Autonomous Traffic simulation in unity
Using Reactive Agents to Learn About Bad Driving
A Senior Thesis Presentation
By Matthew Getch (Oddline best Line)
Reactive versus Deliberative


Some agents think, some merely act.
Self-driving, thinking, safe
Uses Sonar to React.
Uses GPS to Deliberate.
25 mph top speed.
Non-networked.
700,000 consecutive miles.1
Unable to discuss the merits of art.

1. As of April 29th 2014
My car!
Totally Reactive
Of Varying Speeds
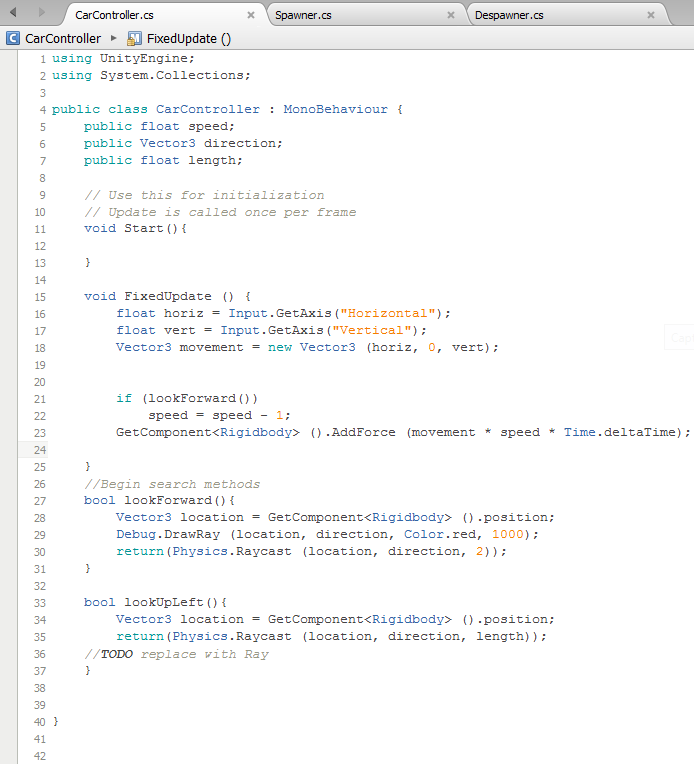
Perfect Vision
Raycasting
No turning
All of similar Size
Varying Degrees of Agression
Materials and Methods
Unity Development suite
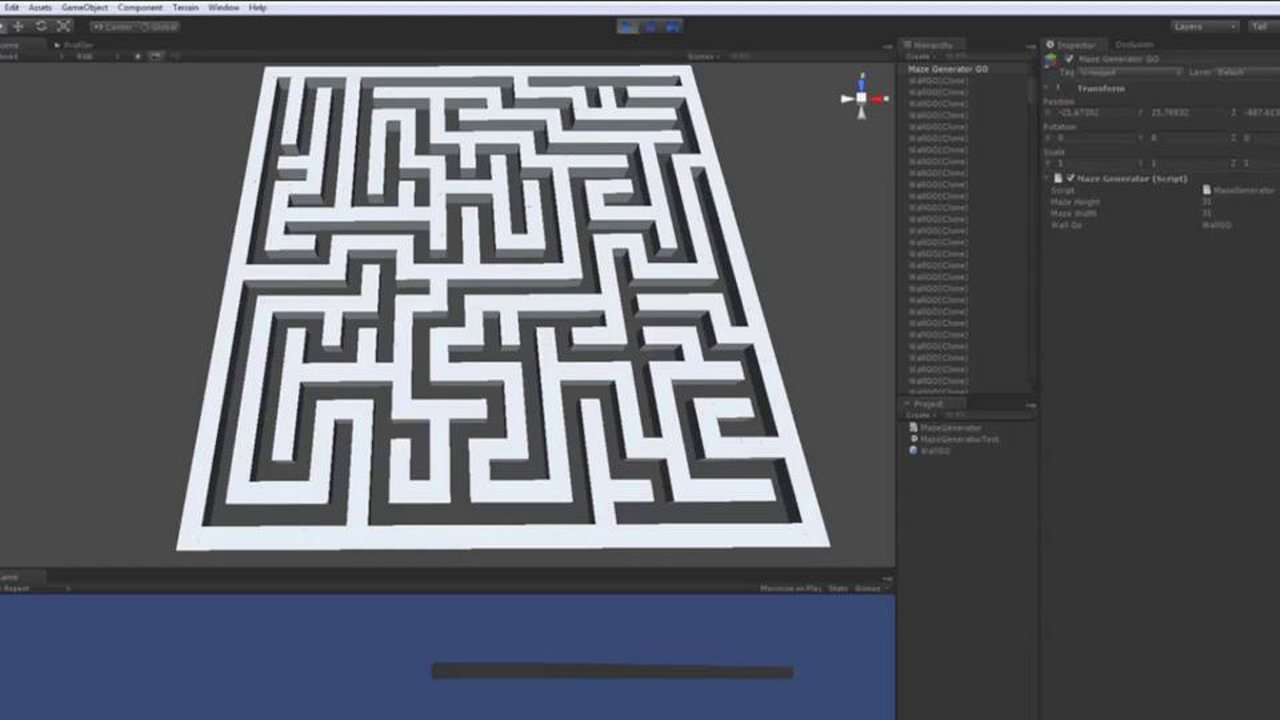
Drag and Drop Object Creation
Built in Physics Operations
Manages OpenGL graphics
Inherent Scripting interface
Free for Students
C#
Similar to Java enough to matter
Statically Typed
Object Oriented
Integrated Library for Unity
Fast Enough
How to Measure traffic flow
Idea:
Use Checkpoints
Average distance/speed per car

Advantages:
Easy
Fast
Accomplishes Goal
Goal
What behavior is the most problematic
Test?
Create Bad Drivers
Let them be bad
Measure congestion
Greed
Traditional Definition
Locally optimal decisions
Independent of other agents
Operational Definition
Endangering other cars
Decisions based solely on time to destination
Code
Higher Speeds/Lower Speeds
Less Vision
What you didn't see
- Multiple Lanes
- The Reactive Component
- Despawning
- Multiple Lines of Sight
TOdo
- Greedy Car Implementation
- More lanes, More cars
- Speed Gates
Questions?
Autonomous Traffic Simulation in Unity
By Matthew FancyPants Getch