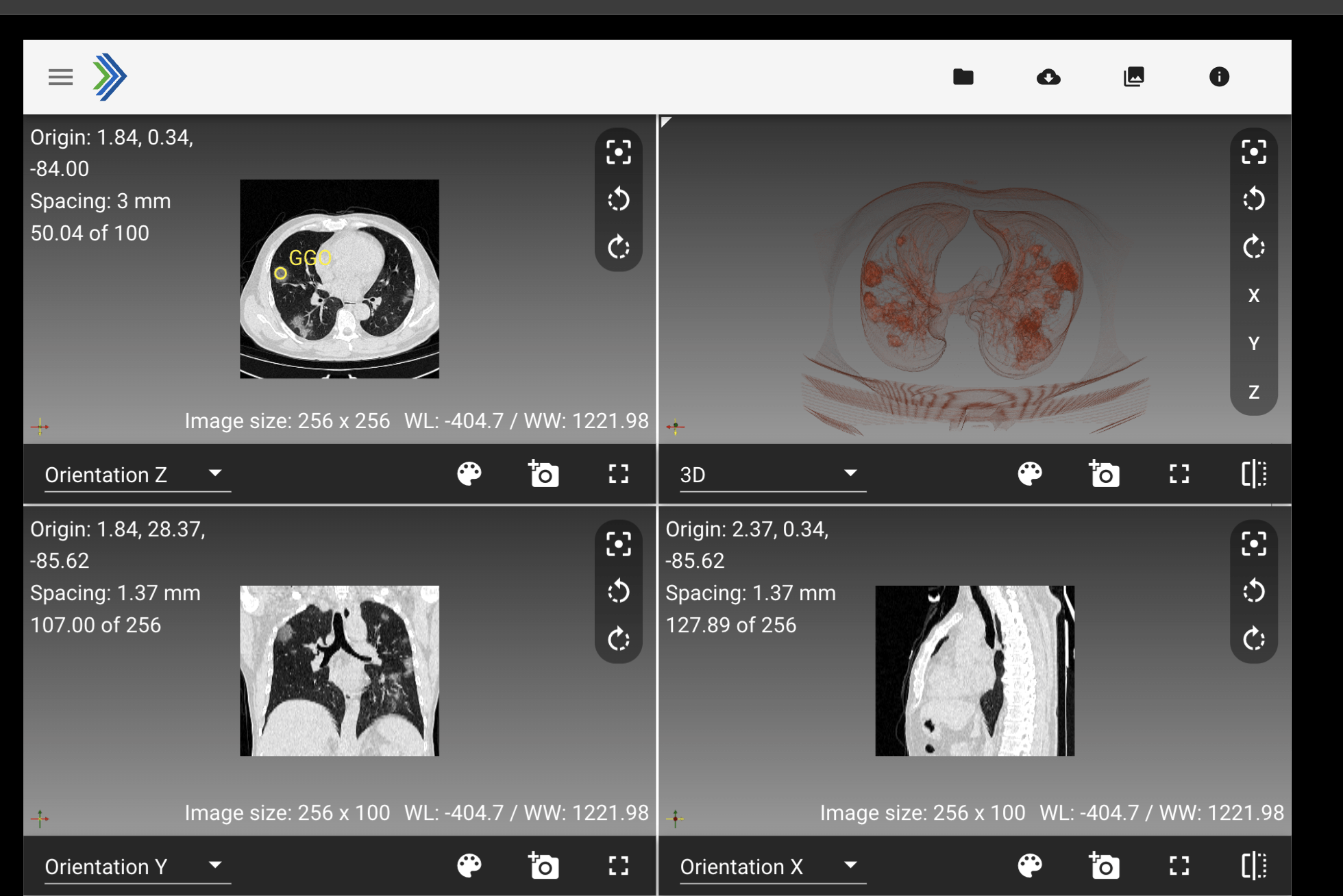
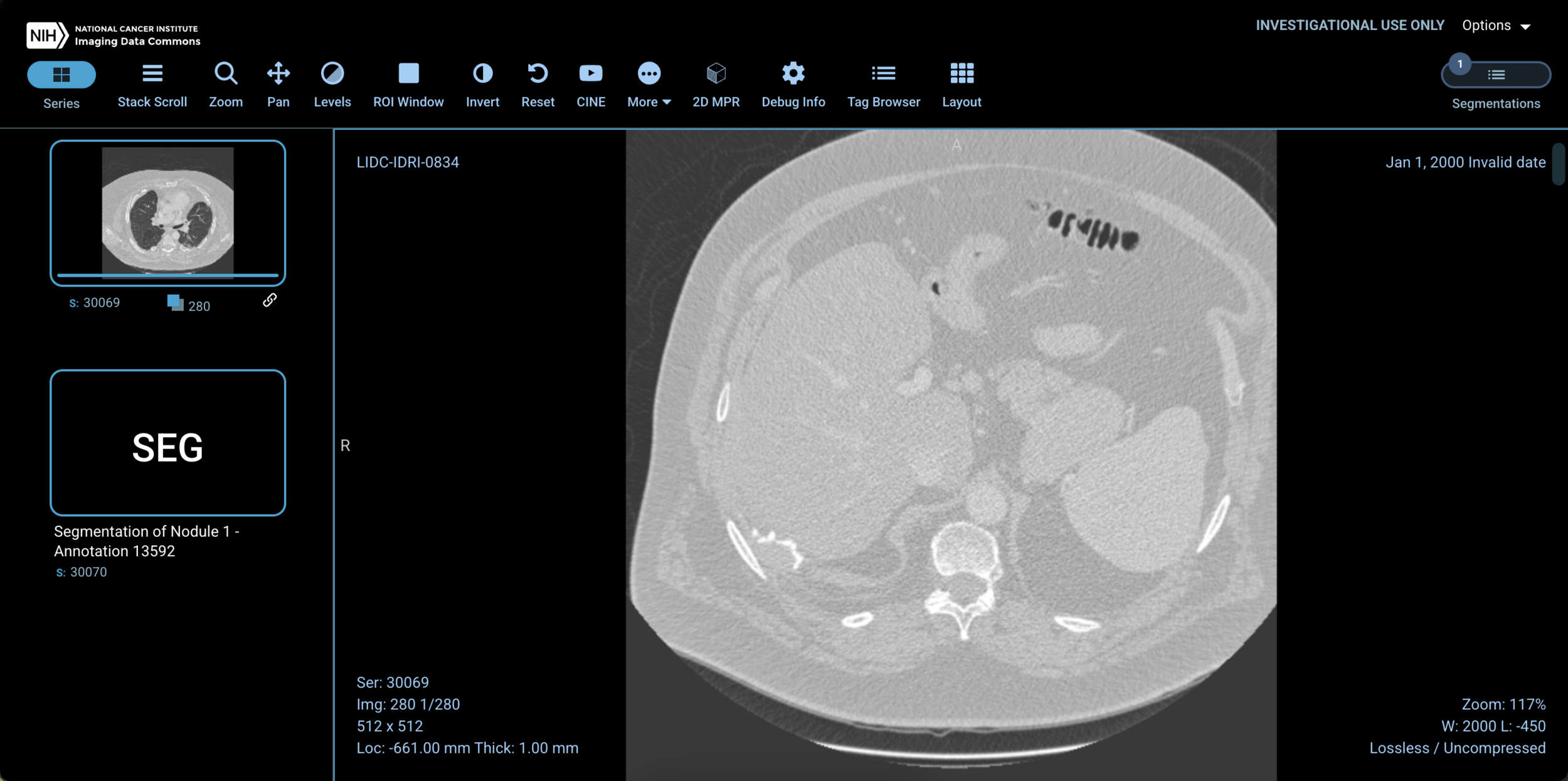
CT Scanner
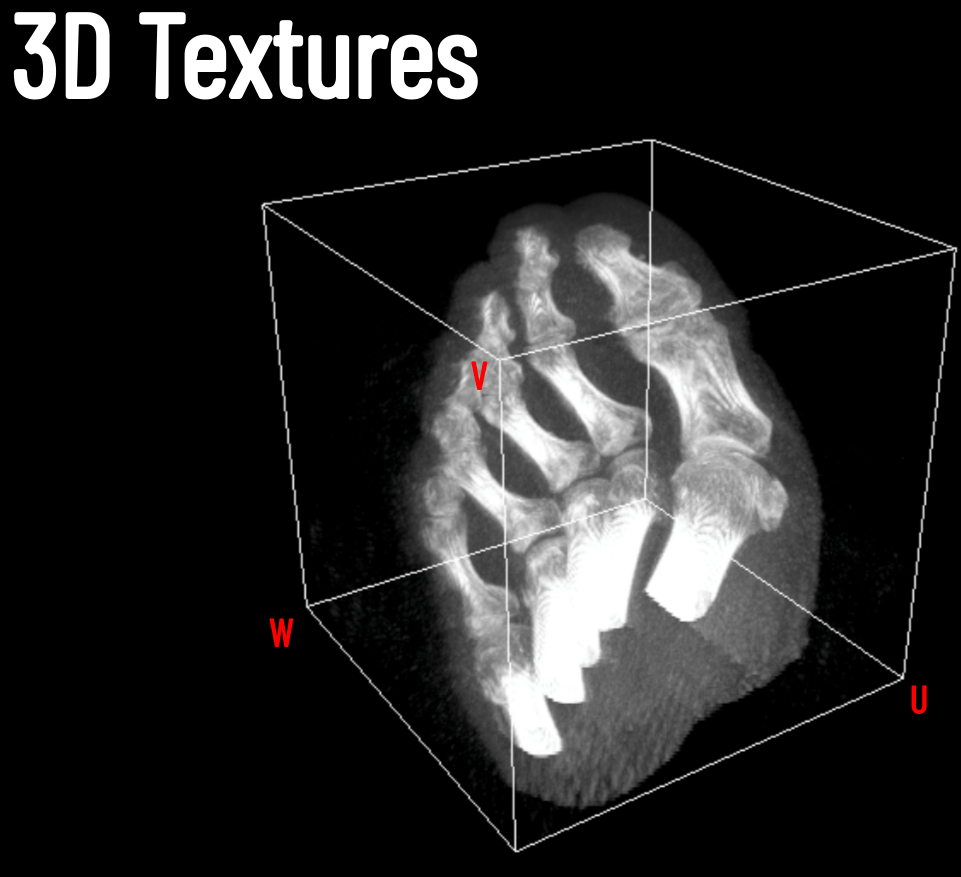
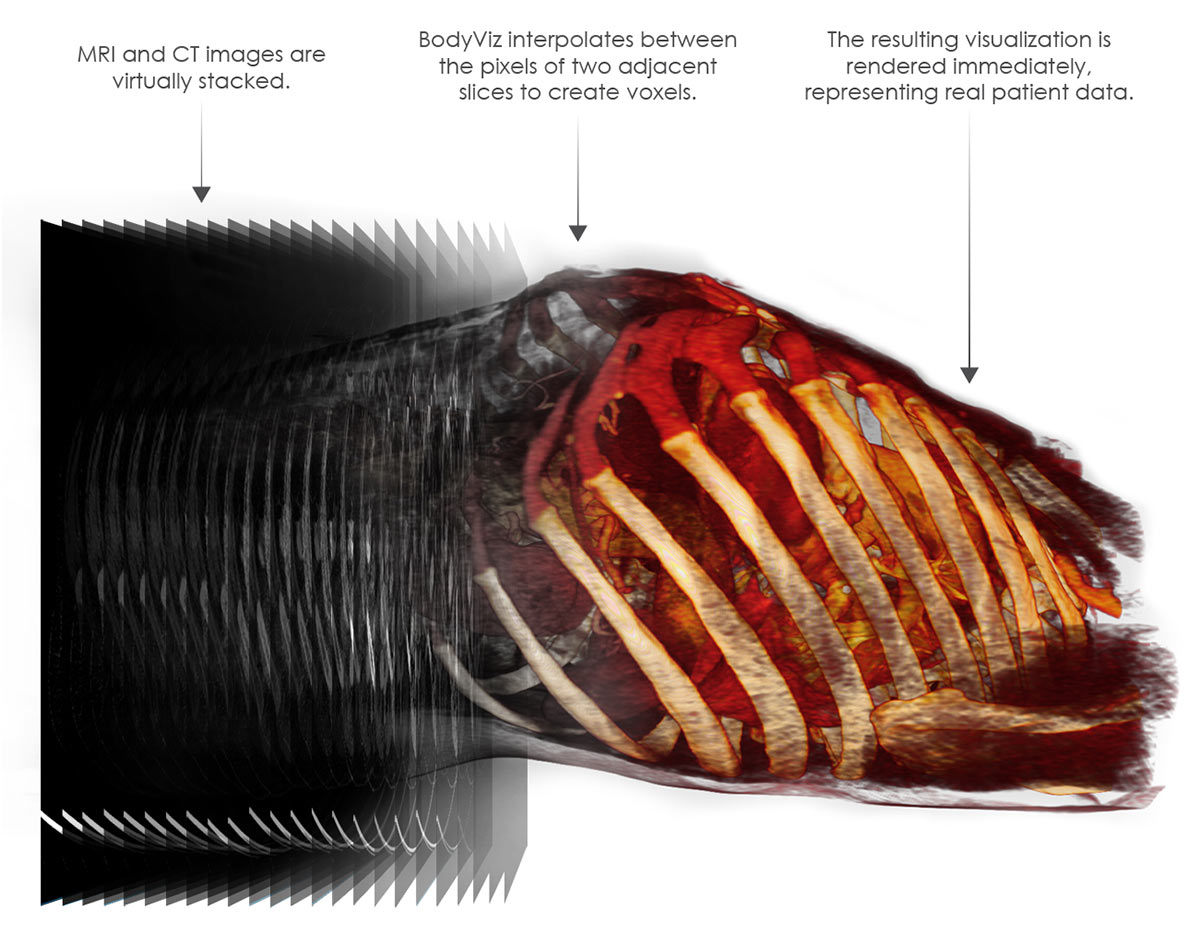
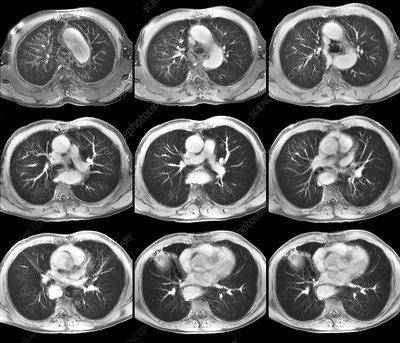
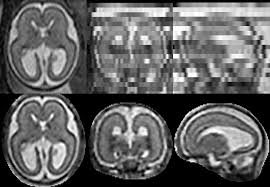
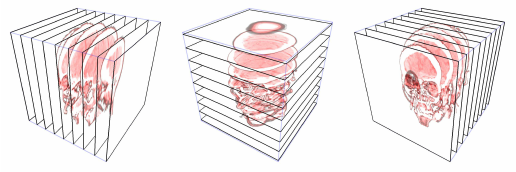
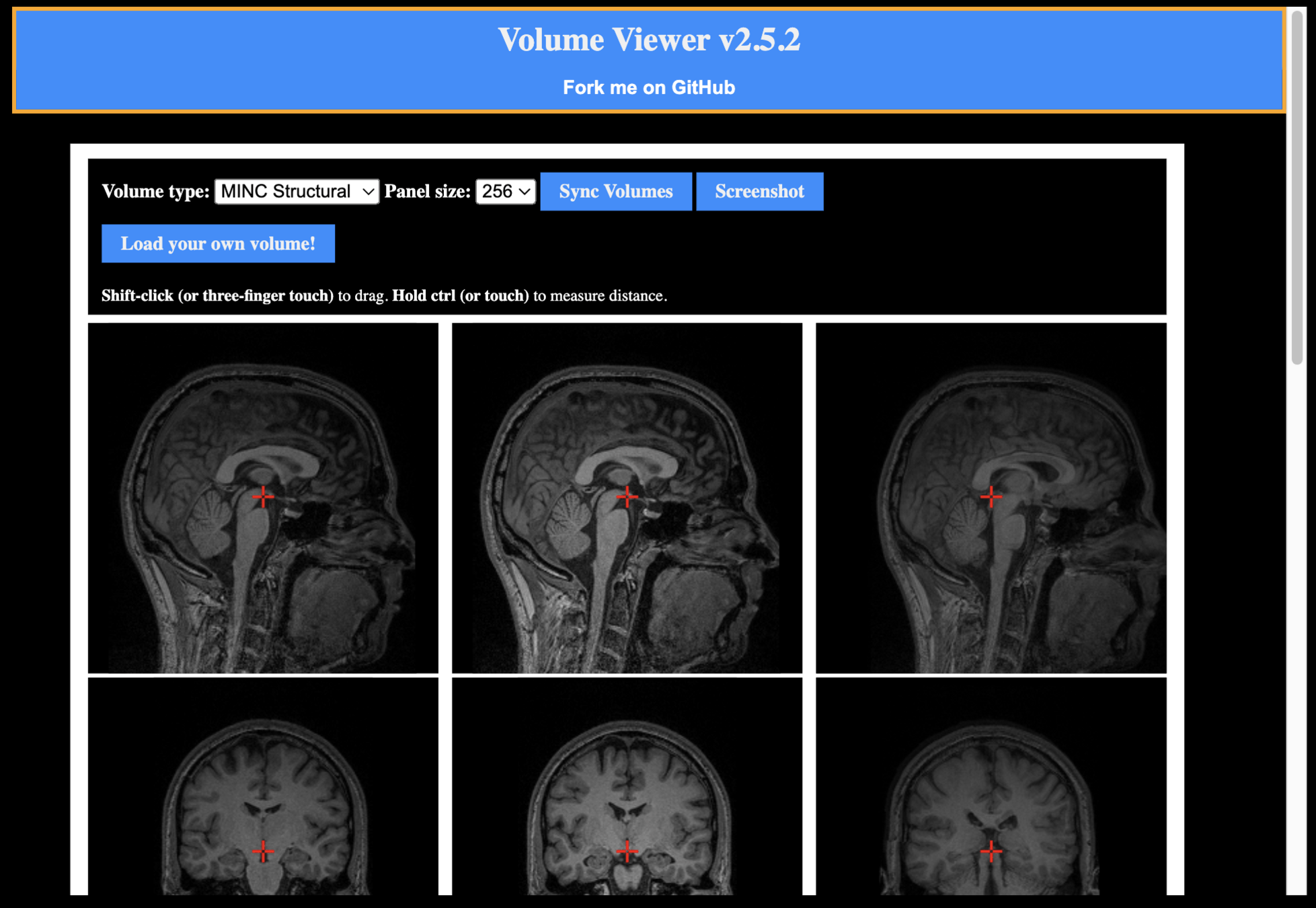
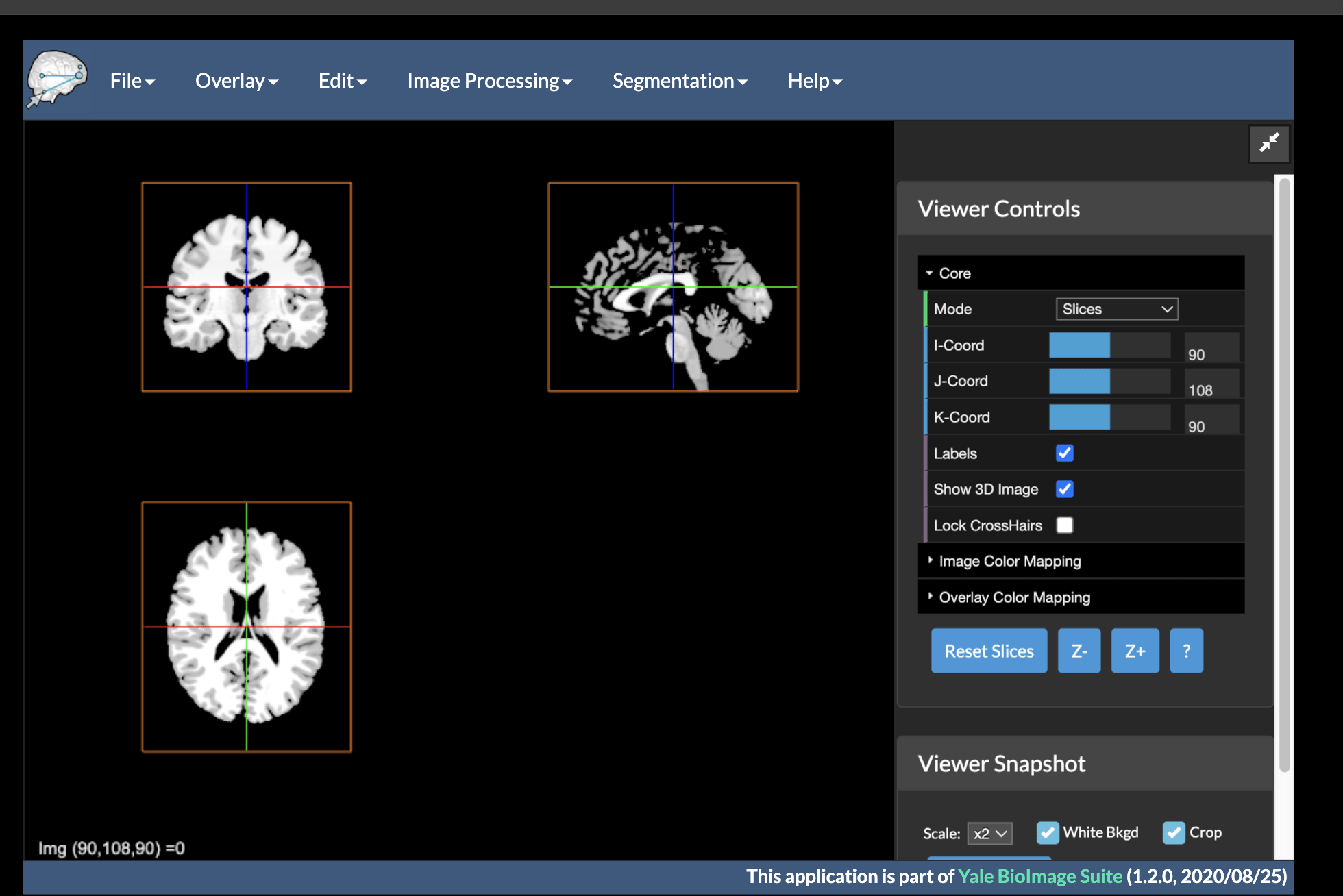
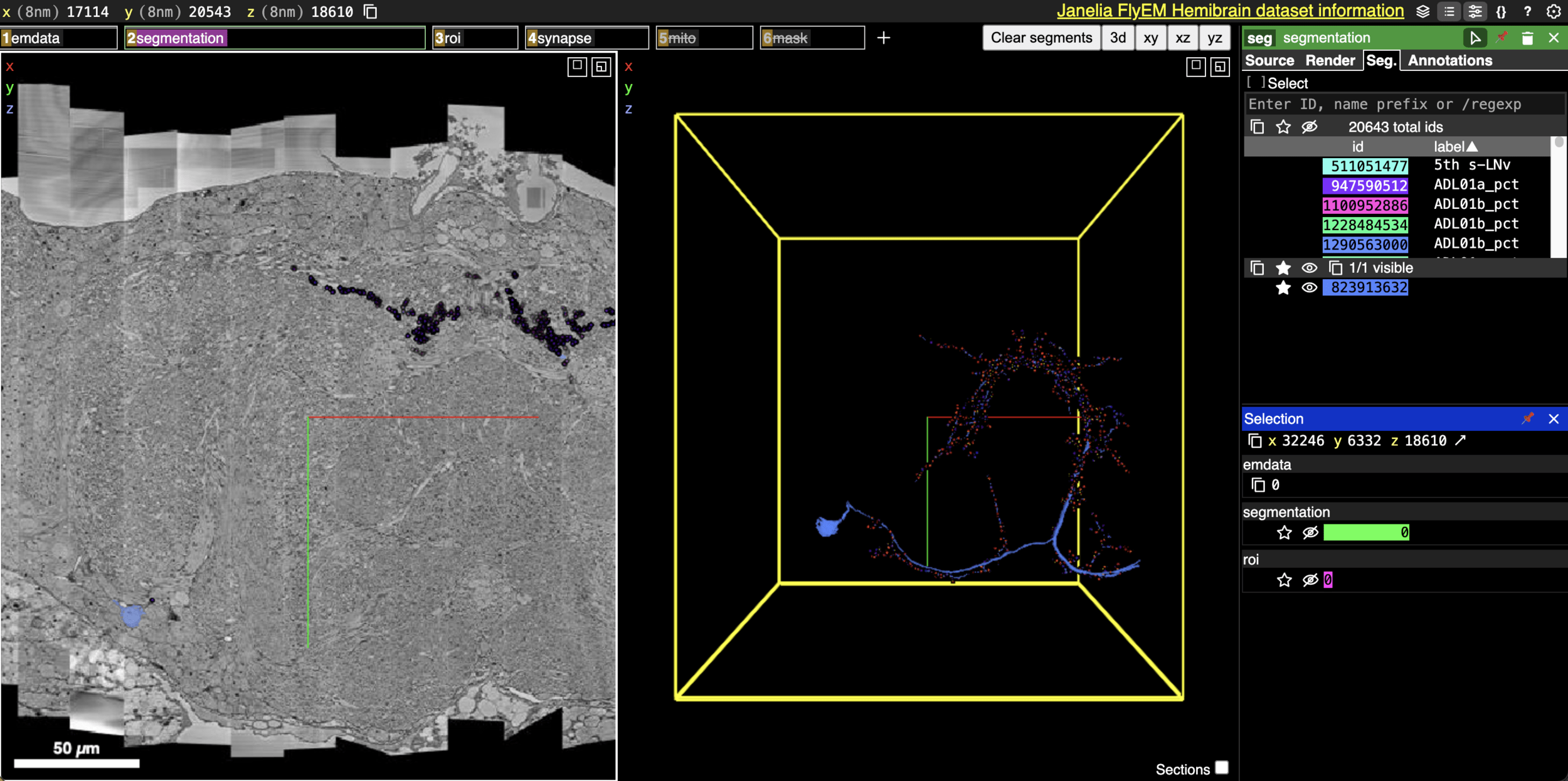
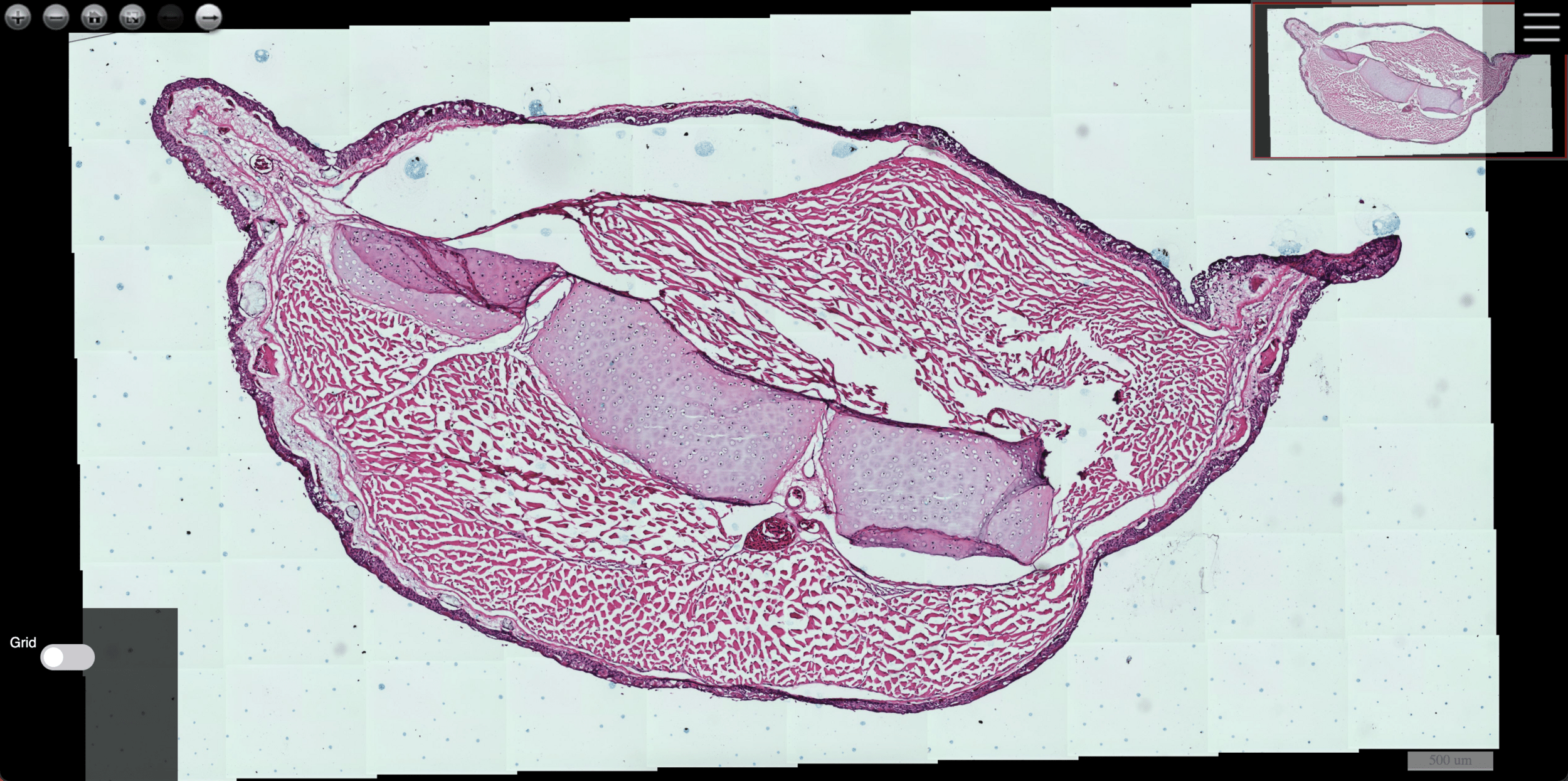
Image Volumes
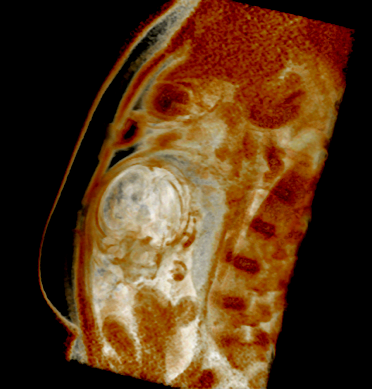
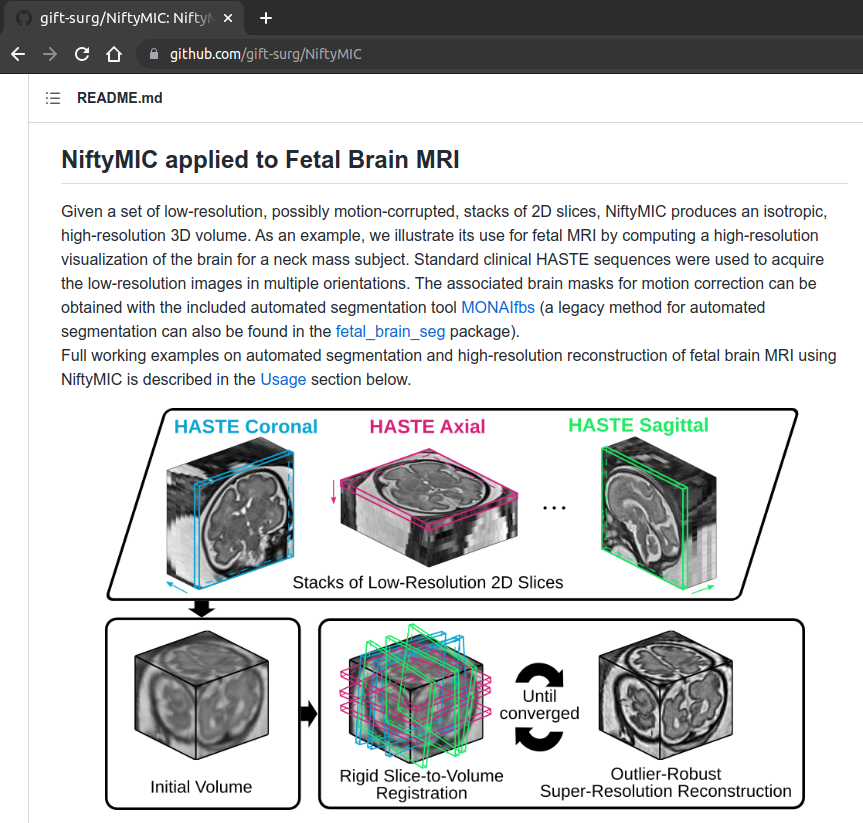
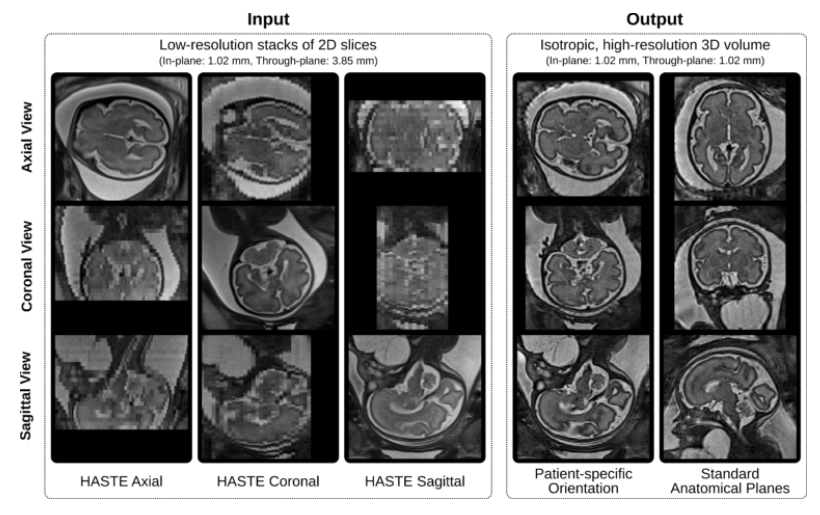
Fetal MRI
2D
3D
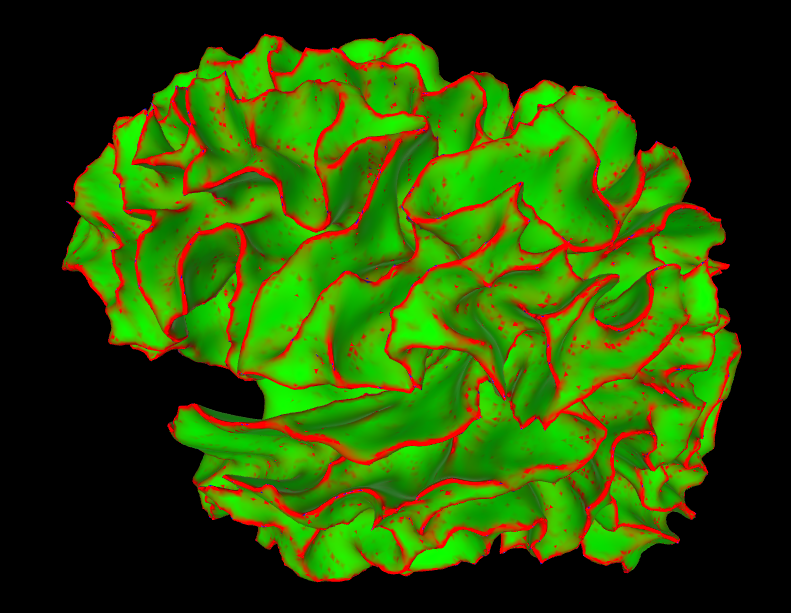
Marching Cubes creates 3D Meshes
Bill Lorensen 1987
Label Maps
R.I.P.
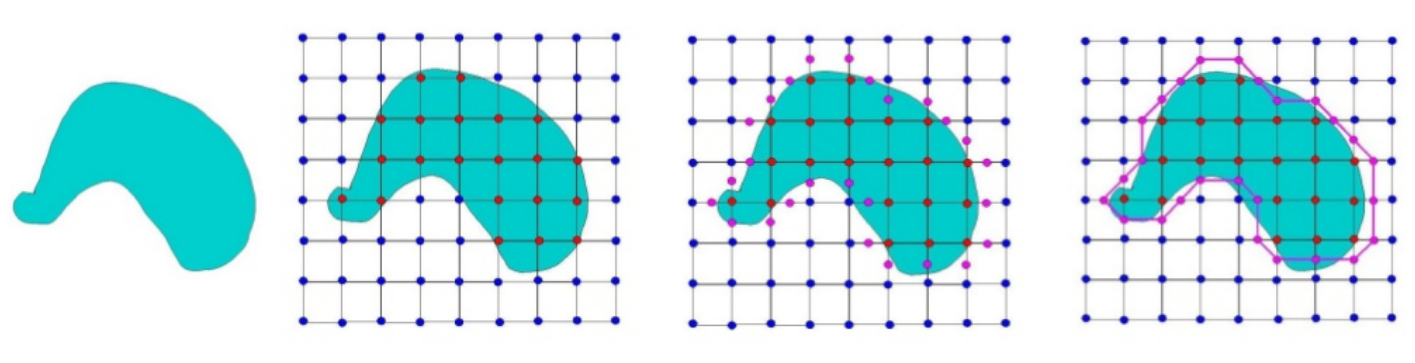
Marching Cubes in 2D
Create triangles to approximate the shape
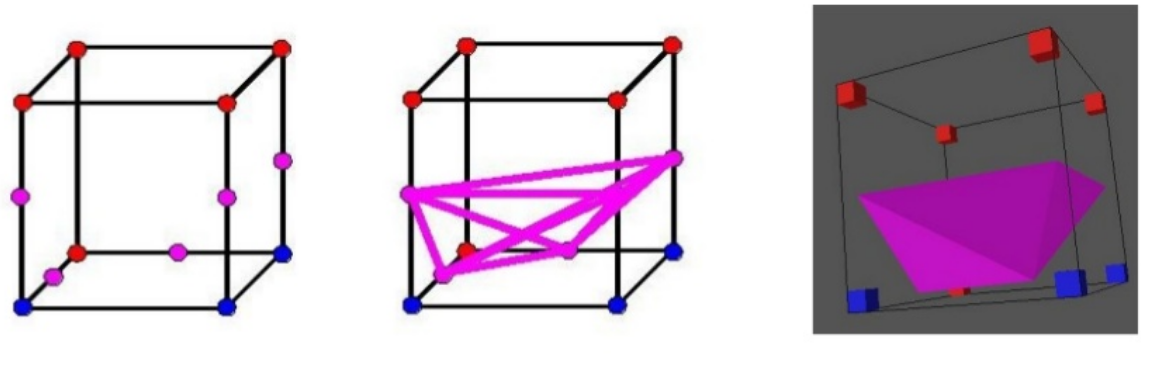
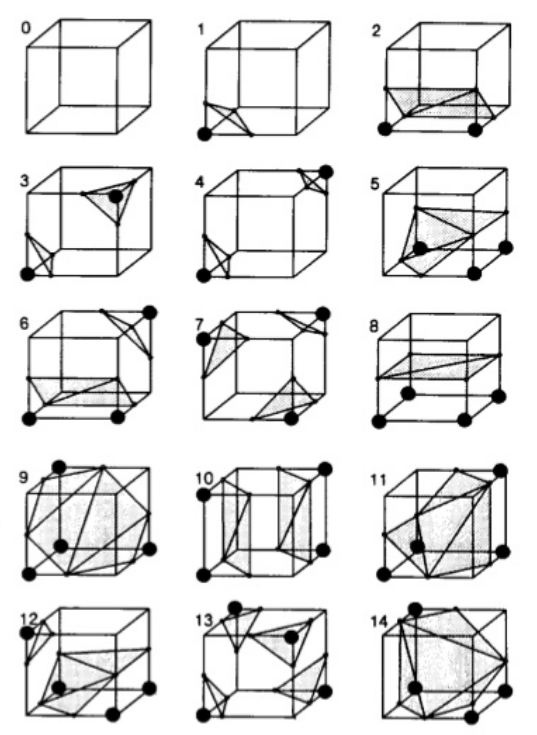
Marching Cubes in 3D
Create triangles to approximate the shape
Outside
Marching Cubes in THREE.js
Marching Cubes in THREE.js
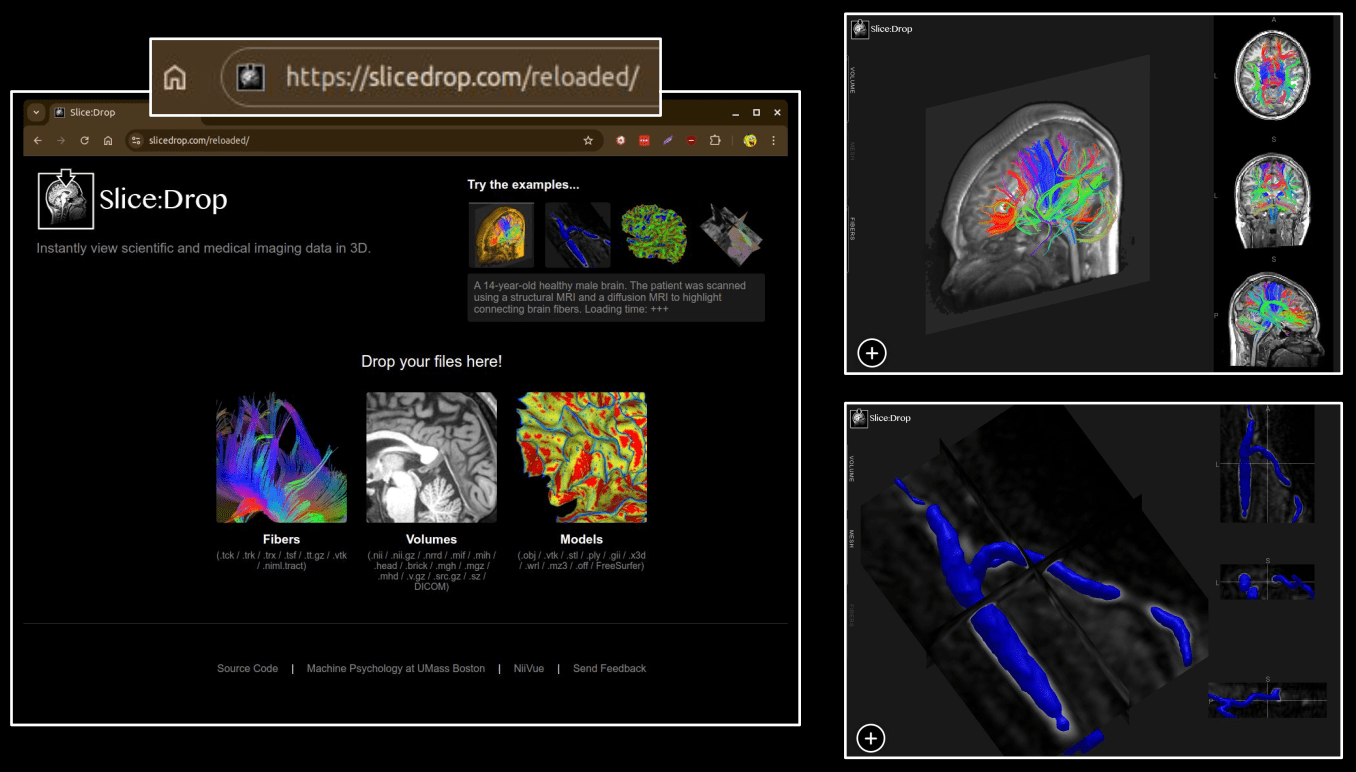
Slice-based Volume Rendering
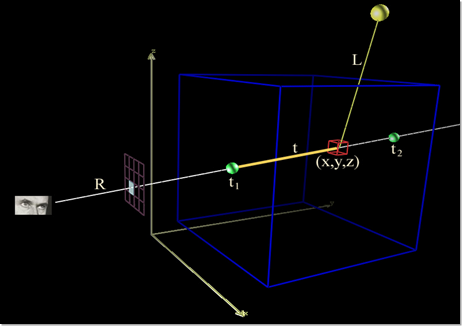
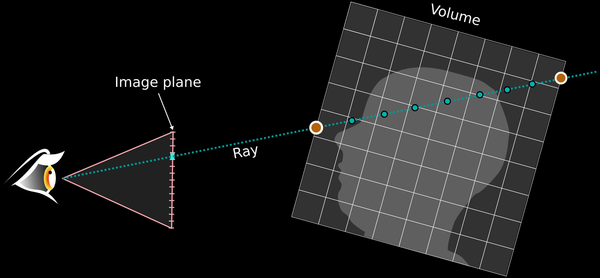
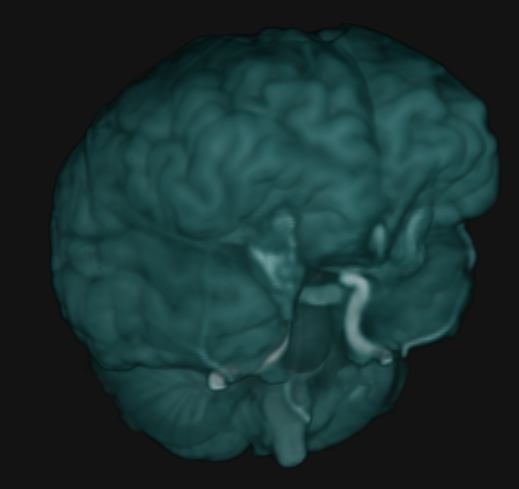
Volume Rendering with Ray Casting
Volume Rendering with Ray Casting
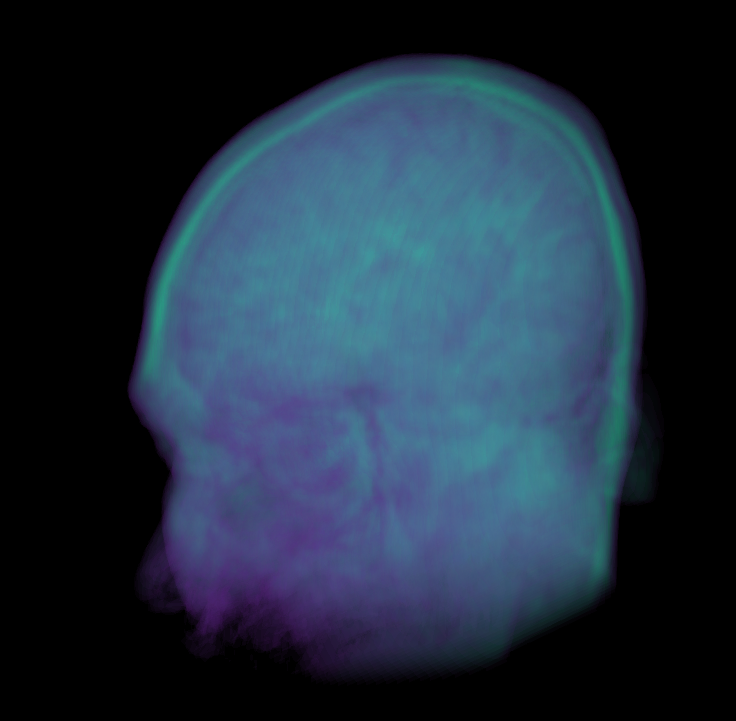
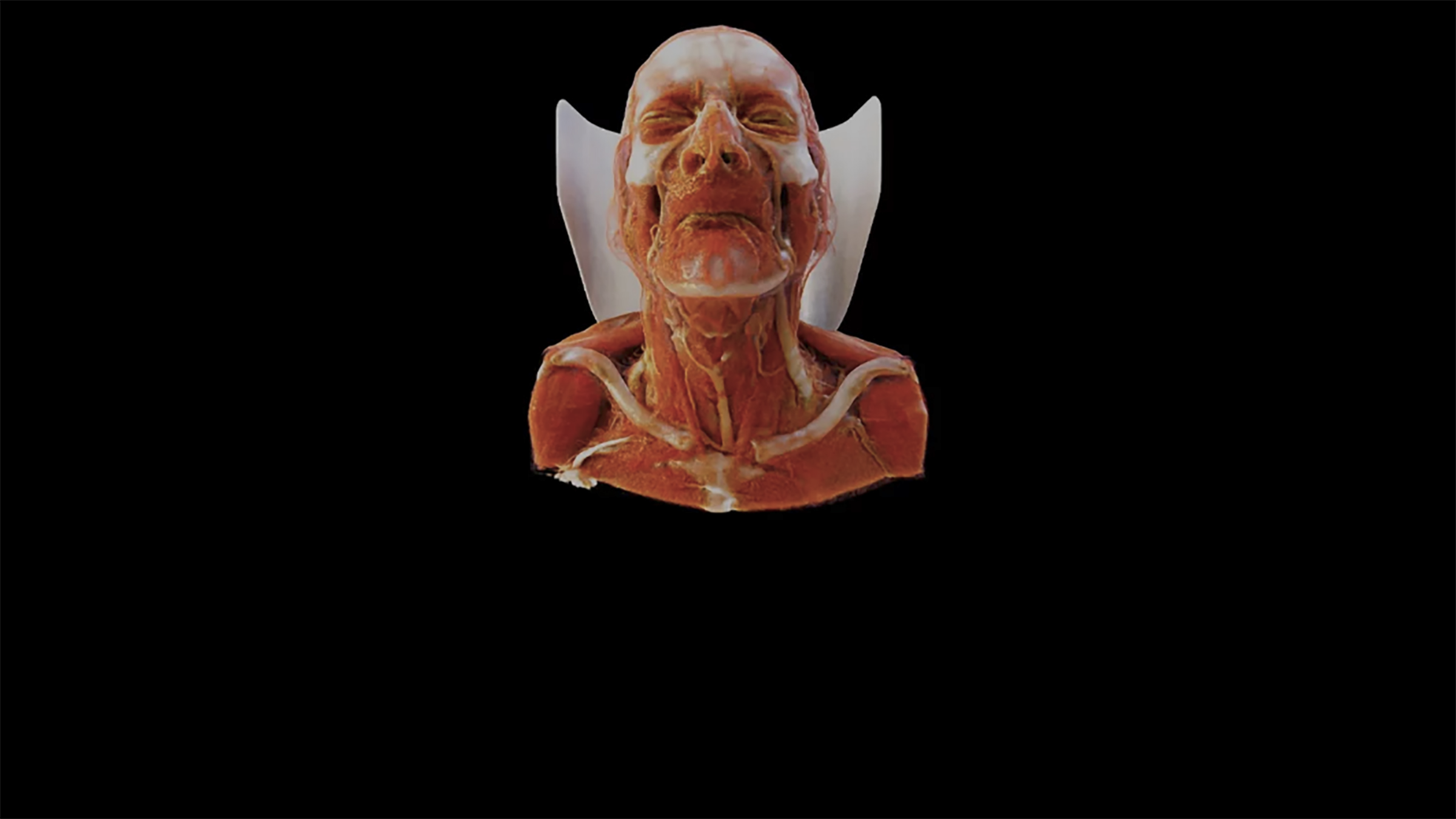
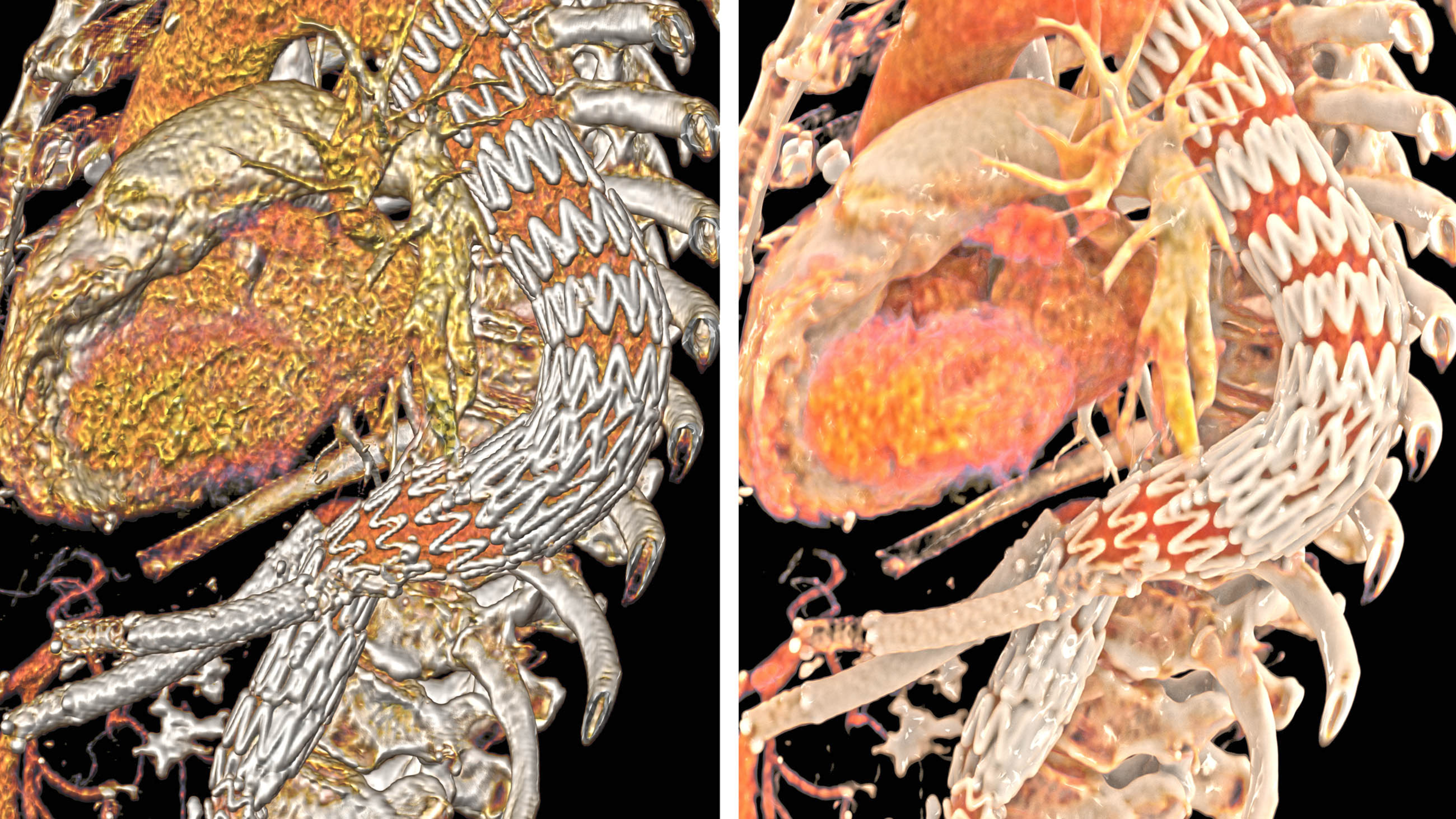
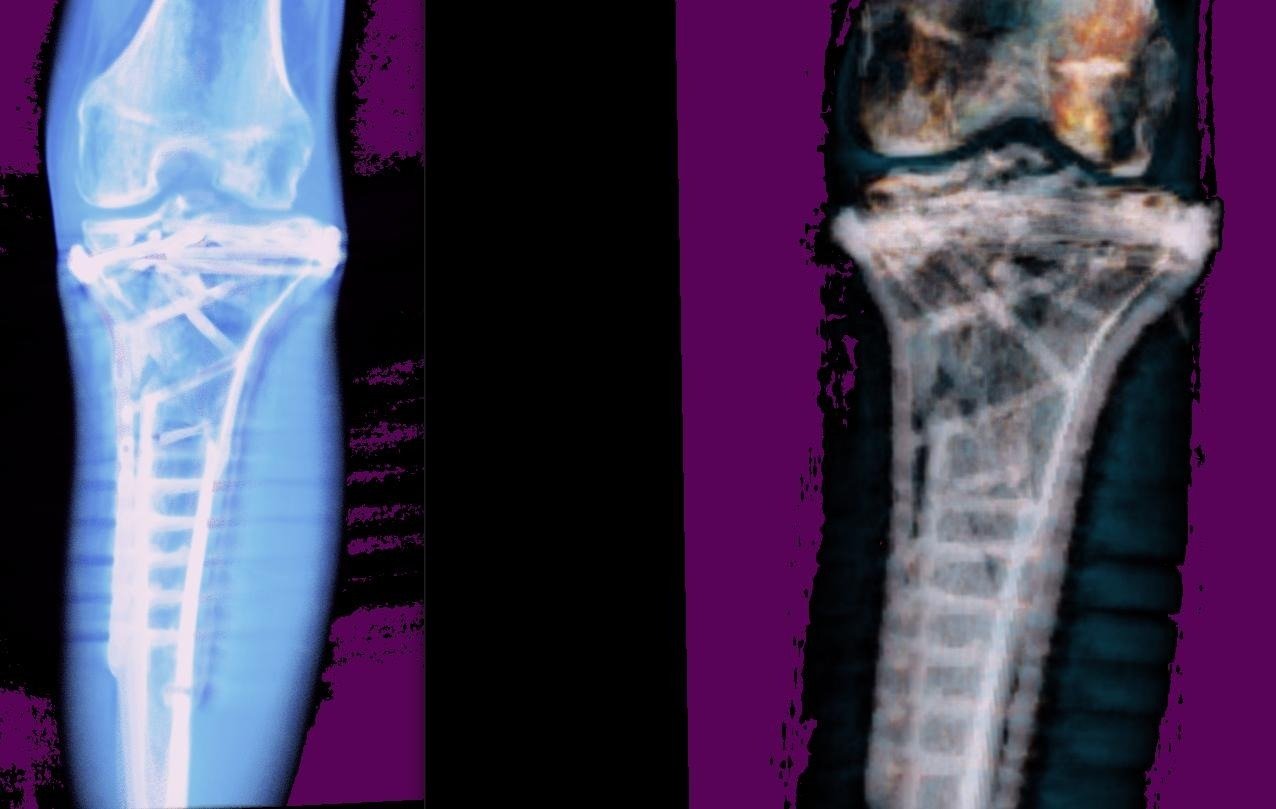
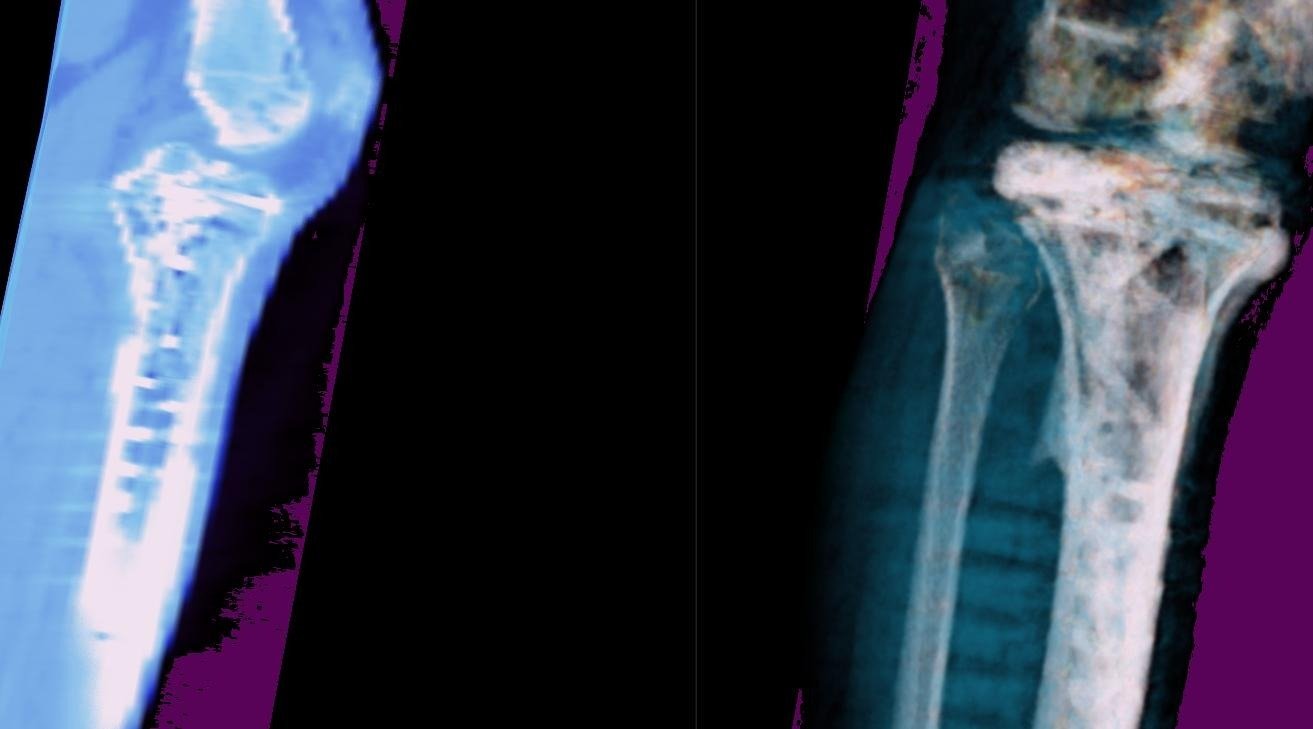
Cinematic Volume Rendering
Coronal
Super-Resolution
Coronal
Super-Resolution
<html>
<head>
<title>NiiVue!</title>
<style>
body {
background-color:#000;
margin: 0;
padding: 0;
height: 100%;
overflow: hidden !important;
}
</style>
<script type="text/javascript" src="https://niivue.github.io/niivue/features/niivue.umd.js"></script>
<script type="text/javascript">
window.onload = function() {
var nv1 = new niivue.Niivue()
nv1.attachTo('gl1')
nv1.setSliceType(nv1.sliceTypeRender)
};
</script>
</head>
<body>
<canvas id='gl1' style='height:100%;width:100%'></canvas>
</body>
</html>submit your music
By Daniel Haehn
Slides for CS460 Computer Graphics at UMass Boston. See https://cs460.orghttps://cs460.org




