Robot-Assisted Feeding with Tractable Online Learning
Ethan K. Gordon; PI: Siddhartha Srinivasa
Supported by: NSF (IIS 2007011; DMS 1839371; NRI 2132848; CHS 2007011; GRFP DGE-1762114)
ethan@ethankgordon.com
OBJECTIVE
Only tactile data is used to find the pose and geometry of an arbitrary dynamic convex object.
Project Website:
https://robotfeeding.io
MORE INFO


https://ethankgordon.com
ONLINE LEARNING FOR BITE ACQUISITION
COMMUNITY-BASED PARTICIPATORY SYSTEM DESIGN
"If I can have a robot do it... it would be me feeding me, and that would be a huge deal"
-Tyler Schrenk, 1985-2023

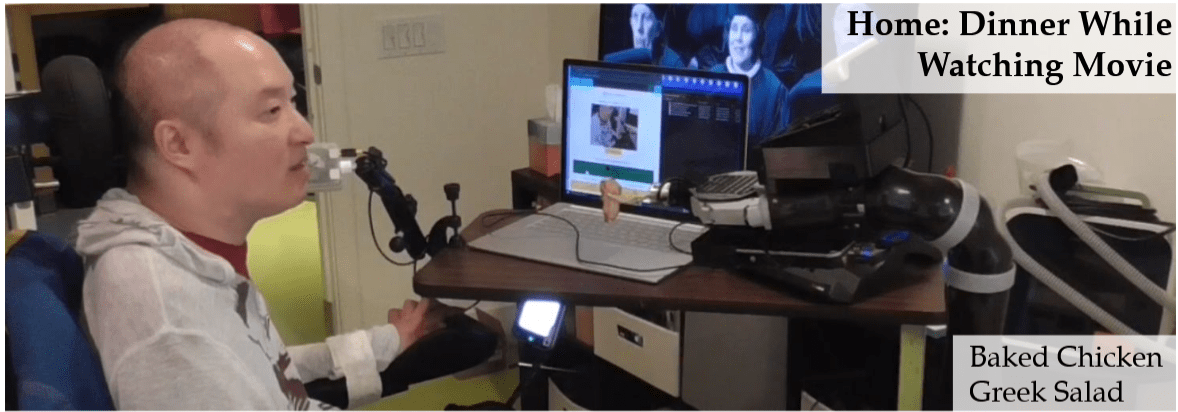
- Goal: develop a robot that can provide long-term feeding assistance to those with mobility limitations.
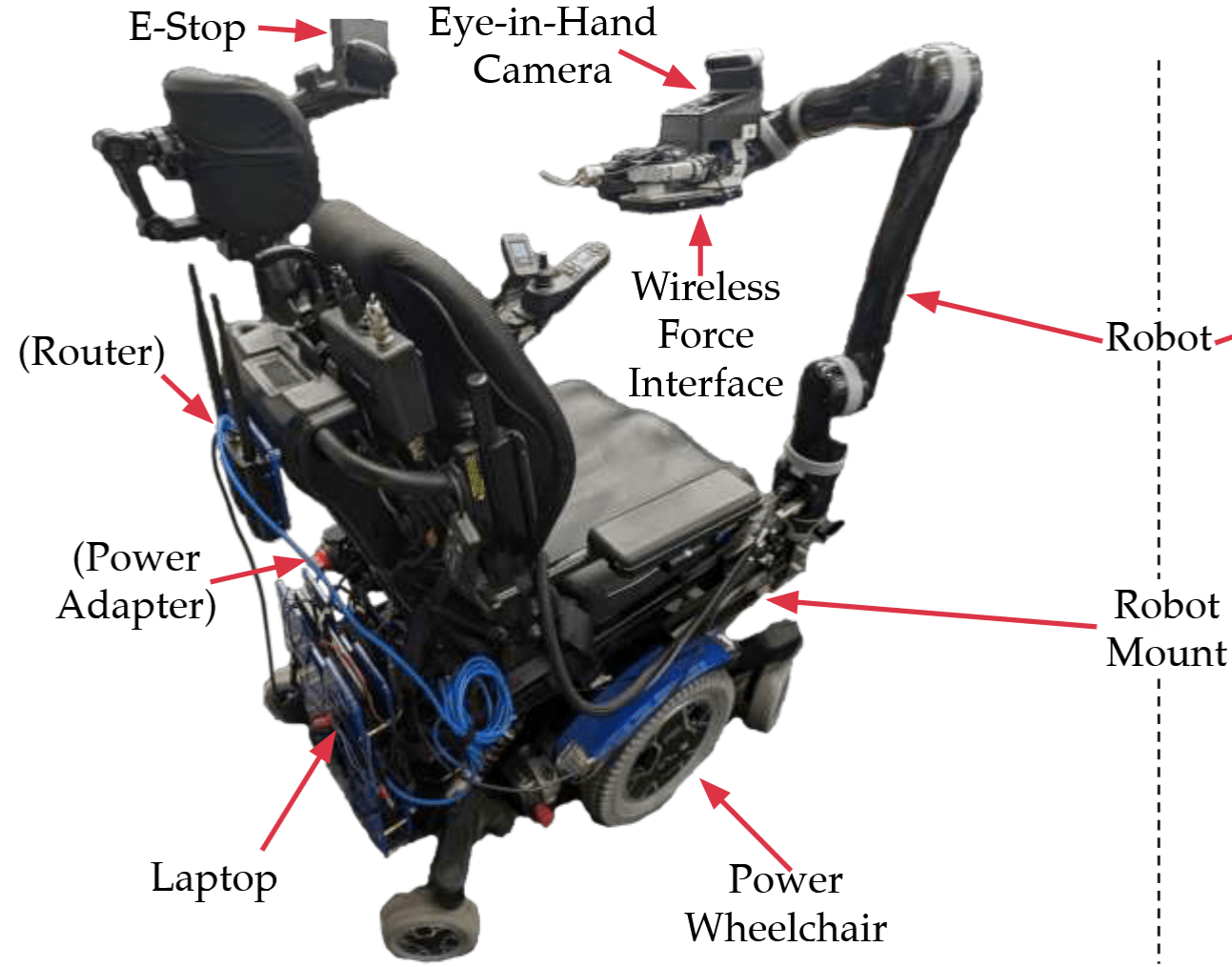
- Platform: modified, wheelchair-mounted Kinova JACO arm
Leverage user studies to define metrics and benchmarks.
- Example: users desired >80% success on food pickup
- Capture diversity: users had C1-C6 spinal cord injuries.
Leverage expert data for policy-space reduction and map onto an augmented contextual bandit setting.
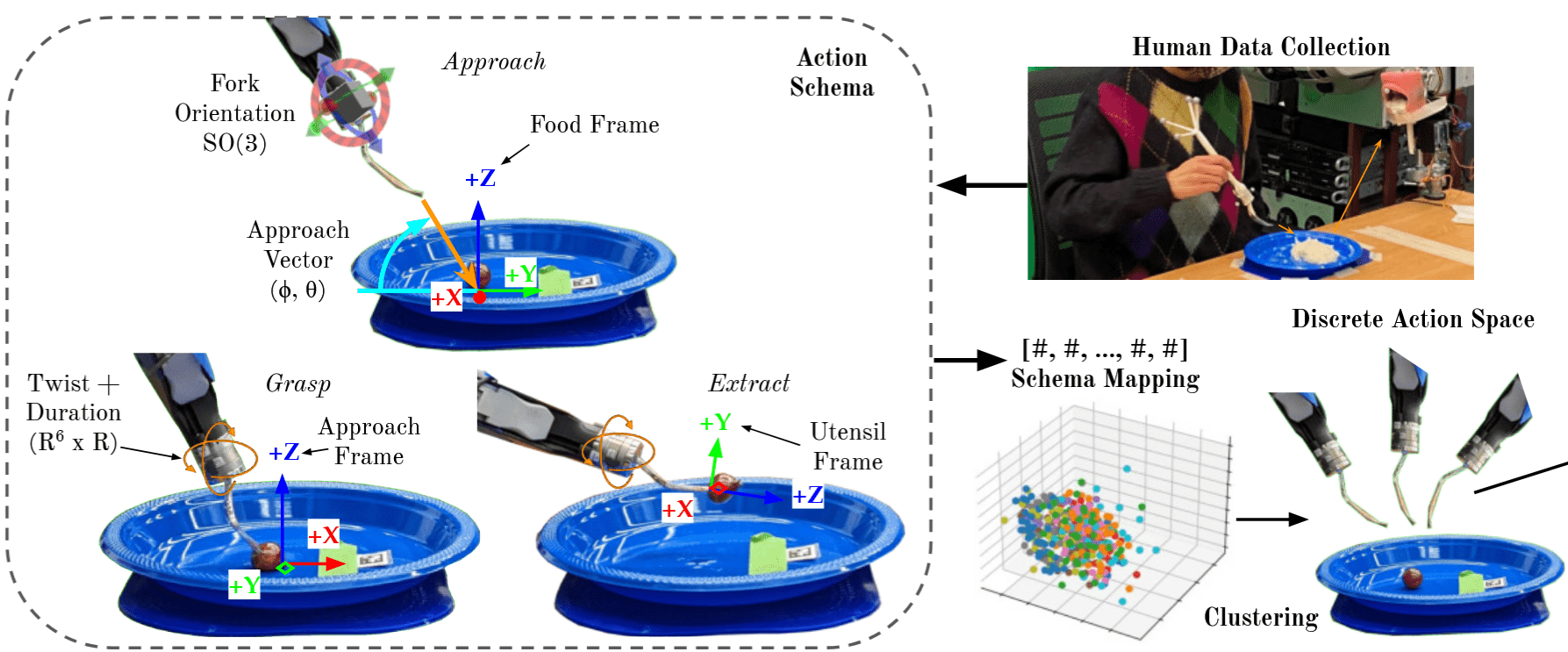
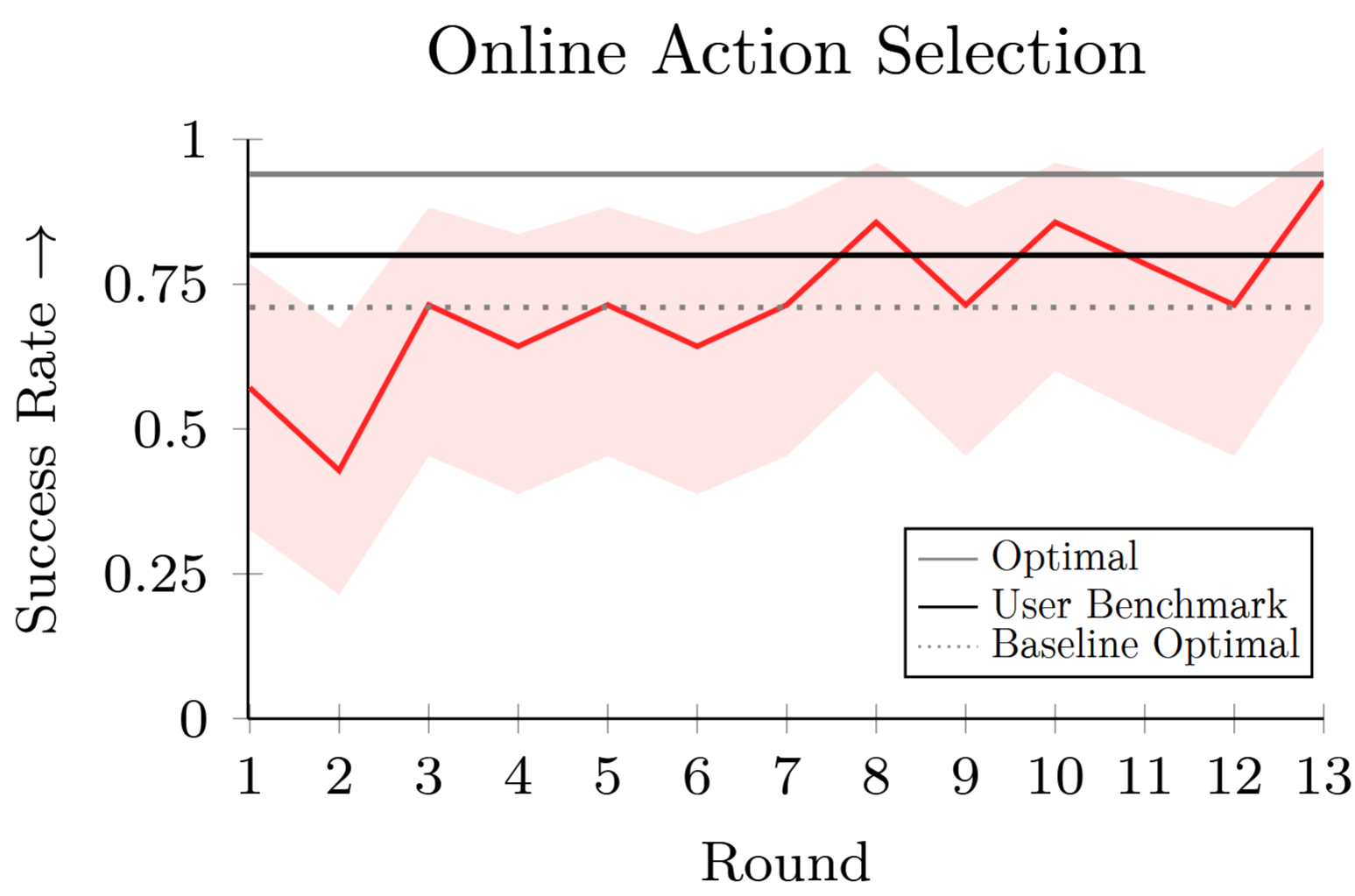
Reach 80% Success In ~8 Tries
- Map human food acquisition data onto a low-dimensional schema and cluster into a discrete set of control policies.
- Emergent policies: wiggling, high-pressure skewering, tilting, and scooping.
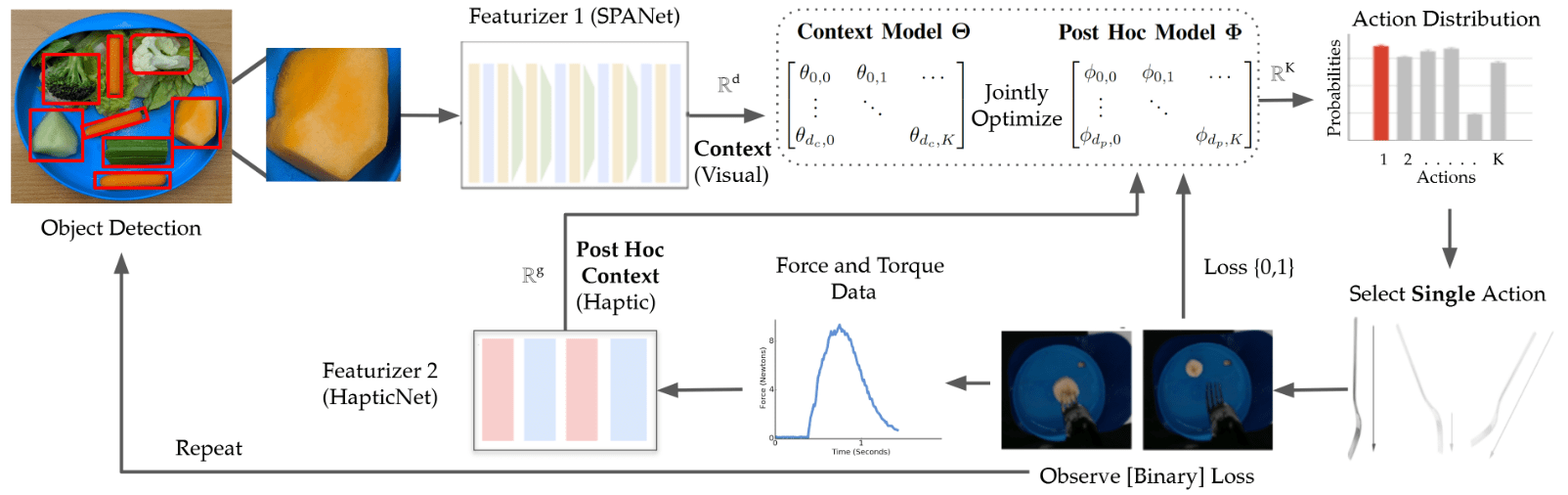
- At deployment time: use visual and post hoc haptic data to learn the best policy for new, never-before-seen food items.
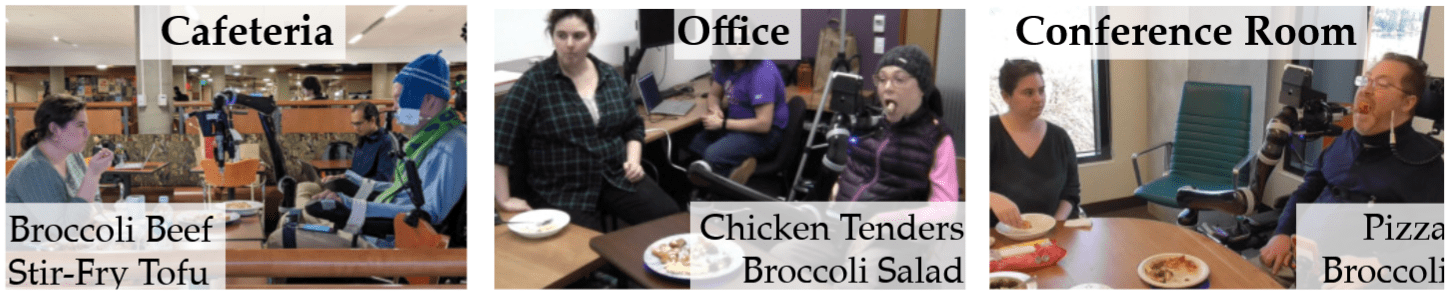
Bring on community researchers (CR) as co-designers to create a system robust enough to be deployed in public and the home.
Tyler Schrenk
Jonathan Ko


Key System Goals:
- Portability: powered from wheelchair battery, no internet
- Safety: Watchdog monitoring force sensor at 120Hz and stopping for any anomaly
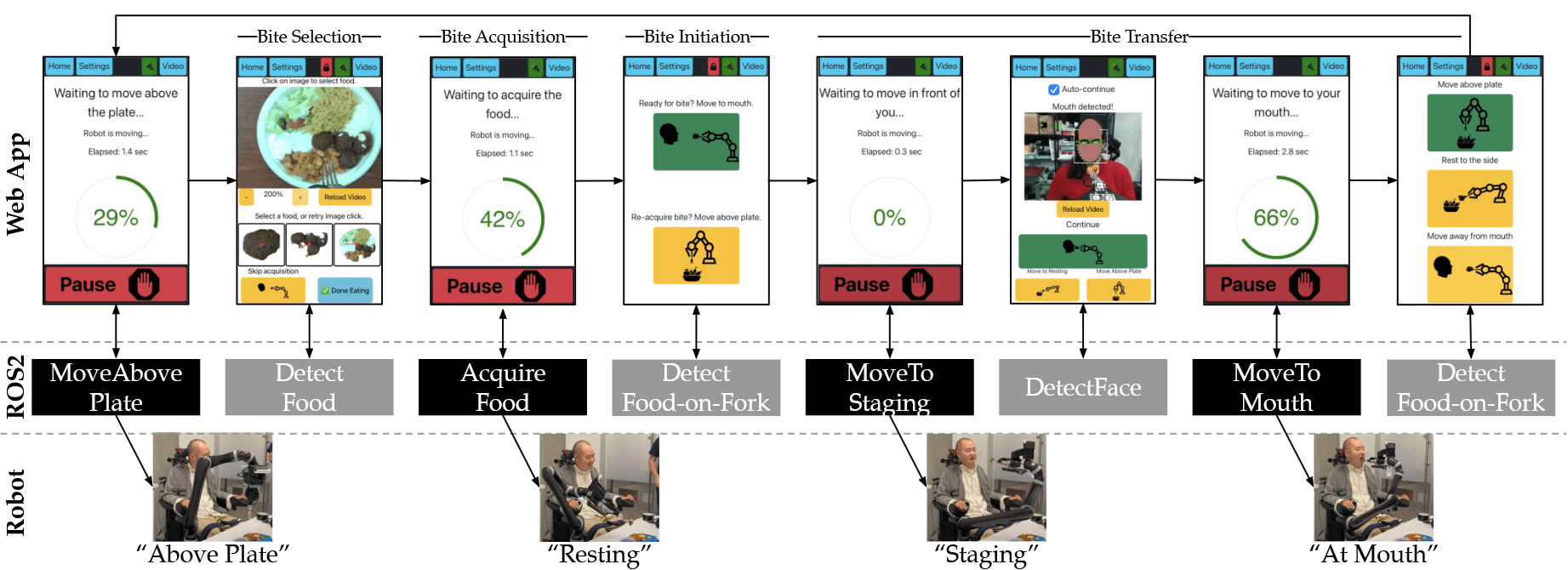
- Customization: Enable full control of the state machine within an accessible app
Weekly meetings with CRs ensured goals were met.
Ethan M3X PI Meeting Poster
By Michael Posa
Ethan M3X PI Meeting Poster
30" H x 40" W poster




