Mean-field description
of some
Deep Neural Networks
Dyego Araújo
Roberto Imbuzeiro Oliveira
Daniel Yukimura

Current uses of DNNs
- Image recognition and classification
- Machine translation
- Game playing (...)
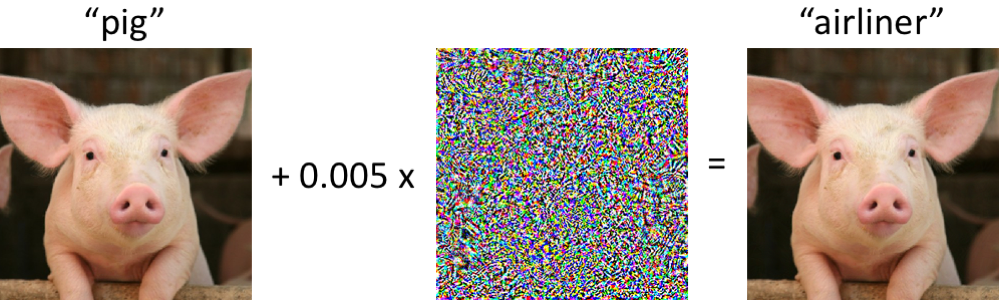
Huge improvements & lots of vulnerabilities!

Current questions
- How does learning take place?
- What kind of regression method are they?
- So many parameters, why doesn't variance blow up?
- How do we avoid vulnerabilities?
Today
At the end of the talk, we will still not know the answers ...
... but we will get a glimpse of mathematical methods we should use to describe the networks.
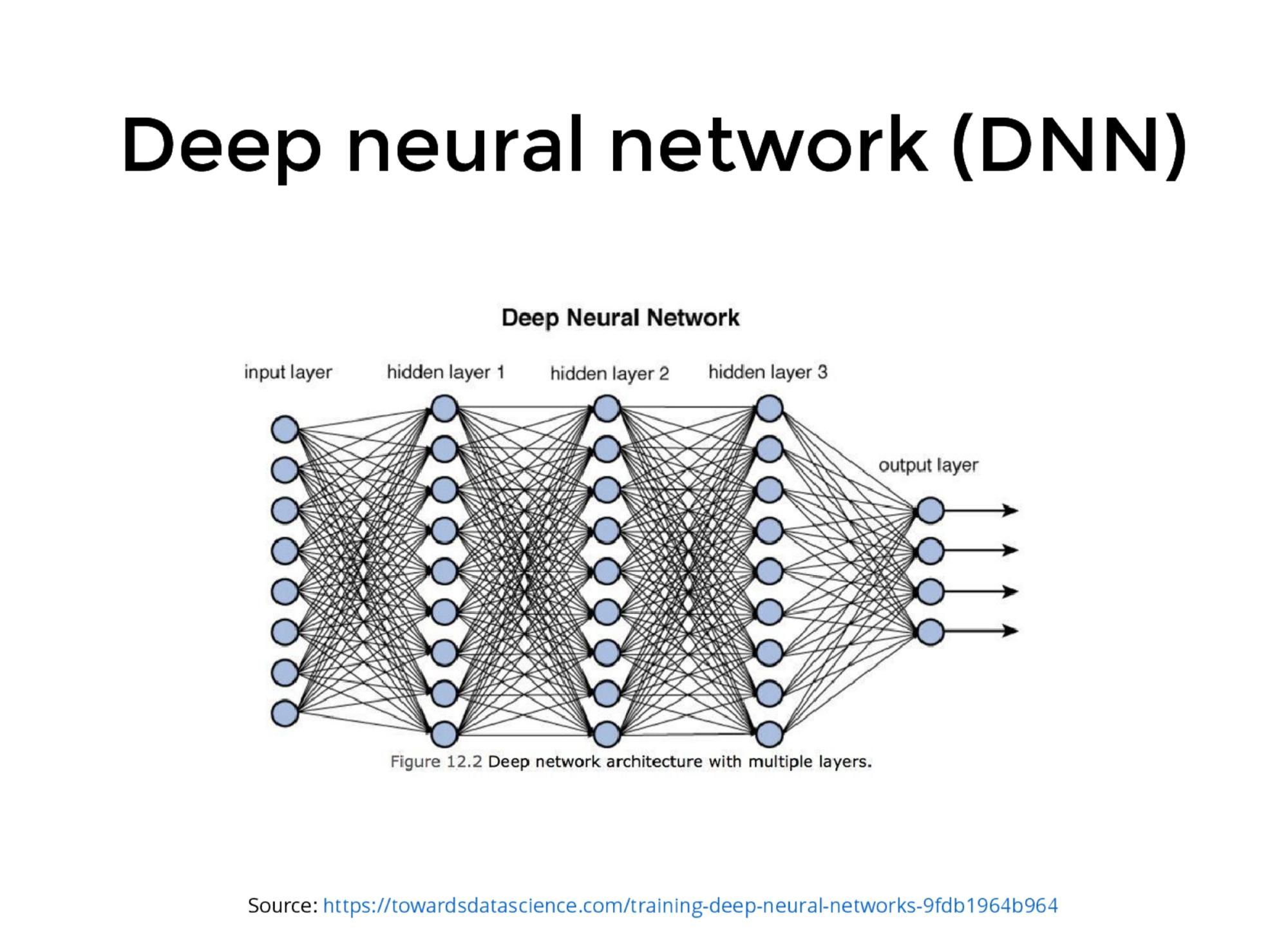
What is a deep neural network?
Perceptron = single neuron
\(x_1\)
\(x_1\)
\(x_2\)
\(x_3\)
Input
\(x_3\)
\(\theta_1\)
\(\theta_2\)
\(\theta_3\)
\(a,b\)
Weights
\(a\phi(\sum_ix_i\theta_i + b)\)
Output
(Rosenblatt'59)
Total # of parameters \(10^7\) to \(10^9 \).
Learning
Data: points \((X_i,Y_i)\stackrel{\rm i.i.d.}{\sim}\,P\) \(\R^{d_X}\times \R^{d_Y}\).
Network: parameterized function \(\widehat{y}:\R^{d_X}\times \R^{D_N}\to \R^{d_Y}\).
Train: (stochastic online) gradient descent
\[\theta^{(k+1)} = \theta^{(k)} - \epsilon \alpha^{(k)}\,(Y_{k+1}-\widehat{y}(X_{k+1},\theta^{(k)}))^T \nabla_\theta \widehat{y}(X_{k+1},\theta^{(k)}).\]
In expectation, this follows the gradient of loss:
\[L(\theta):=\frac{1}{2}\mathbb{E}_{(X,Y)\sim P}\|Y - \widehat{y}(X,\theta)\|^2 .\]
Does it converge to a min?
"Double descent" for
bias-variance tradeoff
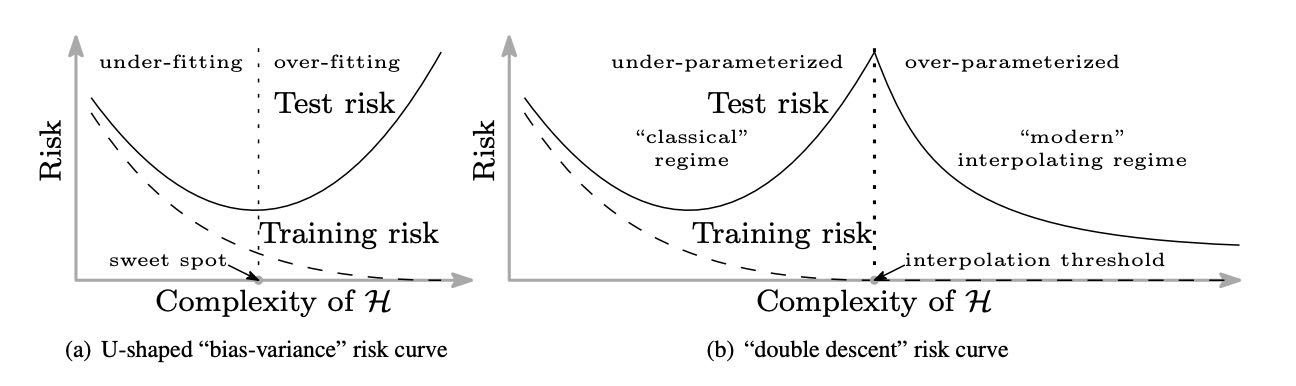
Source: https://arxiv.org/abs/1812.11118
Belkin, Hsu, Ma & Mandal (2018)
Working assumptions
- We should look for a limiting object for a network with a diverging number of parameters (*)
- First step: understanding what happens to the DNN when trained.
(*) See Ongie, Willett, Soudry & Srebo https://arxiv.org/abs/1910.01635
A first glimpse
- Consider functions that are compositions of things of the form that a DNN computes in the limit.
\(x\mapsto h_{\mu}(x):= \int\,h(x,\theta)\,d\mu(\theta)\) where \(\mu\in M_1(\mathbb{R}^{D})\).
- A DNN is like a composition of such functions that tries to learn "optimal parameters" \(\mu\) for each layer via gradient descent.
Our networks
Independent random initialization of weights
Our networks

Independent random initialization of weights
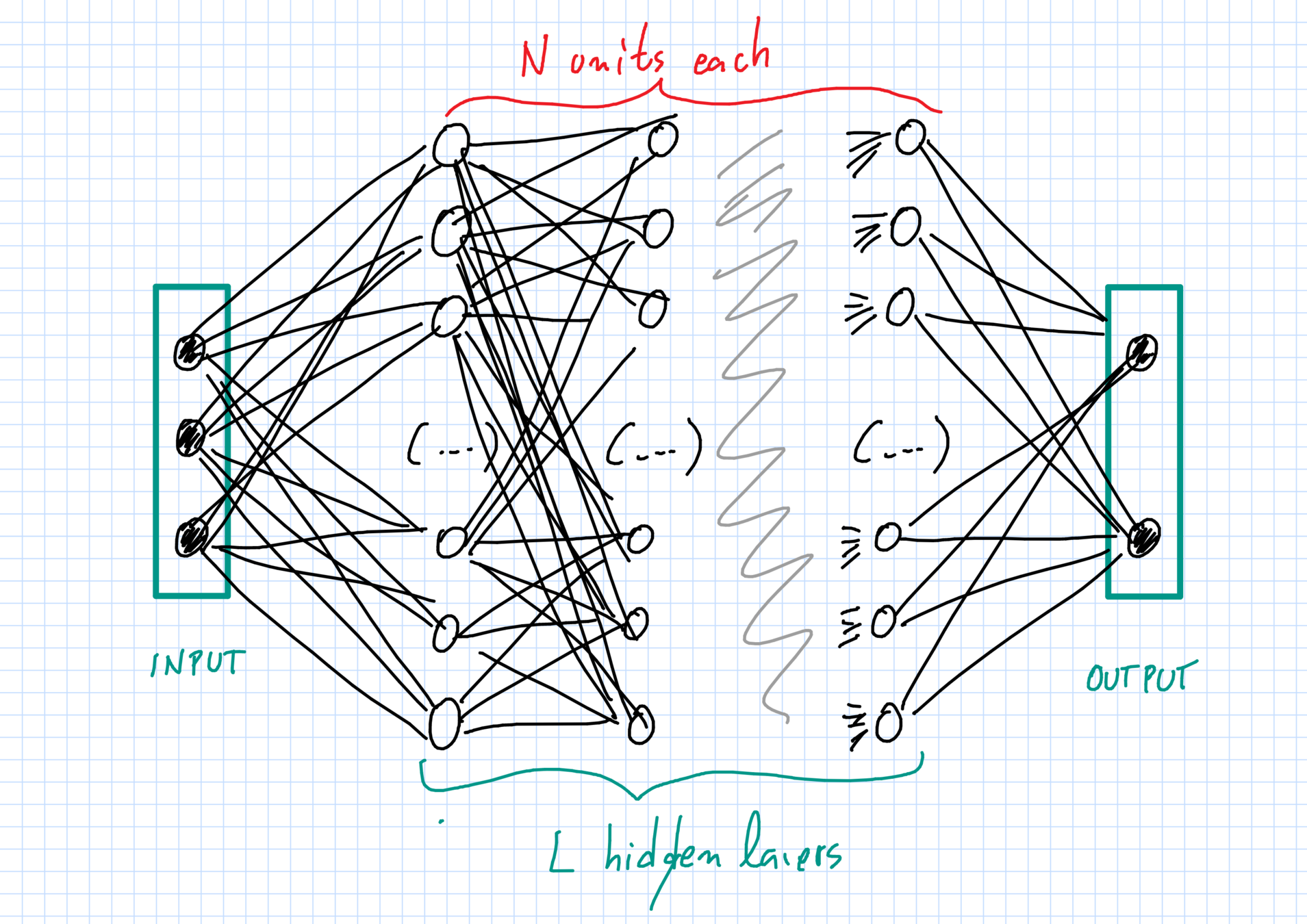
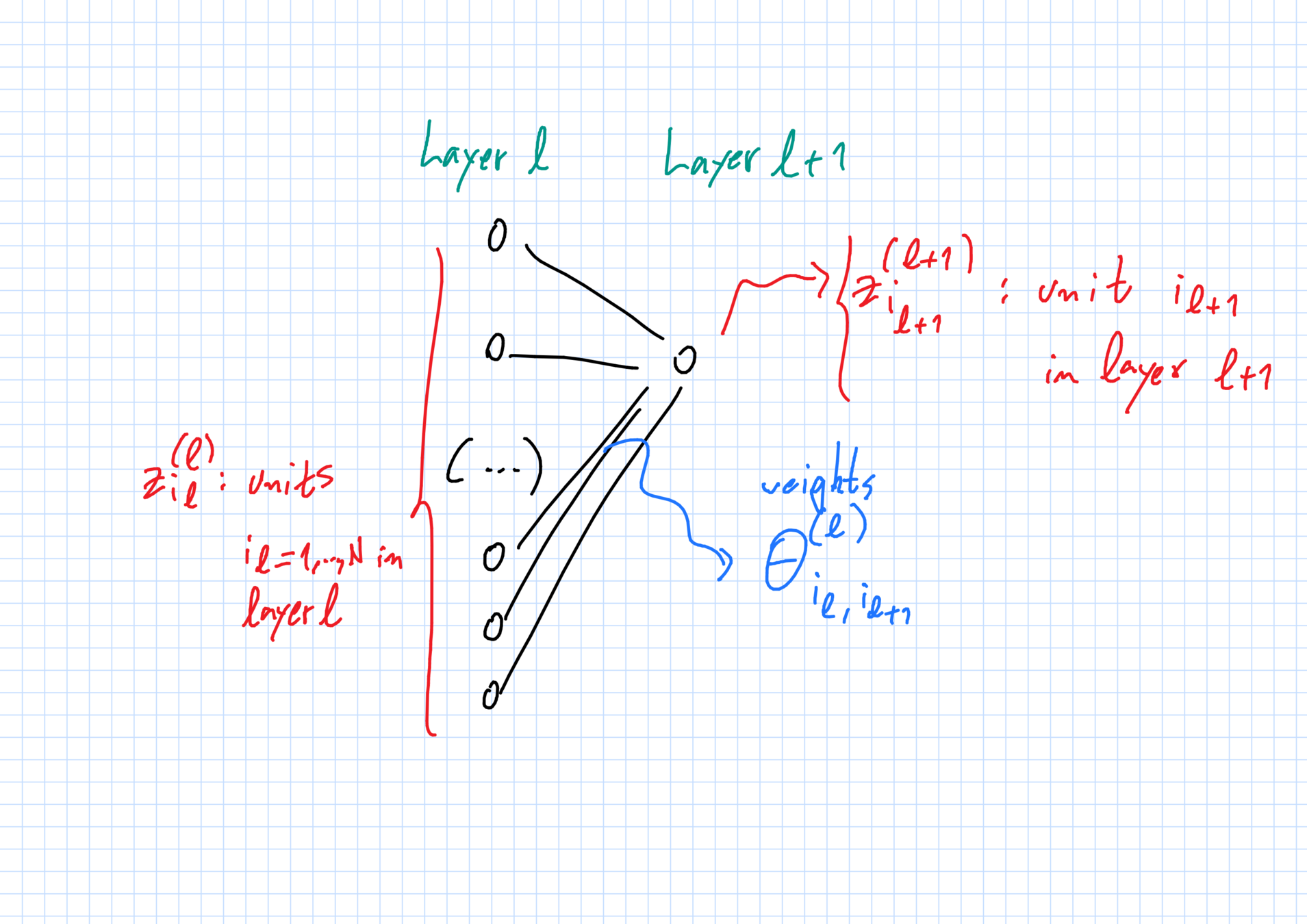
The network: layers & units
Layers \(\ell=0,1,\dots,L,L+1\):
- \(\ell=0\) input and \(\ell=L+1\) output;
- \(\ell=1,\dots,L\) hidden layers.
Each layer \(\ell\) has \(N_\ell\) units of dimension \(d_\ell\).
- \(N_0 = N_{L+1}=1\), one input \(+\) one output unit;
- \(N_\ell=N\gg 1 \) neurons in hidden layers, with \(1\leq \ell\leq L\).
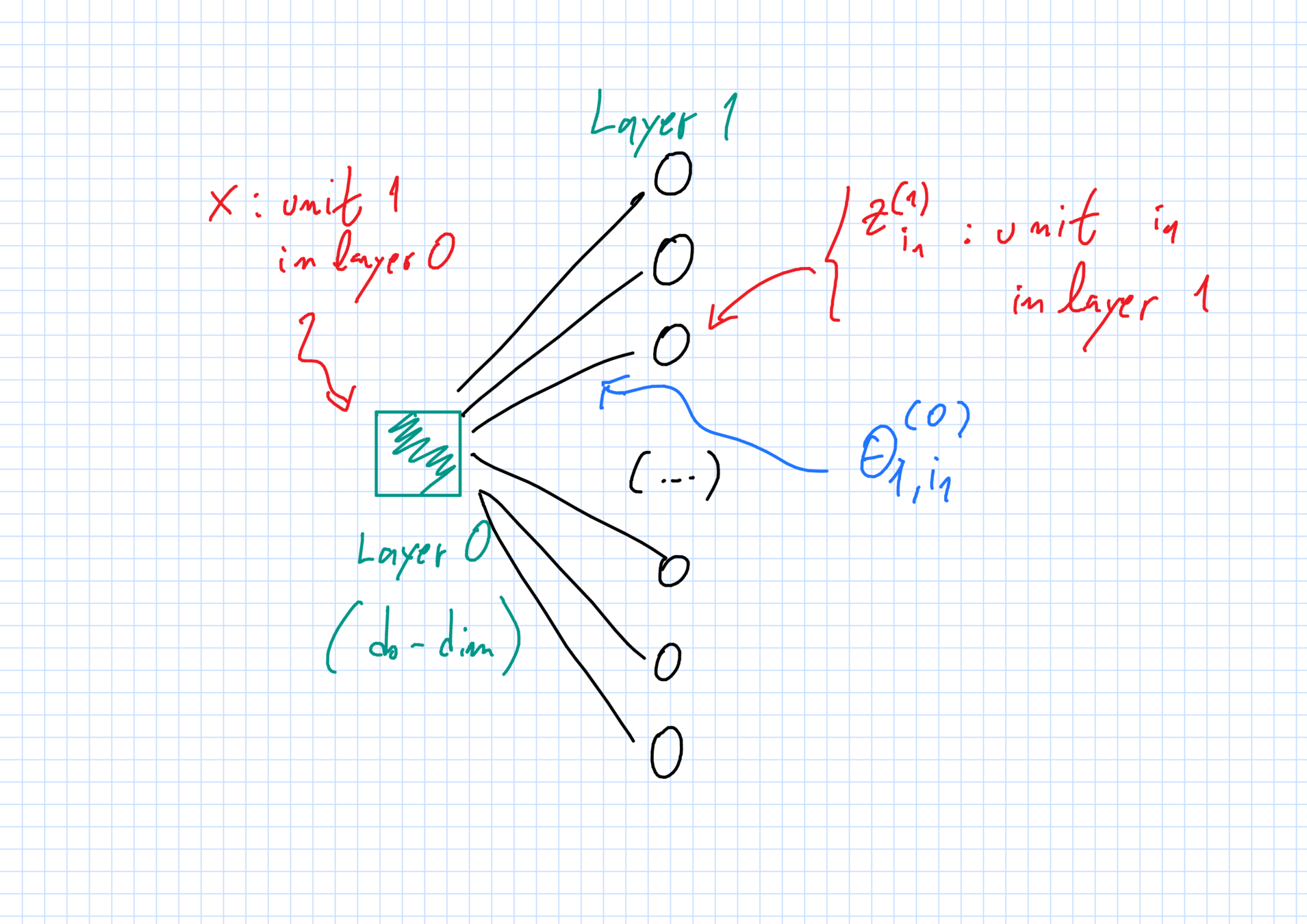
The network: weights
"Weight" \(\theta^{(\ell)}_{i_\ell,i_{\ell+1}}\in\mathbb{R}^{D_\ell}\):
- \(i_\ell\)-th unit in layer \(\ell\) \(\to\) \(i_{\ell+1}\)-th unit in layer \(\ell+1\).
Full vector of weights: \(\vec{\theta}_N\).
Initialization:
- all weights are independent random variables;
- weights with superscript \(\ell\) have same law \(\mu^{(\ell)}_0\).
First hidden layer
z^{(1)}_{i_1}(x,\vec{\theta}_N):= \sigma^{(0)}_*(x,\theta^{(1)}_{1,i_1})
Hidden layers \(2\leq \ell\leq L\)
z^{(\ell+1)}_{i_{\ell+1}}(x,\vec{\theta}_N):= \frac{1}{N_\ell}\sum_{i_\ell=1}^{N_\ell}\sigma^{(\ell)}_*(z^{(\ell)}_{i_\ell}(x,\vec{\theta}_N),\theta^{(\ell)}_{i_\ell,i_{\ell+1}})
Function & loss
z^{(L+1)}_{1}(x,\vec{\theta}_N):= \frac{1}{N_L}\sum_{i_L=1}^{N_L}\sigma^{(L)}_*(z^{(\ell)}_{i_\ell}(x,\vec{\theta}_N),\theta^{(L)}_{i_L,i_{1}})
At output layer \(L+1\), \(N_{L+1}=1\).
\widehat{y}(x,\vec{\theta}_N) := \sigma^{(L+1)}_*(z^{(L+1)}_1(x,\vec{\theta}_N))
L_N(\vec{\theta}_N):= \frac{1}{2}\mathbb{E}_{(X,Y)\sim P}\,\|Y - \widehat{y}(X,\vec{\theta}_N)\|^2
Limiting behavior when \(N\to+\infty, \epsilon\to 0\)
Limiting laws of the weights
Assume \(L\geq 3\) hidden layers + technicalities on \(\sigma\).
One can couple the weights \(\theta^{(\ell)}_{i_\ell,i_{\ell+1}}(t)\) to certain limiting random variables \(\overline{\theta}^{(\ell)}_{i_\ell,i_{\ell+1}}(t)\) with small error:
\mathbb{E}\,|\theta^{(\ell)}_{i_\ell,i_{\ell+1}}(t) - \overline{\theta}^{(\ell)}_{i_\ell,i_{\ell+1}}(t)|\leq C(L,T)\,\left(\epsilon + \sqrt{\frac{D}{N}}\right)
Limiting random variables coincide with the weights at time 0 & satisfy a series of properties we will now describe.
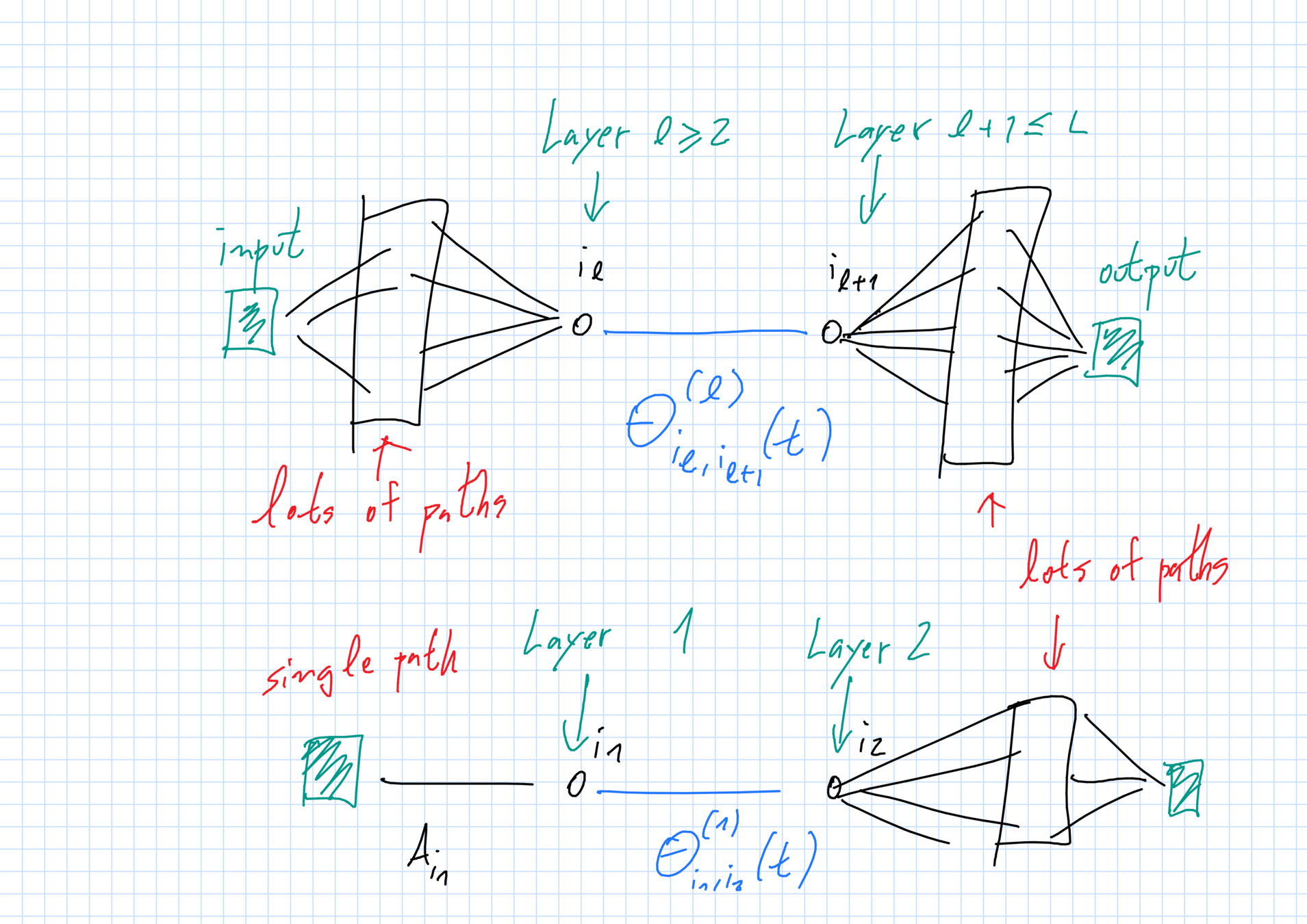
Dependence structure
Full independence except at 1st and Lth hidden layers:
The following are all independent from one another.
- \(\overline{\theta}_{1,i}^{(1)}(t)\equiv A_i\) (random feature weights);
- \(\overline{\theta}_{j,1}^{(L)}(t)\equiv B_j\) (random output weights); and
- \(\overline{\theta}^{(\ell)}_{i_\ell,i_{\ell+1}} [0,T]\) with \(2\leq \ell \leq L\) (weight trajectories).
1st and Lth hidden layers are deterministic functions:
- \(\overline{\theta}^{(1)}_{i_1,i_2}[0,T]\) \(=\) \(F^{(1)}(A_{i_1},\theta^{(1)}_{i_1,i_2}(0))\)
- \(\overline{\theta}^{(L)}_{i_L,i_{L+1}}[0,T]\)\(=\) \(F^{(L)}(B_{i_{L+1}},\theta^{(L)}_{i_L,i_{L+1}}(0))\)
Dependencies along a path
Distribution \(\mu_t\) of limiting weights along a path at time \(t\),
\[(A_{i_1},\overline{\theta}^{(1)}_{i_1,i_2}(t),\overline{\theta}^{(2)}_{i_2,i_3}(t),\dots,\overline{\theta}^{(L)}_{i_L,i_{L+1}}(t),B_{i_{L+1}})\sim \mu_t\]
has the following factorization into independent components:
\[\mu_t = \mu^{(0,1)}_t\otimes \mu^{(2)}_t \otimes \dots \otimes \mu_{t}^{(L-1)}\otimes \mu_t^{(L,L+1)}.\]
Contrast with time 0 (full product).
The limiting function & loss
\left\{\begin{array}{lll}\overline{z}^{(2)}(x,\mu_t)&:= & \int\,\sigma_*^{(1)}(\sigma_*^{(0)}(x,a),\theta)\,d\mu_t^{(0,1)}(a,\theta);\\ \\ {\rm For}\; \ell=3,\dots,L: & & \\
\overline{z}^{(\ell)}(x,\mu_t)&:= & \int\,\sigma_*^{(\ell-1)}(\overline{z}^{(\ell-1)}(x,\mu_t),\theta)\,d\mu_t^{(\ell-1)}(\theta);\\
\\
\overline{y}(x,\mu_t) &:=& \int\,\sigma_*^{(L+1)}(\sigma_*^{(L)}(\overline{z}^{(L)}(x,t),\theta),b) d\mu_t^{(L,L+1)}(\theta,b).\end{array}\right.
At any time \(t\), the loss of function \(\widehat{y}(x,\vec{\theta}_N(t))\) is approximately the loss composition of functions of the generic form \(\int\,h(x,\theta)\,dP(\theta)\). Specifically,
\[L_N(\vec{\theta}_N)\approx \frac{1}{2}\mathbb{E}_{(X,Y)\sim P }\,\|Y - \overline{y}(X,\mu_t)\|^2\] where
Where is this coming from?
Backprop & McKean-Vlasov
Backpropagation (Hinton?): chain rule describes partial derivatives as sums of paths going back and forward in the network
Ansatz: Terms involving a large number of random weights can be replaced by interactions with their density (a law of large numbers).
\(\Rightarrow\) McKean-Vlasov type of behavior.
Abstract McKean-Vlasov
\left\{\begin{array}{lll}Z(0)&\sim & \mu_0\,\\
\dot{Z}(t)&=& \psi(t,Z(t),\mu_t) + \sigma \dot{B}_t\,\,(t\geq 0)\\
\end{array}\right.
Consider:
- \(M_1(\mathbb{R}^D)\) = all prob. distributions over \(R^D\),
- measures \(\mu_t\in M_1(\mathbb{R}^D)\) for \(t\geq 0\);
- noise level \(\sigma\geq 0\);
- drift function \(\psi:\mathbb{R}\times \mathbb{R}^D\times M_1(\mathbb{R}^D)\to \mathbb{R}^D\);
- A random trajectory:
Self-consistency: \(Z(t)\sim \mu_t\) for all times \(t\geq 0\)
Structure of PDE
Density \(p(t,x)\) of \(\mu_t\) evolves according to a (possibly) nonlinear PDE.
\partial_t p(t,x) = \frac{\sigma^2}{2}\Delta_x p(t,x) + \nabla_x\cdot (\psi(t,x,\mu_t)\,p(t,x))
In the case of shallow (\(L=1\)) nets, this corresponds to a
gradient flow with convex potential in the space of probability measures over \(\R^D\).
Ambriosio, Gigli, Savaré, Figalli, Otto, Villani...
Shallow vs deep nets
Shallow:
Mei, Montanari & Nguyen (2018); Sirignano & Spiliopoulos (2018); Rotskoff & Vanden Einjden (2018).
"Easy case".
Deep (before us):
Modified limit by S&S (2019).
Heuristic by Nguyen (2019).
Hard case: discontinuous drift in McKean-Vlasov
New issues
Dependencies in our system are trickier.
- Before: basic units = individual weights.
Remain i.i.d. at all times when \(N\gg 1\). Direct connection between system and i.i.d. McK-V trajectories.
- Now: basic units are paths.
Will not have i.i.d. trajectories even in the limit because the paths intersect. Also, McK-V is discontinuous due to conditioning appearing in the drifts.
Many paths \(\Rightarrow\) LLN
Limiting system of McKean-Vlasov PDEs
It looks like this.
[Public domain/Wikipedia]

A "blank slate"
- Consider functions that are compositions of things of the form that a DNN computes in the limit.
\(x\mapsto h_{\mu}(x):= \int\,h(x,\theta)\,d\mu(\theta)\) where \(\mu\in M_1(\mathbb{R}^{D})\).
- What other methods can be used to optimize the choices of the distributions \(\mu\)?
Thank you!

Merida_DNN
By Roberto Imbuzeiro M. F. de Oliveira




