Concepts
Robotique
La grande
bataille
des concepts
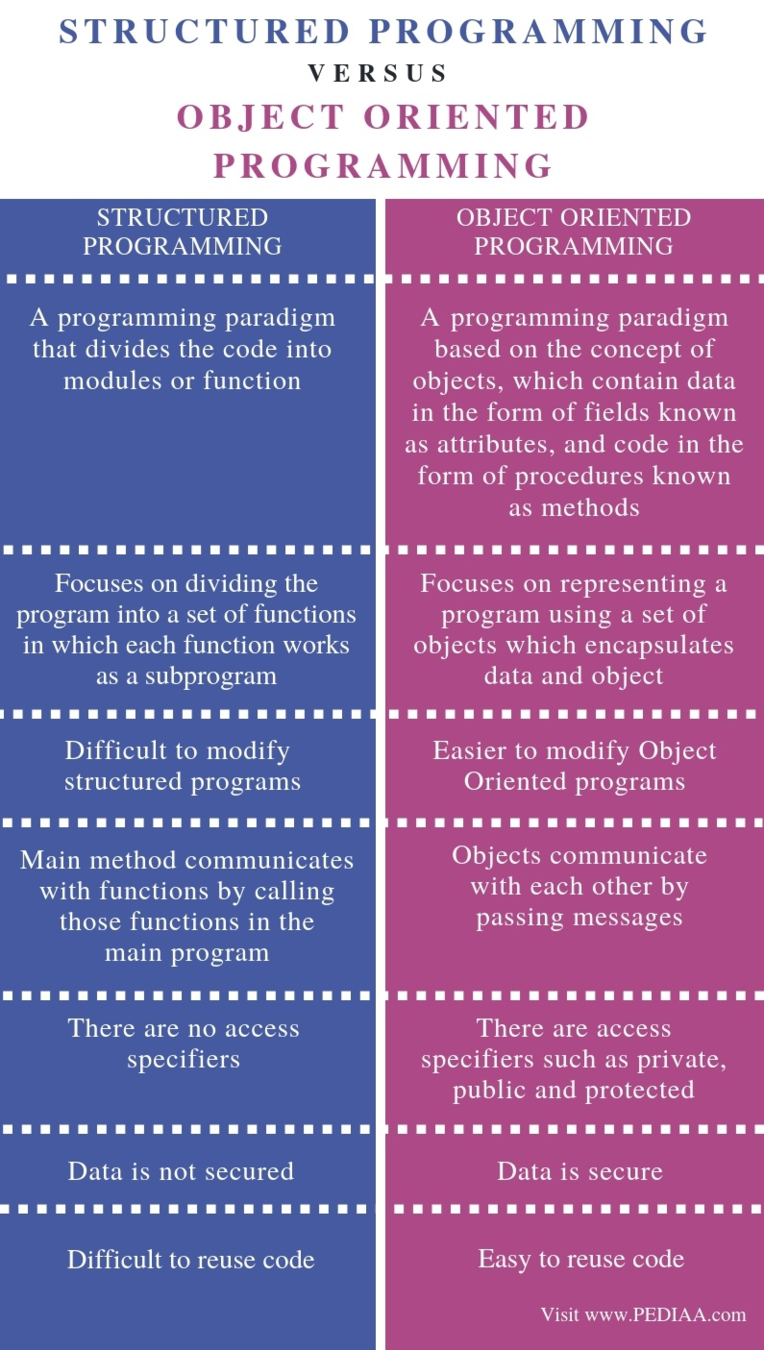
Function prog. VS Object prog.
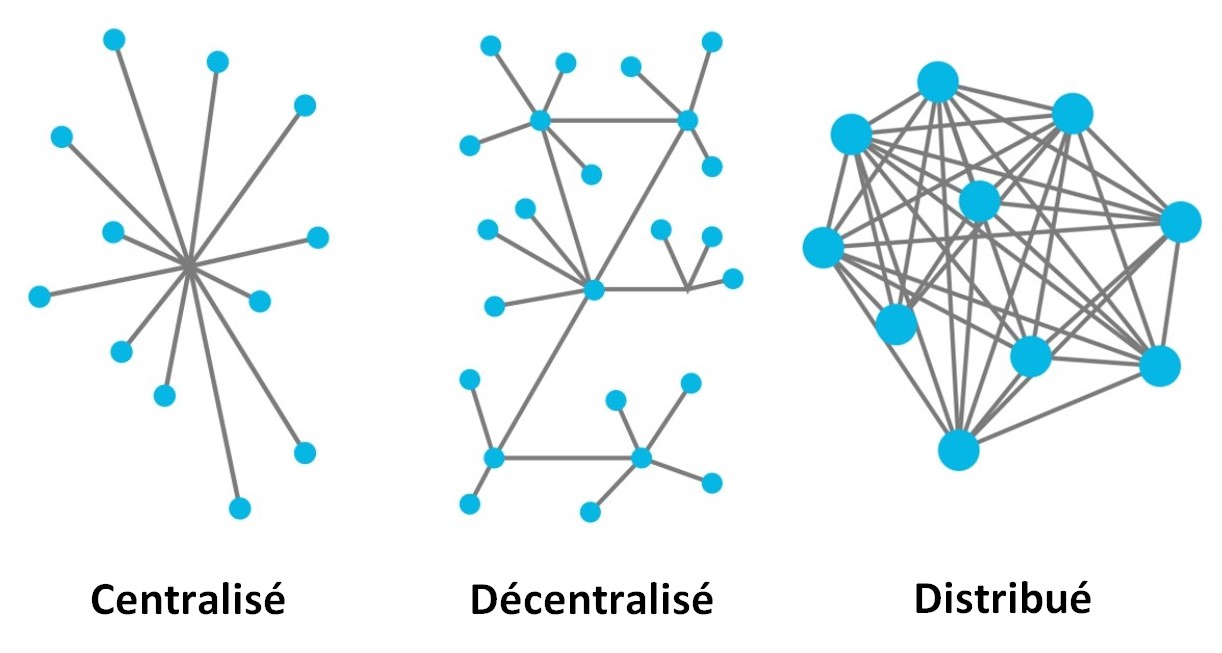
Centralisé VS décentralisé vs distribué
Réseau banquaire
Crypto monaie
internet
Monolitic VS Microservices
Tout en un. une unique application

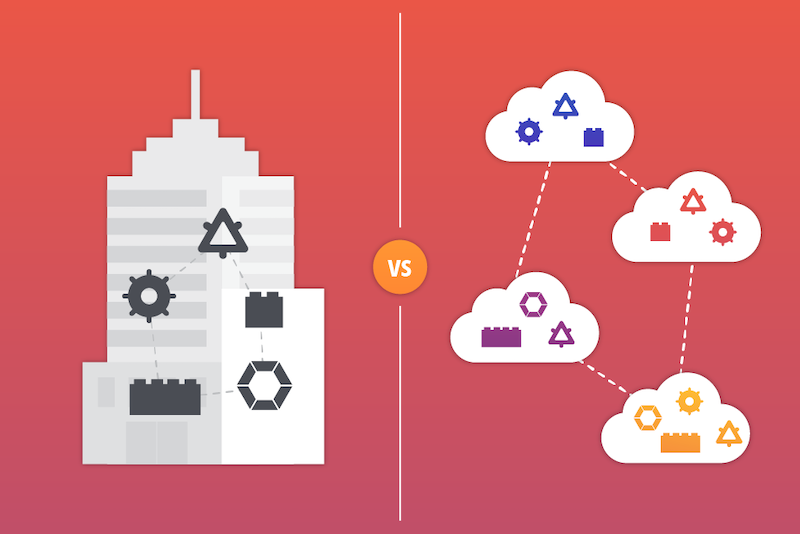
Découplage des
responsabilités entre applications
Les enjeux
de la robotique


Déplacement
Acquisition
Autonomie
Action
Décision
Mission
IA
Apprentissage
Communication
Maître / esclave
Energétique
Meute
Réseau Mesh
Configuration
capteurs
Action
Charge utiles
stockage des données
Coopération
Sécurité
Environnement proche
Intégrité du système
Cybersécurité
Déplacement
Décision
Environnement proche
Communication interne
Publish / Subscribe
MQTT
Rabbit MQ
ROS pub/sub
Pika
Pypubsub
En Python
Utilise la plupart du temps un Médiateur
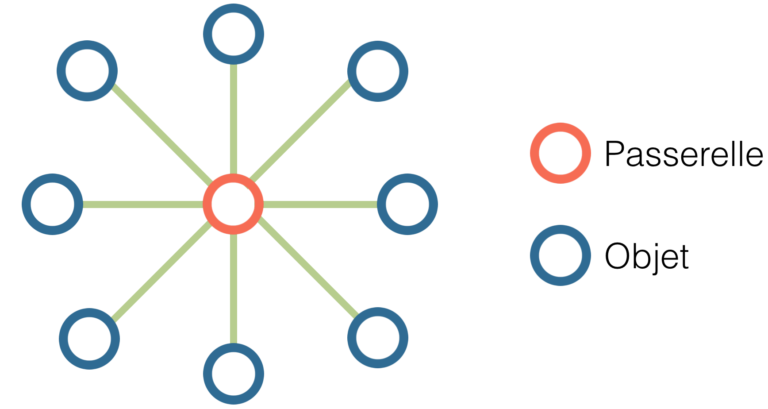
Communication externe
Passerelles
Publish / Subscribe
Radio HF
Wifi
Bluetooth
GSM/2G/3G/4G/5G
NFC
ZibBee
LiFi
Ethernet
Fibre Optique
USB
CAN
Midi
CPL
Com RS-232
Filaire
Sans Fil
Protocoles de destination
Acquisition
Virtualiser les senseurs
Mission
Lire des fichiers de configuration
YAML
JSON
XML
TOML
ConfigParser
(beurk)
La mission doit pouvoir être descriptive, et décrite dans un ou plusieurs fichiers de configuration
Les conceptes de programmation liés à la robotique
By Rémy Guillo du Bodan

