Hugo Hadfield
Cambridge University PhD student, Signal Processing and Communications Laboratory
p vectors
q vectors
r vectors
Inner (dot) product
Outer (wedge) product
Algebras for 3D Euclidean space (there are lots more):
Some algebras for non-Euclidean space (there are lots more):
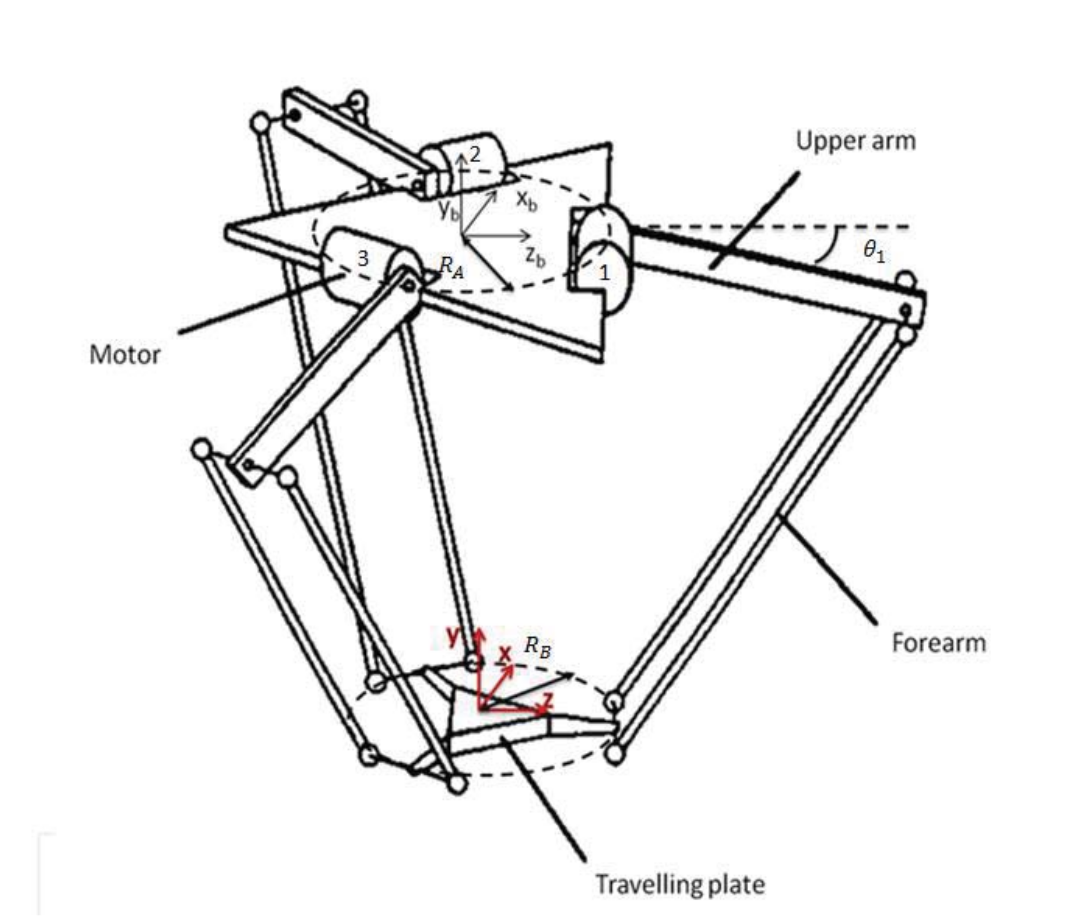
Can we construct a rotor from origin to endpoint?
Construct the base rotors
Construct the first link's translation rotor
Construct the elbow and link 2 translation rotor
The combined rotor is the product of all of them
(If \(P^2 < 0 \) then y is out of reach)
Construct a sphere at the base, \(n_0\)
Construct a sphere at the endpoint, y
Intersect the spheres to give a circle
Define a vertical plane through the endpoint and base
Intersect the circle and the plane to give a point pair
Choose one of the elbow position solutions
\( A \vee B \) is just \( I_5(I_5A \wedge I_5B) \)
\( I_5 = e_1e_2e_3e_4e_5 \)
Get the pseudo-elbow point \(A_i\)
Construct a sphere about the pseudo-elbow
The intersection of the three spheres (one from each limb) correspond to the two possible possitions of the centre of the end plate
By Hugo Hadfield
An introduction to Geometric Algebra from a more traditional computer science perspective. It presents different subalgebras as domain specific programming languages and discusses the various implementation approaches common in the GA community.




