Phase-Type Models in
Life Insurance
Dr Patrick J. Laub
Université Lyon 1




Work
Work
Coffee
Coffee
Lunch
Home
Chat
A typical work day
Work
Work
Coffee
Coffee
Lunch
Home
Bisous
Pause Café
Paperwork
Déjeuner
Il y a un pot
Une petite pinte
Paperwork
Sieste
(Talk)
A typical French work day
Work
Work
Coffee
Coffee
Lunch
Home
Chat
1/3
1/3
1/3
1
1
1
1
1
\boldsymbol{P} = \begin{bmatrix}
0 & 1 & 0 & 0 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 1 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 1 & 0 & 0 \\
0 & 0 & 0 & \frac13 & 0 & \frac13 & \frac13 \\
0 & 0 & 0 & 0 & 0 & 0 & 1 \\
0 & 0 & 0 & 0 & 0 & 0 & 1 \\
\end{bmatrix}
2
5
1
4
3
7
6
1/3
1/3
1/3
1
1
1
1
1
\boldsymbol{\alpha} = \begin{bmatrix}
0.99 \\
0.01 \\
0 \\
0 \\
0 \\
0 \\
0 \\
\end{bmatrix}
\begin{matrix}
1 & 2 & 3 & 4 & 5 & 6 & 7 \\
\end{matrix}
\begin{matrix}
1 \\
2 \\
3 \\
4 \\
5 \\
6 \\
7
\end{matrix}
\begin{matrix}
1 \\
2 \\
3 \\
4 \\
5 \\
6 \\
7
\end{matrix}
From Markov chains to Markov processes
- Coffee
- Work
- Lunch
- Coffee
- Work
- Chat
- Work
- Home
| State | Time in State |
|---|---|
| Coffee | 5 mins |
| Work | 2 hours 3 mins |
| Lunch | 26 mins |
| Coffee | 11 mins |
| Work | 1 hour 37 mins |
| Chat | 45 mins |
| Work | 2 hours 1 mins |
Chain
Discrete Time
Process
Continuous Time




t
X_t
Example Markov process
( X_t )_{t \ge 0}
The Markov property
Markov chain State space
\{ X_n \}_{n \ge 0}
\{1, ..., p \}
\mathbb{P}(X_{n+1} = i \mid X_0 = x_0, \dots, X_n = x_n)
= \mathbb{P}(X_n = i \mid X_n = x_n)
Markov process at times
( X_t )_{t \ge 0}
\mathbb{P}(X_{t_{n+1}} = i \mid X_{t_0} = x_{t_0}, \dots, X_{t_n} = x_{t_n})
= \mathbb{P}(X_{t_{n+1}} = i \mid X_{t_n} = x_{t_n})
0 \le t_1 < \dots < t_n < t_{n+1}
Sojourn times
Sojourn times are the random lengths of time spent in each state

S_1
S_2
S_3
S_5^{(1)}
S_5^{(2)}
S_1 \sim \mathsf{Exp}(1/\mu_1)
S_2 \sim \mathsf{Exp}(1/\mu_2)
S_5^{(1)}, S_5^{(2)} \overset{\mathrm{i.i.d.}}{\sim} \mathsf{Exp}(1/\mu_5)
S_4
\mathbb{P}(E > t+s \mid E > t) = \mathbb{P}(E > s)
Transition rate matrices
\boldsymbol{P} = \begin{bmatrix}
0 & 1 & 0 & 0 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 1 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 1 & 0 & 0 \\
0 & 0 & 0 & \frac13 & 0 & \frac13 & \frac13 \\
0 & 0 & 0 & 0 & 0 & 0 & 1 \\
0 & 0 & 0 & 0 & 0 & 0 & 1 \\
\end{bmatrix}
2
5
1
4
3
7
6
1/3
1/3
1/3
1
1
1
1
1
\boldsymbol{Q} = \begin{bmatrix}
-10 & 10 & 0 & 0 & 0 & 0 & 0 \\
0 & -\frac23 & \frac23 & 0 & 0 & 0 & 0 \\
0 & 0 & -2 & 2 & 0 & 0 & 0 \\
0 & 0 & 0 & -10 & 10 & 0 & 0 \\
0 & 0 & 0 & \frac23 & -2 & \frac23 & \frac23 \\
0 & 0 & 0 & 0 & \frac43 & -\frac43 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 & 0
\end{bmatrix}
S_i \sim \mathsf{Exp}(\lambda_i = 1/\mu_i)
\begin{aligned}
\mu_1 = 0.1 &\Leftrightarrow \lambda_1 = 10 \\
\mu_2 = 1.5 &\Leftrightarrow \lambda_2 = \frac23 \\
\mu_3 = 0.5 &\Leftrightarrow \lambda_3 = 2 \\
\mu_4 = 0.1 &\Leftrightarrow \lambda_3 = 10 \\
\mu_5 = 0.5 &\Leftrightarrow \lambda_5 = 2 \\
\mu_6 = 0.75 &\Leftrightarrow \lambda_6 = \frac43 \\
\mu_6 = \infty &\Leftrightarrow \lambda_6 = 0
\end{aligned}
\boldsymbol{\alpha} = [ 0.99, 0.01, 0, 0, \dots ]^\top
\begin{matrix}
1 & 2 & 3 & 4 & 5 & 6 & 7 \\
\end{matrix}
\begin{matrix}
1 \\
2 \\
3 \\
4 \\
5 \\
6 \\
7
\end{matrix}
\begin{matrix}
1~~ & 2~~ & 3~~ & 4~~ & 5~~ & 6~~ & 7 \\
\end{matrix}
\begin{matrix}
1 \\
2 \\
3 \\
4 \\
5 \\
6 \\
7
\end{matrix}
Phase-type definition
Markov process State space
- Initial distribution
- Sub-transition matrix
- Exit rates
\boldsymbol{\alpha}
\boldsymbol{T}
\boldsymbol{t} = -\boldsymbol{T} 1
\boldsymbol{t}
\tau = \inf_t \{ X_t = \dagger \}
( X_t )_{t \ge 0}
\{1, ..., p, \dagger \}
\Leftrightarrow \tau \sim \mathrm{PhaseType}(\boldsymbol{\alpha}, \boldsymbol{T})
\boldsymbol{Q} = \begin{bmatrix}
\boldsymbol{T} & \boldsymbol{t} \\
0 & 0
\end{bmatrix}
\dagger
1
3
2
\boldsymbol{Q} = \begin{bmatrix}
-6 & 4 & 2 & 0 \\
1 & -1 & 0 & 0 \\
0 & 5 & -5.5 & 0.5 \\
0 & 0 & 0 & 0
\end{bmatrix}
\boldsymbol{\alpha} = [ \frac13, \frac13, \frac13, 0 ]^\top
2
4
1
0.5
5
Example
Markov process State space
( X_t )_{t \ge 0}
\{1, 2, 3, \dagger \}
\boldsymbol{T} = \begin{bmatrix}
-6 & 4 & 2 \\
1 & -1 & 0 \\
0 & 5 & -5.5
\end{bmatrix}
\boldsymbol{t} = \begin{bmatrix}
0 \\
0 \\
0.5
\end{bmatrix}
Phase-type distributions
Markov chain State space
( X_t )_{t \ge 0}
\{1, ..., p, \dagger = 0\}
Phase-type quiz...
\boldsymbol{\alpha} = [ 1 ], \boldsymbol{T} = [ -2 ], \boldsymbol{t} = [ 2 ]
\boldsymbol{\alpha} = \begin{bmatrix}
1 \\
0
\end{bmatrix} ,
\boldsymbol{T} = \begin{bmatrix}
-1 & 1 \\
0 & -2 \\
\end{bmatrix}
, \boldsymbol{t} = \begin{bmatrix}
0 \\
2
\end{bmatrix}
\boldsymbol{\alpha} = \begin{bmatrix}
0.5 \\
0.5
\end{bmatrix} ,
\boldsymbol{T} = \begin{bmatrix}
-1 & 0 \\
0 & -2
\end{bmatrix}
, \boldsymbol{t} = \begin{bmatrix}
1 \\
2
\end{bmatrix}
Phase-type generalises...
- Exponential distribution
- Sums of exponentials (Erlang distribution)
- Mixtures of exponentials (hyperexponential distribution)
\boldsymbol{\alpha} = [ 1 ], \boldsymbol{T} = [ -\lambda ], \boldsymbol{t} = [ \lambda ]
\boldsymbol{\alpha} = \begin{bmatrix}
1 \\
0 \\
0
\end{bmatrix} ,
\boldsymbol{T} = \begin{bmatrix}
-\lambda_1 & \lambda_1 & 0 \\
0 & -\lambda_2 & \lambda_2 \\
0 & 0 & -\lambda_3
\end{bmatrix}
, \boldsymbol{t} = \begin{bmatrix}
0 \\
0 \\
\lambda_3
\end{bmatrix}
\boldsymbol{\alpha} = \begin{bmatrix}
\alpha_1 \\
\alpha_2 \\
\alpha_3
\end{bmatrix} ,
\boldsymbol{T} = \begin{bmatrix}
-\lambda_1 & 0 & 0 \\
0 & -\lambda_2 & 0 \\
0 & 0 & -\lambda_3
\end{bmatrix}
, \boldsymbol{t} = \begin{bmatrix}
\lambda_1 \\
\lambda_2 \\
\lambda_3
\end{bmatrix}
When to use phase-type?
When your problem has "flow chart" Markov structure.
\boldsymbol{\alpha} = \begin{bmatrix}
1 \\
0 \\
0 \\
\vdots
\end{bmatrix} , \quad
\boldsymbol{T} = \begin{bmatrix}
-t_{11} & t_{12} & 0 & \\
0 & -t_{22} & t_{23} & \dots\\
0 & 0 & -t_{33} & \\
& \vdots & & \ddots
\end{bmatrix} , \quad
\boldsymbol{t} = \begin{bmatrix}
t_1 \\
t_2 \\
t_3 \\
\vdots
\end{bmatrix}
E.g. mortality. Age is a deterministic process, but imagine that the human body goes from physical age \(0, 1, 2, \dots\) at random speed.
("Coxian distribution")
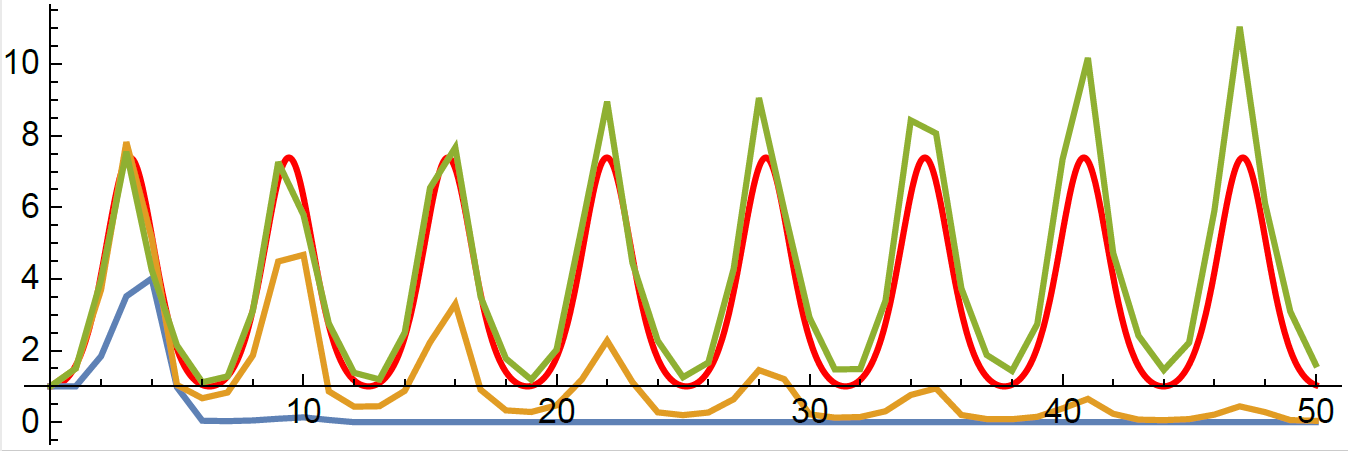
Class of phase-types is dense
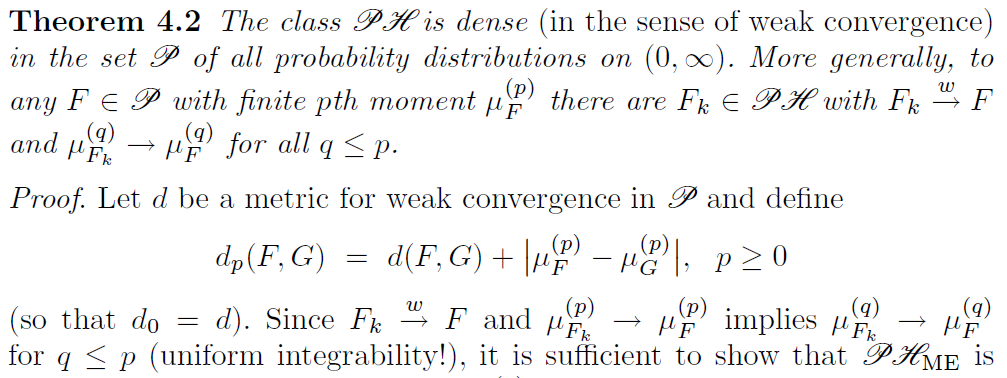
S. Asmussen (2003), Applied Probability and Queues, 2nd Edition, Springer
Class of phase-types is dense










p = 1
\text{Target}
p = 10
p = 25
p = 50
p = 100
p = 150
p = 200
p = 250
p = 300
Why does that work?
\tau_n \sim \mathrm{Erlang}(n, n/T) \,, \quad \tau_n \approx T
Can make a phase-type look like a constant value


More cool properties
Closure under addition, minimum, maximum
(\tau \mid \tau > s) \sim \mathrm{PhaseType}(\boldsymbol{\alpha}_s, \boldsymbol{T})
\tau_i \overset{\mathrm{ind.}}{\sim} \mathrm{PhaseType}(\boldsymbol{\alpha}_i, \boldsymbol{T}_i)
\Rightarrow \tau_1 + \tau_2 \sim \mathrm{PhaseType}(\dots, \dots)
\Rightarrow \min\{ \tau_1 , \tau_2 \} \sim \mathrm{PhaseType}(\dots, \dots)
... and under conditioning
\Rightarrow \max\{ \tau_1 , \tau_2 \} \sim \mathrm{PhaseType}(\dots, \dots)
Phase-type properties
Matrix exponential
Density and tail
Moments
Laplace transform
f_\tau(s) = \boldsymbol{\alpha}^\top \mathrm{e}^{\boldsymbol{T} s} \boldsymbol{t}
\mathrm{e}^{\boldsymbol{T} s} = \sum_{i=0}^\infty \frac{(\boldsymbol{T} s)^i}{i!}
\tau \sim \mathrm{PhaseType}(\boldsymbol{\alpha}, \boldsymbol{T})
\overline{F}_\tau(s) = \boldsymbol{\alpha}^\top \mathrm{e}^{\boldsymbol{T} s} 1
\mathbb{E}[\tau] = {-}\boldsymbol{\alpha}^\top \boldsymbol{T}^{-1} \boldsymbol{1}
\mathbb{E}[\tau^n] = (-1)^n n! \,\, \boldsymbol{\alpha}^\top \boldsymbol{T}^{-n} \boldsymbol{1}
\mathbb{E}[\mathrm{e}^{-s\tau}] = \boldsymbol{\alpha}^\top (s \boldsymbol{I} - \boldsymbol{T})^{-1} \boldsymbol{t}
\tau
S_t
t
Guaranteed Minimum Death Benefit
S_\tau
\text{Payoff} = \max( S_{\tau}, K )
Application
Equity-linked life insurance
\tau \sim \text{PhaseType}(\boldsymbol{\alpha}, \boldsymbol{T})
\tau
t
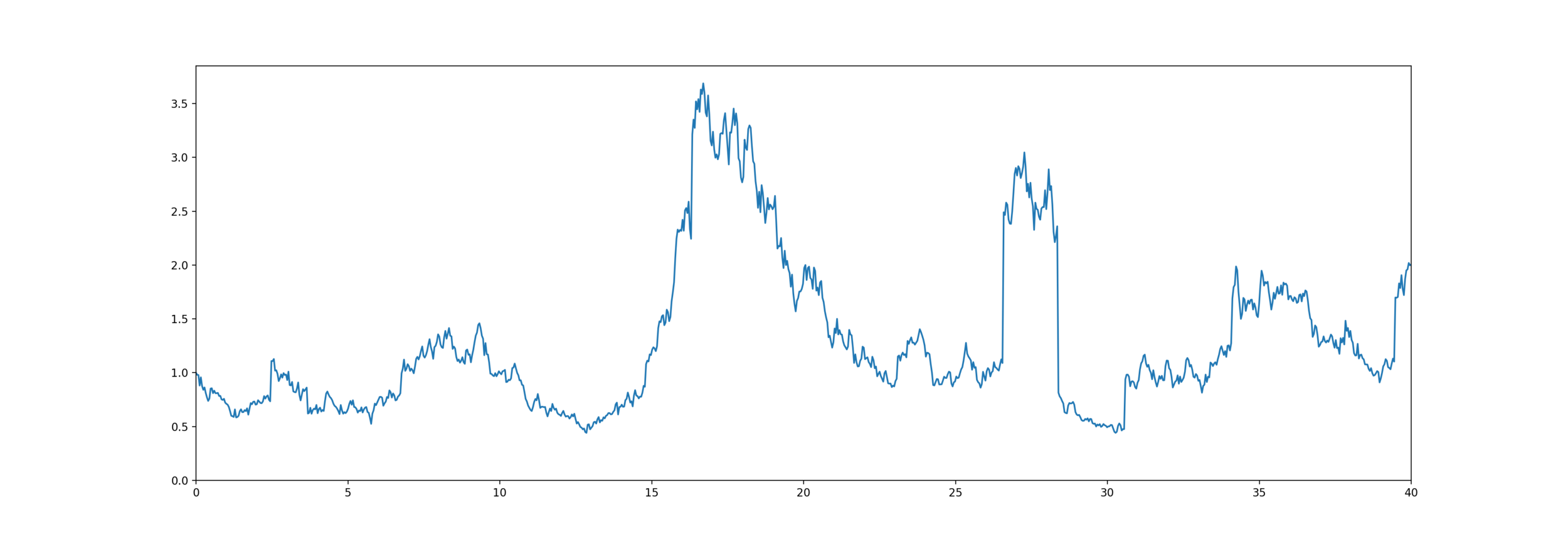
High Water Death Benefit
\text{Payoff} = \overline{S}_{\tau}
Equity-linked life insurance
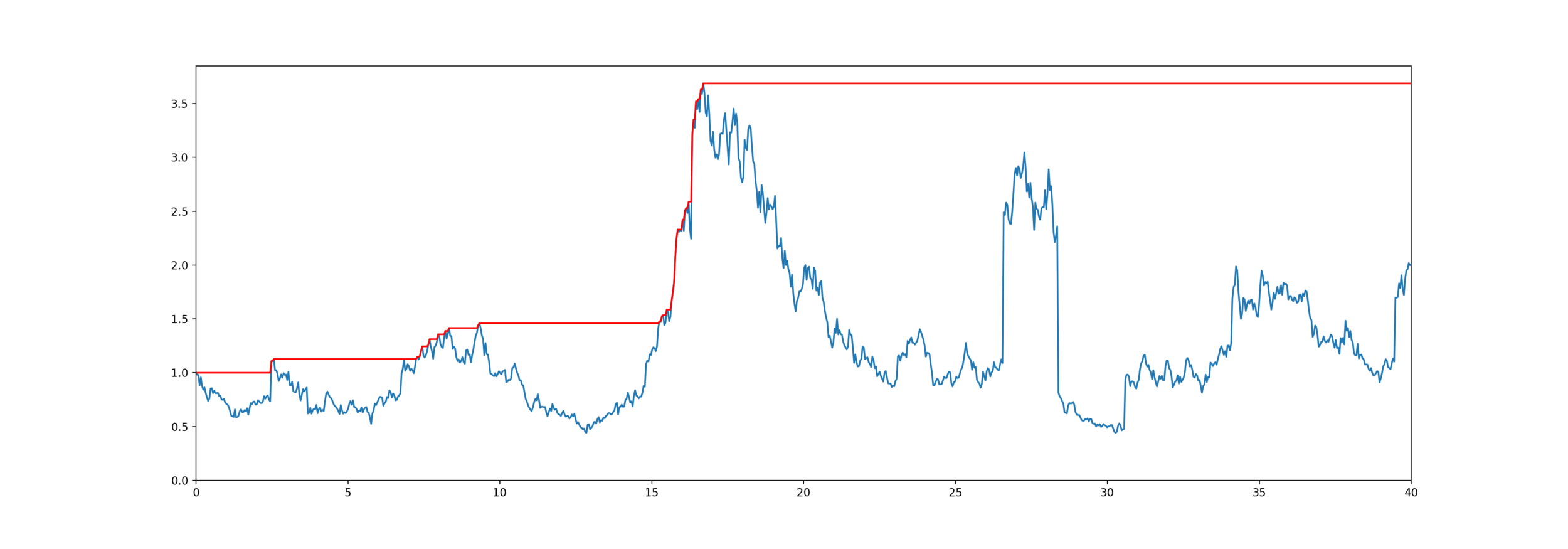
\overline{S}_\tau
\overline{S}_t = \max_{s \le t} S_s
\tau \sim \text{PhaseType}(\boldsymbol{\alpha}, \boldsymbol{T})
Model for mortality and equity
The customer lives for years,
\tau
\tau \sim \text{PhaseType}(\boldsymbol{\alpha}, \boldsymbol{T})
X_t \sim \text{Jump Diffusion}
S_t = S_0 \mathrm{e}^{X_t}
Equity is an exponential jump diffusion,
\text{Brownian Motion}(\mu, \sigma^2) + \text{Compound Poisson}(\lambda_1) + \text{Compound Poisson}(\lambda_2)
\text{Price} = \mathbb{E}[ \mathrm{e}^{-\delta \tau} \text{Payoff}( S_\tau, \overline{S}_\tau ) ]
S_t
t
Exponential PH-Jump Diffusion
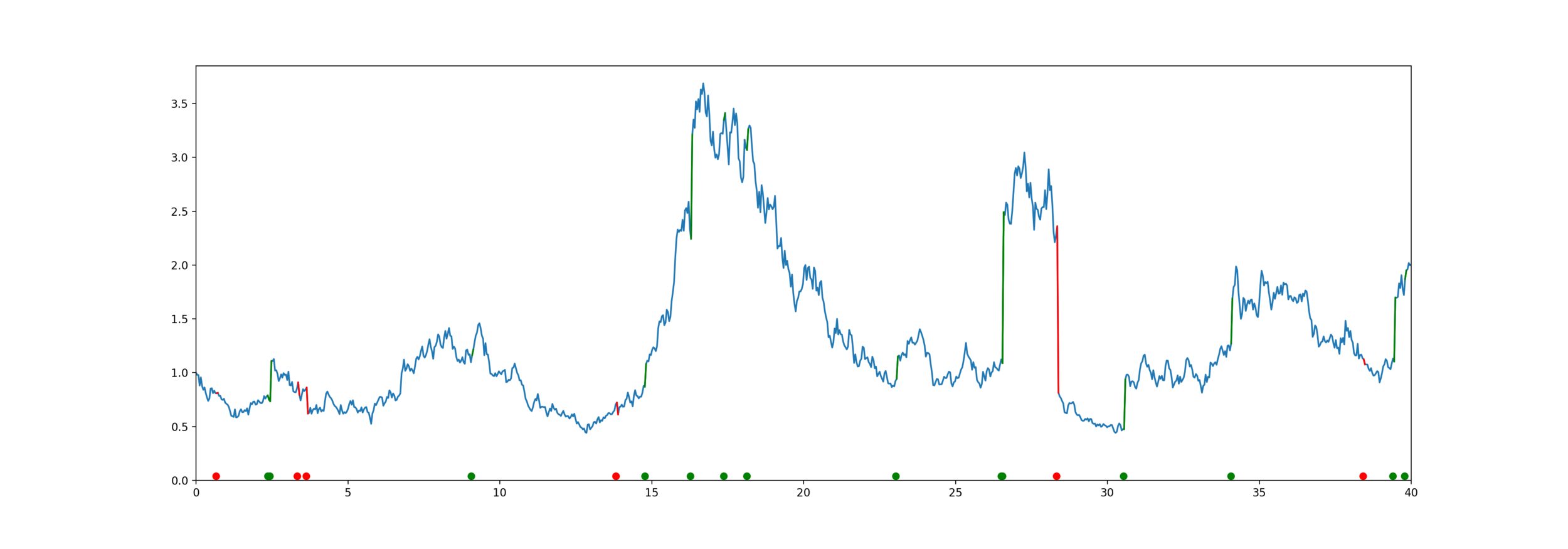
\text{UpJumpSize}_i \overset{\mathrm{i.i.d.}}{\sim} \text{PhaseType}(\boldsymbol{\alpha}_1, \boldsymbol{T}_1)
\text{DownJumpSize}_i \overset{\mathrm{i.i.d.}}{\sim} \text{PhaseType}(\boldsymbol{\alpha}_2, \boldsymbol{T}_2)
\# \text{UpJumps}(0, t) \sim \mathrm{Poisson}(\lambda_1 t)
\# \text{DownJumps}(0, t) \sim \mathrm{Poisson}(\lambda_2 t)
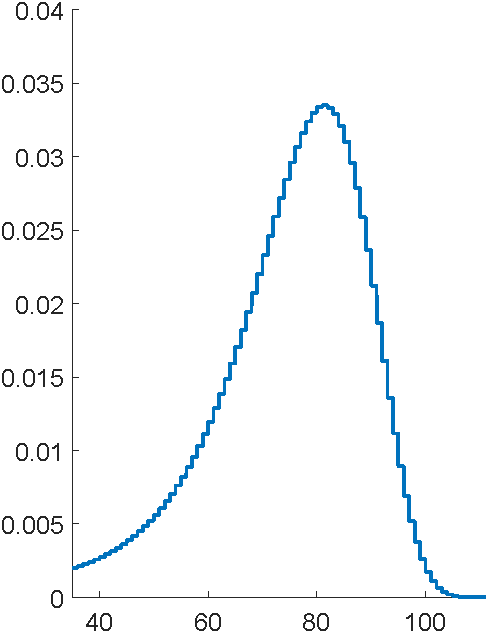
Problem: to model mortality via phase-type
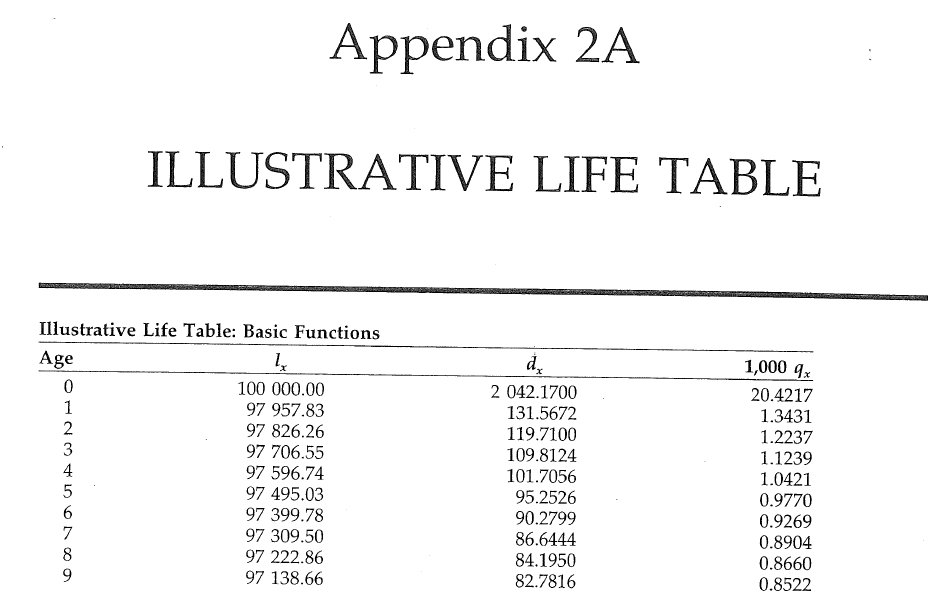
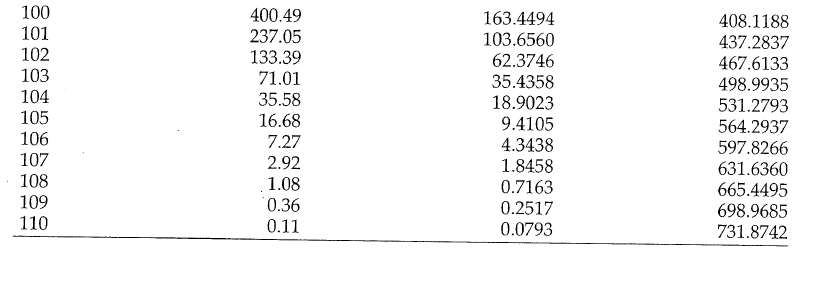
Bowers et al (1997), Actuarial Mathematics, 2nd Edition
Fit General Phase-type

p = 5
p = 10
p = 20
\text{Life Table}
Representation is not unique
\boldsymbol{\alpha} = [ 1, 0, 0 ]^\top
\boldsymbol{T}_1 = \begin{bmatrix}
-1 & 1 & 0 \\
0 & -2 & 2 \\
0 & 0 & -3
\end{bmatrix}
\boldsymbol{T}_2 = \begin{bmatrix}
-3 & 3 & 0 \\
0 & -2 & 2 \\
0 & 0 & -1
\end{bmatrix}
\tau_1 \sim \mathrm{PhaseType}(\boldsymbol{\alpha}, \boldsymbol{T}_1)
\tau_2 \sim \mathrm{PhaseType}(\boldsymbol{\alpha}, \boldsymbol{T}_2)
\tau_1 \overset{\mathscr{D}}{=} \tau_2
Also, not easy to tell if any parameters produce a valid distribution
Lots of parameters to fit
- General
- Coxian distribution
\boldsymbol{\alpha} = \begin{bmatrix}
1 \\
0 \\
0
\end{bmatrix} , \quad
\boldsymbol{T} = \begin{bmatrix}
-t_{11} & t_{12} & 0 \\
0 & -t_{22} & t_{23} \\
0 & 0 & -t_{33}
\end{bmatrix} , \quad
\boldsymbol{t} = \begin{bmatrix}
t_1 \\
t_2 \\
t_{33}
\end{bmatrix}
\boldsymbol{\alpha} = \begin{bmatrix}
\alpha_1 \\
\alpha_2 \\
\alpha_3
\end{bmatrix} , \quad
\boldsymbol{T} = \begin{bmatrix}
-t_{11} & t_{12} & t_{13} \\
t_{21} & -t_{22} & t_{23} \\
t_{31} & t_{32} & -t_{33}
\end{bmatrix} , \quad
\boldsymbol{t} = \begin{bmatrix}
t_1 \\
t_2 \\
t_3
\end{bmatrix}
p^2 + (p-1)
p + (p-1)
Fit Coxian distributions
p = 5
p = 10
p = 20
\text{Life Table}
General vs Coxian
Rewrite in Julia
void rungekutta(int p, double *avector, double *gvector, double *bvector,
double **cmatrix, double dt, double h, double **T, double *t,
double **ka, double **kg, double **kb, double ***kc)
{
int i, j, k, m;
double eps, h2, sum;
i = dt/h;
h2 = dt/(i+1);
init_matrix(ka, 4, p);
init_matrix(kb, 4, p);
init_3dimmatrix(kc, 4, p, p);
if (kg != NULL)
init_matrix(kg, 4, p);
...
for (i=0; i < p; i++) {
avector[i] += (ka[0][i]+2*ka[1][i]+2*ka[2][i]+ka[3][i])/6;
bvector[i] += (kb[0][i]+2*kb[1][i]+2*kb[2][i]+kb[3][i])/6;
for (j=0; j < p; j++)
cmatrix[i][j] +=(kc[0][i][j]+2*kc[1][i][j]+2*kc[2][i][j]+kc[3][i][j])/6;
}
}
}
This function: 116 lines of C, built-in to Julia
Whole program: 1700 lines of C, 300 lines of Julia
# Run the ODE solver.
u0 = zeros(p*p)
pf = ParameterizedFunction(ode_observations!, fit)
prob = ODEProblem(pf, u0, (0.0, maximum(s.obs)))
sol = solve(prob, OwrenZen5())https://github.com/Pat-Laub/EMpht.jl
DE solver going negative
Coxian with uniformization

p = 50
p = 75
p = 100
\text{Life Table}
A twist on the Coxian form
Canonical form 1
t_{11} < t_{22} < \dots < t_{pp}
\boldsymbol{\alpha} = \begin{bmatrix}
\alpha_1 \\
\alpha_2 \\
\alpha_3
\end{bmatrix} , \quad
\boldsymbol{T} = \begin{bmatrix}
-t_{11} & t_{11} & 0 \\
0 & -t_{22} & t_{22} \\
0 & 0 & -t_{33}
\end{bmatrix} , \quad
\boldsymbol{t} = \begin{bmatrix}
0 \\
0 \\
t_{33}
\end{bmatrix}
Et voilà

p = 200
\text{Life Table}
using Pkg; Pkg.add("EMpht")
using EMpht
lt = EMpht.parse_settings("life_table.json")[1]
phCF200 = empht(lt, p=200, ph_structure="CanonicalForm1")f(s) = \boldsymbol{\alpha}^\top \mathrm{e}^{\boldsymbol{T} s} \boldsymbol{t}
How to fit them?
\mathrm{e}^{\boldsymbol{T} s} = \sum_{i=0}^\infty \frac{(\boldsymbol{T} s)^i}{i!}
\boldsymbol{\tau} = [\tau_1, \tau_2, \dots, \tau_n]
Observations:
L( \boldsymbol{\alpha} , \boldsymbol{T} \mid \boldsymbol{\tau} )
= \prod_{i=1}^n \boldsymbol{\alpha}^\top \mathrm{e}^{\boldsymbol{T} \tau_i} \boldsymbol{t}
\boldsymbol{t} = -\boldsymbol{T} 1
Derivatives??
\ell( \boldsymbol{\alpha} , \boldsymbol{T} \mid \boldsymbol{\tau} ) = \sum_{i=1}^n \log\Bigl\{ \boldsymbol{\alpha}^\top \left[ \sum_{j=0}^\infty \frac{(\boldsymbol{T} \tau_i)^j}{j!} \right] \boldsymbol{t} \Bigr\}
How to fit them?
\begin{aligned}
L( \boldsymbol{\alpha} , \boldsymbol{T} \mid \boldsymbol{B}, \boldsymbol{Z}, \boldsymbol{N} )
&= \prod_{i=1}^p \alpha_i^{B_i} \prod_{i=1}^p \mathrm{e}^{-t_{ii} Z_i } \prod_{i,j \text{ combs}} t_{ij}^{N_{ij}} \\
\end{aligned}
Hidden values:
\(B_i\) number of MC's starting in state \(i\)
\(Z_i\) total time spend in state \(i\)
\(N_{ij}\) number of transitions from state \(i\) to \(j\)
\boldsymbol{T} = \begin{bmatrix}
-t_{11} & t_{12} & t_{13} \\
t_{21} & -t_{22} & t_{23} \\
t_{31} & t_{32} & -t_{33}
\end{bmatrix}
\widehat{\alpha}_i = \frac{B_i}{n}
\widehat{t}_{i} = \frac{N_{i\dagger}}{Z_i}
\boldsymbol{t} = \begin{bmatrix}
t_1 \\
t_2 \\
t_3
\end{bmatrix}
\boldsymbol{\alpha} = \begin{bmatrix}
\alpha_1 \\
\alpha_2 \\
\alpha_3
\end{bmatrix}
\widehat{t}_{ij} = \frac{N_{ij}}{Z_i}
\widehat{t}_{ii} = -\sum_{j\not=i} \widehat{t}_{ij}
Fitting with hidden data
EM algorithm
\boldsymbol{\tau} = [\tau_1, \tau_2, \dots, \tau_n]
Latent values:
\(B_i\) number of MC's starting in state \(i\)
\(Z_i\) total time spend in state \(i\)
\(N_{ij}\) number of transitions from state \(i\) to \(j\)
- Guess \( (\boldsymbol{\alpha}^{(0)}, \boldsymbol{T}^{(0)} )\)
- Iterate \(t = 0,\dots\)
- E-step
- M-step
\widehat{\alpha}_i^{(t+1)} = \frac{\mathbb{E}[B_i]}{n}
\widehat{t}_{ij}^{{t+1}} = \frac{\mathbb{E}[N_{ij}]}{\mathbb{E}[Z_i]}
EM algorithm:
\mathbb{E}_{(\boldsymbol{\alpha}^{(t)}, \boldsymbol{T}^{(t)})}[B_i \mid \boldsymbol{\tau}]
\mathbb{E}_{(\boldsymbol{\alpha}^{(t)}, \boldsymbol{T}^{(t)})}[Z_i \mid \boldsymbol{\tau}]
\mathbb{E}_{(\boldsymbol{\alpha}^{(t)}, \boldsymbol{T}^{(t)})}[N_{ij} \mid \boldsymbol{\tau}]
Questions?
https://slides.com/plaub/phase-type-lecture

Phase-type lecture
By plaub




