2. Mai 2000
0
4
0
0
:
(UTC)
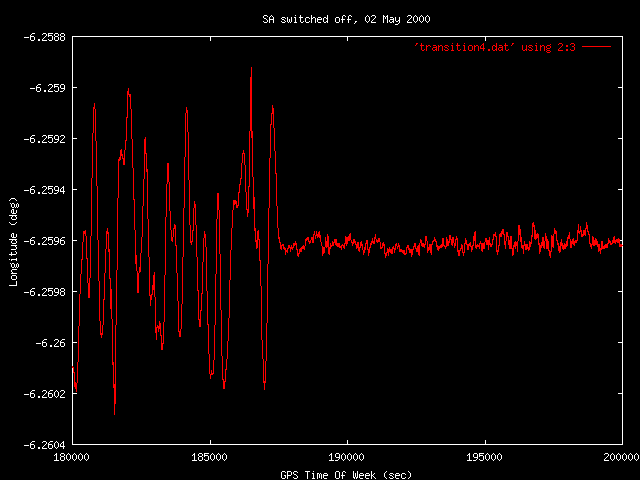
~100m
~10m
GPS
Satellitennavigation
Inhalt
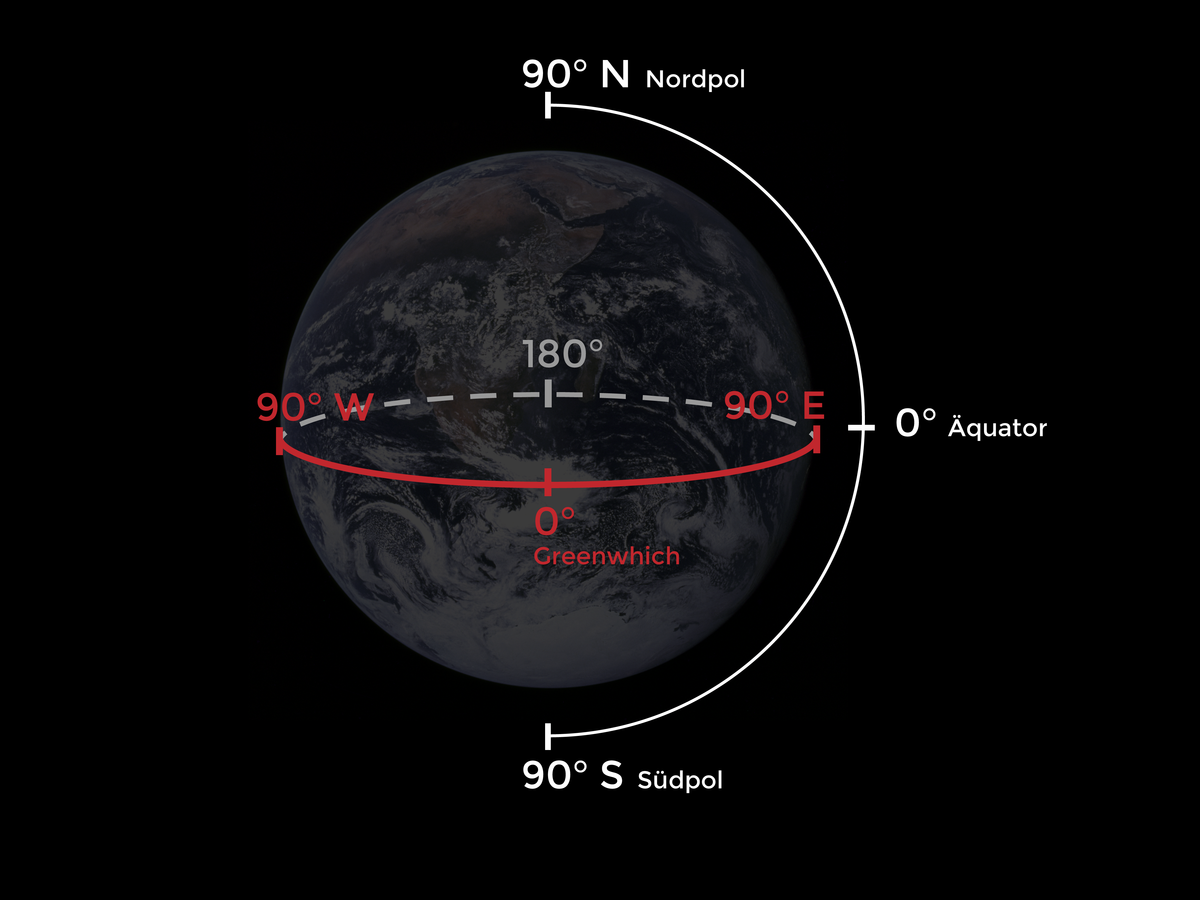
- Koordinatensystem
- GPS-Satelliten
- GPS-Signale
- GPS-Fix
- Genauigkeit
- Andere Systeme
Position
O(0|0)
\times
\times
P(2|1.5)
Positionsbestimmung
Bestimmung von Abstand und Richtung eines Punktes zu einem bekannten Ursprung
Bühl
48° N, 8° E
Alaska
64° N, 150° W
Sydney
33° S, 151° E
GPS
Space Segment
Control Segment
User Segment
GPS-Satelliten
Bodenstationen
GPS-Empfänger
h=26\text{ }600\text{ km}
T=11\text{ h, } 58\text{ min}
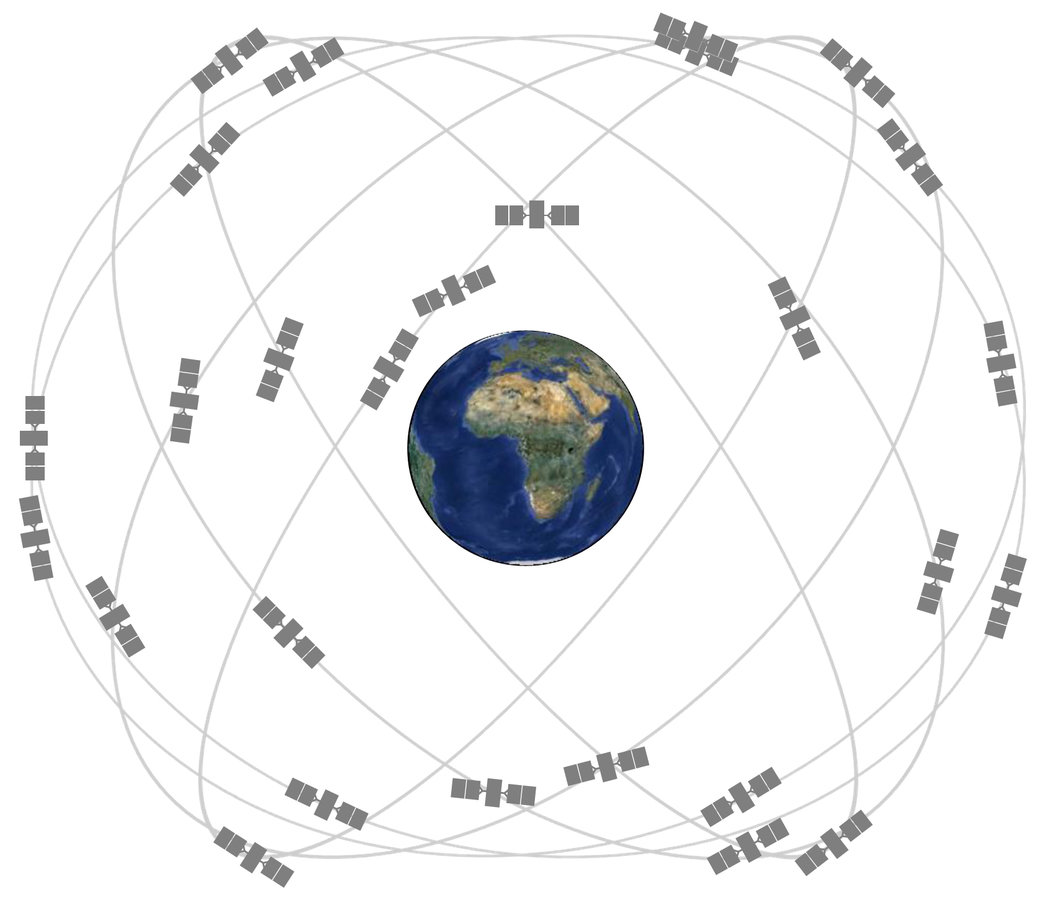
Mindestens 24 Satelliten
Von jedem Punkt min. 4
30 Satelliten
Von jedem Punkt 9-11
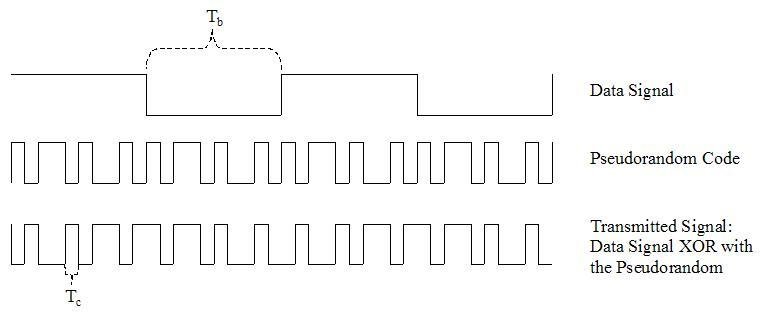
Modulation



1 1 0 1 1 0 0 1 0 0

Amplitudenmodulation
- Anpassen der Amplitude an das Datensignal
- Mittelwellenradio

Binary Phase Shift Keying
- Phasenverschiebung der Trägerwelle um
- Nur digitale Daten
\frac{\lambda}{2}
f_{L1}=1.57542 \text{ GHz}
CDMA
Code Division Multiple Access
| A | B | A XOR B |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 1 | 0 |
Exklusives Oder (XOR)
A\oplus{}B
C/A-Code
Coarse Acquicition ("Grobe Erfassung")
110010000011...PRNG
S,V
1023 Chips
1,023 MChip/s
Wiederholung nach 1ms
SV = {
1: [2,6],
2: [3,7],
3: [4,8],
# ...
}
def shift(register, feedback, output):
out = [register[i-1] for i in output]
if len(out) > 1:
out = sum(out) % 2
else:
out = out[0]
fb = sum([register[i-1] for i in feedback]) % 2
for i in reversed(range(len(register[1:]))):
register[i+1] = register[i]
register[0] = fb
return out
def ca(svn=1):
G1 = [1 for i in range(10)]
G2 = [1 for i in range(10)]
ca = []
for i in range(1023):
g1 = shift(G1, [3, 10], [10])
g2 = shift(G2, [2, 3, 6, 8, 9, 10], SV[svn])
ca.append((g1 + g2) % 2)
return caNavigationsnachricht
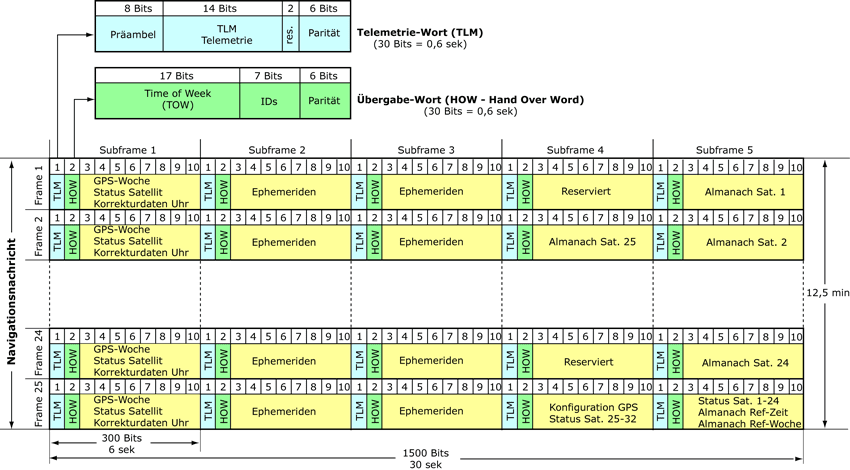
- Präambel
- GPS-Woche (Wochen seit 22.08.1990)
- Zeit in der aktuellen Woche (6s-Schritte)
- Bahndaten der Satelliten
- Korrekturinformationen (Erdathmosphäre, Uhrzeit, etc.)
- Differenz GPS-Zeit zu UTC
50 Bit/s
1 Bit dauert 20 ms (20 C/A-Codes)
GPS-Fix
GPS-Signal auf der Erde
- Sehr schwach
- Überlagern der Satelliten
Autokorrelation


Empfangenes Signal
Interner C/A-Code
Empfangen: 1
Intern: 1
1
Empfangen: 0
Intern: 1
0
Empfangen: 1
Intern: 0
0
\sum \text{ intern} \cdot \text{empfangen}
Zeitverschiebung
C/A-Code wiederholt sich nach 1ms
Frequenzverschiebung
Satelliten bewegen sich mit 3,9km/s
Durch Doppler-Effekt
\pm 6\text{ kHz}
Nicht sichtbarer Satellit
Von 32 nur 9-11 sichtbar
t_i

Code negiert
Bitwechsel
\Delta{}t=12\text{ ms}
- Beginn eines Subframe (alle 0,6s)
- Beginn eines Frames (alle 6s)
- Lesen von GPS-Zeit
- Lesen von GPS-Woche
t_i
Für Signale jedes Satelliten
mindestens 4
t_1,t_2,t_3,t_4,...,t_n
Lesen der Bahndaten aus der Navigationsnachricht
Für jeden Satelliten
i
- Sendezeitpunkt
- Position zum Sendezeitpunkt
t_i
x_i,y_i,z_i
(x_i - x_0)^2 + (y_i - y_0)^2 + (z_i - z_0)^2 = (c\cdot(t_0-t_i))^2
(x_1 - x_0)^2 + (y_1 - y_0)^2 + (z_1 - z_0)^2 = (c\cdot(t_0-t_1))^2
(x_2 - x_0)^2 + (y_2 - y_0)^2 + (z_2 - z_0)^2 = (c\cdot(t_0-t_2))^2
(x_3 - x_0)^2 + (y_3 - y_0)^2 + (z_3 - z_0)^2 = (c\cdot(t_0-t_3))^2
(x_4 - x_0)^2 + (y_4 - y_0)^2 + (z_4 - z_0)^2 = (c\cdot(t_0-t_4))^2
4 Unbekannte, 4 Gleichungen
P(x_0|y_0|z_0)
t_0
Zum Zeitpunkt
War ich
Kaltstart
Keine/veraltete Informationen
Mehrere Minuten
Warmstart
Ungefähre Position bekannt
30-60s
Heißstart
Bekannte Daten bis zu 6h alt
Unter 10s
Korrekturen
- Relativistische Effekte
- Licht ist in Medium (Athmosphäre) kleiner
- Ionosphäre
Geschwindigkeit
Spezielle Relativitätstheorie
Schwerkraft
Allgemeine Relativitätstheorie
45 µs / Tag schneller
7 µs / Tag langsamer
38 µs / Tag schneller
38 µs entspricht 10 km

GPS

GLONASS
Galileo
Beidou
gps.leonadi.de
GPS
By Leon Bentrup
GPS
Sattelitennavigation. GFS Physik 2015



