Mean-field description
of some
Deep Neural Networks
Dyego Araújo
Roberto I. Oliveira
Daniel Yukimura

What do deep neural nets do?
Why do they not overfit?
Natural tangent kernel
- DNN learning is kernel learning: convex & convergent.
- Kernel is determined by nonlinearities.
Mean-field particle system
- Shallow networks perform gradient descent over densities.
- PDE determined by nonlinearities.
Overparameterization \[\Rightarrow\] Law of Large Numbers for SGD \[\Rightarrow\] study convergence
Mean-field particles for DNN?
Overparameterization \[\Rightarrow\] Law of Large Numbers for SGD \[\Rightarrow\] study convergence one day
Our setting
- Full connections.
- All internal layers with large, but similar, # of neurons.
- Weights from input to first layer are random features (not learned).
- Weights from last layer to output also not learned.
Extensions I'm 90% sure about
- Sparser connections with diverging degrees.
- Learned weights between input and 1st hidden if input has i.i.d. coordinates.
(50% sure we can probably drop i.i.d. assumption.)
Our networks
Independent random initialization of weights
Our networks

Independent random initialization of weights
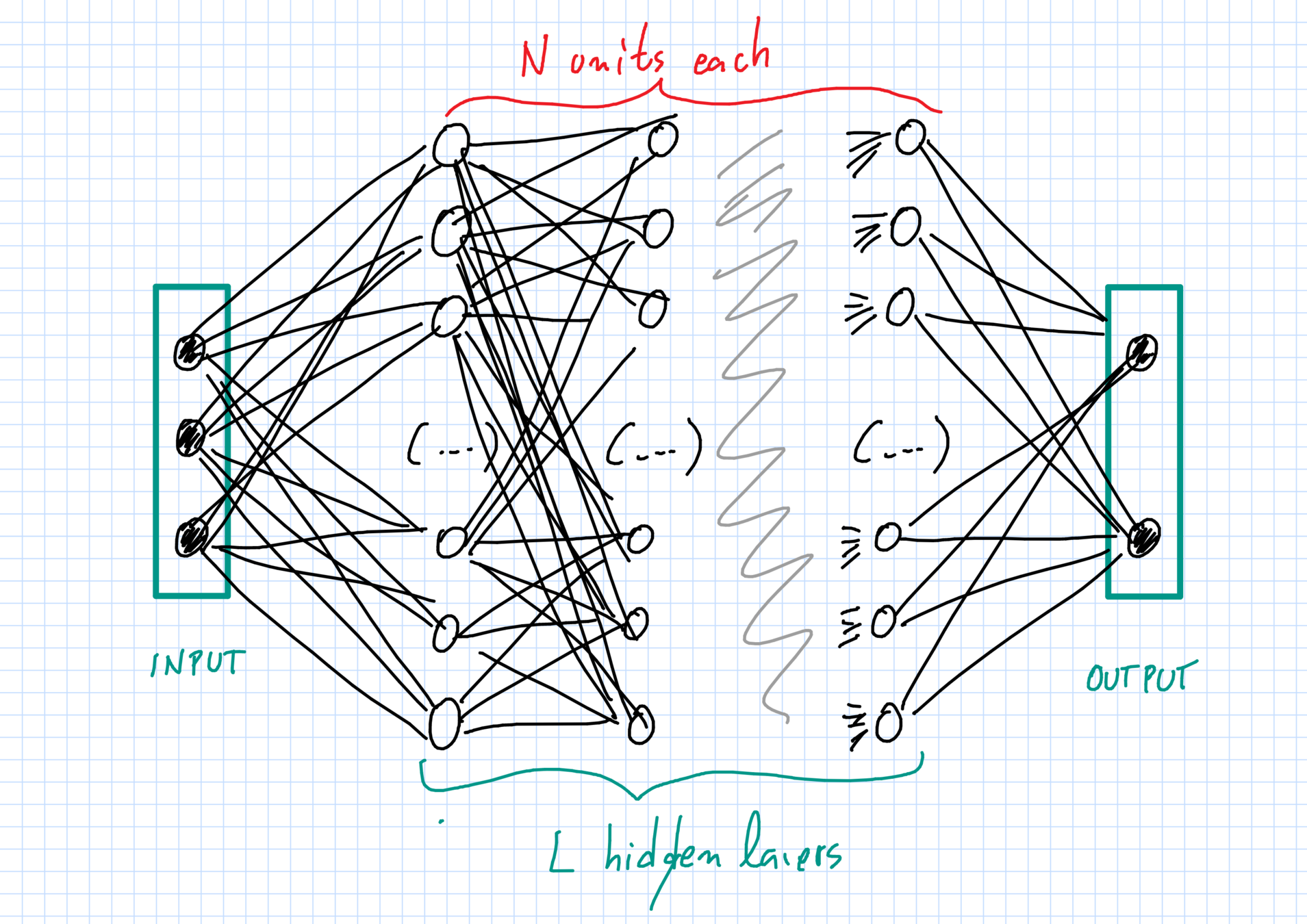
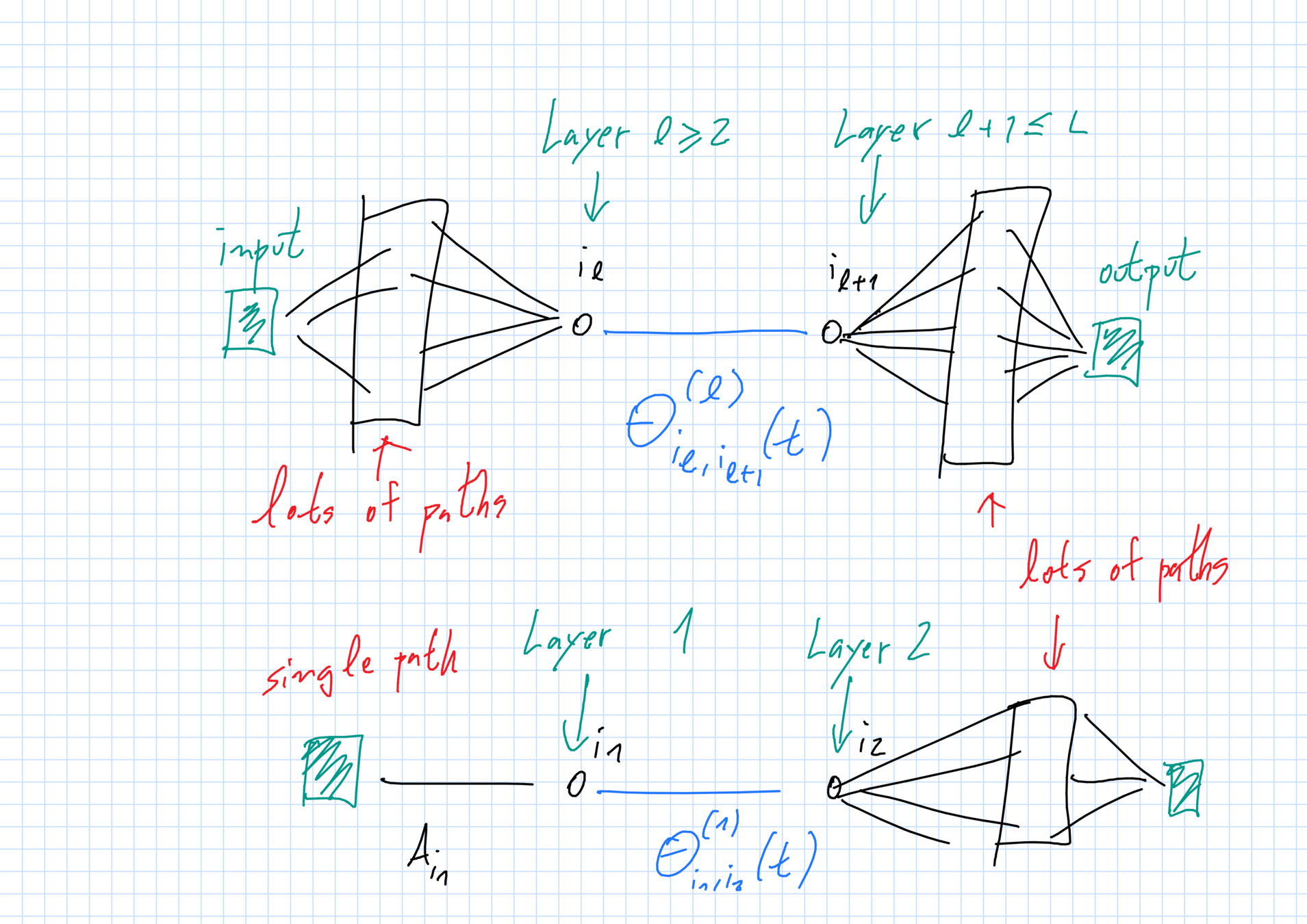
The network: layers & units
Layers \(\ell=0,1,\dots,L,L+1\):
- \(\ell=0\) input and \(\ell=L+1\) output;
- \(\ell=1,\dots,L\) hidden layers.
Each layer \(\ell\) has \(N_\ell\) units of dimension \(d_\ell\).
- \(N_0 = N_{L+1}=1\), one input \(+\) one output unit;
- \(N_\ell=N\gg 1 \) neurons in hidden layers, with \(1\leq \ell\leq L\).
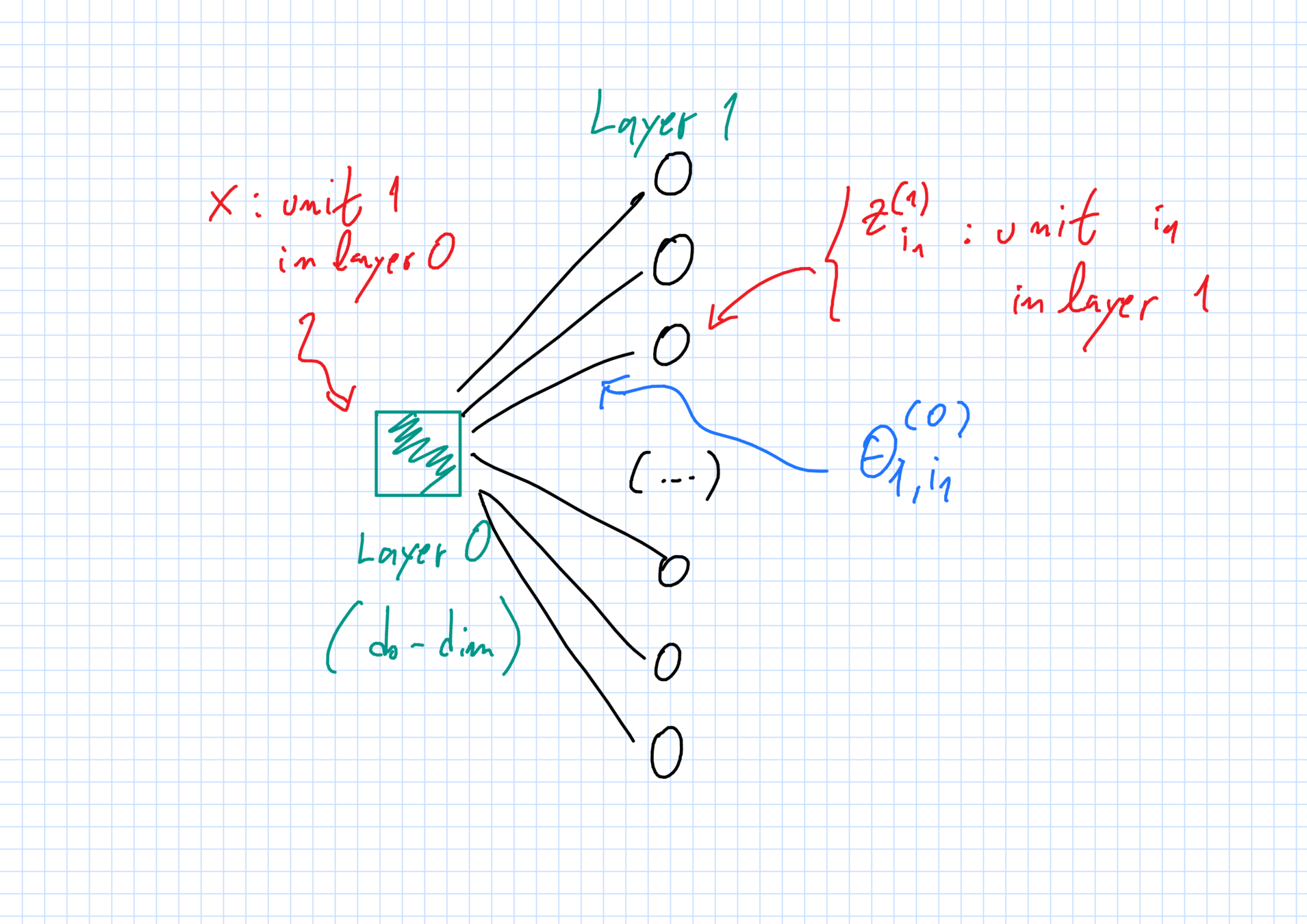
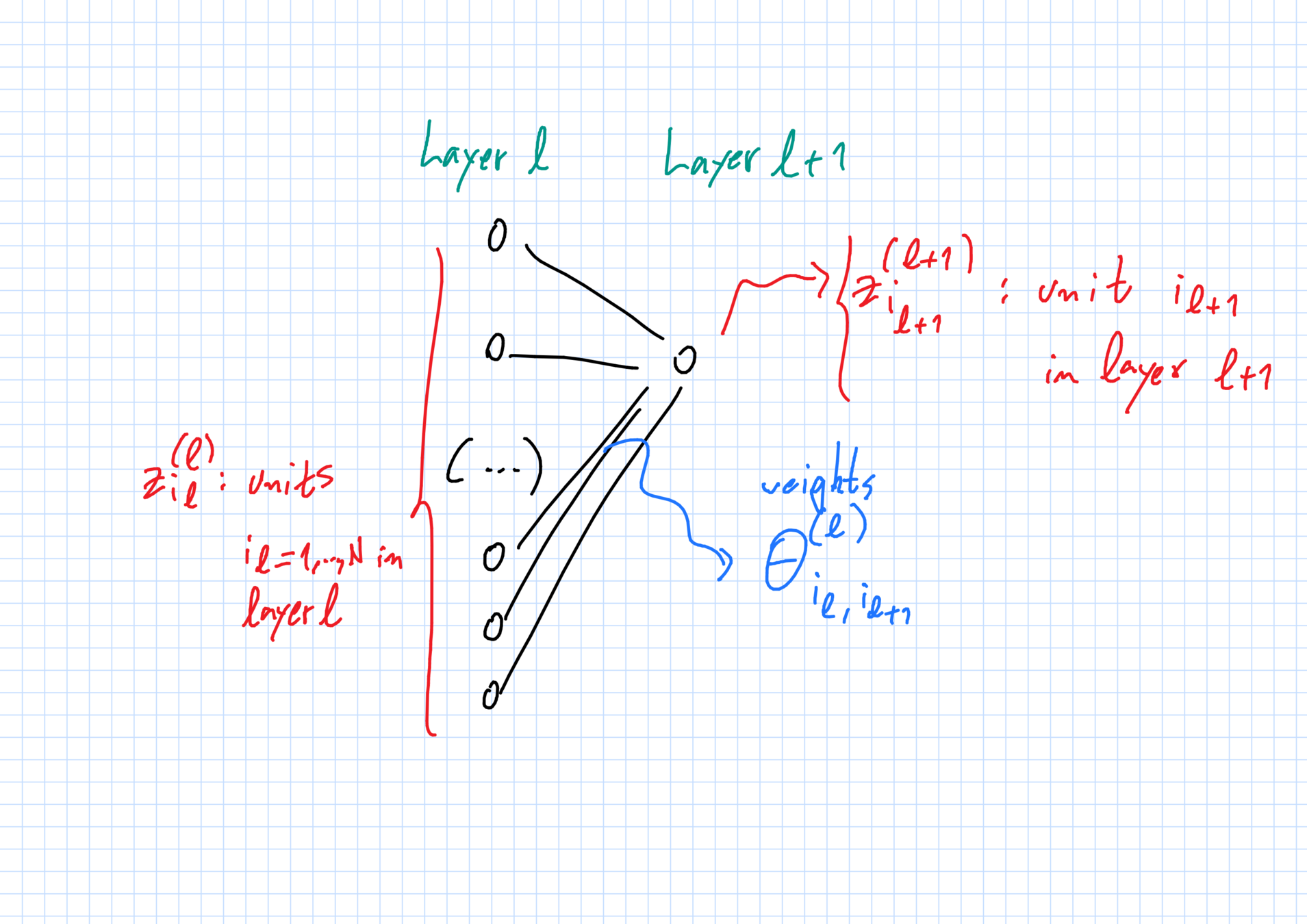
The network: weights
"Weight" \(\theta^{(\ell)}_{i_\ell,i_{\ell+1}}\in\mathbb{R}^{D_\ell}\):
- \(i_\ell\)-th unit in layer \(\ell\) \(\to\) \(i_{\ell+1}\)-th unit in layer \(\ell+1\).
Full vector of weights: \(\vec{\theta}_N\).
Initialization:
- all weights are independent random variables;
- weights with superscript \(\ell\) have same law \(\mu^{(\ell)}_0\).
First hidden layer
z^{(1)}_{i_1}(x,\vec{\theta}_N):= \sigma^{(0)}_*(x,\theta^{(1)}_{1,i_1})
Hidden layers \(2\leq \ell\leq L\)
z^{(\ell+1)}_{i_{\ell+1}}(x,\vec{\theta}_N):= \frac{1}{N_\ell}\sum_{i_\ell=1}^{N_\ell}\sigma^{(\ell)}_*(z^{(\ell)}_{i_\ell}(x,\vec{\theta}_N),\theta^{(\ell)}_{i_\ell,i_{\ell+1}})
Function & loss
z^{(L+1)}_{1}(x,\vec{\theta}_N):= \frac{1}{N_L}\sum_{i_L=1}^{N_L}\sigma^{(L)}_*(z^{(\ell)}_{i_\ell}(x,\vec{\theta}_N),\theta^{(L)}_{i_L,i_{1}})
At output layer \(L+1\), \(N_{L+1}=1\).
\widehat{y}(x,\vec{\theta}_N) := \sigma^{(L+1)}_*(z^{(L+1)}_1(x,\vec{\theta}_N))
L_N(\vec{\theta}_N):= \frac{1}{2}\mathbb{E}_{(X,Y)\sim P}\,\|Y - \widehat{y}(X,\vec{\theta}_N)\|^2
Weights evolve via SGD
Weights close to input \(A_{i_1}:=\theta^{(0)}_{1,i_1}\) and output \(B_{i_L}:=\theta^{(L)}_{i_L,1}\) are not updated ("random features").
All other weights \(\theta^{(\ell)}_{i_\ell,i_{\ell+1}}\) (\(1\leq \ell\leq L-1)\): SGD with step size \(\epsilon\) and fresh samples at each iteration.
For \(\epsilon\ll 1\), \(N\gg 1\), after change in time scale, same as:
\[\frac{d}{dt}\vec{\theta}_N(t) = -N^2\, \nabla L_N(\vec{\theta}_N(t))\]
(\(N^2\) steps of SGD \(\sim 1\) time unit in the limit)
Limiting behavior when \(N\to+\infty, \epsilon\to 0\)
Limiting laws of the weights
Assume \(L\geq 3\) hidden layers + technicalities.
One can couple the weights \(\theta^{(\ell)}_{i_\ell,i_{\ell+1}}(t)\) to certain limiting random variables \(\overline{\theta}^{(\ell)}_{i_\ell,i_{\ell+1}}(t)\) with small error:
\mathbb{E}\,|\theta^{(\ell)}_{i_\ell,i_{\ell+1}}(t) - \overline{\theta}^{(\ell)}_{i_\ell,i_{\ell+1}}(t)|\leq C^Le^{cT}\,\left(\epsilon + \sqrt{\frac{D}{N}}\right)
Limiting random variables coincide with the weights at time 0. They also satisfy a series of properties we will describe below.
Dependence structure
Full independence except at 1st and Lth hidden layers:
The following are all independent from one another.
- \(\overline{\theta}_{1,i}^{(1)}(t)\equiv A_i\) (random feature weights);
- \(\overline{\theta}_{j,1}^{(L)}(t)\equiv B_j\) (random output weights); and
- \(\overline{\theta}^{(\ell)}_{i_\ell,i_{\ell+1}} [0,T]\) with \(2\leq \ell \leq L\) (weight trajectories).
1st and Lth hidden layers are deterministic functions:
- \(\overline{\theta}^{(1)}_{i_1,i_2}[0,T]\) \(=\) \(F^{(1)}(A_{i_1},\theta^{(1)}_{i_1,i_2}(0))\)
- \(\overline{\theta}^{(L)}_{i_L,i_{L+1}}[0,T]\)\(=\) \(F^{(L)}(B_{i_{L+1}},\theta^{(L)}_{i_L,i_{L+1}}(0))\)
Dependencies along a path
Distribution \(\mu_t\) of limiting weights along a path at time \(t\),
\[(A_{i_1},\overline{\theta}^{(1)}_{i_1,i_2}(t),\overline{\theta}^{(2)}_{i_2,i_3}(t),\dots,\overline{\theta}^{(L)}_{i_L,i_{L+1}}(t),B_{i_{L+1}})\sim \mu_t\]
has the following factorization into independent components:
\[\mu_t = \mu^{(0,1)}_t\otimes \mu^{(2)}_t \otimes \dots \otimes \mu_{t}^{(L-1)}\otimes \mu_t^{(L,L+1)}.\]
Contrast with time 0 (full product).
The limiting function & loss
\left\{\begin{array}{lll}\overline{z}^{(2)}(x,t)&:= & \int\,\sigma_*^{(1)}(\sigma_*^{(0)}(x,a),\theta)\,d\mu_t^{(0,1)}(a,\theta);\\ \\ {\rm For}\; \ell=3,\dots,L: & & \\
\overline{z}^{(\ell)}(x,t)&:= & \int\,\sigma_*^{(\ell-1)}(\overline{z}^{(\ell-1)}(x,t),\theta)\,d\mu_t^{(\ell-1)}(\theta);\\
\\
\overline{y}(x,t) &:=& \int\,\sigma_*^{(L+1)}(\sigma_*^{(L)}(\overline{z}^{(L)}(x,t),\theta),b) d\mu_t^{(L,L+1)}(\theta,b).\end{array}\right.
At any time \(t\), the loss of function \(\widehat{y}(x,\vec{\theta}_N(t))\) is approximately the loss composition of functions of the generic form \(\int\,h(x,\theta)\,dP(\theta)\). Specifically,
\[L_N(\vec{\theta}_N)\approx \frac{1}{2}\mathbb{E}_{(X,Y)\sim P }\,\|Y - \overline{y}(X,t)\|^2\] where
Where is this coming from?
Limit evolution of weights
- Form of drift depends only on layer of the weight.
- Involves the weight itself, the densities of weights in other layers and (for \(\ell=1,L\)) nearby weights.
\left\{\begin{array}{lll}\dot{\theta}^{(1)}_{i_1,i_2}(t) &= &\psi^{(1)}(\theta^{(1)}_{i_1,i_2}(t),A_{i_1},\mu_t); \\ \\ {\rm For}\;2\leq \ell\leq L-2: \\
\dot{\theta}^{(\ell)}_{i_\ell,i_\ell+1}(t) &= &\psi^{(1)}(\theta^{(\ell)}_{i_\ell,i_{\ell+1}}(t),\mu_t); \\
\\
\dot{\theta}^{(L-1)}_{i_{L-1},i_L}(t) &= &\psi^{(L-1)}(\theta^{(L-1)}_{i_{L-1},i_L}(t),B_{i_L},\mu_t).
\end{array}\right.
Result of averaging, LLN
McKean-Vlasov structure
Ansatz:
- Terms involving a large number of random weights can be replaced by interactions with their density.
- The densities only depend on the layer of the weight.
\(\Rightarrow\) McKean-Vlasov type of behavior.
Next slides: traditional McKean-Vlasov
Abstract McKean-Vlasov
\left\{\begin{array}{lll}Z(0)&\sim & \mu_0\,\\
\dot{Z}(t)&=& \psi(t,Z(t),\mu_t) + \sigma \dot{B}_t\,\,(t\geq 0)\\
\end{array}\right.
Consider:
- \(M_1(\mathbb{R}^D)\) = all prob. distributions over \(R^D\),
- measures \(\mu_t\in M_1(\mathbb{R}^D)\) for \(t\geq 0\);
- noise level \(\sigma\geq 0\);
- drift function \(\psi:\mathbb{R}\times \mathbb{R}^D\times M_1(\mathbb{R}^D)\to \mathbb{R}^D\);
- A random trajectory:
Self-consistency: \(Z(t)\sim \mu_t\) for all times \(t\geq 0\)
Existence and uniqueness
\left\{\begin{array}{lll}Z(0)&\sim & \mu_0\,\\
\dot{Z}(t)&=& \psi(t,Z(t),\mu_t) + \sigma \dot{B}_t\,\,(t\geq 0)\\
\end{array}\right.
Under reasonable conditions, for any initial measure \(\mu_0\) there exists a unique trajectory
\[t\geq 0\mapsto \mu_t\in M_1(\mathbb{R}^D)\]
such that any random process \(Z\) satisfying
satisfies the McKean-Vlasov consistency property:
\[Z(t)\sim \mu_t, t\geq 0.\]
[McKean'1966, Gärtner'1988, Sznitman'1991, Rachev-Ruschendorf'1998,...]
PDE descripition
\left\{\begin{array}{lll}Z(0)&\sim & \mu_0\,\\
\dot{Z}(t)&=& \psi(t,Z(t),\mu_t) + \sigma \dot{B}_t\,\,(t\geq 0)\\
\end{array}\right.
Density \(p(t,x)\) of \(\mu_t\) evolves according to a (possibly) nonlinear PDE.
\partial_t p(t,x) = \frac{\sigma^2}{2}\Delta_x p(t,x) + \nabla_x\cdot (\psi(t,x,\mu_t)\,p(t,x))
nonlinearity comes from \(\mu_t\sim p(t,x)\)
Mean-field particle systems
Meta-theorem:
Consider a system of \(N\gg 1\) evolving particles with mean field interactions.
If no single particle "prevails", then the thermodynamic limit is a McKean-Vlasov process.
Important example:
Mei-Montanari-Nguyen for networks with \(L=1\).
Mei - Montanari - Nguyen
Function computed by network:
\[\widehat{y}(x,\vec{\theta}_N) = \frac{1}{N}\sum_{i=1}^N\sigma_*(x,\theta_i).\]
Loss:
\[L_N(\vec{\theta}_N):=\frac{1}{2}\mathbb{E}_{(X,Y)\sim P}(Y-\widehat{y}(X,\vec{\theta}_N))^2\]
Mei - Montanari - Nguyen
Evolution of particle \(i\) in the right time scale:
\dot\theta_i(t)\\ = -\gamma \,\int\,\,\left\{[y- (\widehat{\mu}_{N,t}\,\sigma_*(x,\cdot))]\, \partial_\theta\sigma_*(x,\theta_i(t))\right\}\,dP(x,y) \\ = \psi(\theta_i(t),\widehat{\mu}_{N,t})
where
\[\widehat{\mu}_{N,t}:= \frac{1}{N}\sum_{i=1}^N \delta_{\theta_i(t)}.\]
Informal derivation
Assume a LLN holds and a deterministic limiting density \[\widehat{\mu}_{N,t}\to \mu_t\] emerges for large \(N\). Then particles should follow:
\dot\theta_i(t) = \psi(\theta_i(t),\mu_t)
In particular, independence at time 0 is preserved at all times. Also limiting self consistency:
Typical \(\theta_i(t)\sim \widehat{\mu}_{N,t}\approx \mu_t\).
A "coupling" construction
Let \(\mu_t,t\geq 0\) be the McK-V solution to
\[Z(0)\sim \mu_0, \frac{d}{dt}Z(t) = \psi(Z(t),\mu_t),Z(t)\sim \mu_t.\]
Now consider trajectories \(\overline{\theta}_i[0,T]\) of the form:
\[\overline{\theta}_i(0):=\theta_i(0),\; \frac{d}{dt}\overline{\theta}_i(t) = \psi(\overline{\theta}_i(t),\mu_t).\]
Then:
\[\mathbb{E}|\theta_i(t) - \overline{\theta}_i(t)|\leq Ce^{CT}\,(\epsilon + (D/N)^{1/2}).\]
Main consequence
At any time \(t\geq 0\),
\[|L_N(\vec{\theta}_N(t)) - L(\mu_t)| \leq C_t\,(\epsilon + N^{-1/2}),\]
where, for \(\mu\in M_1(\mathbb{R}^d)\),
\[L(\mu) = \frac{1}{2}\mathbb{E}_{(X,Y)\sim P}\left(Y - \int_{\R^d}\,\sigma_*(X,\theta)\,d\mu(\theta)\right)^2.\]
McKean-Vlasov in our setting
What about our setting?
The abstract McK-V framework is still useful. However, the dependencies in our system are trickier.
- Before: basic units are individual weights. Expected to remain i.i.d. at all times when \(N\gg 1\). Direct connection between system and i.i.d. McK-V trajectories.
- Now: basic units are paths. Will not have i.i.d. trajectories even in the limit because the paths intersect.
What saves the day:
dependencies we expect from the limit are manageable.
Many paths \(\Rightarrow\) LLN
Finding the right McKean-Vlasov equation
Deep McK-V: activations
Recursion at time t:
\begin{array}{clll}(1)_r & z_{i_1}^{(1)}(x,\vec{\theta}_N(t)) & = & \sigma_*^{(0)}(x,A_{i_1});\\ \\
(2)_r & z_{i_2}^{(2)}(x,\vec{\theta}_N(t)) & = & \frac{1}{N}\sum_{i=1}^N\sigma_*^{(1)}(z_{i_1}^{(1)}(x,\vec{\theta}_N),\theta^{(1)}_{i_1,i_2}(t));\\ \\ & {\rm leads\;to} & & \\ \\ (2)_l & \overline{z}^{(2)}(x,t) & =& \int\,\eta^{(1)}(x,a,b)\,d\mu^{(0,1)}_t(a,b)\\
& & & {\rm where}\; \mu^{(0,1)}_t = {\rm law\;of\;}(A_{i_1},\overline{\theta}^{(1)}_{i_1,i_2}(t))\end{array}
Deep McK-V: activations
Recursion at time t for \(\ell=2,3,\dots,L+1\):
\begin{array}{crll}
(\ell)_r & z_{i_{\ell}}^{(\ell)}(x,\vec{\theta}_N(t)) & = & \frac{1}{N}\sum_{i=1}^N\sigma_*^{(\ell-1)}(z_{i_{\ell-1}}^{(\ell-1)},\theta^{(\ell-1)}_{i_{\ell-1},i_{\ell}}(t));\\ \\ & {\rm leads\;to} & & \\ \\ (\ell)_l & \overline{z}^{(\ell)}(x,t) & =& \int\,\sigma_*^{(\ell-1)}(\overline{z}^{(\ell-1)}(x,t),b)\,d\mu^{(\ell-1)}_t(b) \\ & & & {\rm where}\;\mu^{(\ell-1)}_t ={\rm law\;of}\; \theta_{i_{\ell-1},i_{\ell}}^{(\ell-1)}(t) \end{array}
Deep McK-V: backprop
Backwards recursion:
Recall \(\widehat{y}(x,\vec{\theta}_N)=\sigma^{(L+1)}(z^{(L)}_1(x,\vec{\theta}_N))\). Define:
\begin{array}{lcl}& & M_{i_{\ell+1}}(x,\vec{\theta}_N(t)):= \\ & &
D\sigma_*^{(L+1)}(z^{(L+1)}_{1}(x,\vec{\theta}_N(t)))\\ & \times & D_z\sigma^{(L)}(z^{(L)}_{i_L}(x,\vec{\theta}_N(t)),B_{i_L})\\ & \times &
D_z\sigma^{(L-1)}(z^{(L-1)}_{i_{L-1}}(x,\vec{\theta}_N(t)),\theta^{(L)}_{i_{L-1},i_L}(t))\\ & \times &
\dots\\ & \times & D_z\sigma^{(\ell+1)}(z^{(\ell+1)}_{i_{\ell+1}}(x,\vec{\theta}_N(t)),\theta^{(\ell+1)}_{i_{\ell+1},i_{\ell+2}}(t))\end{array}
Deep McK-V: backprop
Limiting version:
For \(\ell\leq L-2\), define:
\begin{array}{lcl}& & \overline{M}^{(\ell)}(x,t)\\ := & &
D\sigma_*^{(L+1)}(\overline{z}^{(L+1)}(x,t))\\ & \times & \int\,D_z\sigma^{(L)}(\overline{z}^{(L)}(x,t),b)\,D_z\sigma^{(L-1)}(\overline{z}^{(L-1)}(x,t),a)\,d\mu^{(L-1,L)}(b,a)\\
\dots\\ & \times & \int\,D_z\sigma^{(\ell+1)}(\overline{z}^{(\ell+1)}(x,t),b')\,d\mu^{(\ell+1)}(b')\end{array}
Deep McK-V: backprop
For \(2\leq \ell\leq L-2\), backprop formula:
N^2\nabla_{\theta^{(\ell)}_{i_\ell,i_{\ell+1}}}L_N(\vec{\theta}_N(t)) \\
= M_{i_{\ell+1}}(x,\vec{\theta}_N(t))\,D_\theta\sigma_*^{(\ell)}(z_{i_\ell}^{(\ell)}(x,\vec{\theta}_N(x)),\theta_{i_\ell,i_{\ell+1}}^{(\ell)}(t)),
is replaced in the evolution of \(\overline{\theta}^{(\ell)}_{i_\ell,i_{\ell+1}}\) by:
\[\overline{M}^{(\ell+1)}(x,t)\,D_\theta\sigma^{(\ell)}_*(\overline{z}^{(\ell)}(x,t),\overline{\theta}^{(\ell)}_{i_\ell,i_{\ell+1}}(t))\]
Deep McK-V: the upshot
For \(2\leq \ell\leq L-2\), the time derivative of \(\overline{\theta}^{(L)}(t)\) should take the form
\mathbb{E}_{(X,Y)\sim P}[\overline{v}^{(\ell)}(X,Y,t)^T\,D_\theta\sigma^{(\ell)}_*(\overline{z}^{(L)}(X,t),\overline{\theta}^{(\ell)}(t))],
where the \(\overline{z}\) are determined by the marginals:
v(x,y,t):=M_{i_{\ell+1}}(x,\vec{\theta}_N(t))^T\,[y - \sigma^{(L+1)}(\overline{z}^{(L+1)}(x,t))]
Deep McK-V: proof (I)
Find unique McK-V process \((\mu_t)_{t\geq 0}\) that should correspond to weights on a path from input to output:
\[(A_{i_1},\theta^{(1)}_{i_1,i_2}(t),\dots,\theta^{(L-1)}_{i_{L-1},i_{L}}(t),B_{i_{L}})\approx \mu_t.\]
Prove that trajectories have the right dependency structure.
\[\mu_{[0,T]} = \mu^{(0,1)}_{[0,T]}\otimes \mu^{(2)}_{[0,T]} \otimes \mu_{[0,T]}^{(L-1)}\otimes \mu_{[0,T]}^{(L,L+1)}.\]
Deep McK-V: proof (II)
Populate the network with limiting weight trajectories:
1. I.i.d. part:
Generate i.i.d. random variables: \[A_{i_1}\sim \mu_0^{(0)},B_{i_L}\sim \mu^{(L+1)}_0, \overline{\theta}_{i_\ell,i_{\ell+1}^{(\ell)}([0,T])}\sim \mu^{(\ell)}_{[0,T]}\,(2\leq \ell\leq L-2)\]
2. Conditionally independent part:
For each pair \(i_1,i_2\), generate \(\theta^{(1)}_{i_1,i_2}([0,T])\) from the conditional measure \(\mu^{(0,1)}_{[0,T]}\) given the weight \(A_{i_1}\). Similarly for weights \(\theta^{(L-1)}_{i_{L-1},i_L}\).
Deep McK-V: proof (III)
The limiting weights we generated coincide with true weights at time 0. From McK-V drift conditions, can check via Gronwall's inequality that limiting and true weights are close.
\left\{\begin{array}{lll}\dot{\theta}^{(1)}_{i_1,i_2}(t) &= &\psi^{(1)}(\theta^{(1)}_{i_1,i_2}(t),A_{i_1},\mu_t); \\ \\ {\rm For}\;2\leq \ell\leq L-2: \\
\dot{\theta}^{(\ell)}_{i_\ell,i_\ell+1}(t) &= &\psi^{(1)}(\theta^{(\ell)}_{i_\ell,i_{\ell+1}}(t),\mu_t); \\
\\
\dot{\theta}^{(L-1)}_{i_{L-1},i_L}(t) &= &\psi^{(L-1)}(\theta^{(L-1)}_{i_{L-1},i_L}(t),B_{i_L},\mu_t).
\end{array}\right.
Limiting system of McKean-Vlasov PDEs
Here is an illustration of what the system does to us.
[Public domain/Wikipedia]

Problems & extensions
What goes wrong if weights close to input and output are allowed to change over time?
These evolve at a faster time scale.
Cannot be dealt with via our techniques.
Requires deeper understanding of the limit.
However: if input has \(D\approx N\) i.i.d. coordinates, no need for random features.
(90% probability of this statement being correct)
Problems & extensions
The limiting PDE for the measures is horrendous!
True, but this leads to an interesting problem.
Forget SGD: start from a blank slate!
- Consider functions that are compositions of things of the form that a DNN computes in the limit.
\(x\mapsto h_{P}(x):= \int\,h(x,\theta)\,dP(\theta)\) where \(P\in M_1(\mathbb{R}^{D})\).
- What is the best way to optimize over this class of functions? Minimax bounds?
Thank you!
KITP talk
By Roberto Imbuzeiro M. F. de Oliveira




