





He Wang PRO
Knowledge increases by sharing but not by saving.
He Wang (王赫)
[hewang@mail.bnu.edu.cn]
Department of Physics, Beijing Normal University
In collaboration with Zhou-Jian Cao
Aug 23rd, 2019
The 23rd KAGRA face-to-face meeting @Toyama
A trigger generator \(\rightarrow\) Efficiency+ Completeness + Informative
Background
Related works
Motivation
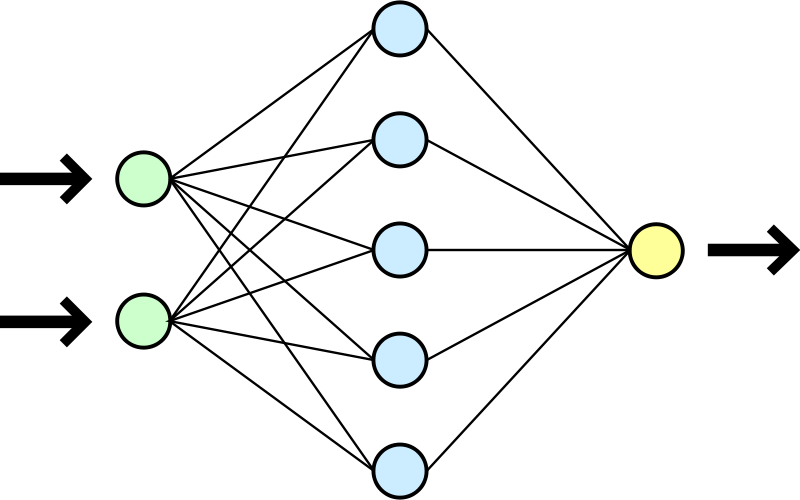
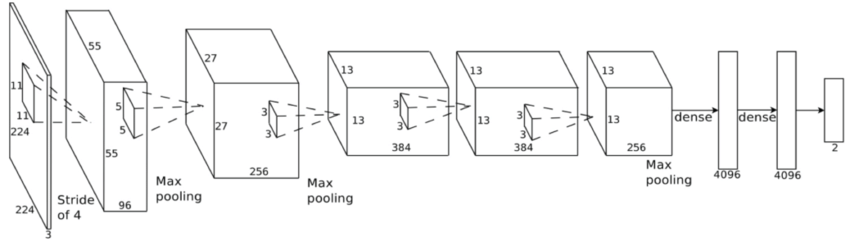
Convolutional neural network (ConvNet or CNN)
Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012)
Matched-filtering (cross-correlation with the templates) can be regarded as a convolutional layer with a set of predefined kernels.
Is it matched-filtering?
Motivation
Matched-filtering (cross-correlation with the templates) can be regarded as a convolutional layer with a set of predefined kernels.
- In practice, we use matched filters as an essential component in the first part of CNN for GW detection.
Convolutional neural network (ConvNet or CNN)
Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012)
Architechture
\(\bar{S_n}(t)\)
\(\bar{S_n}(t)\)
In the meanwhile, we can obtain the optimal time \(N_0\) (relative to the input) of feature response of matching by recording the location of the maxima value corresponding to the optimal template \(C_0\)
Architechture
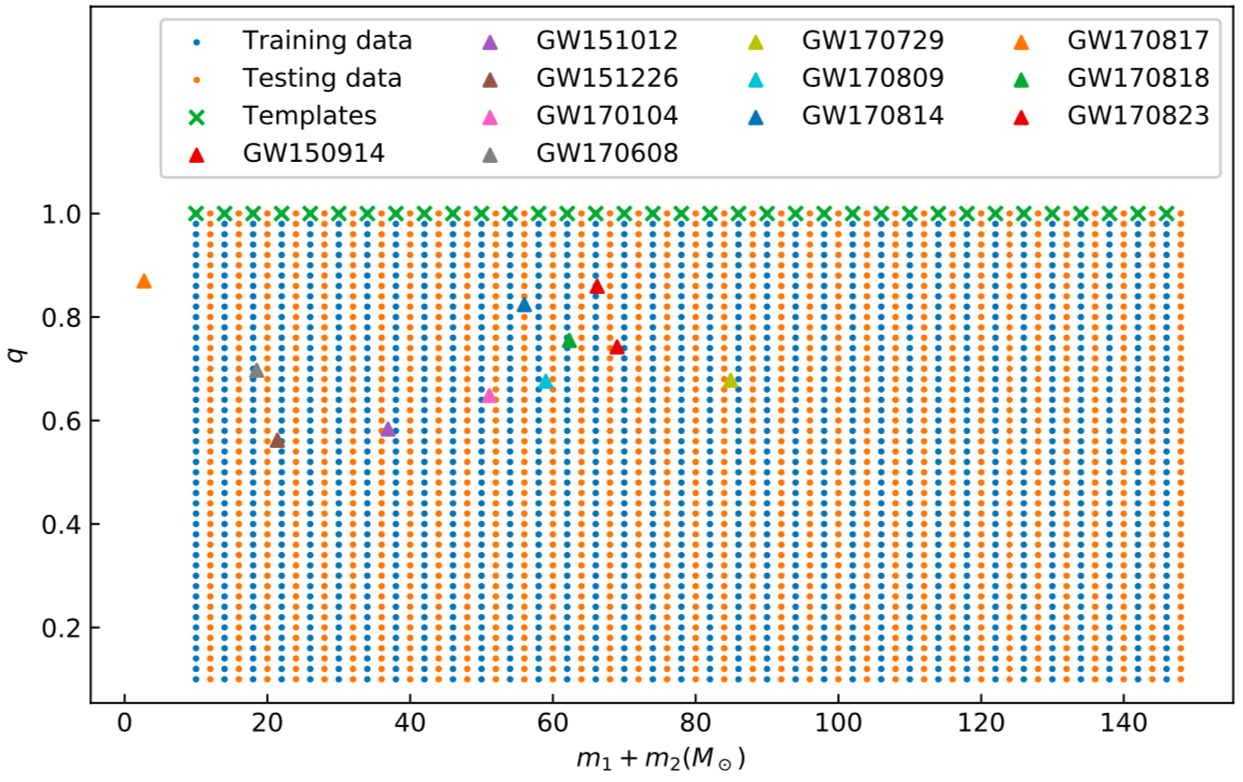
Dataset & Templates
| template | waveform (train/test) | |
|---|---|---|
| Number | 35 | 1610 |
| Length (s) | 1 | 5 |
| equal mass |
(In preprint)
62.50M⊙ + 57.50M⊙ (\(\rho_{amp}=0.5\))
Dataset & Templates
(In preprint)
| template | waveform (train/test) | |
|---|---|---|
| Number | 35 | 1610 |
| Length (s) | 1 | 5 |
| equal mass |
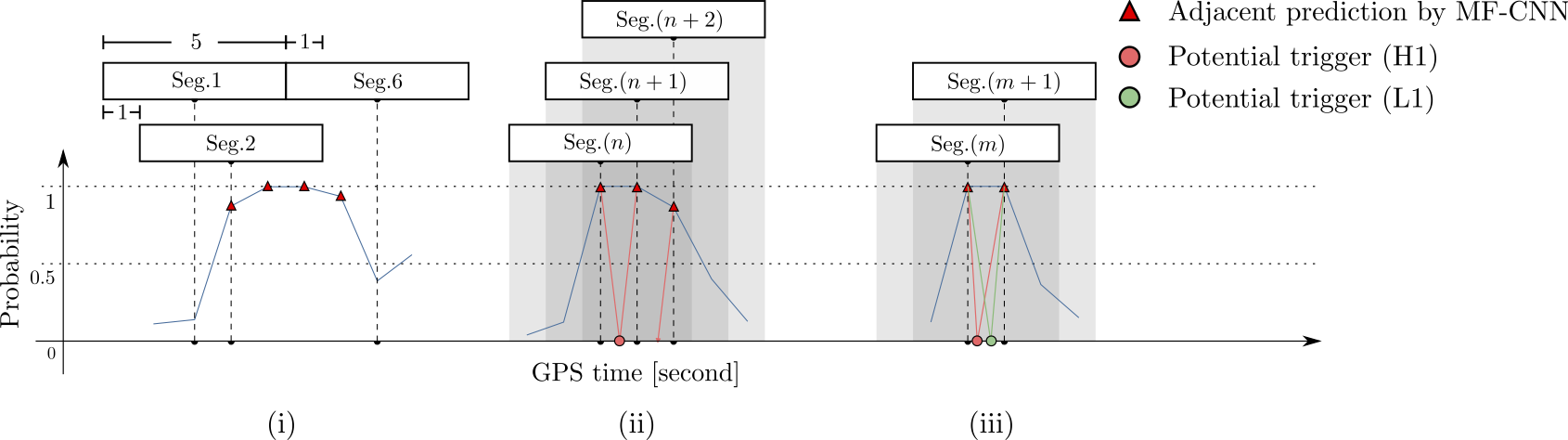
Search methodology
(In preprint)
Search methodology
(In preprint)
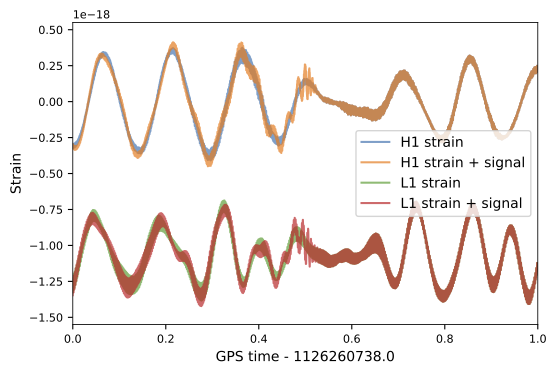
Input
(In progress)
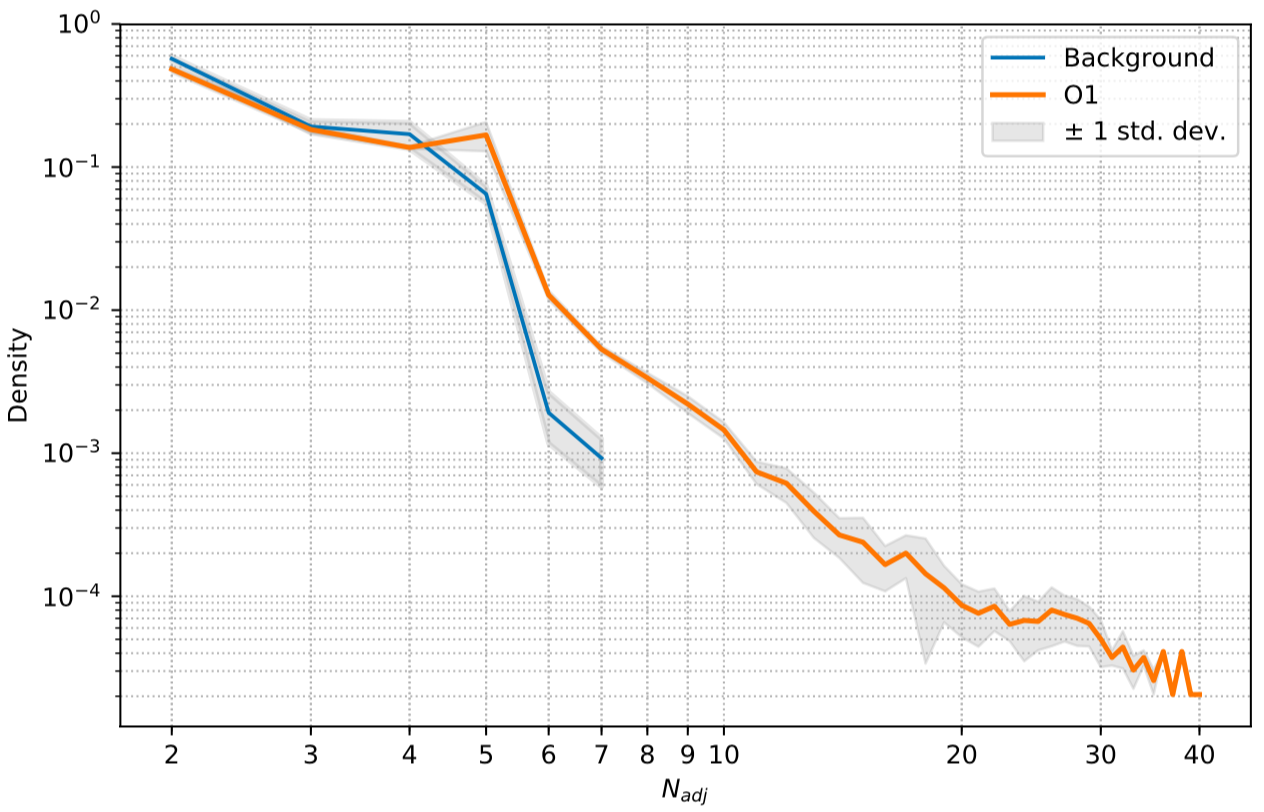
Population property on O1
Detection ratio
Number of Adjacent prediction
(In progress)
Population property on O1
Detection ratio
Number of Adjacent prediction
a bump at 5 adjacent predictions
(In preprint)
(In preprint)
Some benefits from MF-CNN architechure
Simple configuration for GW data generation
Almost no data pre-processing
Easy parallel deployments, multiple detectors can be benefit a lot from this design
Some benefits from MF-CNN architechure
Simple configuration for GW data generation
Almost no data pre-processing
Easy parallel deployments, multiple detectors can be benefit a lot from this design
Thank you for your attention!
By He Wang
KAGRA F2F meeting @ Toyama (Aug 23rd, 2019) - 15min




