

































































































Roberto Calandra PRO
Full Professor at TU Dresden. Head of the LASR Lab. Working in AI, Robotics and Touch Sensing.
Roberto Calandra
Oxford University - 26 August 2024
Learning, Adaptive Systems, and Robotics (LASR) Lab
How to scale to more complex, unstructured domains?
Robotics
Finance
Biological Sciences
Logistics /
Decision Making
Disaster Relief
Industrial Automation
Exploration
Medicine & Eldercare
From YouTube: https://www.youtube.com/watch?v=g0TaYhjpOfo
Multi-modal Sensing
Adaptive Hardware configuration
Quick adaptation to new tasks
Touch Sensing
Morphological adaptation
In this talk
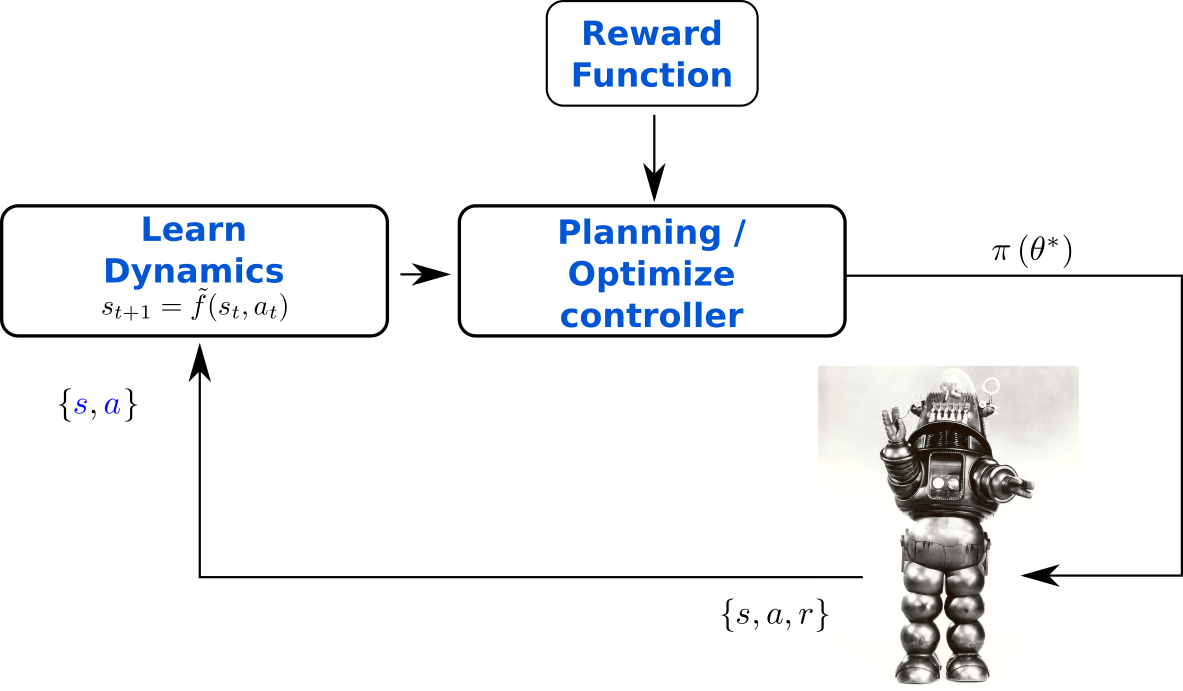
Model-based
Reinforcement Learning
Hardware
Software
Multi-modal Sensing
Adaptive Hardware configuration
Quick adaptation to new tasks
Touch Sensing
Morphological adaptation
Model-based
Reinforcement Learning
Hardware
Software
From the lab of Dr. Ronald Johansson, Dept. of Physiology, University of Umea, Sweden
Standardization, and the creation of an ecosystem of tools
Hardware
Software
(~1890)
(~1990)
(2020s ?)
+ Applications
+ Community
Important factors:
Many many sensors in the literature:
[Wilson et al., 2019]
[Piacenza et al., 2020]
[ Fischel et al., 2012]
[Zhang et al., 2018]
[Church et al., 2019]
[Hillis, W. D. A High-Resolution Imaging Touch Sensor The International Journal of Robotics Research, 1982, 1, 33-44 ]
[Tanie, K.; Komoriya, K.; Kaneko, M.; Tachi, S. & Fujikawa, A. A high resollution tactile sensor Proc. of 4th Int. Conf. on Robot Vision and Sensory Controls, 1984, 251, 260]
[Begej, S. Planar and finger-shaped optical tactile sensors for robotic applications IEEE Journal on Robotics and Automation, 1988, 4, 472-484]
[Kamiyama, K.; Kajimoto, H.; Kawakami, N. & Tachi, S. Evaluation of a vision-based tactile sensor IEEE International Conference on Robotics and Automation (ICRA), 2004, 2, 1542-1547 ]
[Johnson, M. K. & Adelson, E. H. Retrographic sensing for the measurement of surface texture and shape Computer Vision and Pattern Recognition (CVPR), 2009, 1070-1077]
[Abad, A. C. & Ranasinghe, A. Visuotactile Sensors With Emphasis on GelSight Sensor: A Review IEEE Sensors Journal, 2020, 20, 7628-7638]
Credit:
[Yuan, W.; Dong, S. & Adelson, E. H. GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force Sensors, Multidisciplinary Digital Publishing Institute, 2017]
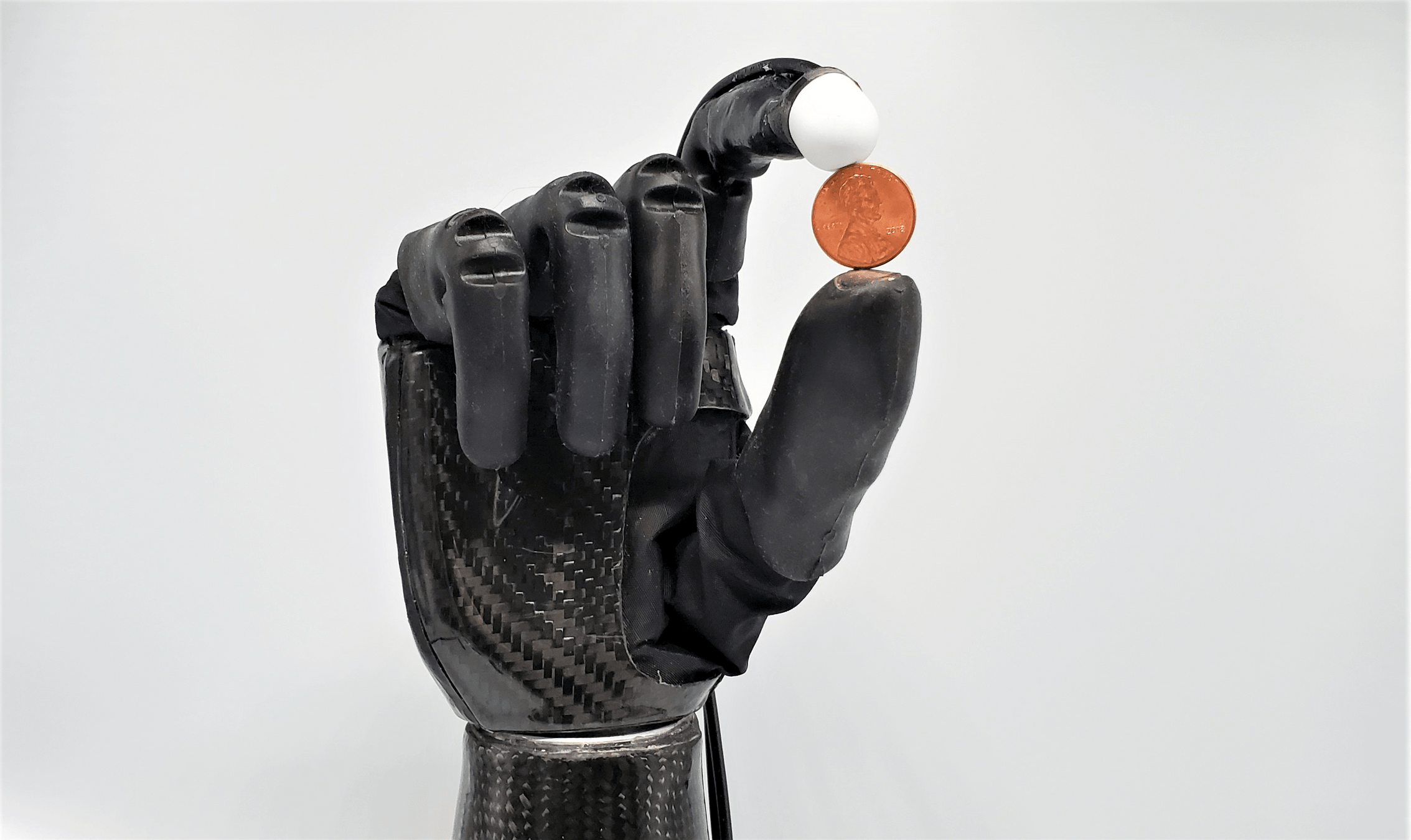
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
BioTac
DIGIT
~15,000 $
Cost
~15 $*
Resolution
29
taxels
307,200
taxels
Mounted on multi-finger hands
Open-source
1000x
Higher resolution
1000x
Cheaper
* component cost for 1000 units, not including labor
Replicated in 20+ universities
Yet, it can still be challenging to manufacture a sensor without mechanical/electrical experience
Partnership with GelSight Inc. to commercialize DIGIT
Most widespread tactile sensor in robotics!
Part of Mitsubishi Electric RAISE (Robotics as an Intelligent Services Ecosystem)
Padmanabha, A.; Ebert, F.; Tian, S.; Calandra, R.; Finn, C.; Levine, S.
OmniTact: A Multi-Directional High-Resolution Touch Sensor
IEEE International Conference on Robotics and Automation (ICRA) , 2020
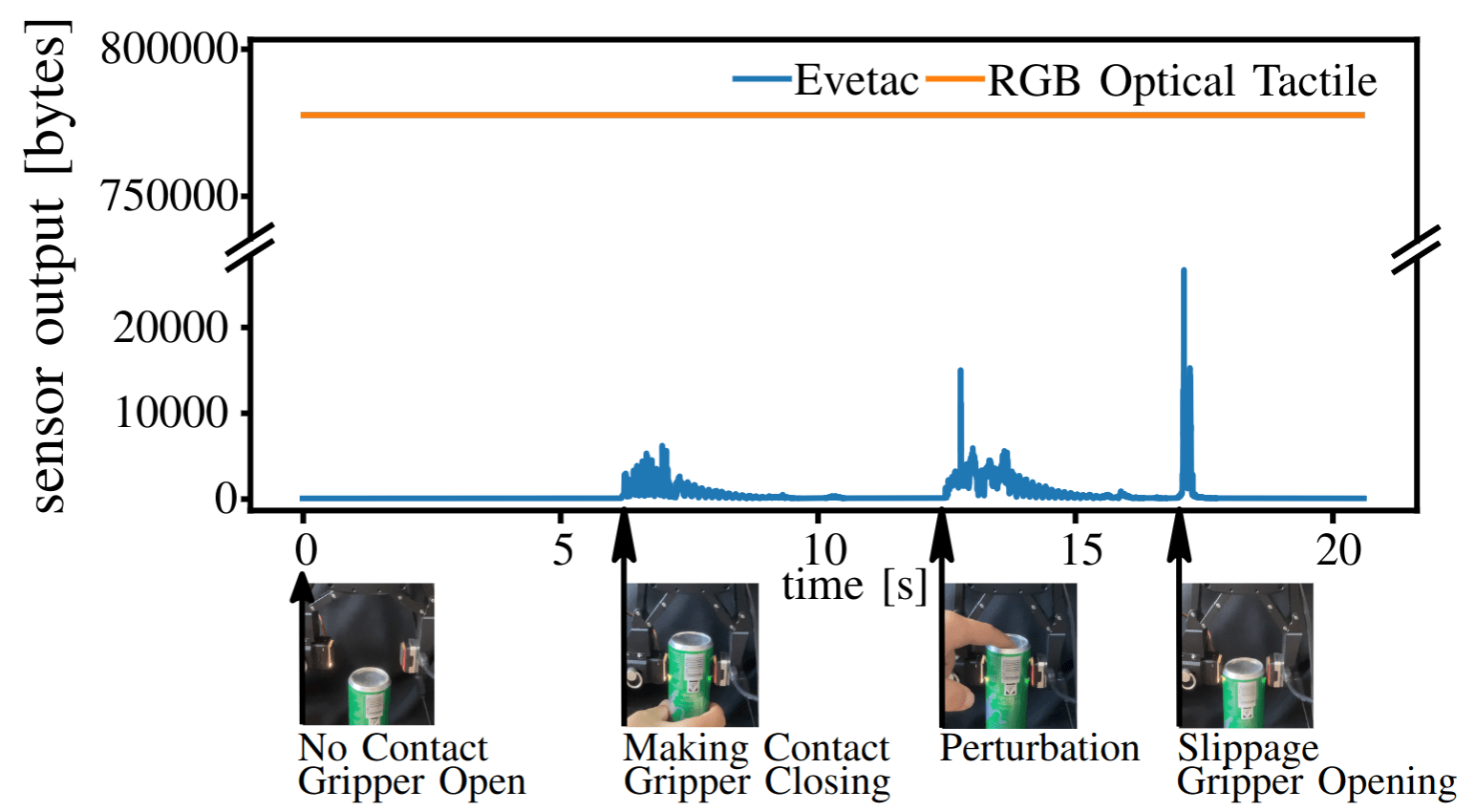
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Under Review, 2023 https://arxiv.org/abs/2312.01236
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Accepted to T-RO, 2023 https://arxiv.org/abs/2312.01236
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Accepted to T-RO, 2023 https://arxiv.org/abs/2312.01236
12%
1.7% over
entire
trajectory
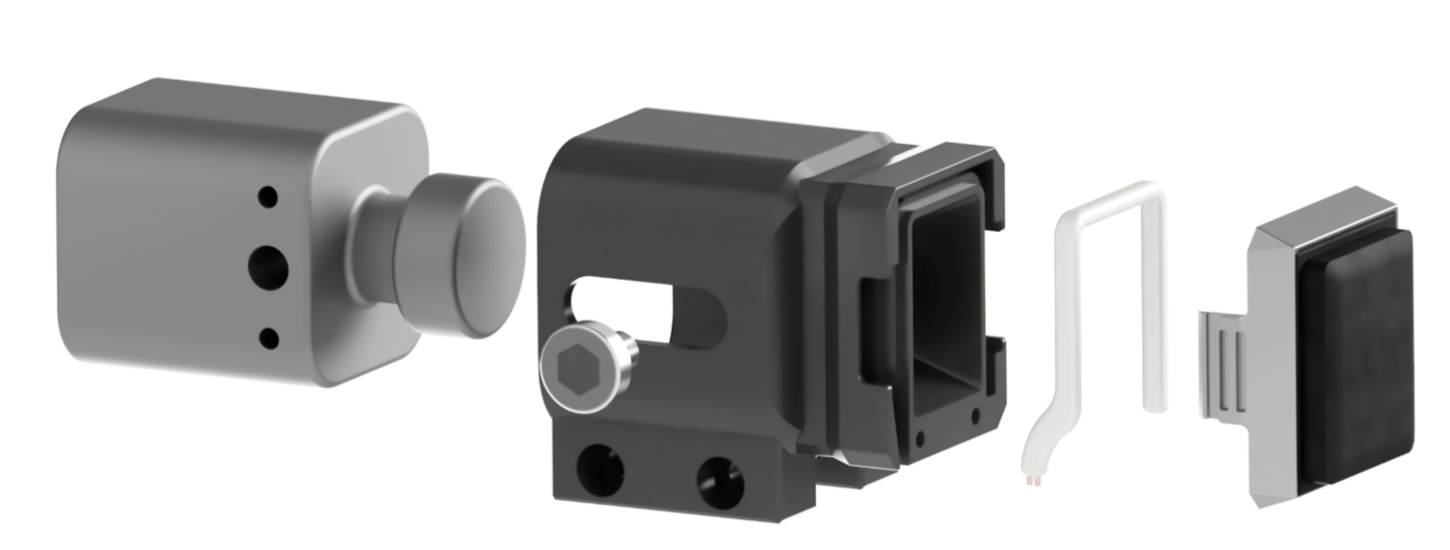
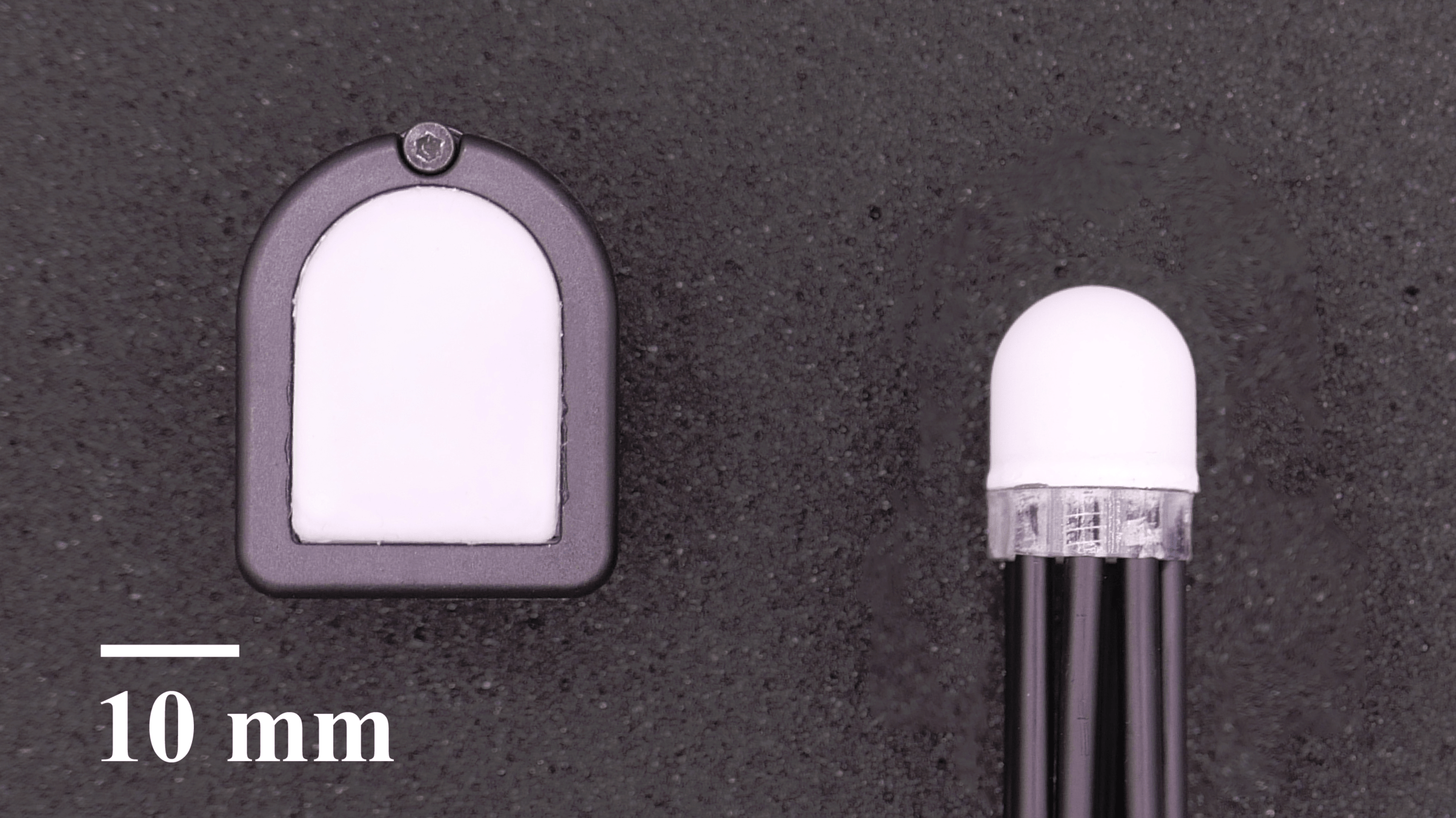
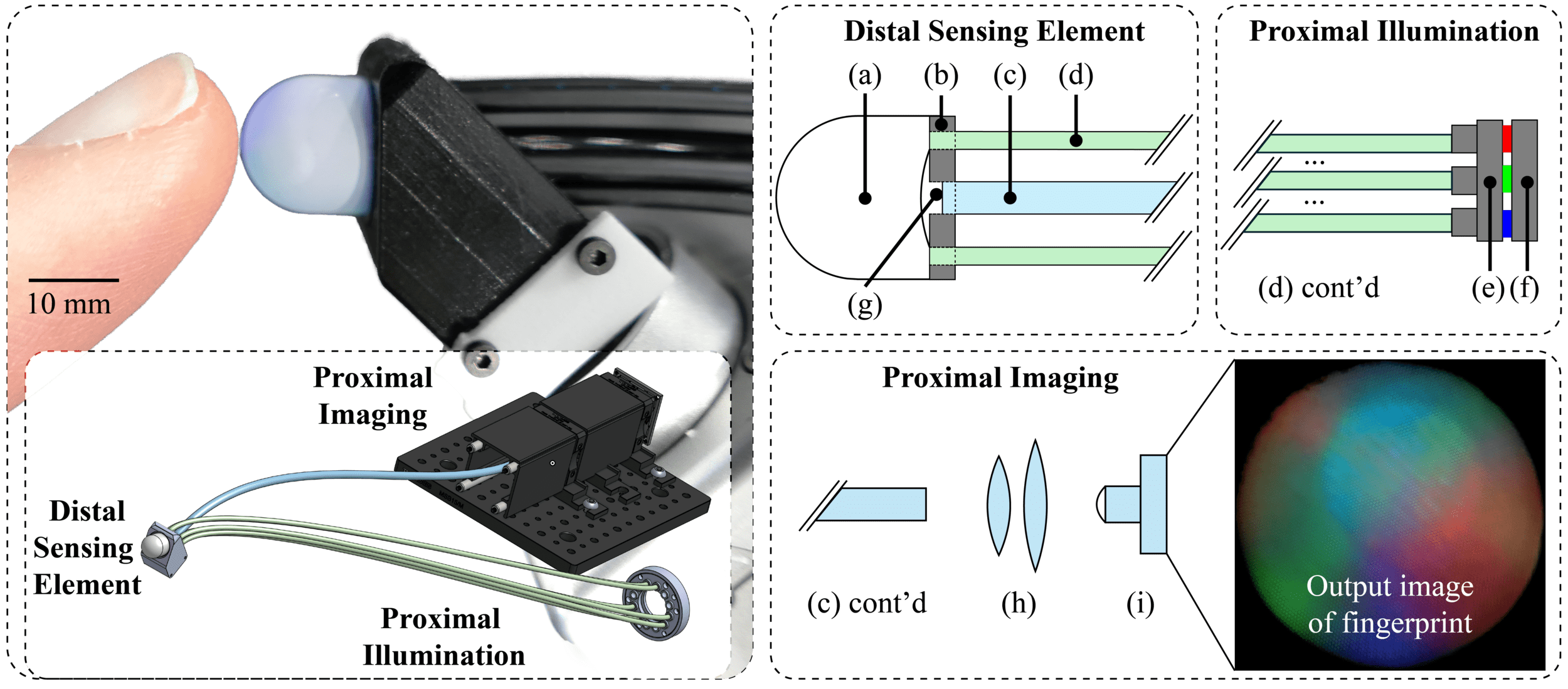
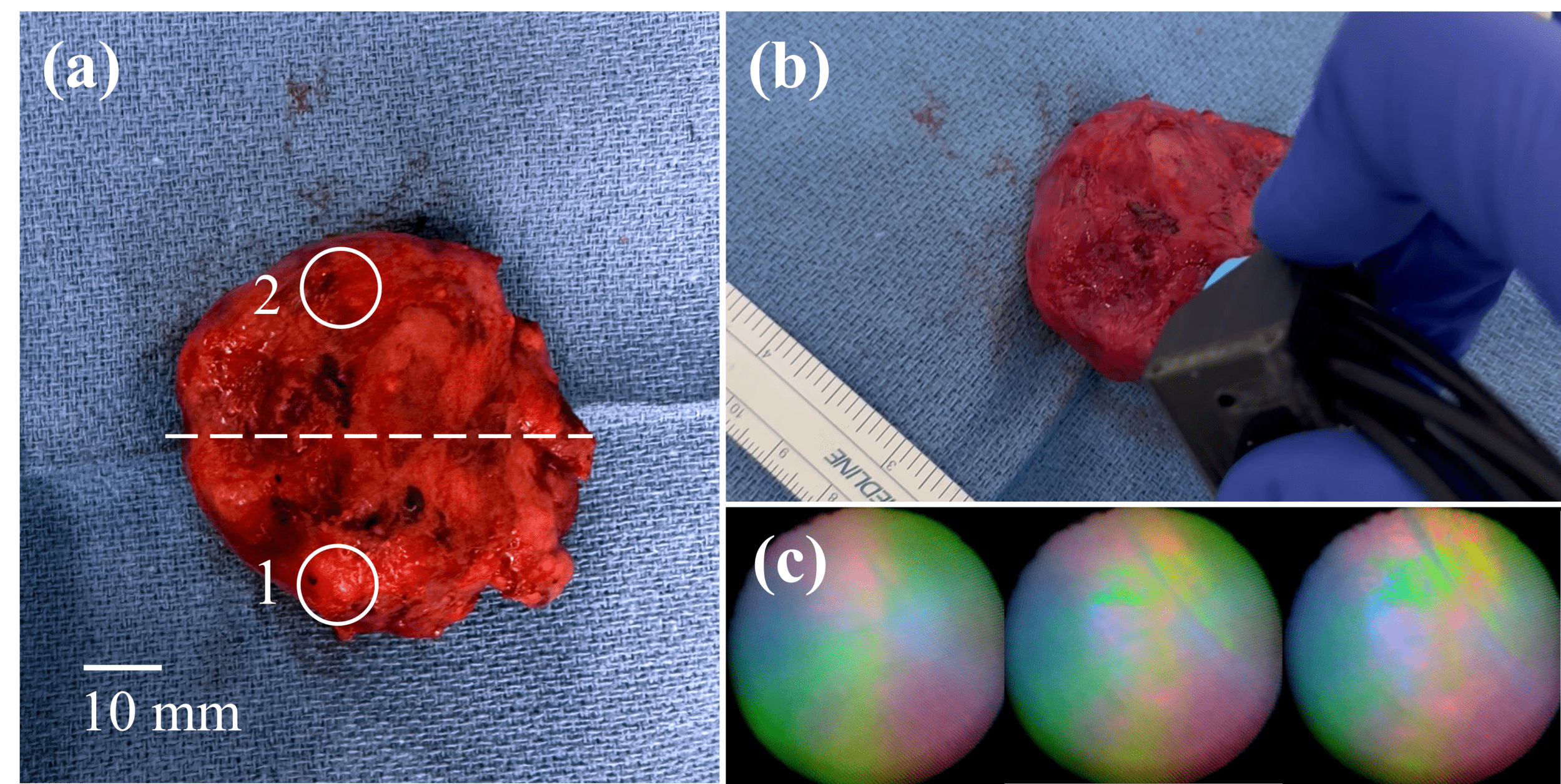
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
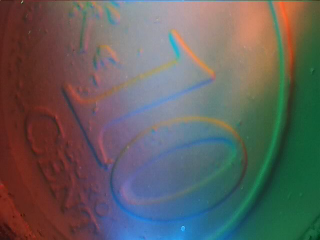
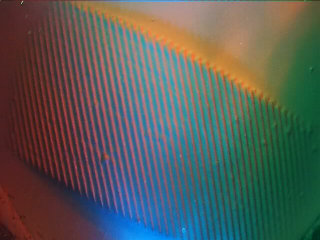
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Accepted to IEEE Transactions on Robotics (T-RO), 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Accepted to IEEE Transactions on Robotics (T-RO), 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Accepted to IEEE Transactions on Robotics (T-RO), 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Accepted to IEEE Transactions on Robotics (T-RO), 2024 https://arxiv.org/abs/2403.05500
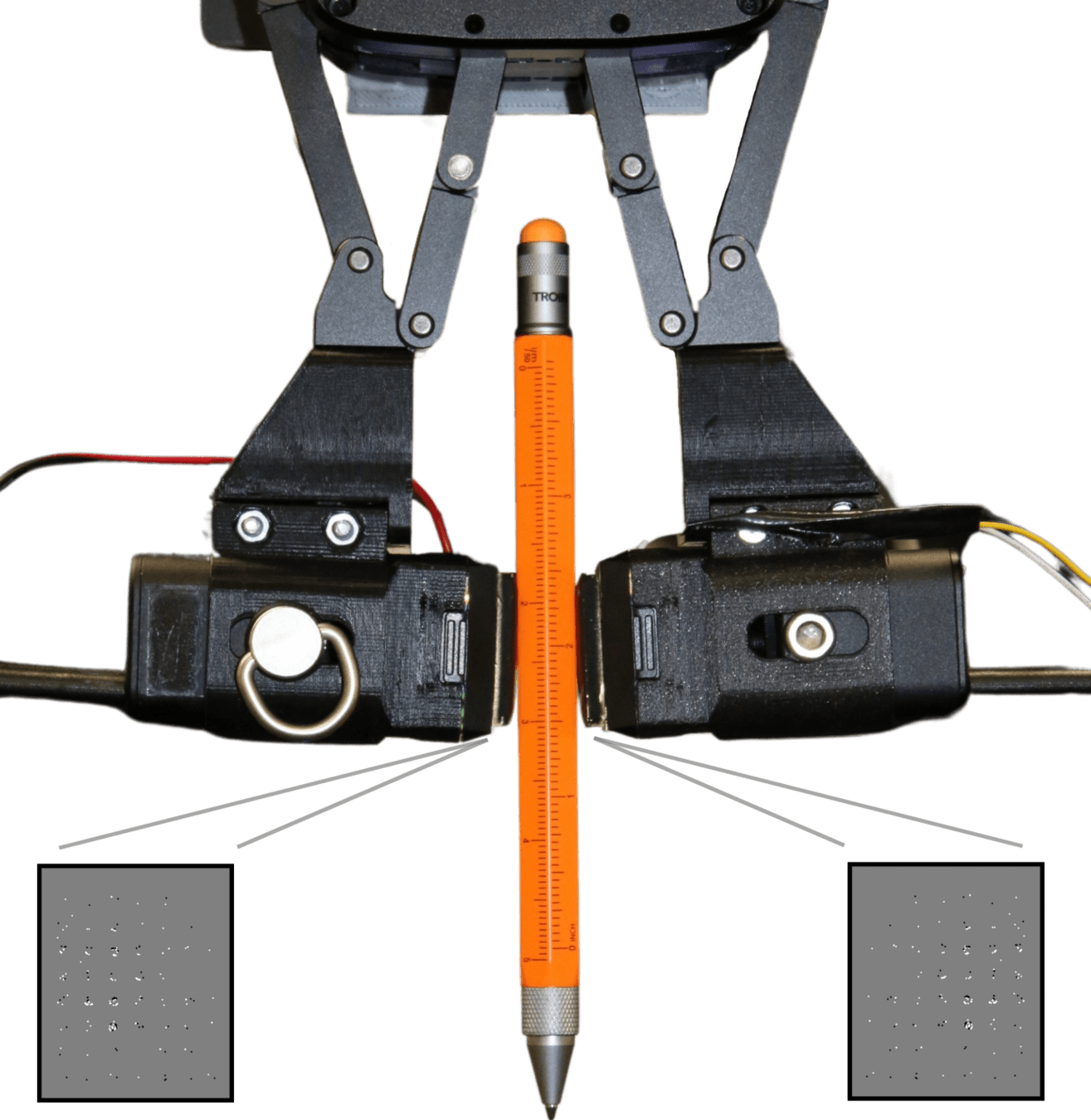
Cancer
No Cancer
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Accepted to IEEE Transactions on Robotics (T-RO), 2024 https://arxiv.org/abs/2403.05500
Some of the open questions:
Very limited literature about computational processing of touch sensing
Goal: Create the equivalent of OpenCV for Touch
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021
Kerr, J.; Huang, H.; Wilcox, A.; Hoque, R.; Ichnowski, J.; Calandra, R. & Goldberg, K.
Self-Supervised Visuo-Tactile Pretraining to Locate and Follow Garment Features
Robotics: Science and Systems (RSS) 2023, Online: https://arxiv.org/pdf/2209.13042
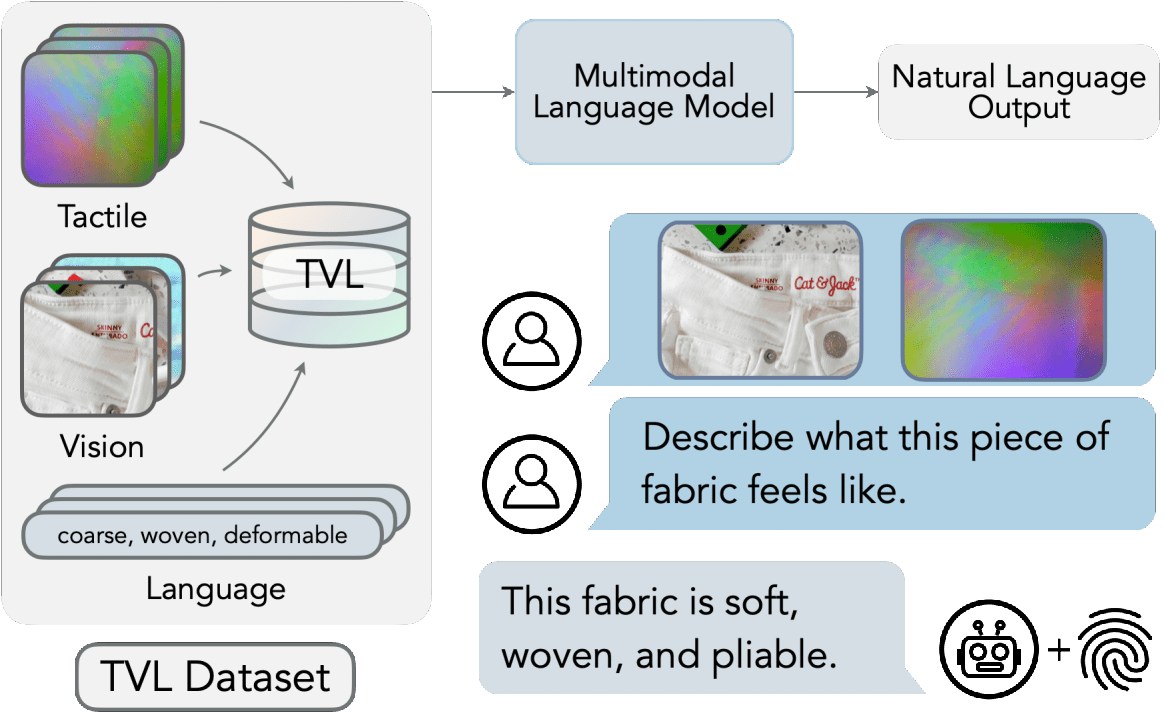
Fu, L.; Datta, G.; Huang, H.; Panitch, W. C.-H.; Drake, J.; Ortiz, J.; Mukadam, M.; Lambeta, M.; Calandra, R. & Goldberg, K.
A Touch, Vision, and Language Dataset for Multimodal Alignment
ICML 2024 https://arxiv.org/abs/2402.13232
Suresh, S.; Qi, H.; Wu, T.; Fan, T.; Pineda, L.; Lambeta, M.; Malik, J.; Kalakrishnan, M.; Calandra, R.; Kaess, M.; Ortiz, J. & Mukadam, M.
Neural feels with neural fields: Visuo-tactile perception for in-hand manipulation
Under Review, 2023 https://arxiv.org/abs/2312.13469
Robotics
Metaverse
(AR/VR)
E-commerce
Medical
Predicting Grasp Stability
[Calandra et al. 2017]
Learning how to (Re)Grasp
[Calandra et al. 2018]
Active Tactile Exploration
[Yi at al. 2016]
3D Reconstruction from Vision and Touch
[Smith et al. 2020; Smith et al. 2021]
Identify Objects from Touch
[Lin et al. 2019]
Learning to Play Piano from Touch
[Xu at al. 2022]
Calandra, R.; Owens, A.; Jayaraman, D.; Yuan, W.; Lin, J.; Malik, J.; Adelson, E. H. & Levine, S.
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
IEEE Robotics and Automation Letters (RA-L), 2018, 3, 3300-3307
Collected 6450 grasps from over 60 training objects over ~2 weeks.
83.8% grasp success on 22 unseen objects
(using only vision yields 56.6% success rate)
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
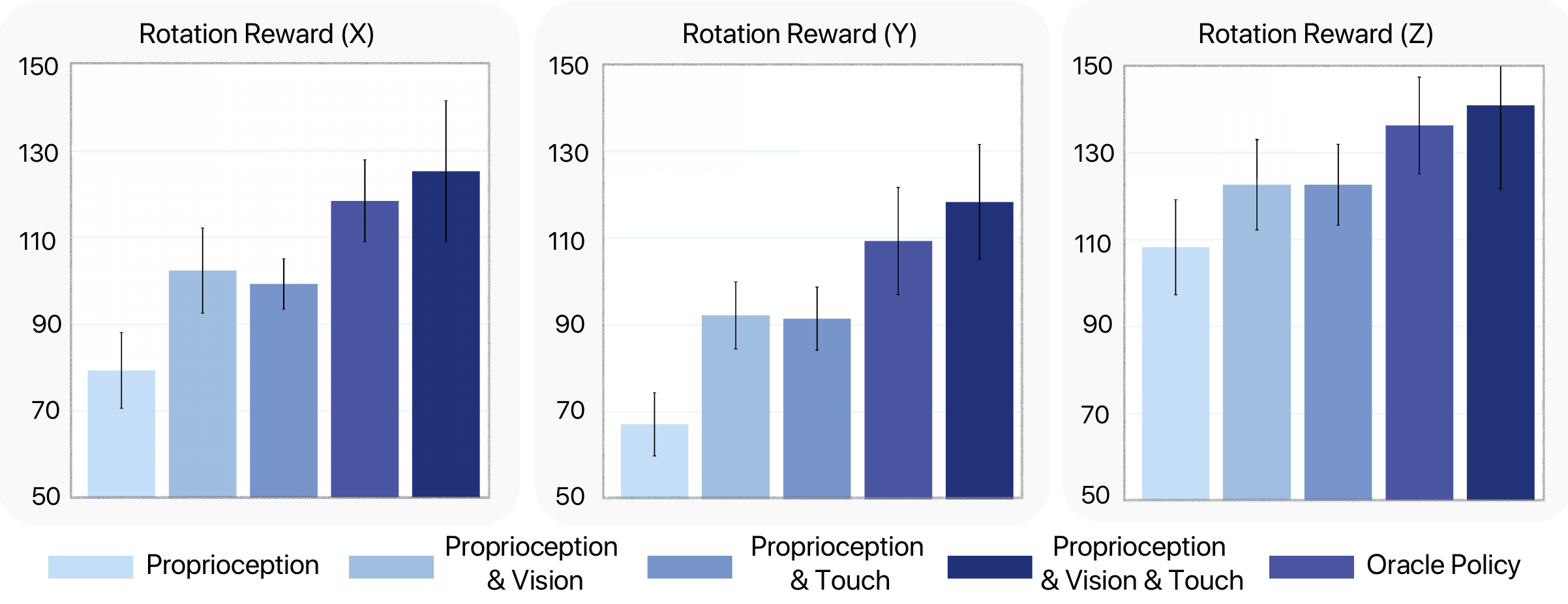
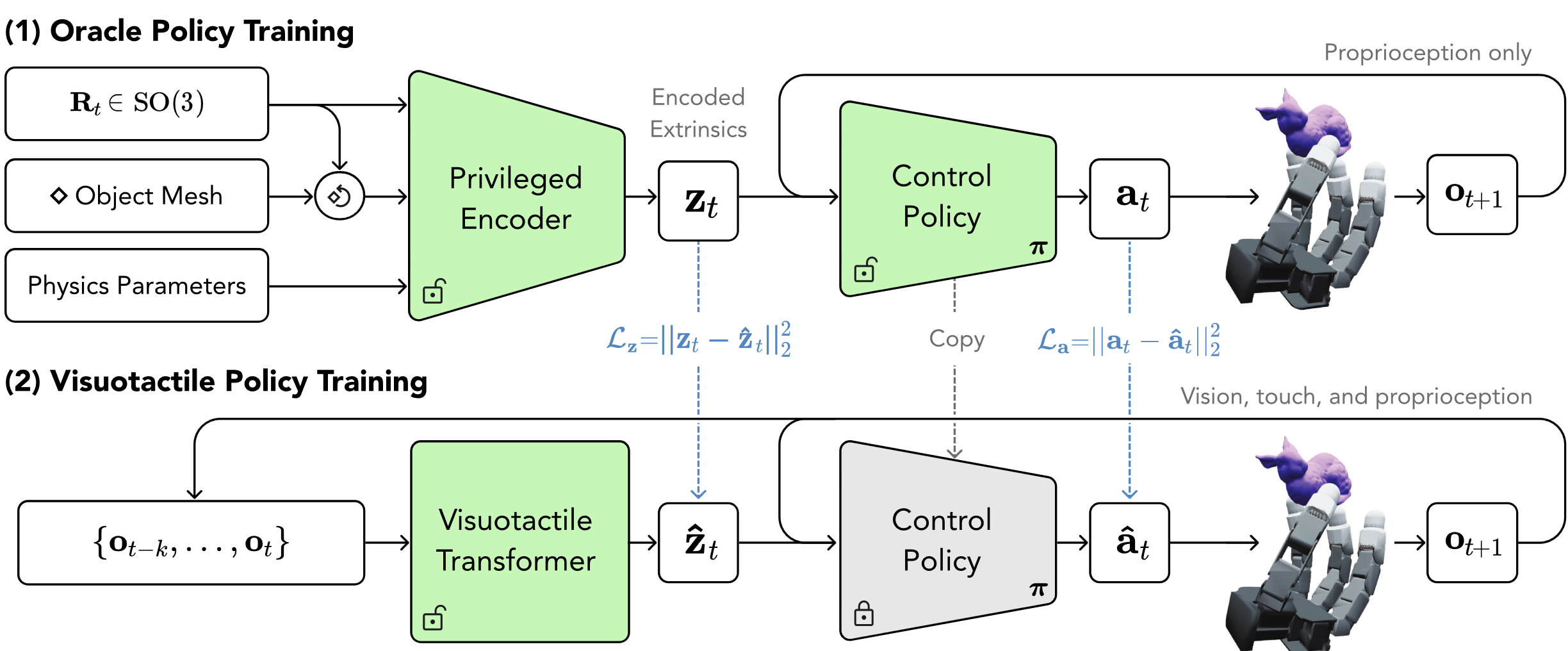
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Multi-modal Sensing
Adaptive Hardware configuration
Quick adaptation to new tasks
Touch Sensing
Morphological adaptation
Model-based
Reinforcement Learning
Hardware
Software
Humans seem to make extensive use of models for planning and control *
(e.g., to predict the effects of our actions)
Can Robots learn and use models of the world?
Hyphothesis: better predictive capabilities will lead to more efficient adaptation
* [Kawato, M. Internal models for motor control and trajectory planning Current Opinion in Neurobiology , 1999, 9, 718 - 727],
[Gläscher, J.; Daw, N.; Dayan, P. & O'Doherty, J. P. States versus rewards: dissociable neural prediction error signals underlying model-based and model-free reinforcement
learning Neuron, Elsevier, 2010, 66, 585-595]
+
predictive models allow us to peek into the beliefs of our models
and explain their decisions
Calandra, R.; Seyfarth, A.; Peters, J. & Deisenroth, M. P.
Bayesian Optimization for Learning Gaits under Uncertainty
Annals of Mathematics and Artificial Intelligence (AMAI), 2015, 76, 5-23
Not Symmetrical (about 5° difference). Why?
Because it is walking in a circle!
Chua, K.; Calandra, R.; McAllister, R. & Levine, S.
Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models
Advances in Neural Information Processing Systems (NIPS), 2018, 4754-4765
Chua, K.; Calandra, R.; McAllister, R. & Levine, S.
Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models
Advances in Neural Information Processing Systems (NIPS), 2018, 4754-4765
Chua, K.; Calandra, R.; McAllister, R. & Levine, S.
Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models
Advances in Neural Information Processing Systems (NIPS), 2018, 4754-4765
Lambert, N.O.; Drew, D.S.; Yaconelli, J; Calandra, R.; Levine, S.; & Pister, K.S.J.
Low Level Control of a Quadrotor with Deep Model-Based Reinforcement Learning
IEEE Robotics and Automation Letters (RA-L), 2019, 4, 4224-4230
Belkhale, S.; Li, R.; Kahn, G.; McAllister, R.; Calandra, R. & Levine, S.
Model-Based Meta-Reinforcement Learning for Flight with Suspended Payloads
IEEE Robotics and Automation Letters (RA-L), 2021, 6, 1471-1478
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Lambert, N.; Wilcox, A.; Zhang, H.; Pister, K. S. J. & Calandra, R.
Learning Accurate Long-term Dynamics for Model-based Reinforcement Learning
IEEE Conference on Decision and Control (CDC), 2021
(YES)
Zhang, B.; Rajan, R.; Pineda, L.; Lambert, N.; Biedenkapp, A.; Chua, K.; Hutter, F. & Calandra, R.
On the Importance of Hyperparameter Optimization for Model-based Reinforcement Learning
International Conference on Artificial Intelligence and Statistics (AISTATS), 2021
(YES)
Bansal, S.; Calandra, R.; Xiao, T.; Levine, S. & Tomlin, C. J.
Goal-Driven Dynamics Learning via Bayesian Optimization
IEEE Conference on Decision and Control (CDC), 2017, 5168-5173
(NO)
(NO)
Lambert, N.; Amos, B.; Yadan, O. & Calandra, R.
Objective Mismatch in Model-based Reinforcement Learning
Learning for Dynamics and Control (L4DC), 2020, 761-770
Negative Log-Likelihood
Task Reward
[Lambert, N.; Amos, B.; Yadan, O. & Calandra, R. Objective Mismatch in Model-based Reinforcement Learning Learning for Dynamics and Control (L4DC), 2020, 761-770]
[Wei R., Lambert N., McDonald A., Garcia A., and Calandra R. 2024. “A Unified View on Solving Objective Mismatch in Model-Based Reinforcement Learning.” Transactions on Machine Learning Research (TMLR). https://arxiv.org/abs/2310.06253.]
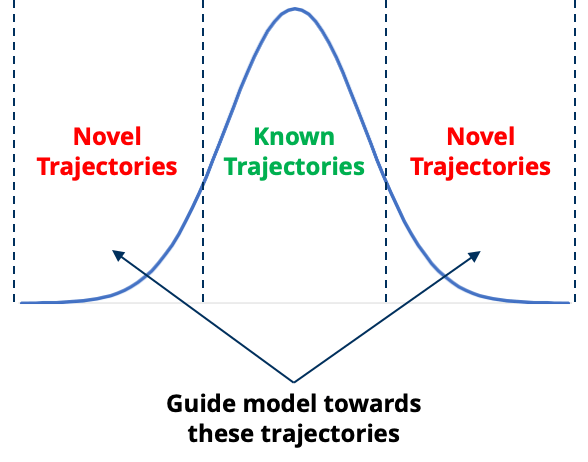
Can we use Diffusion Models to guide exploration and achieve open-endedness in RL?
Hughes et al., 2024 - Open-Endedness is Essential for Artificial Superhuman Intelligence
Jiang et al., 2022 - General intelligence requires rethinking exploration
+
=
Open-Endedness?
Contact: elia.ruehle@mailbox.tu-dresden.de
Janner et al., 2022 - Planning with Diffusion for Flexible Behaviour Synthesis
Ajay et al., 2023 - Is Conditional Generative Modelling all you need for Decision-Making?
Contact: elia.ruehle@mailbox.tu-dresden.de
Multi-modal Sensing
Adaptive Hardware configuration
Quick adaptation to new tasks
Touch Sensing
Morphological adaptation
Model-based
Reinforcement Learning
Hardware
Software
Liao, T.; Wang, G.; Yang, B.; Lee, R.; Pister, K.; Levine, S. & Calandra, R.
Data-efficient Learning of Morphology and Controller for a Microrobot
IEEE International Conference on Robotics and Automation (ICRA), 2019
Thomas L., Wang G., Yang B., Lee R., Pister K., Levine S., and Calandra R.
Data-Efficient Learning of Morphology and Controller for a Microrobot
IEEE International Conference on Robotics and Automation (ICRA), 2488–2494
From 21 months down to 4 months
5x faster!
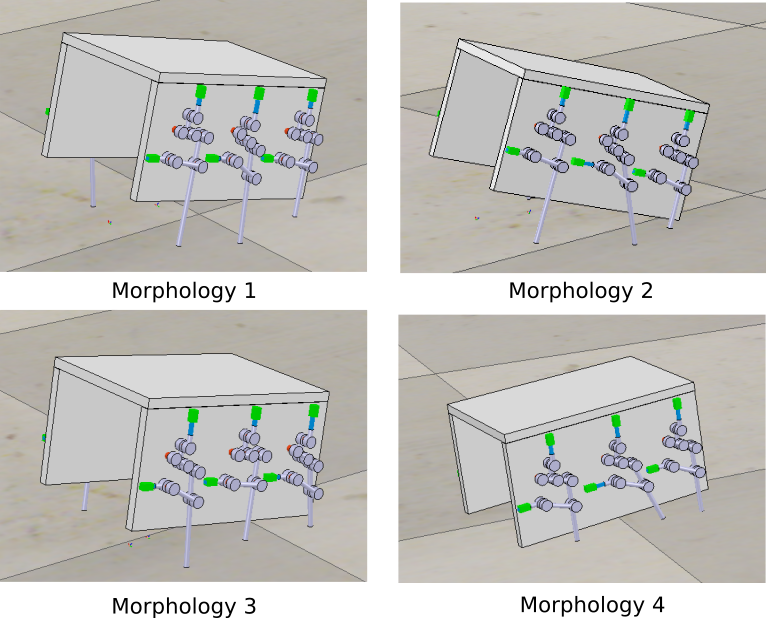
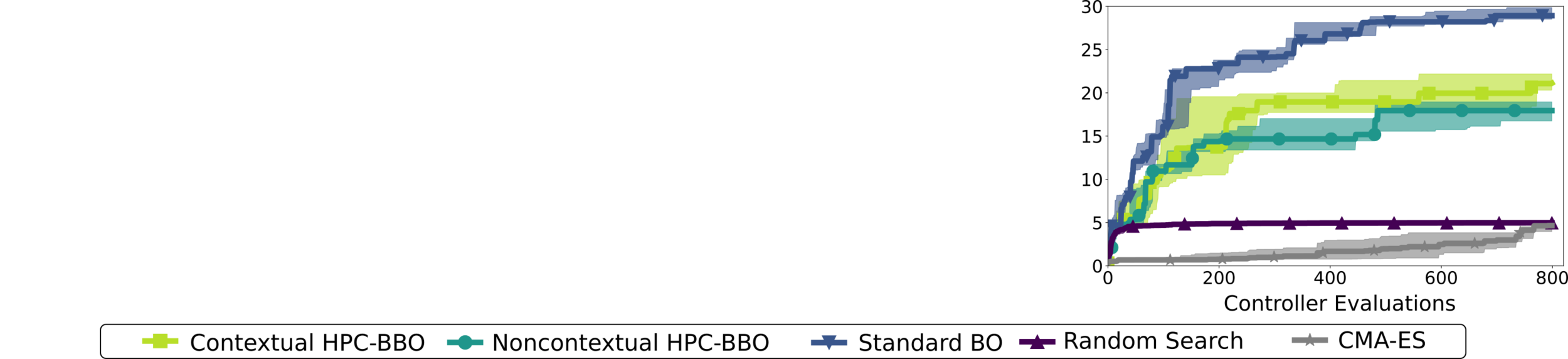
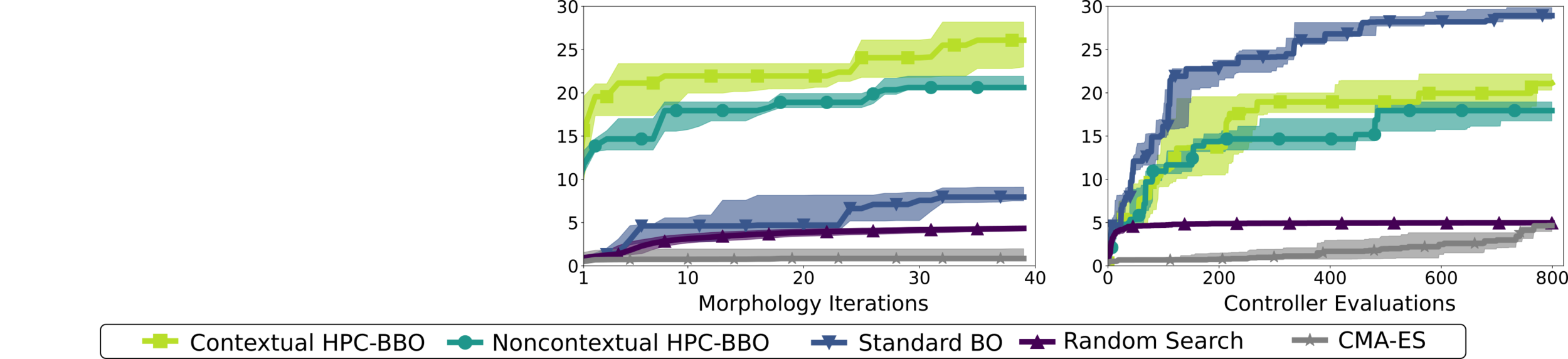
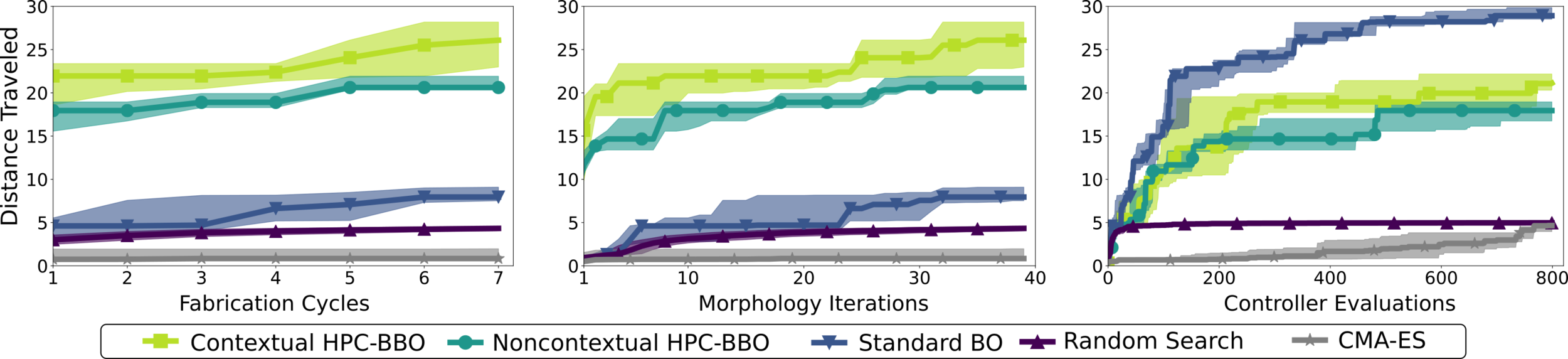
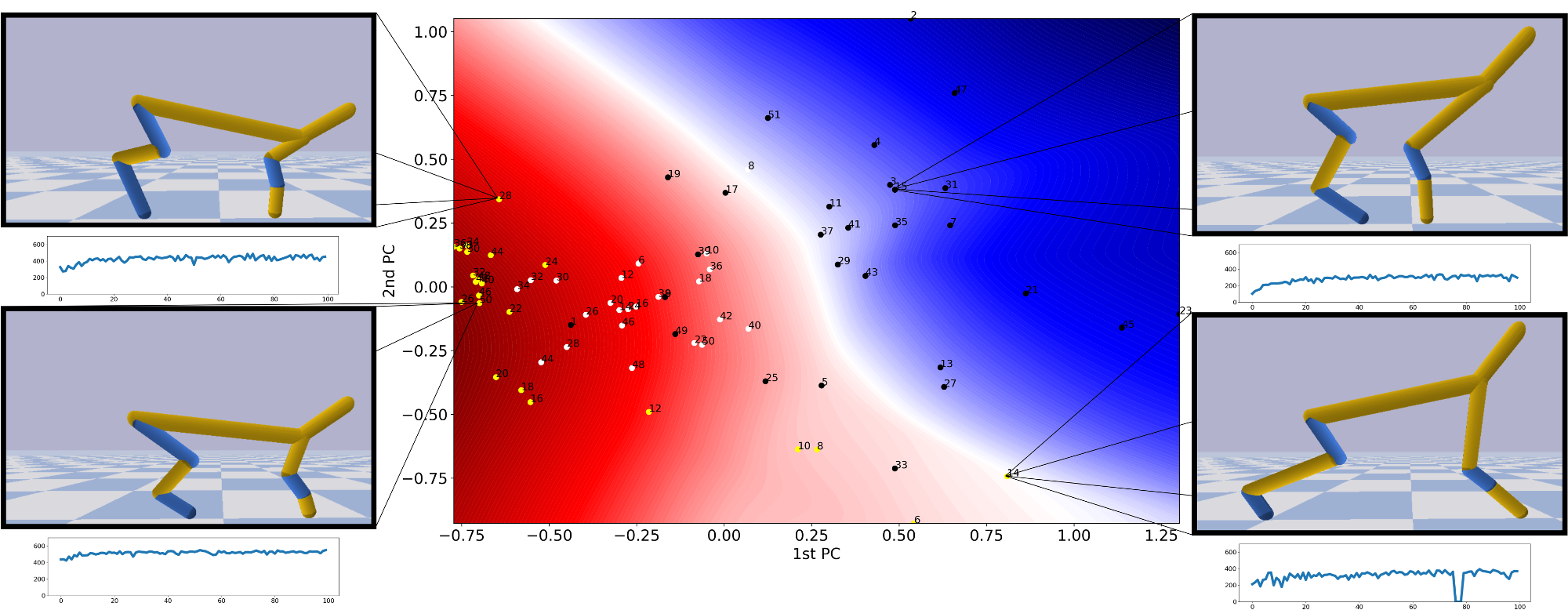
Luck, K.; Amor, H. B. & Calandra, R.
Data-efficient Co-Adaptation of Morphology and Behaviour with Deep Reinforcement Learning
Conference on Robot Learning (CORL), 2019
Supported by
Thank you!
Wang, S.; Lambeta, M.; Chou, L. & Calandra, R.
TACTO: A Fast, Flexible and Open-source Simulator for High-Resolution Vision-based Tactile Sensors
IEEE Robotics and Automation Letters (RA-L), 2022, 7, 3930-3937, Online: https://arxiv.org/abs/2012.08456
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Sense
Process
Reproduce
Fritsche, L.; Unverzagt, F.; Peters, J. & Calandra, R.
First-Person Tele-Operation of a Humanoid Robot
IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), 2015
Calandra, R.; Owens, A.; Upadhyaya, M.; Yuan, W.; Lin, J.; Adelson, E. H. & Levine, S.
The Feeling of Success: Does Touch Sensing Help Predict Grasp Outcomes?
Conference on Robot Learning (CORL), 2017, 314-323
Cannata, G.; Maggiali, M.; Metta, G. & Sandini, G.
An embedded artificial skin for humanoid robots
IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2008, 434-438
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Xu, H.; Luo, Y.; Wang, S.; Darrell, T. & Calandra, R.
Towards Learning to Play Piano with Dexterous Hands and Touch
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2022, online: https://arxiv.org/abs/2106.02040
Qi, H.; Kumar, A.; Calandra, R.; Ma, Y. & Malik J.
In-Hand Object Rotation via Rapid Motor Adaptation
Conference on Robot Learning (CORL), 2022, https://arxiv.org/abs/2210.04887
More force = better grasp
But not always ?
Calandra, R.; Owens, A.; Jayaraman, D.; Yuan, W.; Lin, J.; Malik, J.; Adelson, E. H. & Levine, S.
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
IEEE Robotics and Automation Letters (RA-L), 2018, 3, 3300-3307
By Roberto Calandra




