MASSIF control software stack:
leveraging latest ESRF developments and new insights
MXCuBE meeting, 1st of June 2015 - Helmholtz-Zentrum Berlin (HZB)
Matias Guijarro
Software Engineer @ Beamline Control Unit
European Synchrotron Radiation Facility
Grenoble, France
MASSIF (UPBL10), high-throughput MX sample characterization

ID30B
ID30A3
ID30A2
ID30A1
MASSIF (UPBL10), high-throughput MX sample characterization
ID30A-1

Dectris Pilatus 3 2M detector
Prosilica GC655C on-axis viewer
Oxford 700 cryo stream controller
Keithley 6485 picoammeter for diodes reading
Icepap-driven slits motors
Icepap-driven rotating fast shutter
+ a lot of Wago-controlled actuators
MASSIF (UPBL10), high-throughput MX sample characterization
ID30A-1

Staubli arm used both as sample changer and goniometer
Oscillation synchronisation done with ESRF MUSST card (Ethernet GPIB)
All axis are Icepap-driven
MASSIF (UPBL10), high-throughput MX sample characterization
ID30A-1

"Big dewar"
3 cells of 8 pucks, 10 SPINE samples each: 240 samples
1 Icepap-driven axis for cell selection
Keyence cameras for detection
Wago modules for operation
MASSIF (UPBL10), high-throughput MX sample characterization
ID30A-3
Dectris Pilatus 3 2M (will be replaced by Eiger 4M, when Eiger will be ready)
KB mirror with NF8753-driven motors
MD2M diffractometer (MD2 little brother with Icepap-driven axes, Galil DMC213-driven axis for omega)
EMBL SC3 sample changer
Other parts are similar to ID30A-1

MASSIF (UPBL10), high-throughput MX sample characterization
ID30B, collaboration with

Dectris Pilatus 6M
Tunable wavelength, fluorescence detector
Bended single mirror, IcePAP driven
MD2S diffractometer (latest EMBL development)
EMBL SC3 sample changer + new EMBL sample changer and plate robot
ESRF Big Dewar
MASSIF software components map
Perfection is achieved, not when there is nothing more to add, but when there is nothing left to take away.
Antoine de Saint-Exupéry

We don't need
MAGIC
Configuring with Beacon
M. Guijarro, S. Petitdemange
Beacon, brilliant Beamline Configuration
Client/server architecture
Objects configuration repository
Settings cache based on
Channels: peer-to-peers data exchange between Beacon clients
Distributed Lock Manager
Drop-in replacement for Tango database (experimental)

Beacon objects configuration repository
A set of .yml files organized in directories
A file can contain multiple objects
Each object must have an unique name
Beacon objects configuration repository
bacon:~/local/beamline_control/configuration % tree
.
├── calibrated_diodes.dat
├── eh
│ ├── bpms.yml
│ ├── detector_cover.yml
│ ├── fshutter.yml
│ ├── i0i1.yml
│ ├── __init__.yml
│ ├── MD2S.yml
│ ├── motors
│ │ ├── DtoX.yml
│ │ ├── ehtable.yml
│ │ ├── fshut.yml
│ │ ├── __init__.yml
│ │ ├── mirror.yml
│ │ ├── slitbox.yml
│ │ └── ss2lits.yml
│ ├── musst.yml
│ ├── tango_shutters.yml
│ ├── transmission.yml
│ └── wagos.yml
├── __init__.yml
├── oh
│ ├── bpms.yml
│ ├── frontend.yml
│ ├── __init__.yml
│ ├── mbv1_diode.yml
│ ├── monocal_diode.yml
│ ├── motors
│ │ ├── energy_wl.yml
│ │ ├── __init__.yml
│ │ ├── mono.yml
│ │ ├── pslits.yml
│ │ ├── ss1lits.yml
│ │ ├── transfocator.yml
│ │ └── undulators.yml
│ ├── transfocator.yml
│ └── wagos.yml
├── percent.arr
└── undulators.dat
name: tfmad
class: transfocator
controller_ip: 160.103.50.57
lenses: 7
pinhole: 2
>>> from beacon import static
>>> cfg = static.get_config()
>>> tfmad = cfg.get("tfmad")
>>> tfmad
filename:<tfmad.yml>,plugin:None,{'controller_ip': '160.103.50.57', 'pinhole': 2, 'name': 'tfmad', 'lenses': 7, 'class': 'transfocator'}
>>> tfmad["lenses"]
7
>>> tfmad["lenses"] = 6
>>> tfmad.save()
Beacon objects configuration repository
Objects are singletons
By default, a dict-like object is returned
The plugin key allow to specify particular functions for object instantiation
- compatible with any library
Setting keys in __init__.yml assign properties to a whole set of objects in a directory
Beacon settings cache
Beacon client API offers various Settings objects
Settings are a thin helper layer on top of Redis structures
>>> from beacon import settings
>>> d = settings.HashSetting("example")
>>> d
<HashSetting name=example value={}>
>>> d["foo"]="bar"
>>> d
<HashSetting name=example value={'foo': 'bar'}>
>>>
linguijarro:~ % redis-cli
127.0.0.1:6379> keys *
1) "example"
127.0.0.1:6379> hgetall example
1) "foo"
2) "bar"
127.0.0.1:6379>
Server-side
Client-side
Beacon channels
Peer-to-peers data exchange between clients connected to the same beacon server
Serialization with standard "pickle" Python module
Designed for small amount of data, ie. states, scalar values, simple strings
Under the hood: nanomsg (SURVEY and BUS scalability protocols)
+ gevent
Beacon channels example
Client A
>>> from beacon import channels
>>> c = channels.Channel("test", "hello, world")
>>> c.value
'hello, world'
>>>
Client B
>>> from beacon import channels
>>> c = channels.Channel("test")
>>> c.value
'hello, world'
>>> c.value = 42
>>>
>>> c.value
42Client C
>>> from beacon import channels
>>> c = channels.Channel("test")
>>> c.value
42
>>> c.value = "unlimited power">>> c.value
'unlimited power'Positioning with the ESRF Motion (Emotion) library
C. Guilloud, M. Guijarro, M. Perez

Emotion features

- 4 well-defined base classes: Controller, Axis, Group & Encoder
- powered by gevent
- Virtual (pseudo) axes
- State of the art control: software limits, user positions, backlash handling, smooth stopping, stepper motors under-resolution move compensation
- Events
- Easy to configure, multiple back-ends support
- Mockup object for simulation / testing
- Unit tests suite, 70% code coverage
- Comes with a generic Tango server
Default back-end is XML
Beacon back-end
- integration with full beamline configuration
- Beacon plugin to get Emotion objects from Beacon
Emotion configuration with Beacon
controller:
class: IcePAP
host: iceid306
axes:
-
name: DtoX
address: 26
steps_per_unit: 80
velocity: 125
acceleration: 500>>> from beacon import static
>>> cfg = static.get_config()
>>> dtox = cfg.get("DtoX")
>>> dtox
<emotion.axis.Axis object at 0x2729190>
>>> dtox.position()
700.0
>>> dtox.acceleration()
500.0
>>> dtox.velocity()
250.0
bacon:~/local/beamline_control/configuration % tree
.
├── calibrated_diodes.dat
├── eh
│ ├── bpms.yml
│ ├── detector_cover.yml
│ ├── fshutter.yml
│ ├── i0i1.yml
│ ├── __init__.yml
│ ├── MD2S.yml
│ ├── motors
│ │ ├── DtoX.yml
│ │ ├── ehtable.yml
│ │ ├── fshut.yml
│ │ ├── __init__.yml
│ │ ├── mirror.yml
│ │ ├── slitbox.yml
│ │ └── ss2lits.yml
│ ├── musst.yml
│ ├── tango_shutters.yml
│ ├── transmission.yml
│ └── wagos.yml
├── __init__.yml
├── oh
│ ├── bpms.yml
│ ├── frontend.yml
│ ├── __init__.yml
│ ├── mbv1_diode.yml
│ ├── monocal_diode.yml
│ ├── motors
│ │ ├── energy_wl.yml
│ │ ├── __init__.yml
│ │ ├── mono.yml
│ │ ├── pslits.yml
│ │ ├── ss1lits.yml
│ │ ├── transfocator.yml
│ │ └── undulators.yml
│ ├── transfocator.yml
│ └── wagos.yml
├── percent.arr
└── undulators.dat
plugin: emotionEmotion Virtual Axes
Example: 2-leg table, can translate and rotate
controller:
class: tabsup
d1: 730
d2: 1208
axes:
-
name: $tyf
tags: real front
-
name: $tyb
tags: real back
-
name: ttrans
tags: ttrans
-
name: tzrot
tags: trotConfiguration (Beacon)
$ indicates a reference to another object
from emotion import CalcController
import math
class tabsup(CalcController):
def __init__(self, *args, **kwargs):
CalcController.__init__(self, *args, **kwargs)
self.d1 = self.config.get("d1", float)
self.d2 = self.config.get("d2", float)
def calc_from_real(self, positions_dict):
tyf = positions_dict["front"]
tyb = positions_dict["back"]
d1 = self.d1
d2 = self.d2
return {"ttrans": (d1*tyb+d2*tyf)/(d1+d2),
"trot": math.degrees(math.atan((tyf-tyb)/(d1+d2))) }
def calc_to_real(self, axis_tag, positions_dict):
ttrans = positions_dict["ttrans"]
trot = positions_dict["trot"]
d1 = self.d1
d2 = self.d2
return {"back": ttrans - d2*math.tan(math.radians(trot)),
"front": ttrans + d1*math.tan(math.radians(trot)) }Supported motor controllers
Hardware
PI E517, PI E712, PI E753
Galil DMC 213
PMD 206
NewFocus 8753
FlexDC
IcePAP
Virtual
Slits
KB mirror
2-leg table
3-leg table
Energy
Software
Tango Undulator
MD2 Exporter (for MD2 motors)
PiezoJack
Add new controllers easily
# mandatory methods
def initialize_axis(axis)
def start_one(motion)
def stop(axis)
def state(axis)
def read_position(axis)# optional
def read_velocity(axis)
def set_velocity(axis)
def read_acceleration(axis)
def set_acceleration(axis, new_acc)
def set_position(axis, new_position)
def start_all(motion)
def stop_all()
def set_on(axis)
def set_off(axis)
def initialize_encoder(encoder)
def read_encoder(encoder)
def set_encoder(encoder, new_value)
def home_search(axis)
def home_set_hardware_position(axis, home_pos)
def home_state(axis)
def limit_search(axis, limit)MASSIF beamlines are the first ESRF beamlines without spec

MXCuBE is the main software for users
But...
What about beamline commissioning ?
Doing calibration and alignment procedures ?
Testing the beamline ?
Introducing
K _ _ _ _ s
A. Beteva,
M. Guijarro,
S. Petitdemange
Khoros, MASSIF sequencer and beamline control software
Beamline components
Scanning
Sequences
- Python functions
- Helpers: cleanup context manager, Task abstraction
- Step by step: timescan, "ascan", "dscan", "a2scan", "d2scan"
- Data Manager, writes different file formats (spec, HDF5, ...)
- High-level objects (actuator, shutter, diffractometer, pixel detector, etc.)
- Configuration with Beacon (Khoros Beacon plugin)
- Counters & measurement groups
- Motors via Emotion
Khoros library
>>> from khoros import setup
>>> setup("/home/guijarro/local/test_setup.py")
Reading setup file '/home/guijarro/local/test_setup.py`
Initializing 'i0`
Initializing 'm0`
Initializing 'm1`
Done.
True
>>> DEFAULT_OFFSET
0.0
>>> add(3,6)
9
>>> m0.move(1)
>>> m0.position()
1.0
>>> ascan(m0,1,2,10,0.1,i0)
>>> last_scan_data()
array([[ 1. , 0.375 ],
[ 1.11111111, 5.625 ],
[ 1.22222222, -7. ],
[ 1.33333333, 8.625 ],
[ 1.44444444, -25.5 ],
[ 1.55555556, 0.125 ],
[ 1.66666667, -8.125 ],
[ 1.77777778, 2.28571429],
[ 1.88888889, -3.125 ],
[ 2. , 10.625 ]])
>>>
# Khoros setup file
# -----------------
# nothing is imported by default,
# let's import basic scans
from khoros.core.scans import *
# basically any Python code can be
# imported; objects goes to the
# 'setup_globals' namespace.
# When setup is executed from the
# interpreter, objects are exposed in
# the global namespace too
# for demonstration purpose let's
# define some functions
def double(n):
return 2*n
def add(x,y):
return x+y
# Beamline components are loaded prior
# to setup file execution, so it's
# possible to use beamline components here:
DEFAULT_OFFSET = m0.position()
test_setup.py
Khoros Beamline Components
from khoros.core.measurement import CounterBase, AverageMeasurement
import PyTango.gevent
import time
class tango_attr_as_counter(CounterBase):
def __init__(self, name, config):
CounterBase.__init__(self, name)
tango_uri = config.get("uri")
self.__control = PyTango.gevent.DeviceProxy(tango_uri)
self.attribute = config.get("attr_name")
def read(self, acq_time=None):
meas = AverageMeasurement()
for reading in meas(acq_time):
reading.value = self.__control.read_attribute(self.attribute).value
return meas.averageNo framework burden: the only requirement is to have 'name' (string) and 'config' (dict) as constructor arguments
Some helper base classes are provided
from khoros.core import Actuator
class detector_cover(Actuator):
def __init__(self, name, config):
Actuator.__init__(self)
self.wago = config["controller"]
self.key_in = config['cover_state_in']
self.key_out = config['cover_state_out']
self.key_cmd = config['cover_cmd']
def _set_in(self):
self.wago.set(self.key_cmd, 0)
def _set_out(self):
self.wago.set(self.key_cmd, 1)
def _is_in(self):
return self.wago.get(self.key_in)
def _is_out(self):
return self.wago.get(self.key_out)Khoros Sequences
from khoros import *
from khoros.setup_globals import *
import logging
import sys
import numpy as np
def quick_realign(slits={s1v:0.2}, cnt=i0, mot=thgt, npts=40, start=-0.2, stop=0.2):
def restore_slits(motor_pos = [(m, m.position()) for m in slits.iterkeys()):
for m, pos in motor_pos:
logging.info("Restoring '%s` to %f", m.name, pos)
m.move(pos)
def quick_realign_cleanup(transmission = attenuators.get_transmission()):
fast_shutter.close()
safshut.close()
attenuators.set_transmission(transmission)
with cleanup(quick_realign_cleanup):
with cleanup(restore_slits):
for m, pos in slits.iteritems():
m.move(pos, wait=False)
safshut.open()
fast_shutter.open()
attenuators.set_transmission(100)
flux = cnt.read()
logging.info("Flux before quick realign: %f", flux)
dscan(mot, start, stop, npts, 0.1, cnt)
data = last_scan_data()
max_pos = data[np.argmax(data[:,1]),0]
mot.move(max_pos)
centrebeam()
flux = cnt.read()
logging.info("Flux after quick realign: %f", flux)
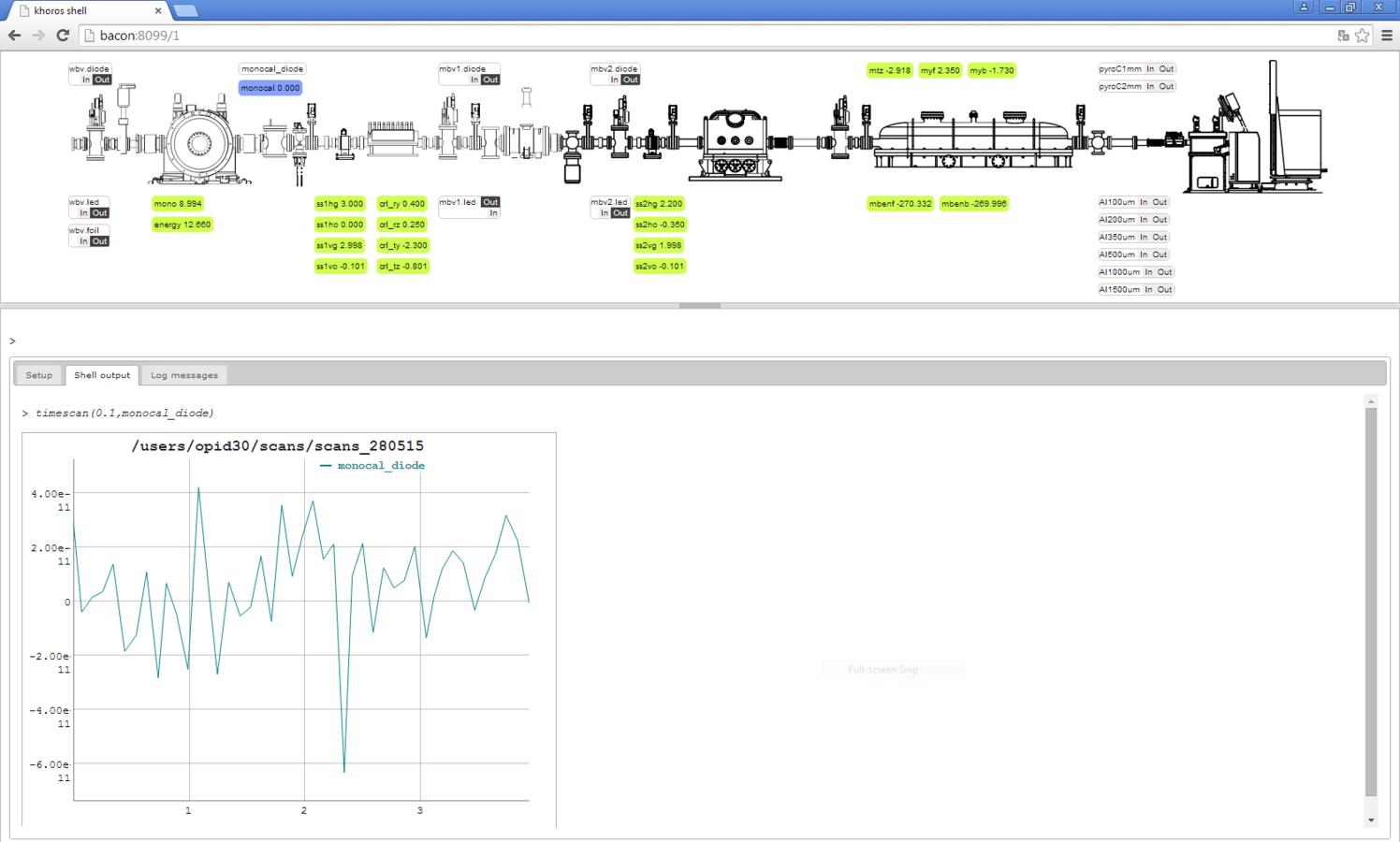
Khoros Shell
Web application, a la IPython Notebook (Jupyter)
Khoros Shell architecture


bottle + gevent
gipc: gevent-cooperative child processes and inter-process communication
Khoros Shell architecture
Shell is part of the package, but it is an optional component
Nice proof-of-concept, with only 800 Javascript LOC (shell.js + synoptic.js), 700 Python LOC (shell.py + interpreter.py)
Currently in use in production on ID30B
Dependencies list
JavaScript: jQuery 2.1, jQueryUI, jQuery Layout, MouseTrap, Dygraph, CodeMirror
Python: bottle, gevent, gipc
Khoros integration within MXCuBE 2
Straightforward with dedicated Hardware Objects
One "Khoros" Hardware Object is used as a "footbridge" for others to get access to Khoros exported objects
from HardwareRepository.BaseHardwareObjects import HardwareObject
import os
import sys
import khoros
class Khoros(HardwareObject):
def __init__(self, *args):
HardwareObject.__init__(self, *args)
def init(self, *args):
setup_file = self.getProperty("setup_file")
khoros.setup(setup_file, self.__dict__)
Future perspectives for MXCuBE
Replace Hardware Repository with Beacon ?
Replace MXCuBE Motor object (which doesn't really exist ?) to an Emotion object -at least with the same API-
MXCuBE 3 Web Edition could integrate a CLI
Questions ?
MASSIF control software stack
By Matias Guijarro
MASSIF control software stack
Leveraging latest ESRF developments and new insights



